
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (1): 166-183.doi: 10.12382/bgxb.2023.0533
刘江涛1,2, 周乐来1,2,*( ), 李贻斌1,2
), 李贻斌1,2
收稿日期:2023-05-29
上线日期:2024-01-30
通讯作者:
基金资助:
LIU Jiangtao1,2, ZHOU Lelai1,2,*(), LI Yibin1,2
Received:2023-05-29
Online:2024-01-30
摘要:
为研究六轮移动机器人在复杂地形的运动控制方法,针对六轮独立驱动与转向机器人复杂地形轨迹跟踪问题,提出一种预测控制和动态补偿的控制方法。基于非完整约束的线性六轮移动机器人运动学模型,以模型预测控制算法为基础,引入比例-积分-微分补偿控制器,抑制动态滞后引起的跟踪误差,设计速度与转向角动态反馈补偿,以应对地形扰动对轨迹跟踪的影响。分析机器人运动过程中障碍物的避碰问题,设计可求解避障轨迹的避障规划器,通过轨迹跟踪系统对局部避障轨迹进行跟踪控制,实现机器人的轨迹跟踪和自动避碰。对轨迹跟踪算法和避障算法进行仿真实验。实验结果表明:在典型工况下,机器人可完成凹形斜坡、凸形斜坡和凹凸地形正弦型轨迹跟踪控制和静态与动态障碍物避碰,验证了新方法的有效性。
中图分类号:
刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183.
LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain[J]. Acta Armamentarii, 2024, 45(1): 166-183.
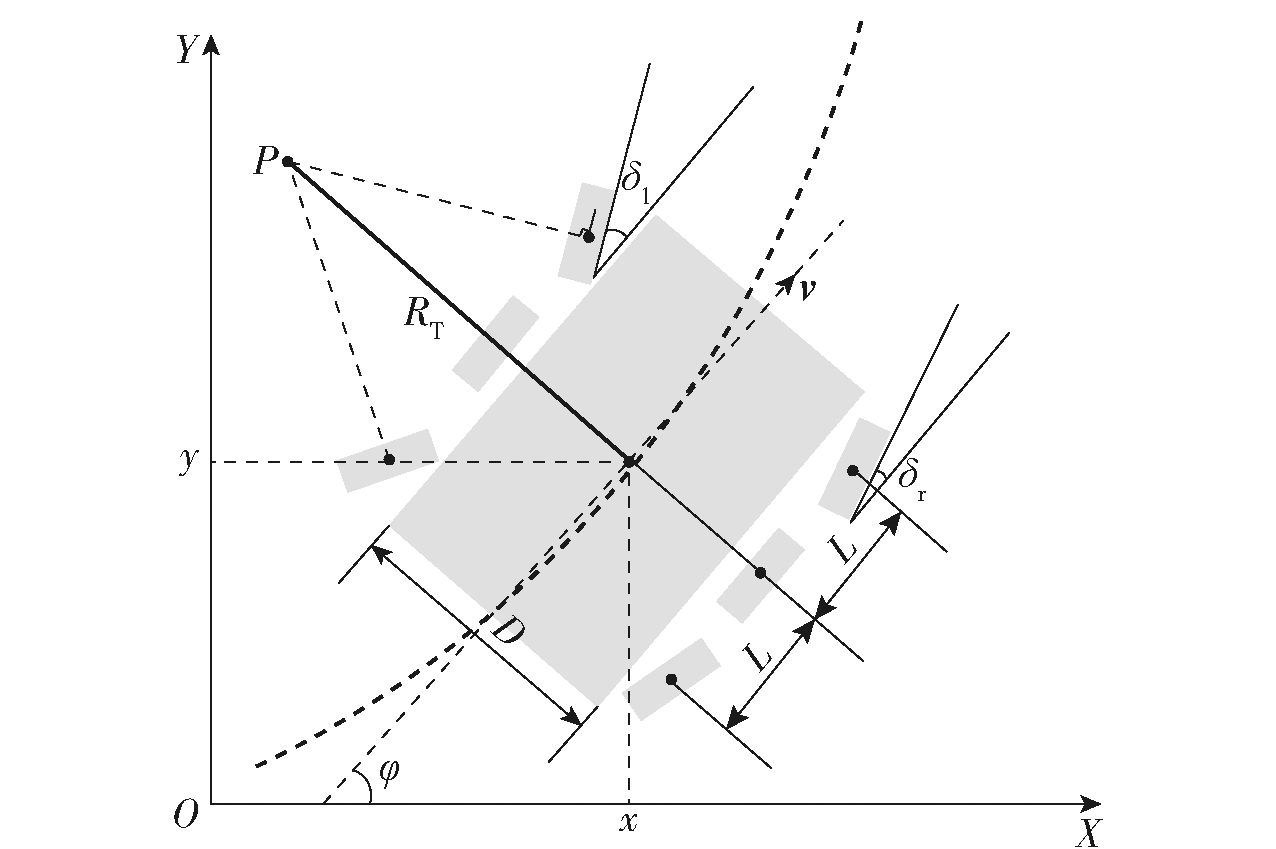
图1 非完整约束六轮独立驱动与转向机器人运动学模型
Fig.1 Kinematic model of non-complete constraint six-wheel independent drive independent steering robot
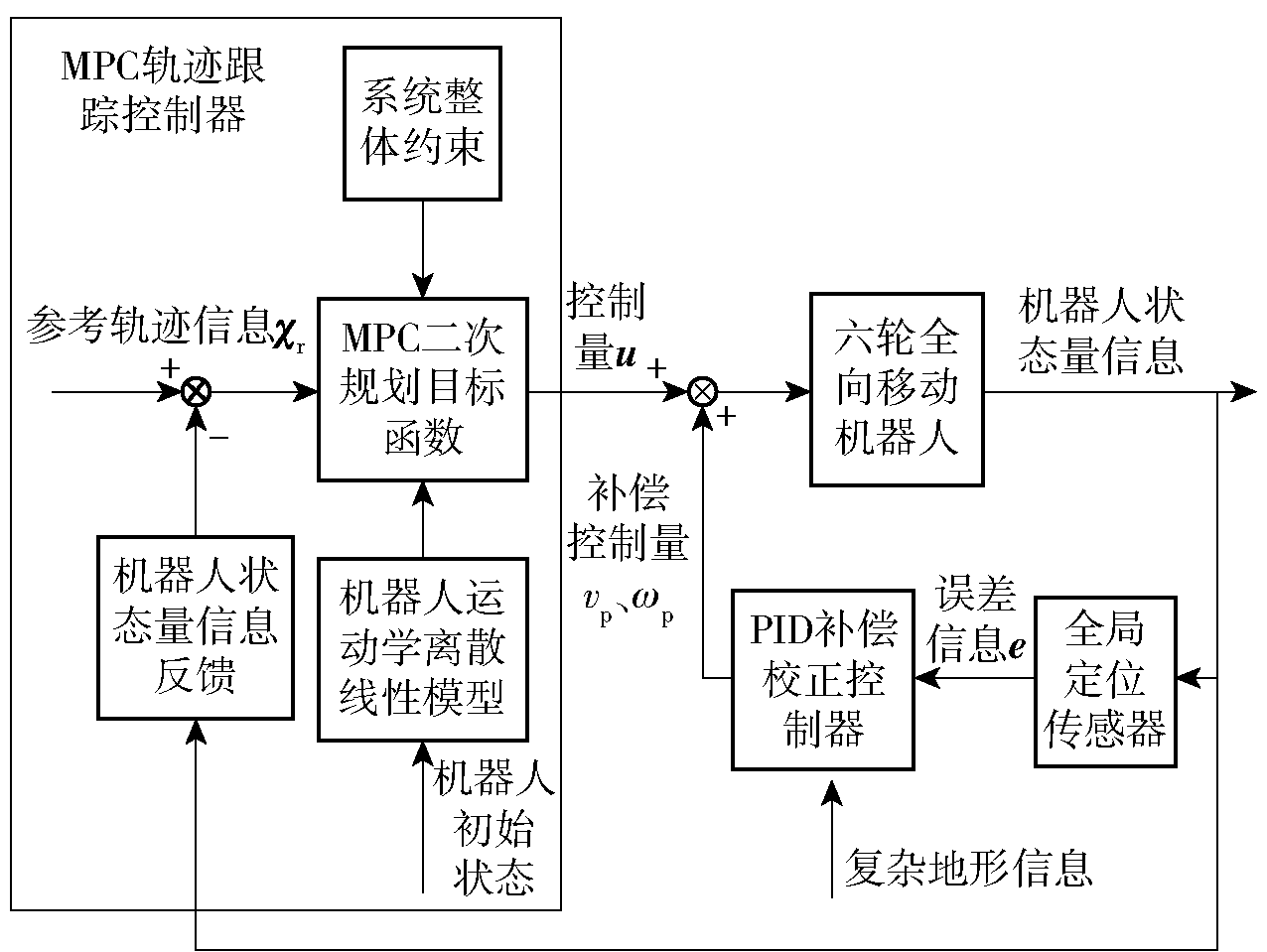
图2 复杂地形机器人轨迹跟踪控制框图
Fig.2 Block diagram of robot trajectory tracking control in complex terrain
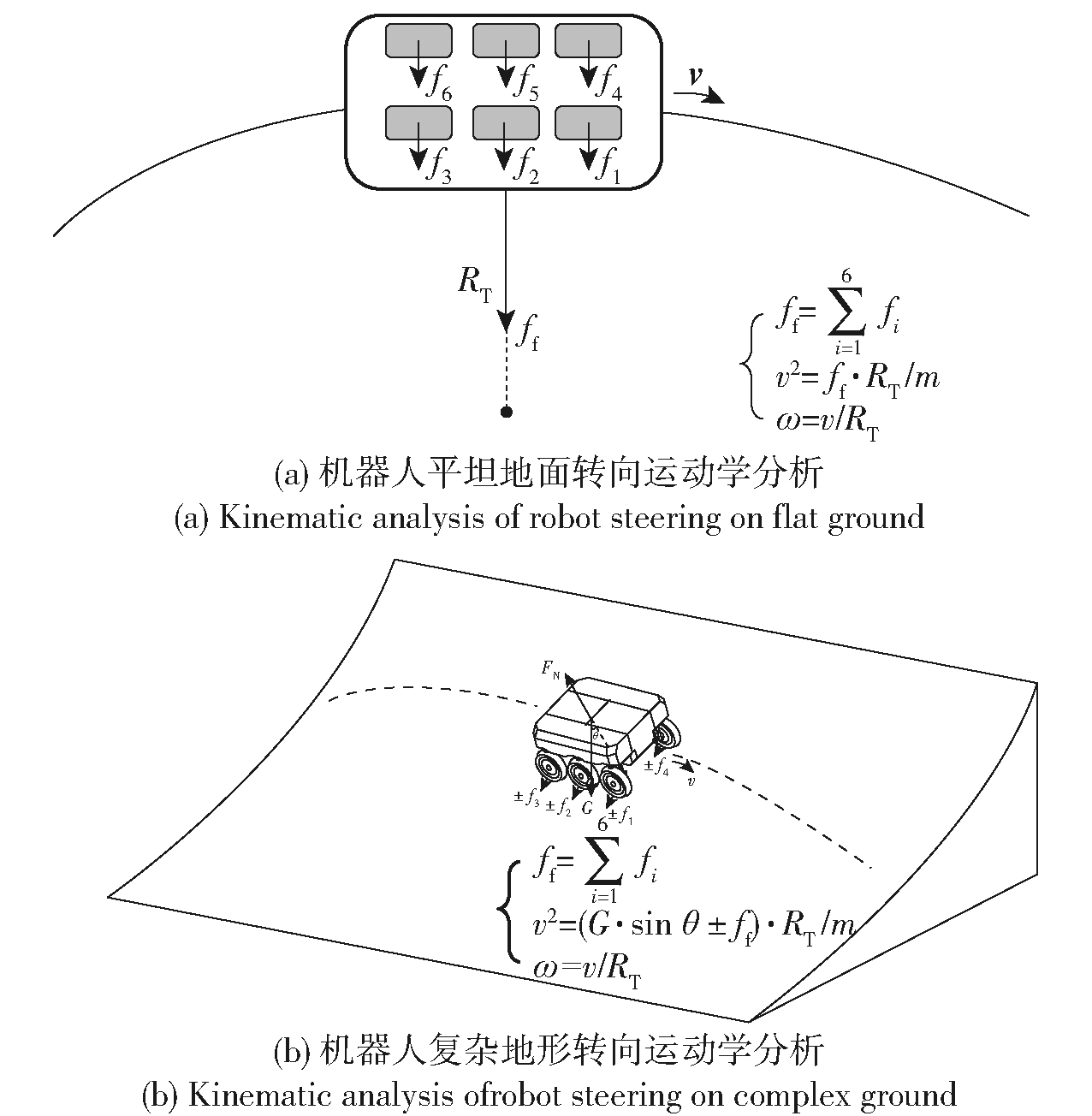
图3 不同地形环境机器人转向对比
Fig.3 Comparison of robot steerings in different terrain environments
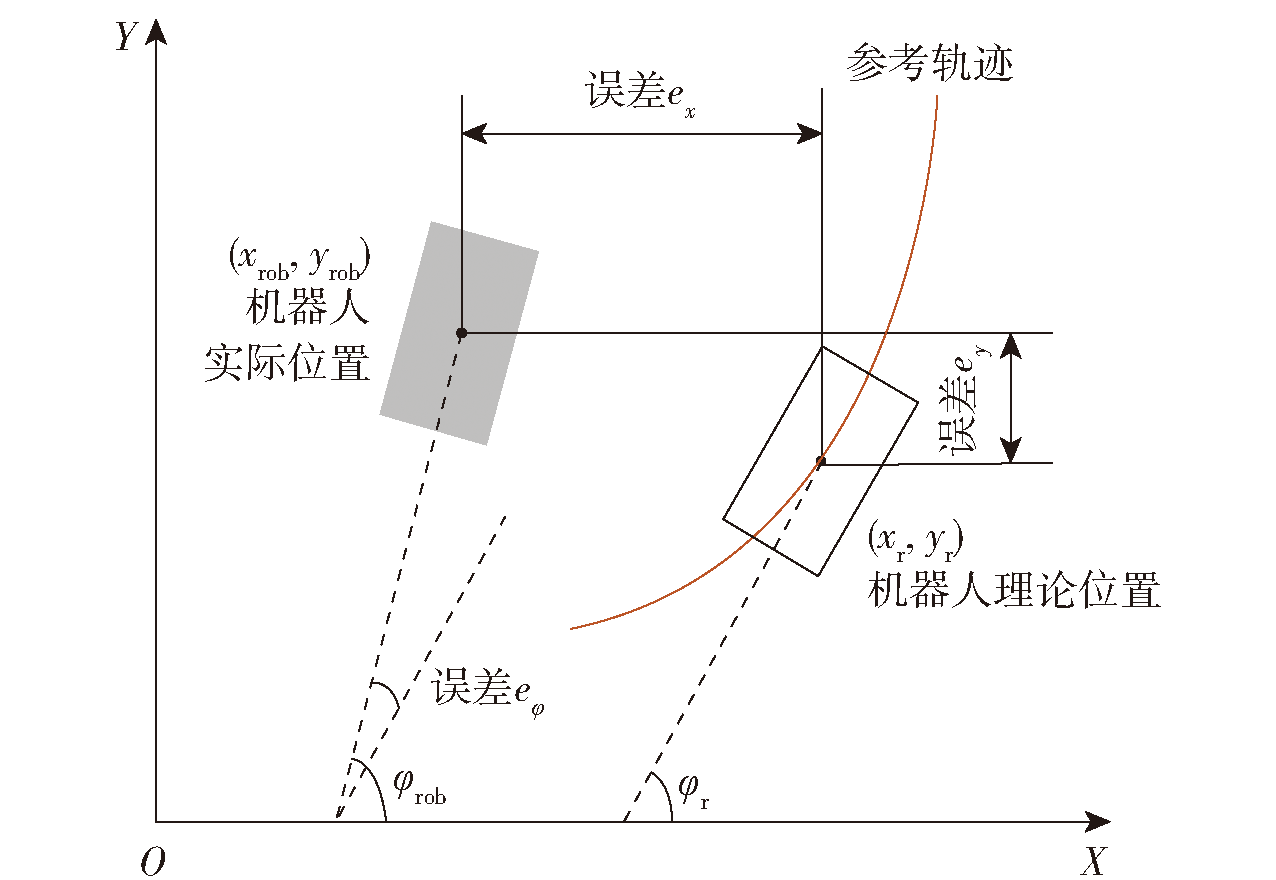
图4 机器人偏离参考轨迹
Fig.4 Deviation of robot from the reference trajectory
