
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (7): 240575-.doi: 10.12382/bgxb.2024.0575
王博洋1,2,*( ), 李欣萍1, 宋俊杰3, 关海杰1, 刘海鸥1, 陈慧岩1
), 李欣萍1, 宋俊杰3, 关海杰1, 刘海鸥1, 陈慧岩1
收稿日期:2024-07-15
上线日期:2025-08-12
通讯作者:
基金资助:
WANG Boyang1,2,*(), LI Xinping1, SONG Junjie3, GUAN Haijie1, LIU Hai’ou1, CHEN Huiyan1
Received:2024-07-15
Online:2025-08-12
摘要:
为解决以拟人化行为基元序列为期望轨迹的无人车轨迹跟踪控制问题,提出了一种行为基元离线优化与在线博弈协调相结合的轨迹跟踪控制方法。以从真实驾驶数据中直接提取出的行为基元库为根基,通过基于模型的非线性优化方法,生成满足车辆运动学特性约束的行为基元库;通过粒子群算法离线寻优得到行为基元库中各类别基元的最优控制参量,并采用多层感知机建立控制器最优参量与行为基元类别之间的映射关系;在对基元内控制参量进行优化的基础上,以在线博弈协调控制方法为核心,实现行为基元间的最优控制参量生成。试验结果表明,所提出的融合行为基元优化与博弈的控制方法,能够显著提升对行为基元序列的跟踪控制精度,并有效解决各独立行为基元间的稳定平滑过渡问题。
王博洋, 李欣萍, 宋俊杰, 关海杰, 刘海鸥, 陈慧岩. 融合行为基元优化与博弈的轨迹跟踪控制方法[J]. 兵工学报, 2025, 46(7): 240575-.
WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination[J]. Acta Armamentarii, 2025, 46(7): 240575-.

图1 融合行为基元优化与博弈的轨迹跟踪控制方法整体流程图
Fig.1 Flowchart of trajectory tracking control method incorporating behavior primitive optimization and game coordination
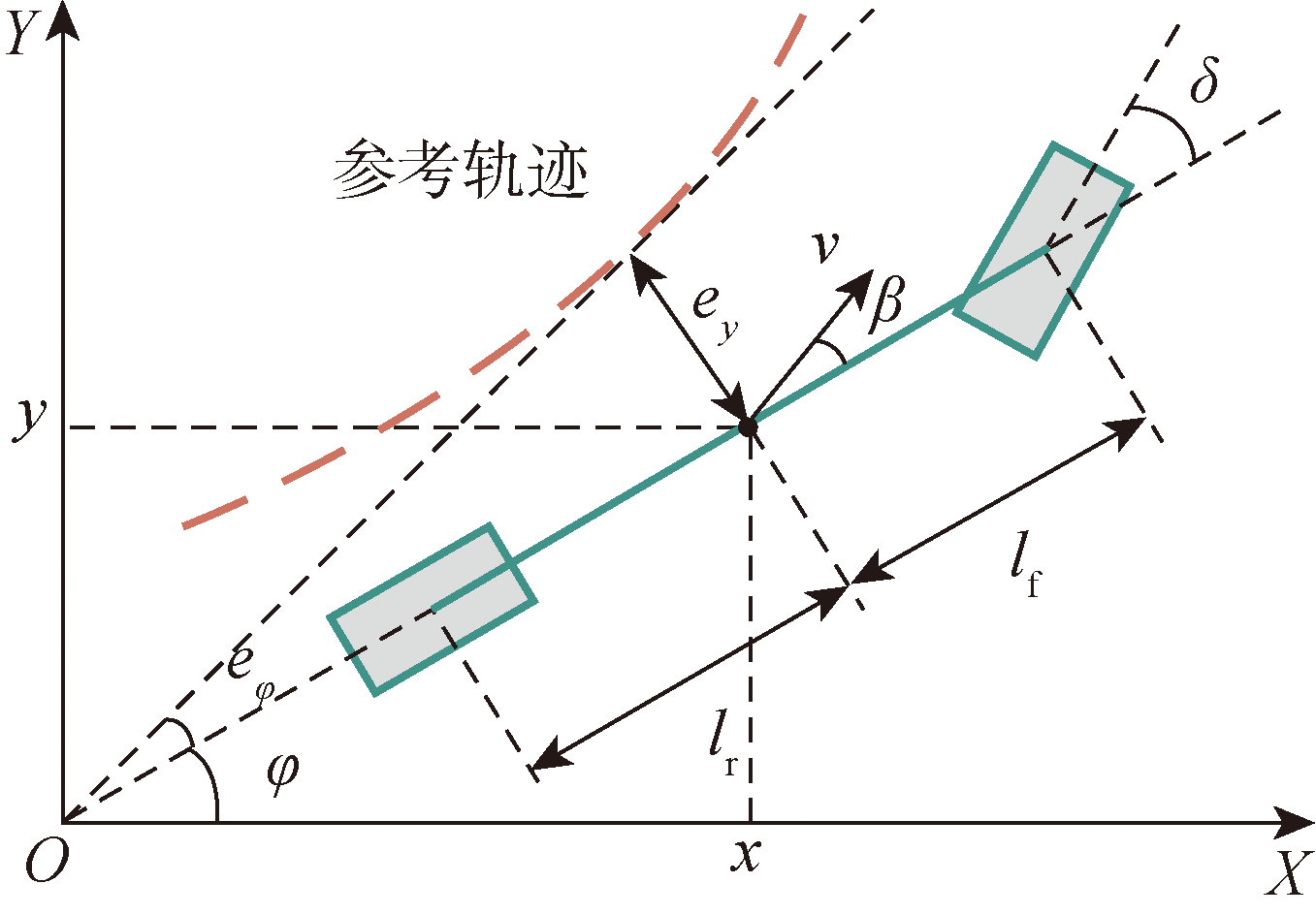
图2 车辆运动学模型
Fig.2 Vehicle kinematic model
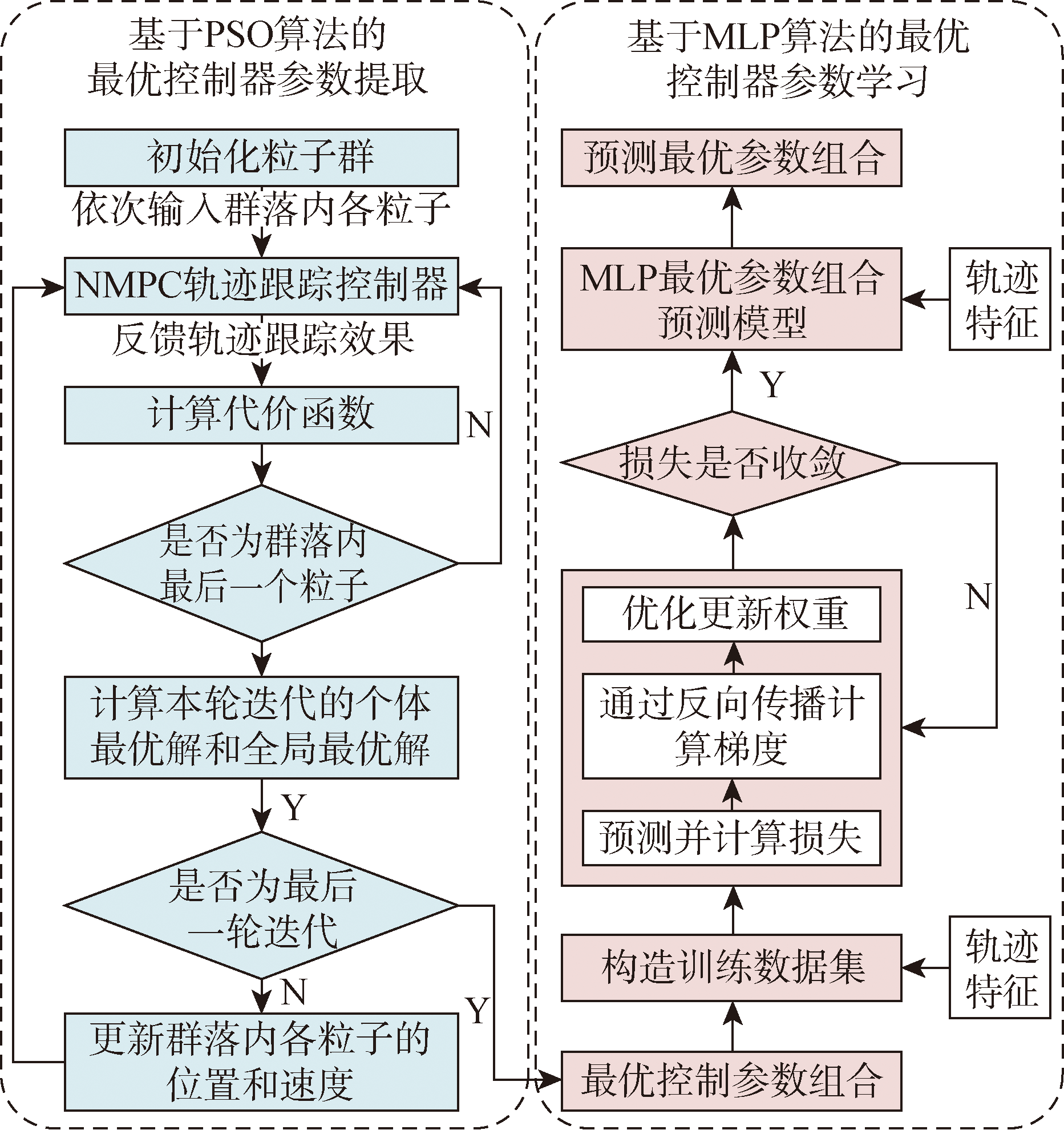
图3 控制器参数学习模块算法流程图
Fig.3 Flowchart of controller parameter optimization algorithm

图4 MLP算法原理图
Fig.4 Algorithm schematic diagram of MLP

图5 博弈协调控制策略原理图
Fig.5 Schematic diagram of game coordinated control strategy
| 类型编码 | 泛化方式 | DMP | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 12 | 262 | 410 | 543 | 48 |
| 终点泛化 | DMP2 | 8 | 162 | 321 | 611 | 33 | |
| DMP3 | 13 | 354 | 601 | 340 | 50 | ||
| 转向泛化 | DMP2 | 6 | 142 | 757 | 823 | 48 | |
| DMP3 | 16 | 107 | 130 | 250 | 92 | ||
| 15 (单移线) | 未泛化 | DMP1 | 6 | 420 | 85 | 225 | 840 |
| 终点泛化 | DMP2 | 5 | 409 | 93 | 230 | 749 | |
| DMP3 | 7 | 353 | 81 | 211 | 814 | ||
| 转向泛化 | DMP2 | 6 | 673 | 92 | 398 | 555 | |
| DMP3 | 6 | 624 | 104 | 362 | 354 |
表1 MLP模型预测最优控制器参数
Table 1 Optimal controller parameters predicted by MLP model
| 类型编码 | 泛化方式 | DMP | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 12 | 262 | 410 | 543 | 48 |
| 终点泛化 | DMP2 | 8 | 162 | 321 | 611 | 33 | |
| DMP3 | 13 | 354 | 601 | 340 | 50 | ||
| 转向泛化 | DMP2 | 6 | 142 | 757 | 823 | 48 | |
| DMP3 | 16 | 107 | 130 | 250 | 92 | ||
| 15 (单移线) | 未泛化 | DMP1 | 6 | 420 | 85 | 225 | 840 |
| 终点泛化 | DMP2 | 5 | 409 | 93 | 230 | 749 | |
| DMP3 | 7 | 353 | 81 | 211 | 814 | ||
| 转向泛化 | DMP2 | 6 | 673 | 92 | 398 | 555 | |
| DMP3 | 6 | 624 | 104 | 362 | 354 |

图6 J形弯行为基元优化结果
Fig.6 Optimized results of J-turn DMP