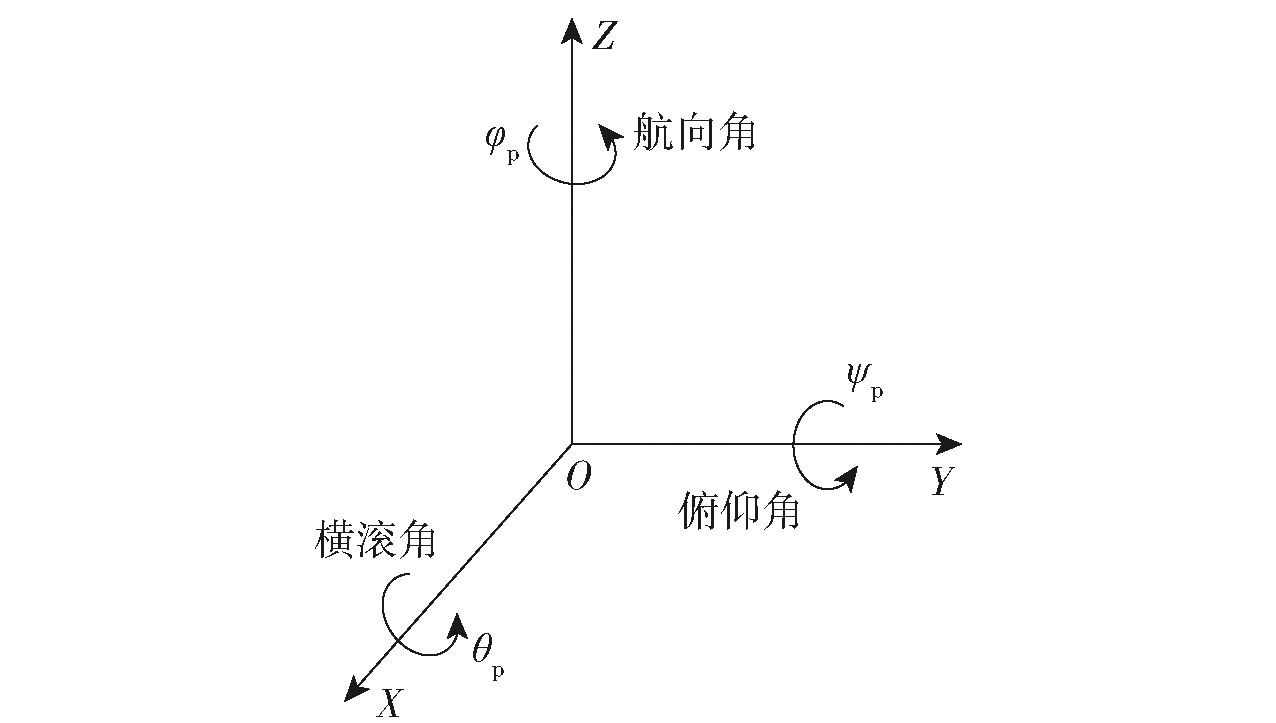
图5 三维坐标角度表示
Fig.5 Three-dimensional coordinate angle representation
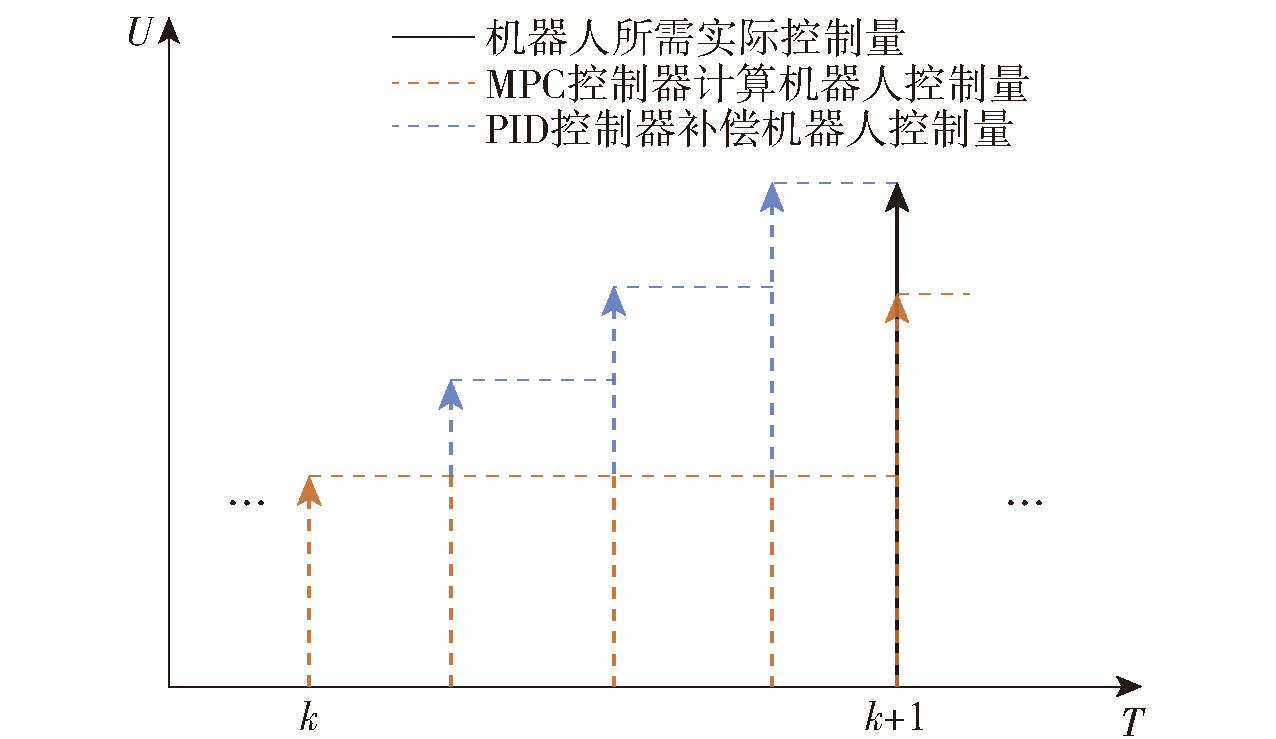
图6 PID补偿校正
Fig.6 PID compensation correction
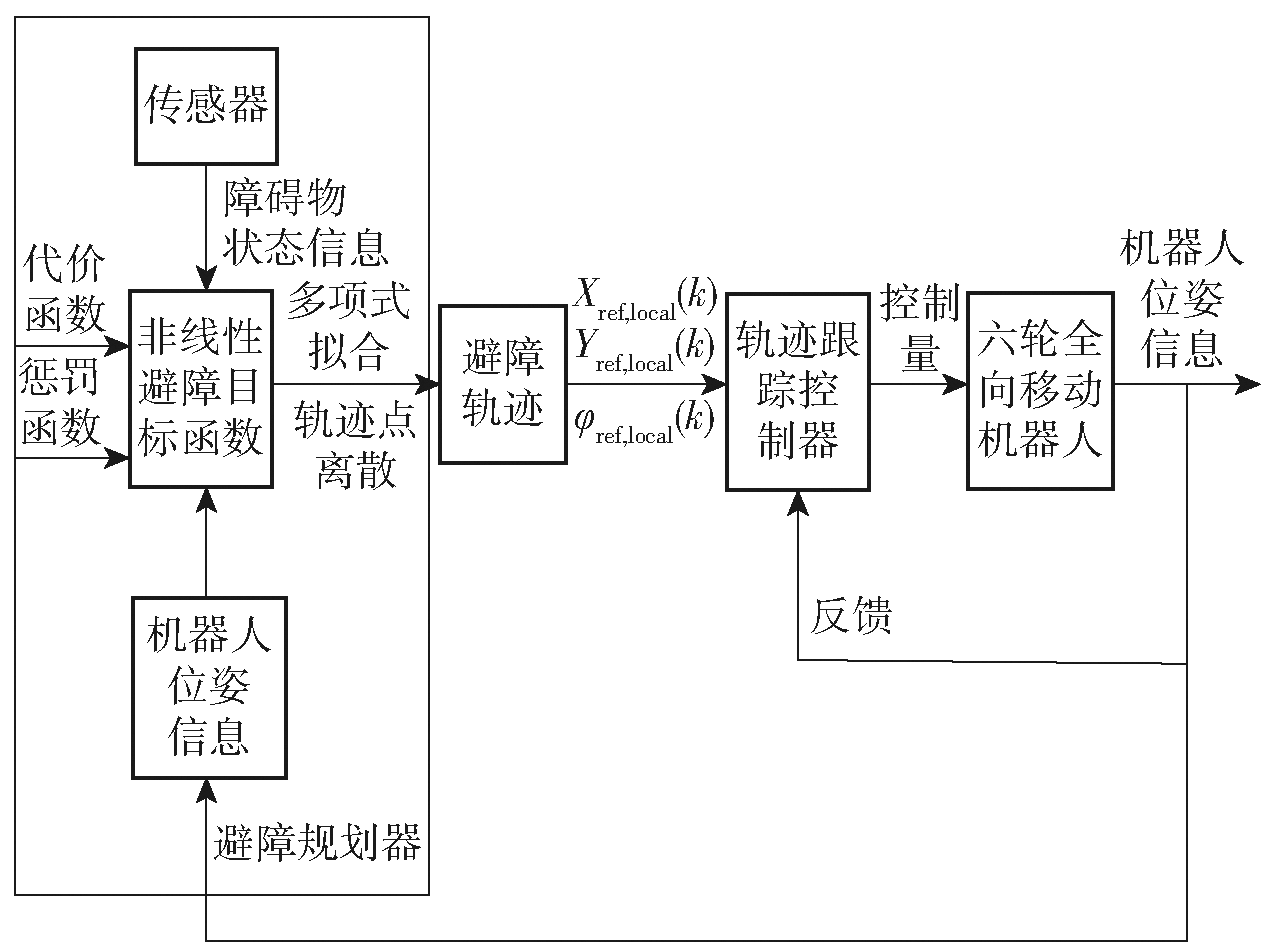
图7 结合避障控制的轨迹规划控制系统框图
Fig.7 Block diagram of trajectory planning control system combined with obstacle avoidance control
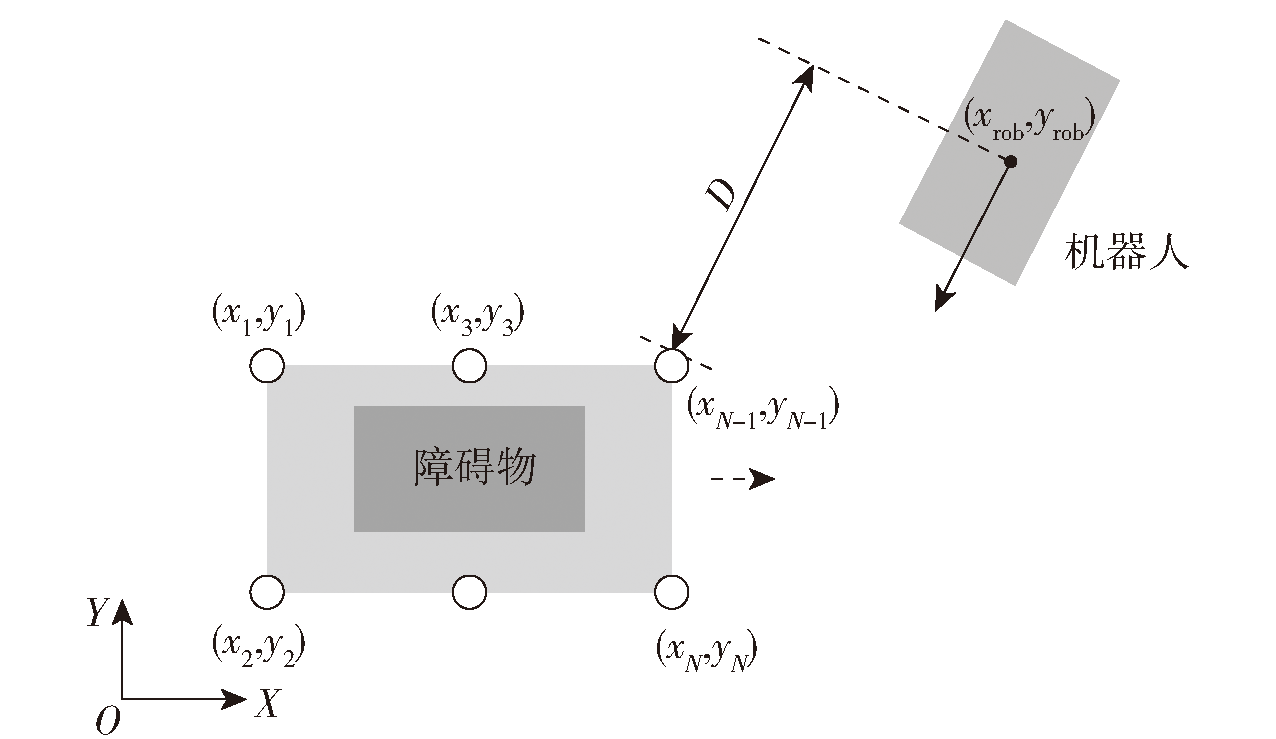
图8 障碍物膨胀与分割点
Fig.8 Obstacle expansion and splitting point

图9 避障惩罚函数
Fig.9 Obstacle avoidance penalty function
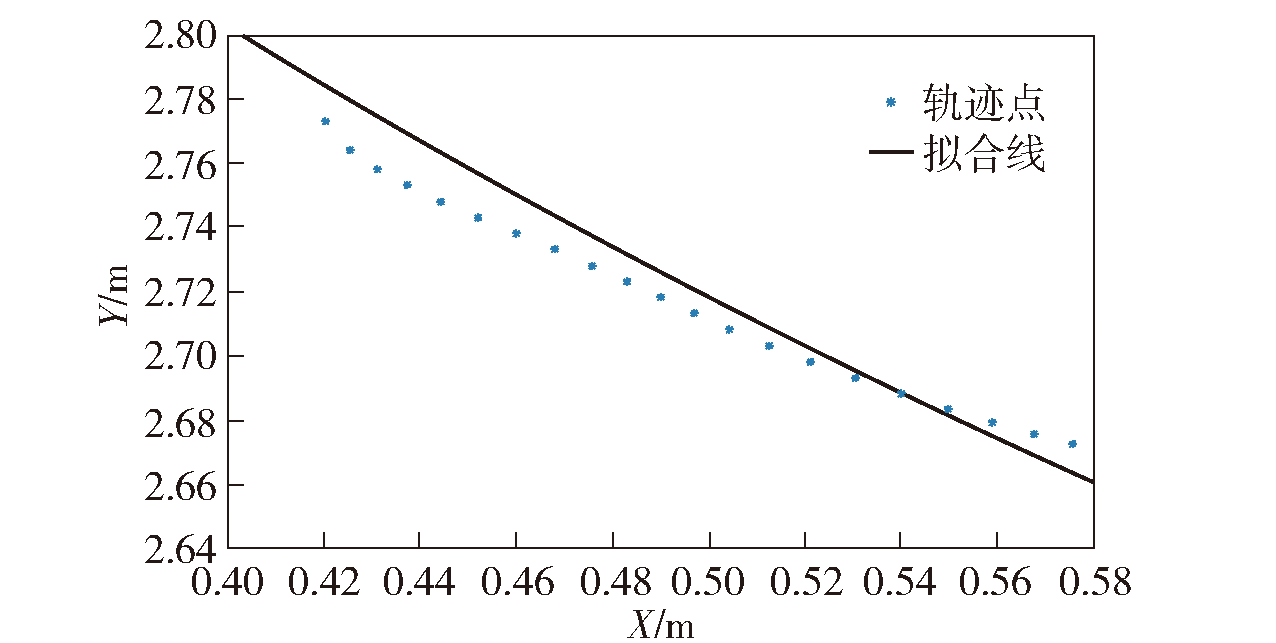
图10 部分段轨迹拟合结果
Fig.10 Fitting results of partial segment trajectory