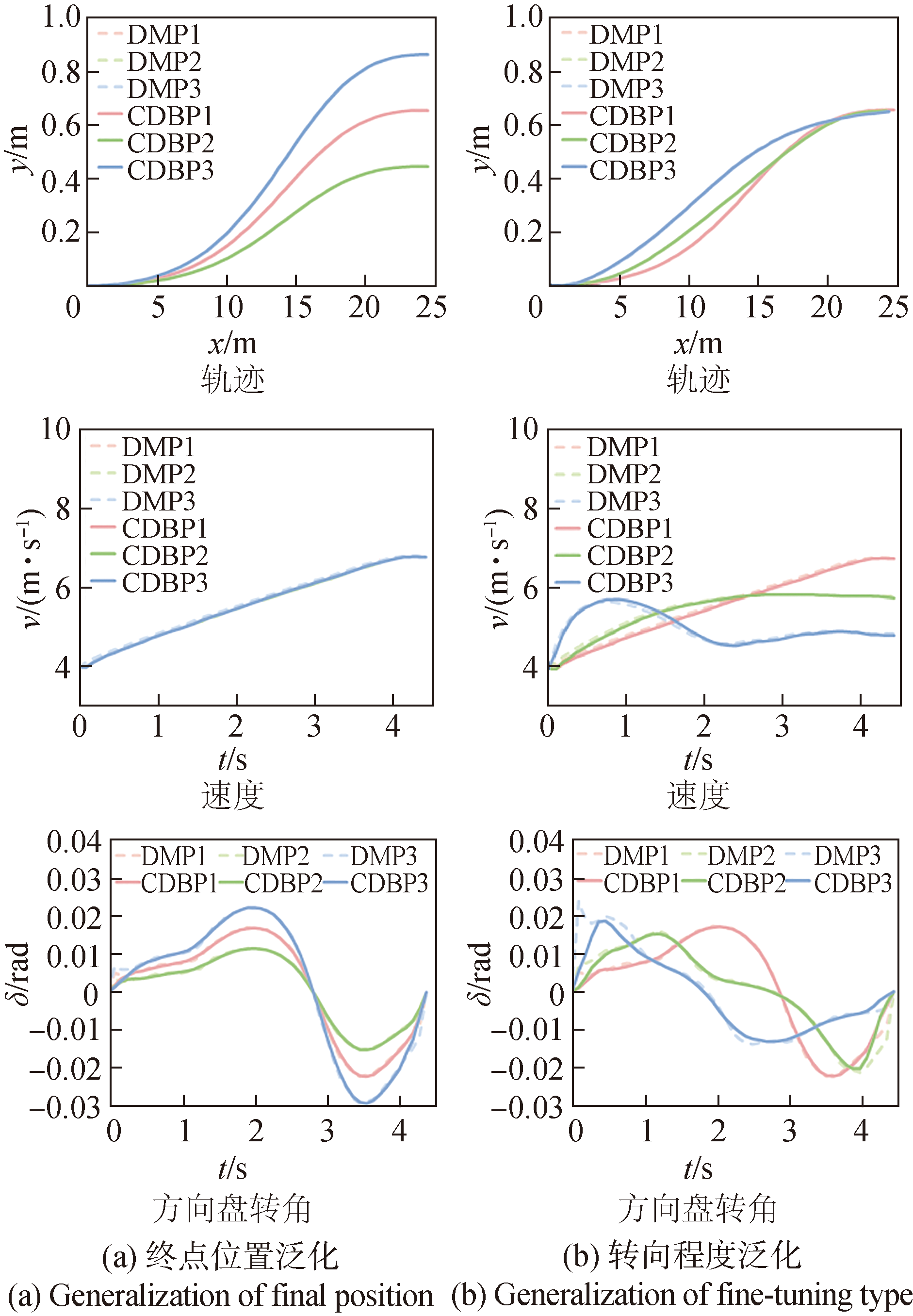
图7 单移线行为基元优化结果
Fig.7 Optimized results of lane-changing DMP
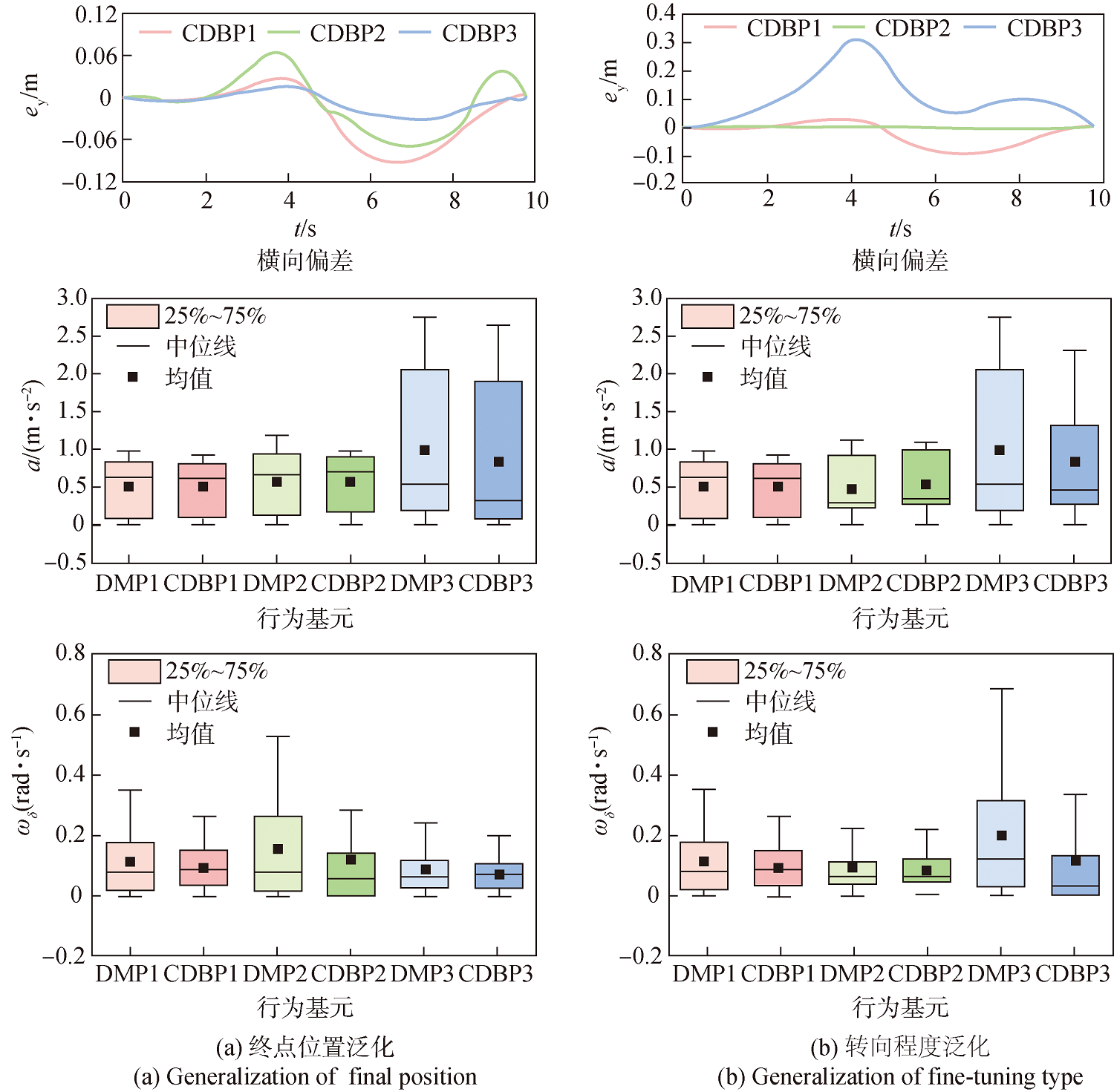
图8 J形弯行为基元优化结果分析
Fig.8 Analysis of J-turn DMP optimized results
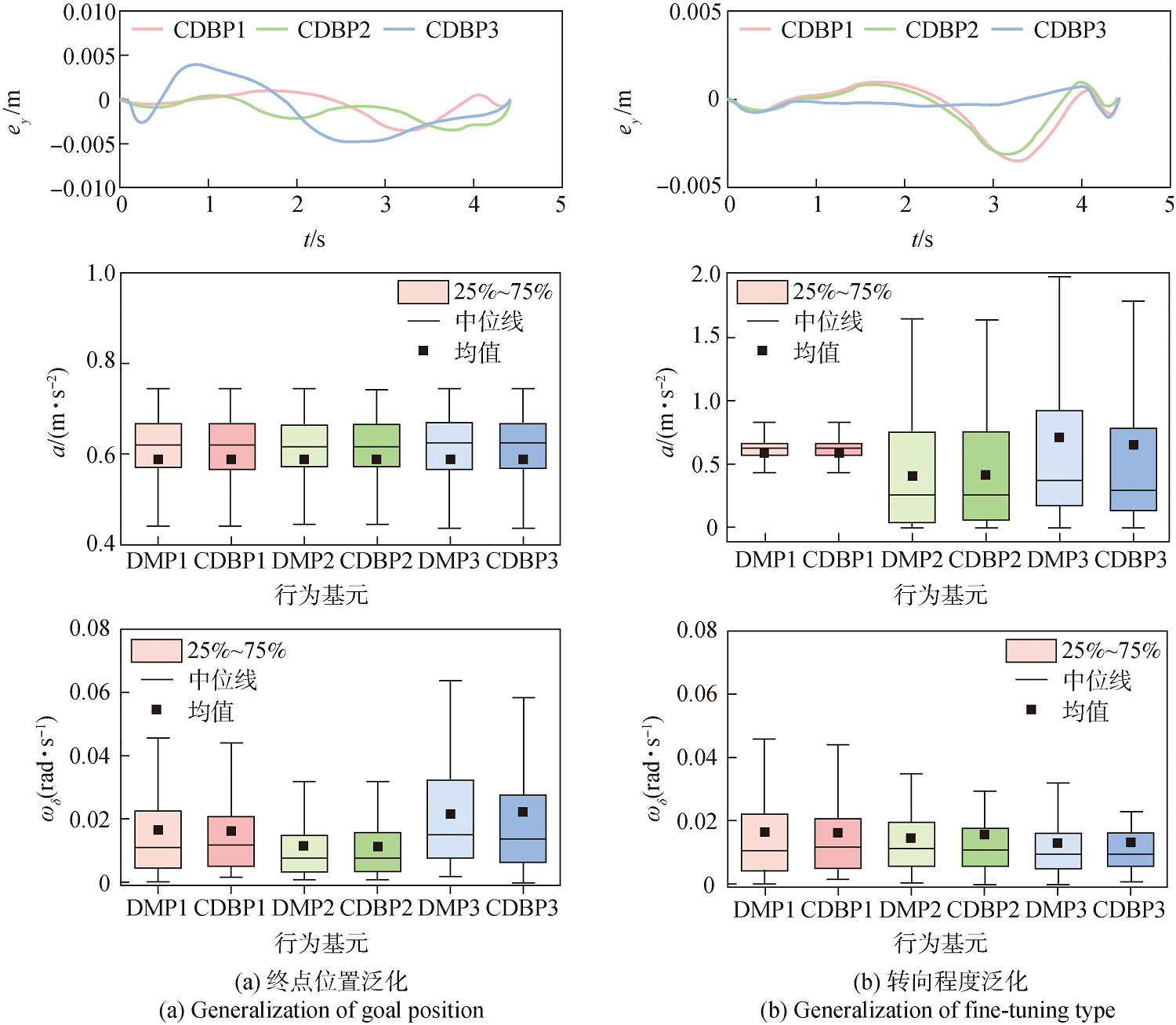
图9 单移线行为基元优化结果分析
Fig.9 Analysis of lane-changing DMP pptimizated results
| 类型编码 | 泛化方式 | DMP | /m | eymax/m | / (m·s-1) | evmax/ (m·s-1) |
|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 0.0319 | 0.0934 | 0.1438 | 0.2771 |
| 终点泛化 | DMP2 | 0.0316 | 0.0706 | 0.1590 | 0.3348 | |
| DMP3 | 0.0123 | 0.0327 | 0.3513 | 0.6700 | ||
| 转向泛化 | DMP2 | 0.0315 | 0.0080 | 0.3178 | 0.5328 | |
| DMP3 | 0.1080 | 0.3112 | 0.3398 | 1.4057 | ||
| 15 (单移线) | 未泛化 | DMP1 | 0.0010 | 0.0036 | 0.0584 | 0.1212 |
| 终点泛化 | DMP2 | 0.0014 | 0.0036 | 0.0583 | 0.1211 | |
| DMP3 | 0.0026 | 0.0050 | 0.0584 | 0.1212 | ||
| 转向泛化 | DMP2 | 0.0009 | 0.0032 | 0.0416 | 0.1636 | |
| DMP3 | 0.0004 | 0.0012 | 0.0593 | 0.1982 |
表2 轨迹优化后的拟人化特征偏差分析
Table 2 Deviation analysis of human-like features after trajectory optimization
| 类型编码 | 泛化方式 | DMP | /m | eymax/m | / (m·s-1) | evmax/ (m·s-1) |
|---|---|---|---|---|---|---|
| 2 (J形弯) | 未泛化 | DMP1 | 0.0319 | 0.0934 | 0.1438 | 0.2771 |
| 终点泛化 | DMP2 | 0.0316 | 0.0706 | 0.1590 | 0.3348 | |