| 参数 | 取值 |
|---|---|
| 机器人尺寸(长×宽×高)/mm | 700×500×550 |
| 机器人整机质量/kg | 212 |
| 轮胎尺寸/mm | 宽80,直径215 |
| 驱动电机最大扭矩/(N·m) | 500 |
| 转向电机最大扭矩/(N·m) | 500 |
表1 机器人参数
Table 1 Robot parameters
| 参数 | 取值 |
|---|---|
| 机器人尺寸(长×宽×高)/mm | 700×500×550 |
| 机器人整机质量/kg | 212 |
| 轮胎尺寸/mm | 宽80,直径215 |
| 驱动电机最大扭矩/(N·m) | 500 |
| 转向电机最大扭矩/(N·m) | 500 |

图11 仿真操作平台与机器人控制
Fig.11 Simulation of operating platform and robot control
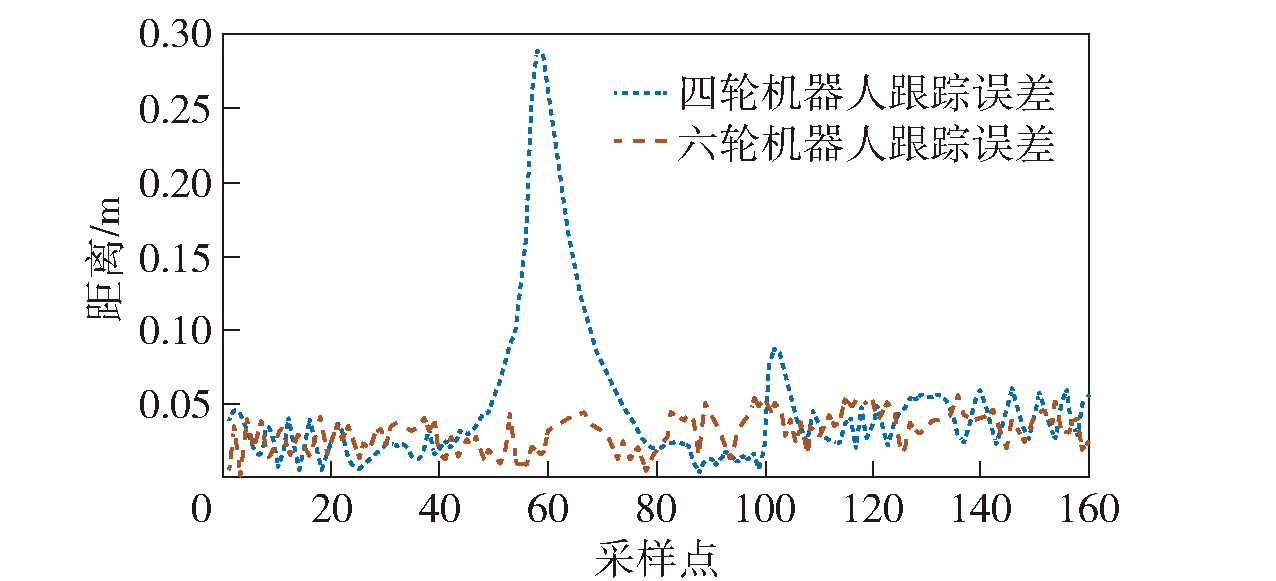
图12 四轮机器人与六轮机器人轨迹跟踪误差对比
Fig.12 Comparison of trajectory tracking errors of four-wheeled robot and six-wheeled robot

图13 机器人运动凹形斜坡坐标表示
Fig.13 Concave slope coordinates during robot motion