| DMP3 | 0.0123 | 0.0327 | 0.3513 | 0.6700 | ||
| 转向泛化 | DMP2 | 0.0315 | 0.0080 | 0.3178 | 0.5328 | |
| DMP3 | 0.1080 | 0.3112 | 0.3398 | 1.4057 | ||
| 15 (单移线) | 未泛化 | DMP1 | 0.0010 | 0.0036 | 0.0584 | 0.1212 |
| 终点泛化 | DMP2 | 0.0014 | 0.0036 | 0.0583 | 0.1211 | |
| DMP3 | 0.0026 | 0.0050 | 0.0584 | 0.1212 | ||
| 转向泛化 | DMP2 | 0.0009 | 0.0032 | 0.0416 | 0.1636 | |
| DMP3 | 0.0004 | 0.0012 | 0.0593 | 0.1982 |
| 参数 | 数值 |
|---|---|
| 质心距离前轴距离lf/m | 1.040 |
| 质心距离后轴距离lr/m | 1.560 |
| 最大加速度约束amax/(m·s-2) | 3 |
| 最大前轮转角δmax/rad | 0.584 |
表3 车辆参数
Table 3 The parameters of vehicle in Carsim model
| 参数 | 数值 |
|---|---|
| 质心距离前轴距离lf/m | 1.040 |
| 质心距离后轴距离lr/m | 1.560 |
| 最大加速度约束amax/(m·s-2) | 3 |
| 最大前轮转角δmax/rad | 0.584 |
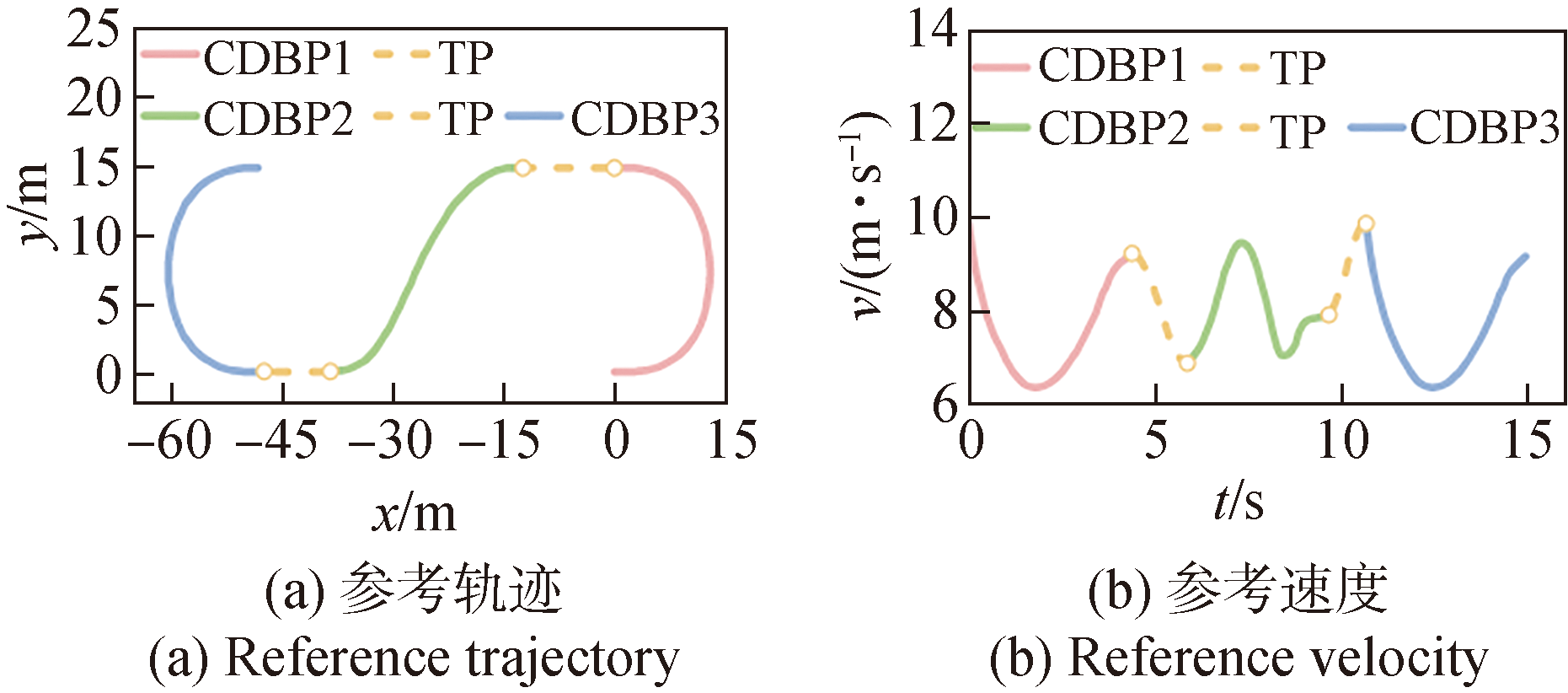
图10 S形弯参考轨迹及参考速度
Fig.10 Reference trajectory and velocity of S-turn
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| U形弯基元 | 10 | 502 | 652 | 158 | 110 |
| 单移线基元 | 14 | 732 | 513 | 215 | 902 |
表4 S形弯MLP模型预测最优控制器参数
Table 4 MLP online prediction of optimal controller parameters
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| U形弯基元 | 10 | 502 | 652 | 158 | 110 |
| 单移线基元 | 14 | 732 | 513 | 215 | 902 |
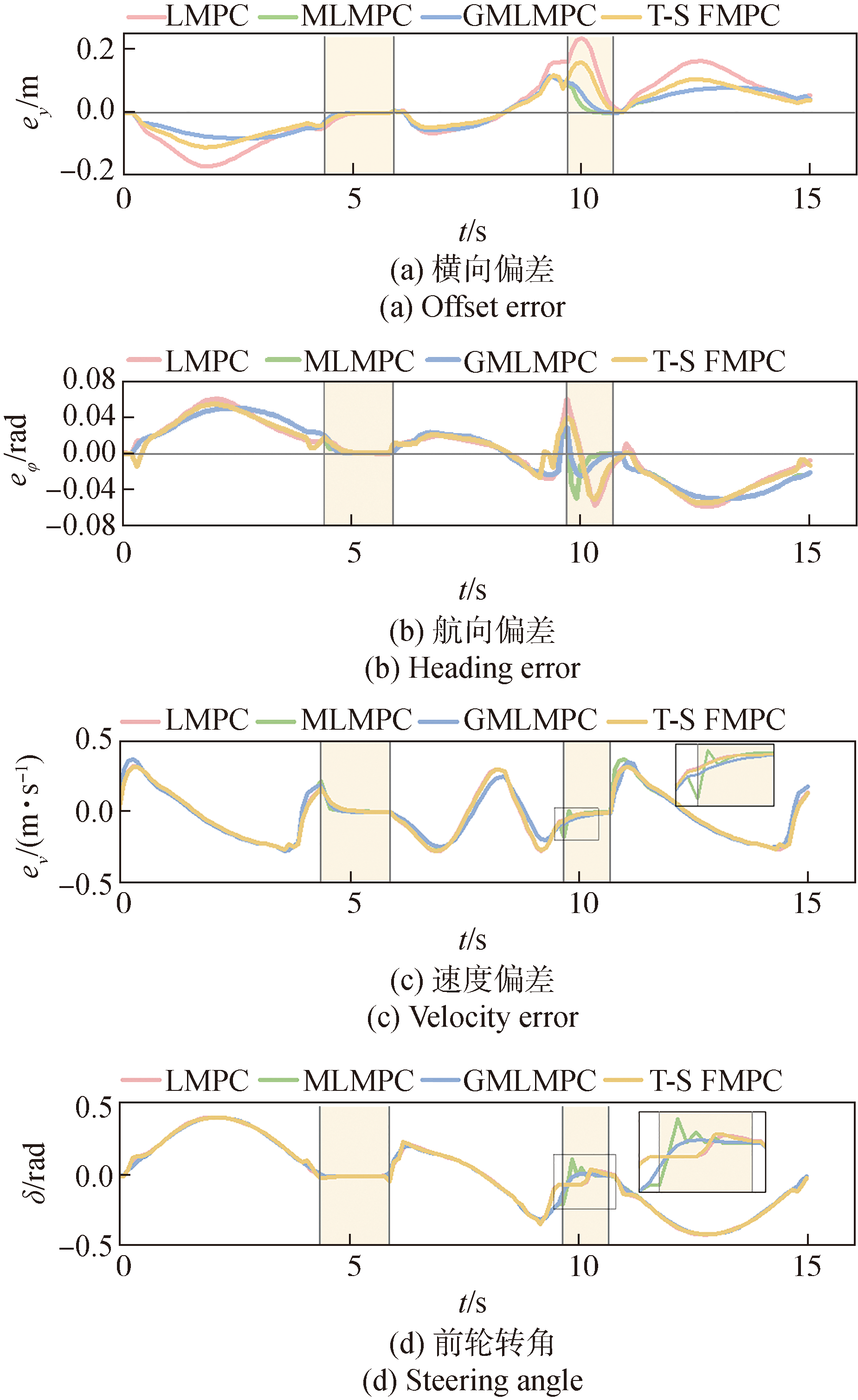