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.25 | |
| PID常数项比例系数 | kp:0.25, ki:0.05, kd:0.10 | |
| PID增益项比例系数 | λ1:5, λ2:1.5, λ3:2 |
表2 凹形斜坡实验参数
Table 2 Concave slope experimental parameters
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.25 | |
| PID常数项比例系数 | kp:0.25, ki:0.05, kd:0.10 | |
| PID增益项比例系数 | λ1:5, λ2:1.5, λ3:2 |

图14 凹形斜坡轨迹跟踪仿真
Fig.14 Trajectory tracking simulation on concave slope
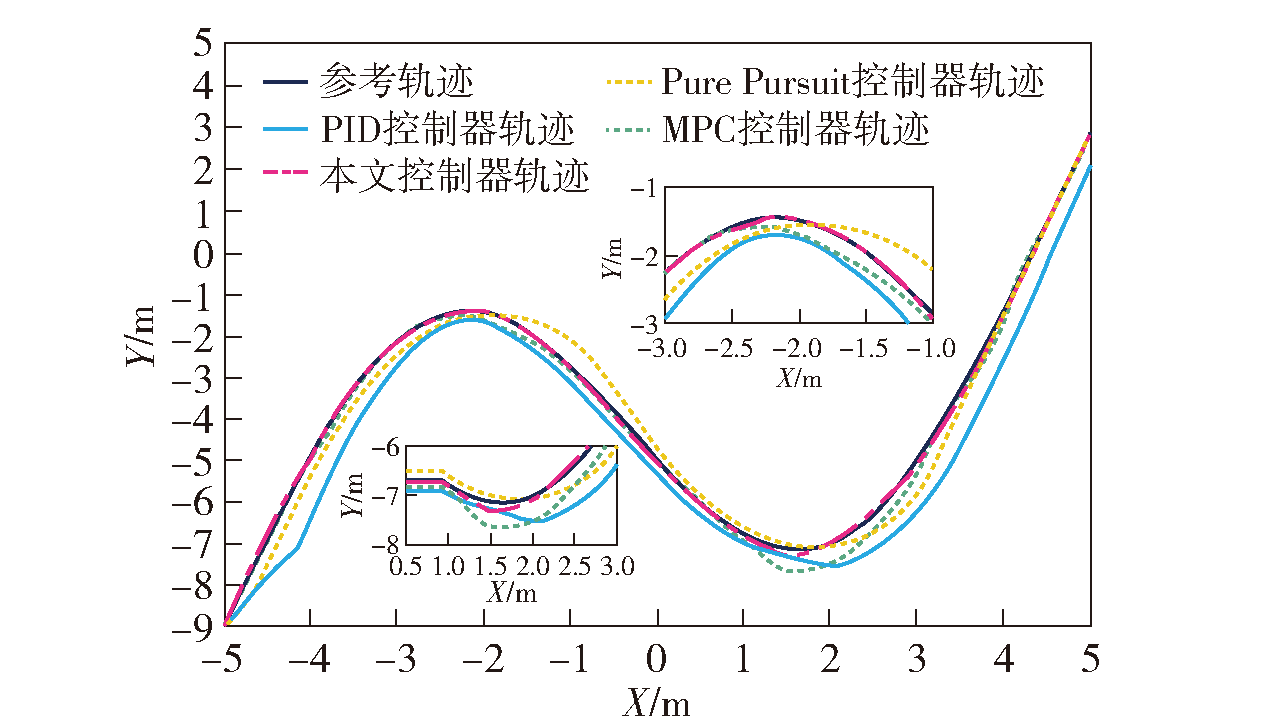
图15 凹形斜坡控制器跟踪轨迹对比
Fig.15 Comparison of tracking trajectories of concave ramp controllers
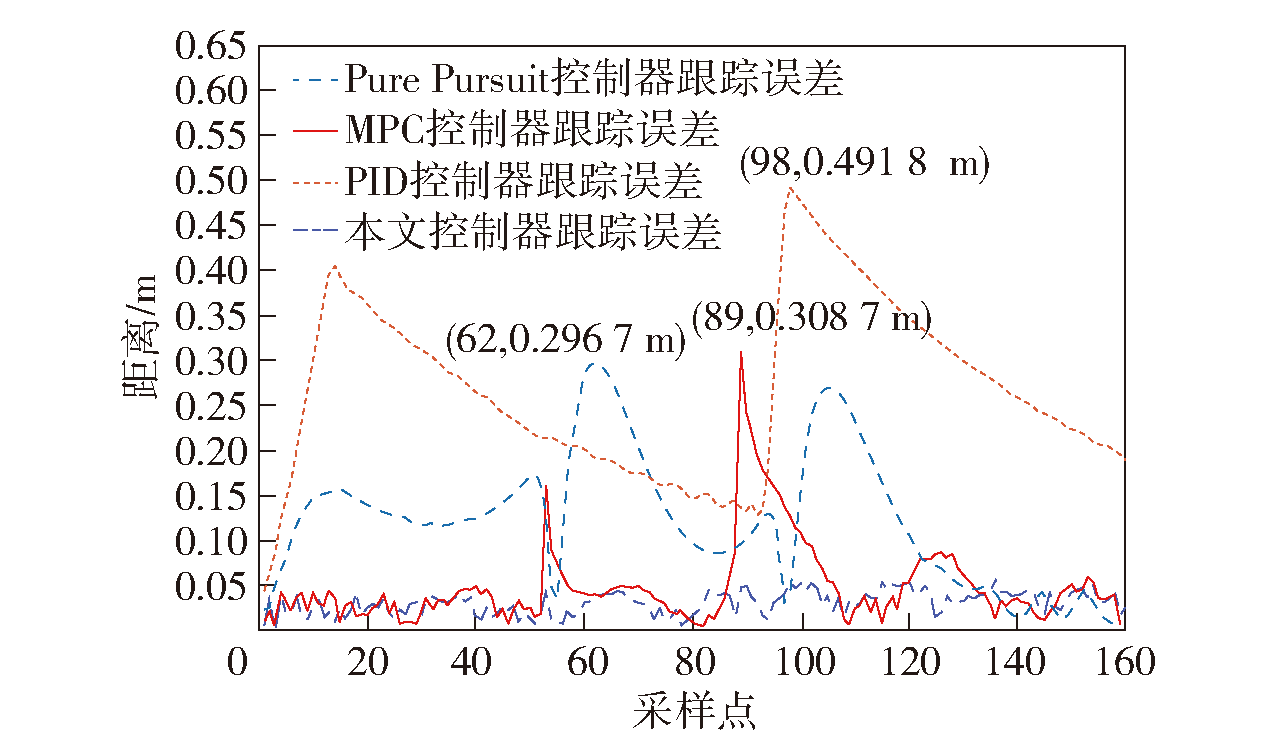
图16 凹形斜坡控制器跟踪误差对比
Fig.16 Comparison of tracking errors of concave ramp contrllers
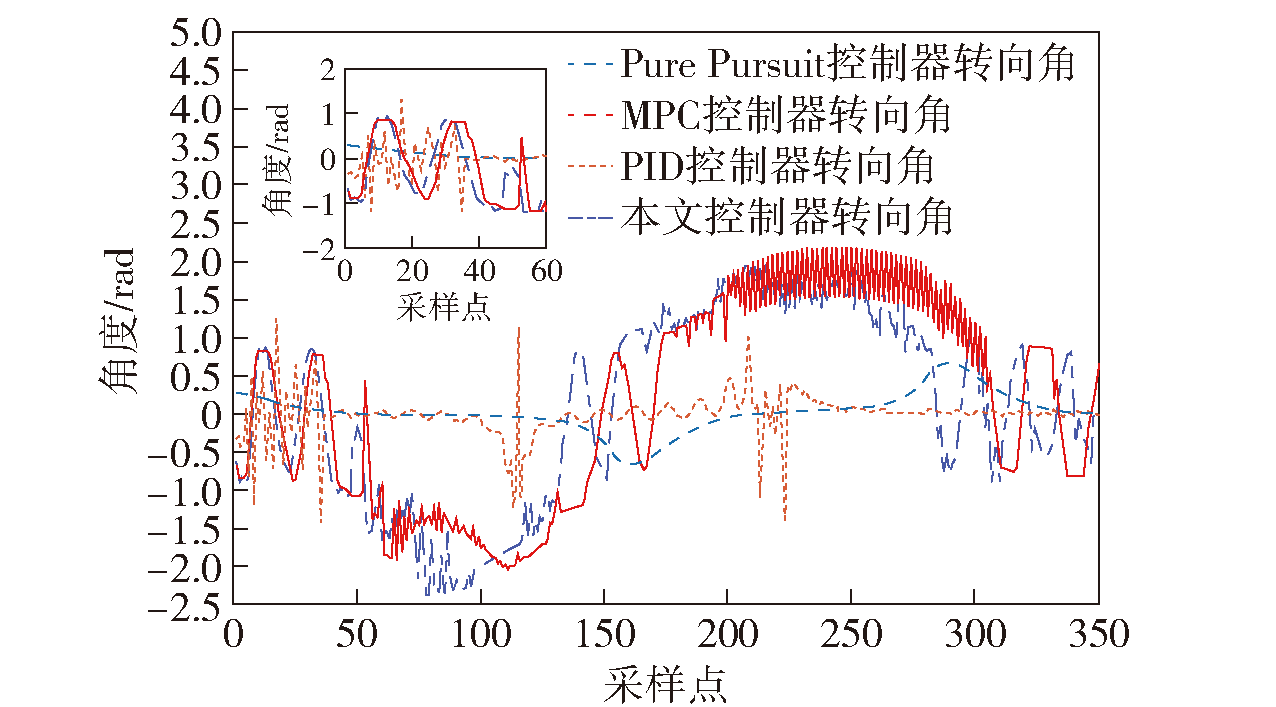
图17 凹形斜坡控制器转向角对比
Fig.17 Comparison of steering angles of concave slope controllers

图18 机器人运动凸形斜坡坐标表示
Fig.18 Convex slope coordinates duringrobot motion
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.35 | |
| PID常数项比例系数 | kp:0.30, ki:0.10, kd:0.15 | |
| PID增益项比例系数 | λ1:5.5, λ2:1.5, λ3:2.5 |
表3 凸形斜坡实验参数
Table 3 Convex ramp experimental parameters
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.13~1.35 | |
| PID常数项比例系数 | kp:0.30, ki:0.10, kd:0.15 | |
| PID增益项比例系数 | λ1:5.5, λ2:1.5, λ3:2.5 |

图19 凸形斜坡轨迹跟踪仿真
Fig.19 Trajectory tracking simulation on convex slope