图11 低速S形弯轨迹仿真实验结果
Fig.11 Experimental results of low-speed S-turn
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.081(72.3%) | 0.025(13.6%) | 0.14(16.7%) |
| MLMPC | 0.047 | 0.022 | 0.12 |
| T-S FMPC | 0.055(17.1%) | 0.023(4.5%) | 0.14(16.7%) |
| GMLMPC | 0.047 | 0.022 | 0.12 |
表5 低速S形弯轨迹仿真实验数据
Table 5 Experimental data of low-speed S-turn
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.081(72.3%) | 0.025(13.6%) | 0.14(16.7%) |
| MLMPC | 0.047 | 0.022 | 0.12 |
| T-S FMPC | 0.055(17.1%) | 0.023(4.5%) | 0.14(16.7%) |
| GMLMPC | 0.047 | 0.022 | 0.12 |
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.041(-16.3%) | 0.0009(40.6%) |
| MLMPC | 0.068(38.7%) | 0.0022(243.7%) |
| T-S FMPC | 0.053(8.1%) | 0.00091(42,2%) |
| GMLMPC | 0.049 | 0.00064 |
表6 低速S形弯稳定性指标
Table 6 Low-speed S-turn stability index
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.041(-16.3%) | 0.0009(40.6%) |
| MLMPC | 0.068(38.7%) | 0.0022(243.7%) |
| T-S FMPC | 0.053(8.1%) | 0.00091(42,2%) |
| GMLMPC | 0.049 | 0.00064 |
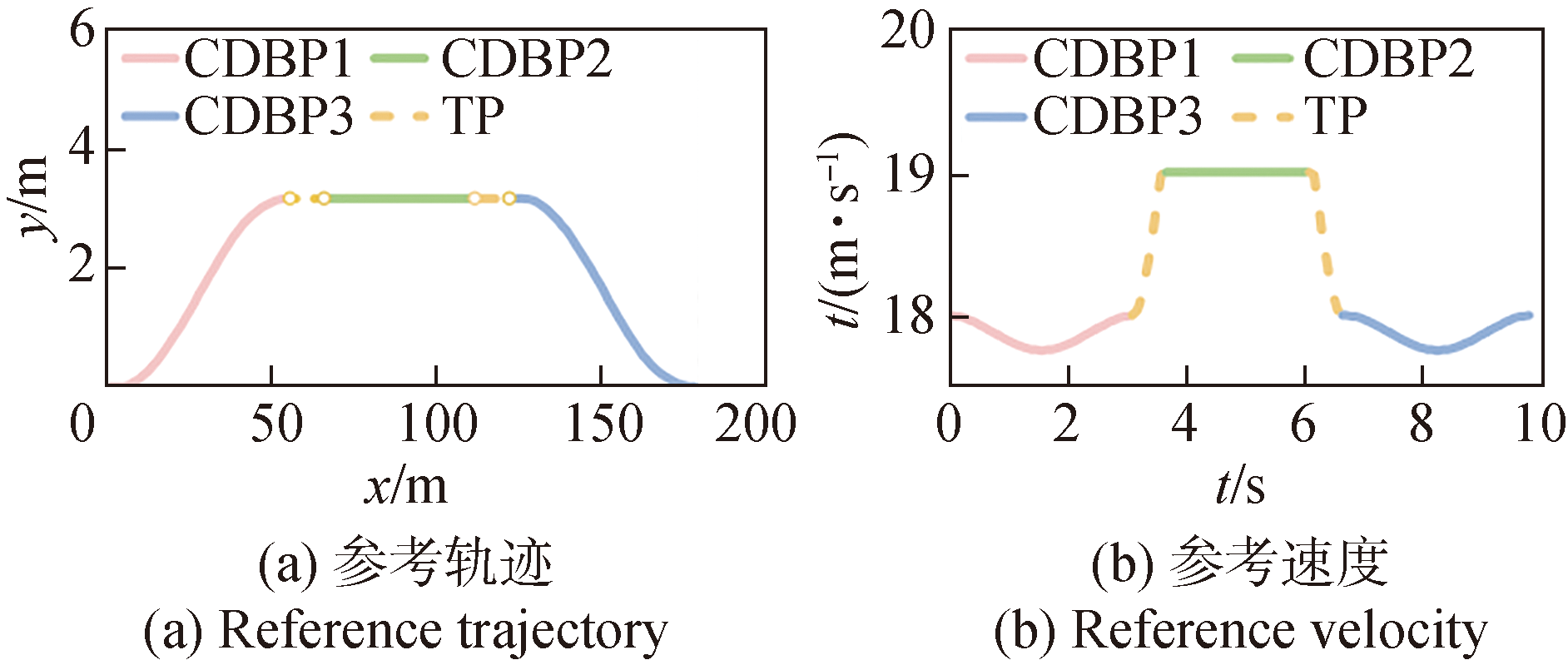
图12 双移线参考轨迹及参考速度
Fig.12 Reference trajectory and velocity of double-lane-change
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| 单移线基元 | 5 | 102 | 652 | 308 | 980 |