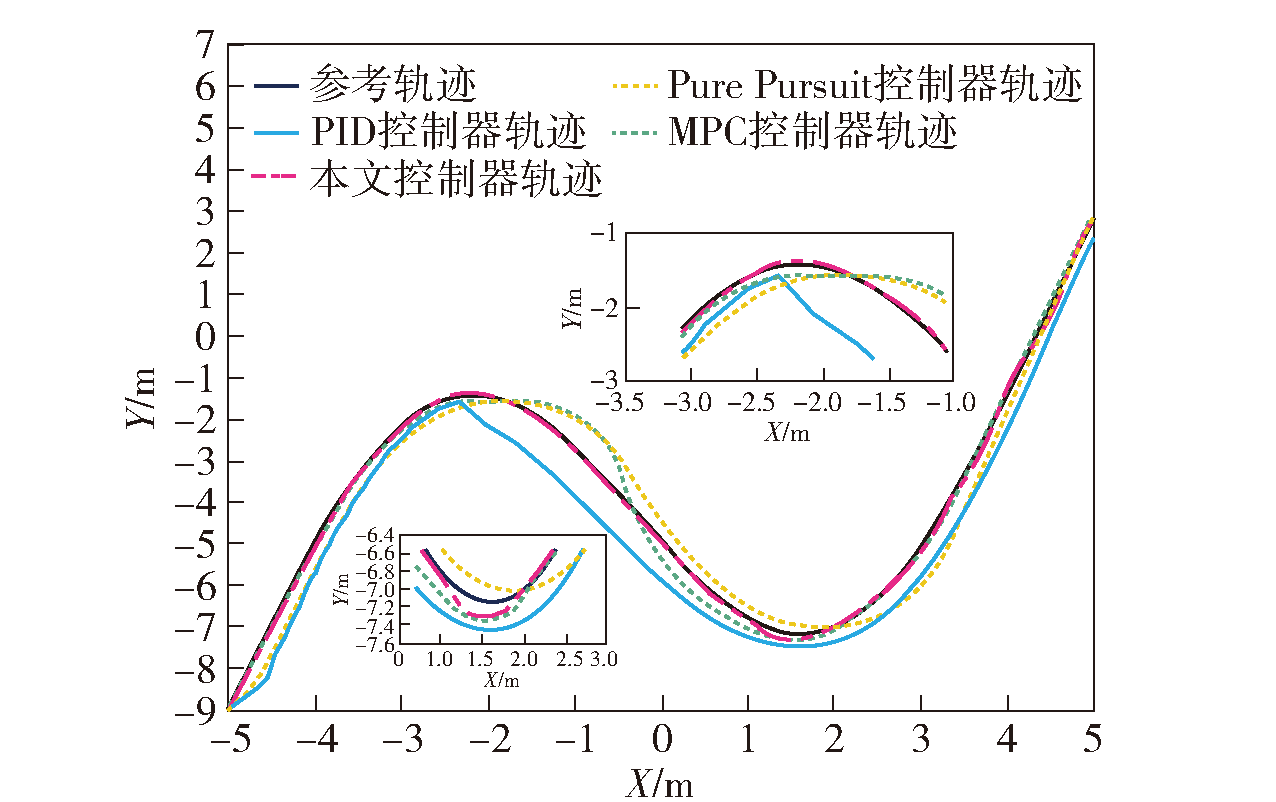
图20 凸形斜坡控制器跟踪轨迹对比
Fig.20 Comparison of tracking trajectories of convex ramp controllers

图21 凸形斜坡控制器跟踪误差对比
Fig.21 Comparison of tracking errors of convex ramp controllers
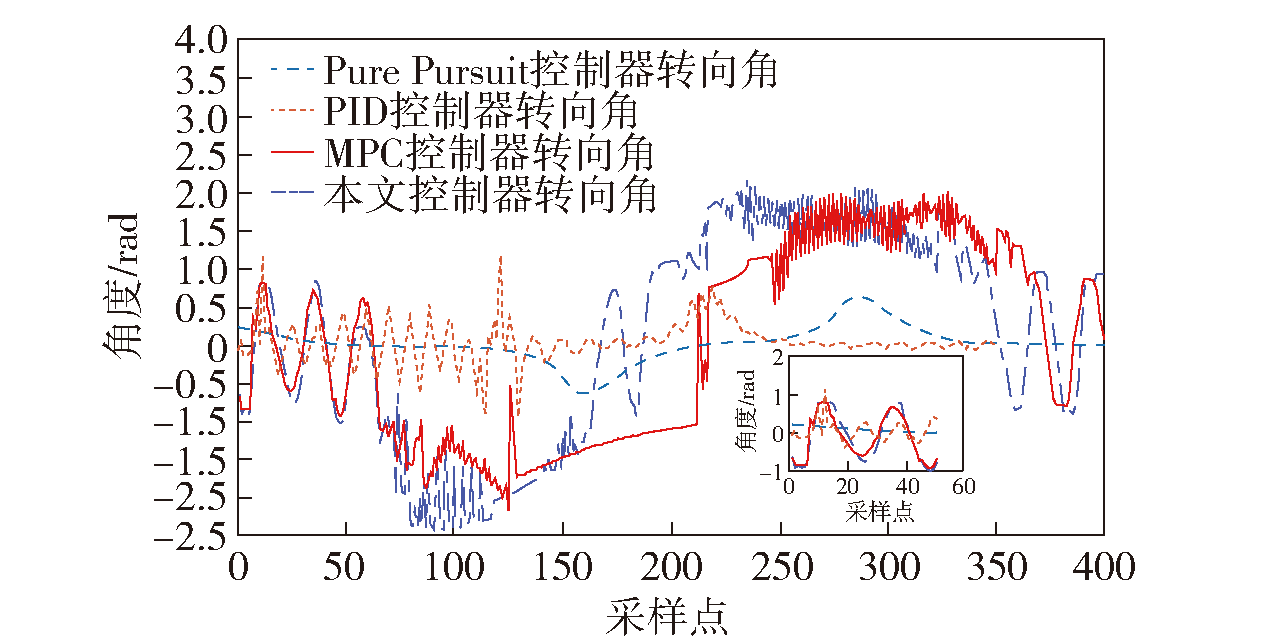
图22 凸形斜坡控制器转向角对比
Fig.22 Comparison of steering angles of convex ramp controllers
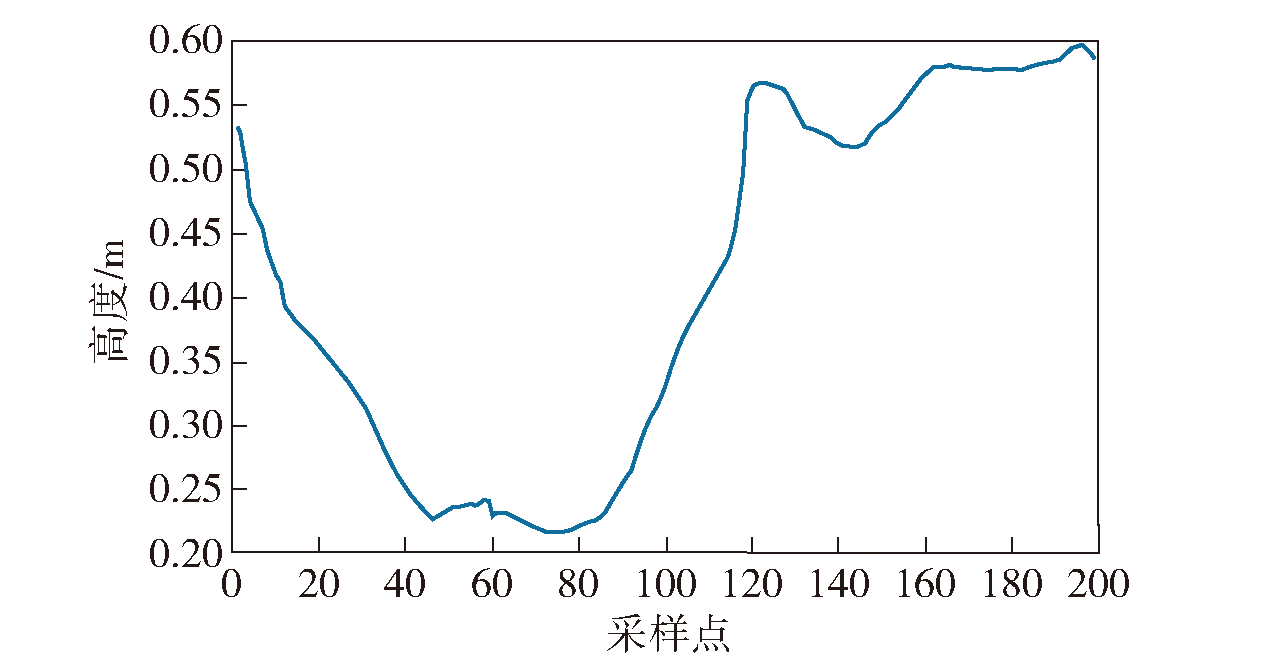
图23 轨迹跟踪过程机器人质心高度变化
Fig.23 The change in the height of robot’s center of mass during trajectory tracking
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.2~1.4 | |
| PID常数项比例系数 | kp:0.32, ki:0.13, kd:0.16 | |
| PID增益项比例系数 | λ1:5.8, λ2:1.6, λ3:2.8 |
表4 凹凸路面实验参数