| 直线基元 | 8 | 578 | 513 | 312 | 732 |
表7 双移线MLP模型预测最优控制器参数
Table 7 MLP online prediction of optimal controller parameters
| 基元 | Np | qxy | qφ | qv | r |
|---|---|---|---|---|---|
| 单移线基元 | 5 | 102 | 652 | 308 | 980 |
| 直线基元 | 8 | 578 | 513 | 312 | 732 |

图13 高速双移线轨迹仿真实验结果
Fig.13 Experimental results of high-speed double-lane-change
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.0074(29.8%) | 0.0014(16.7%) | 0.00026(4%) |
| MLMPC | 0.0057 | 0.0012 | 0.00025 |
| T-S FMPC | 0.0066(15.8%) | 0.0014(16.7%) | 0.00026(4%) |
| GMLMPC | 0.0057 | 0.0012 | 0.00025 |
表8 高速双移线轨迹仿真实验数据
Table 8 Experimental data of high-speed double-lane-change
| 算法 | ey/m | eφ/rad | ev/(m·s-1) |
|---|---|---|---|
| LMPC | 0.0074(29.8%) | 0.0014(16.7%) | 0.00026(4%) |
| MLMPC | 0.0057 | 0.0012 | 0.00025 |
| T-S FMPC | 0.0066(15.8%) | 0.0014(16.7%) | 0.00026(4%) |
| GMLMPC | 0.0057 | 0.0012 | 0.00025 |
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.0042(10.5%) | 0.000032(-3%) |
| MLMPC | 0.0065(71.1%) | 0.000035(6.1%) |
| T-S FMPC | 0.0046(21.1%) | 0.000034(3%) |
| GMLMPC | 0.0038 | 0.000033 |
表9 高速双移线稳定性指标
Table 9 High-speed double-lane-change stability index
| 算法 | ωTP/(rad·s-1) | |
|---|---|---|
| LMPC | 0.0042(10.5%) | 0.000032(-3%) |
| MLMPC | 0.0065(71.1%) | 0.000035(6.1%) |
| T-S FMPC | 0.0046(21.1%) | 0.000034(3%) |
| GMLMPC | 0.0038 | 0.000033 |
| [1] |
熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143.
doi: 10.3901/JME.2020.10.127 |
|
doi: 10.3901/JME.2020.10.127 |
|
| [2] |
高振海, 朱乃宣, 高菲, 等. 考虑驾驶员特性的自学习换道轨迹规划系统[J]. 汽车工程, 2020, 42(12):1710-1717.
doi: 10.19562/j.chinasae.qcgc.2020.12.014 |
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24):275-288.
doi: 10.3901/JME.2022.24.275 |
|
|
|
| [8] |
|
| [9] |
李韶华, 杨泽坤, 王雪玮. 基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J]. 机械工程学报, 2023, 59(4):199-212.
doi: 10.3901/JME.2023.04.199 |
|
|
|
| [10] |
|
| [11] |
马跃, 郭烈, 秦增科, 等. 考虑驾驶风格的路径跟踪控制方法[J]. 重庆理工大学学报(自然科学), 2022, 36(11):20-30.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
王博洋, 龚建伟, 张瑞增, 等. 基于真实驾驶数据的运动基元提取与再生成[J]. 机械工程学报, 2020, 56(16):155-165.
doi: 10.3901/JME.2020.16.155 |
|
doi: 10.3901/JME.2020.16.155 |
|
| [15] |
|
| [16] |
|
| [17] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4):960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [18] |
龚建伟. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2020.
|
|
|
|
| [19] |
臧勇, 蔡英凤, 孙晓强, 等. 基于可拓博弈的智能汽车轨迹跟踪协调控制方法研究[J]. 机械工程学报, 2022, 58(8):181-194.
doi: 10.3901/JME.2022.08.181 |
|
doi: 10.3901/JME.2022.08.181 |
|
| [20] |
|
| [1] | 秦涛涛, 季思源, 雷琳, 郑占锋. 基于PSO-RNN算法的多级感应线圈炮非参数建模与出口速度预测[J]. 兵工学报, 2025, 46(7): 240616-. |
| [2] | 张奉林, 董轶昊, 辛建社, 郭丽萍, 谷雪晨, 曲家琦. 基于粒子群的小型无人机低过载压缩空气发射参数选择和优化算法[J]. 兵工学报, 2025, 46(2): 240014-. |
| [3] | 侯鹏, 葛玉雪, 裴扬, 岳源, 艾俊强. 基于毁伤评估结果的无人机对地攻击任务分配方法[J]. 兵工学报, 2025, 46(2): 240212-. |
| [4] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [5] | 王东振, 张岳, 赵宇, 黄大庆. 基于RRT-Dubins的无人机航迹优化方法[J]. 兵工学报, 2024, 45(8): 2761-2773. |
| [6] | 刘芳, 李士伟, 卢熹, 郭策安. 基于PSO-CNN-XGBoost水下柱形装药峰值超压预测[J]. 兵工学报, 2024, 45(5): 1602-1612. |
| [7] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [8] | 杨静, 陆铭华, 郭力强, 马洁琼, 吴金平, 张会. 不确定环境下潜艇综合防御鱼雷的作战决策分析与优化方法[J]. 兵工学报, 2024, 45(2): 564-573. |
| [9] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [10] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [11] | 王磊, 徐超, 李淼, 赵慧武. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8): 2224-2232. |
| [12] | 范博洋, 赵高鹏, 薄煜明, 吴祥. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575. |
| [13] | 陈美杉, 刘赢, 曾维贵, 钱坤. 空射诱饵弹干扰资源动态分配策略[J]. 兵工学报, 2023, 44(5): 1443-1455. |
| [14] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [15] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4