Table 4 Experimental parameters of uneven and convex roads
| 控制器类型 | 参数 | 数值 |
|---|---|---|
| PID控制器 | 系数 | kp:110, ki:0.1, kd:0.30 |
| 采样时间/ms | 10 | |
| Pure Pursuit | 前视距离系数 | 0.15 |
| 控制器 | 前视距离/m | 1.2 |
| 采样时间/ms | 10 | |
| MPC采样周期/ms | 50 | |
| MPC控制器 | MPC控制步长 | 30 |
| MPC预测步长 | 60 | |
| MPC采样周期/ms | 50 | |
| MPC控制步长 | 30 | |
| MPC预测步长 | 60 | |
| 本文控制器 | PID采样周期/ms | 10 |
| Yaw角放大倍数 | 1.2~1.4 | |
| PID常数项比例系数 | kp:0.32, ki:0.13, kd:0.16 | |
| PID增益项比例系数 | λ1:5.8, λ2:1.6, λ3:2.8 |
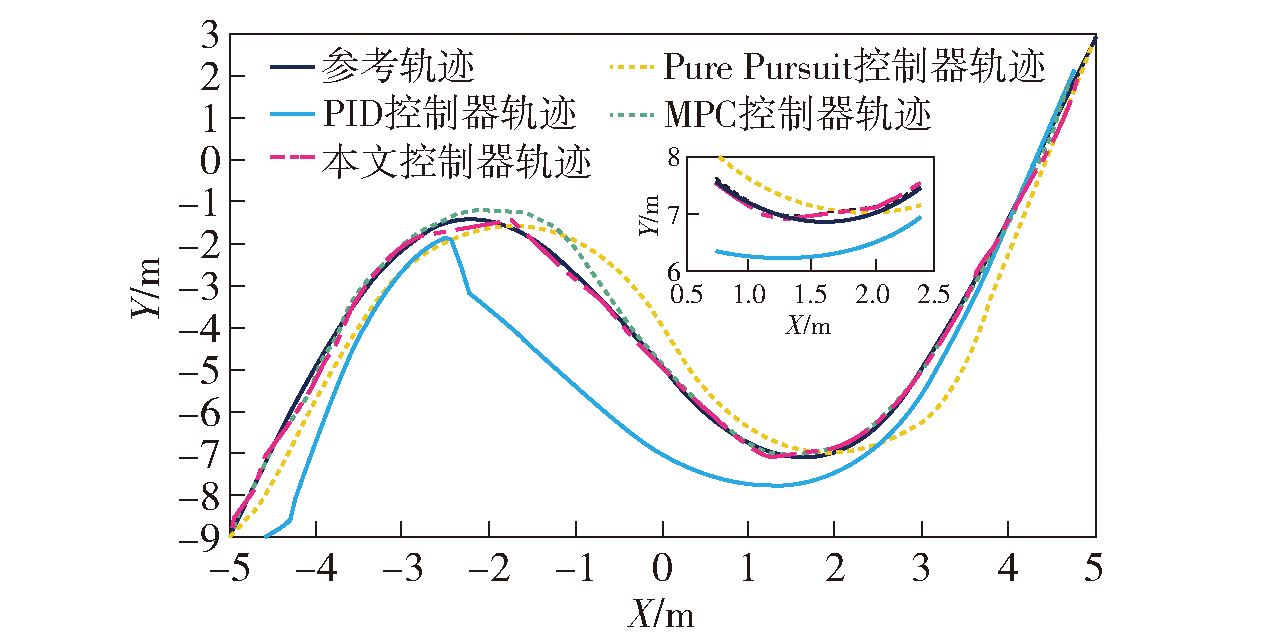
图24 凹凸路面控制器跟踪轨迹对比
Fig.24 Comparison of tracking trajectories of concave and convex pavement controllers
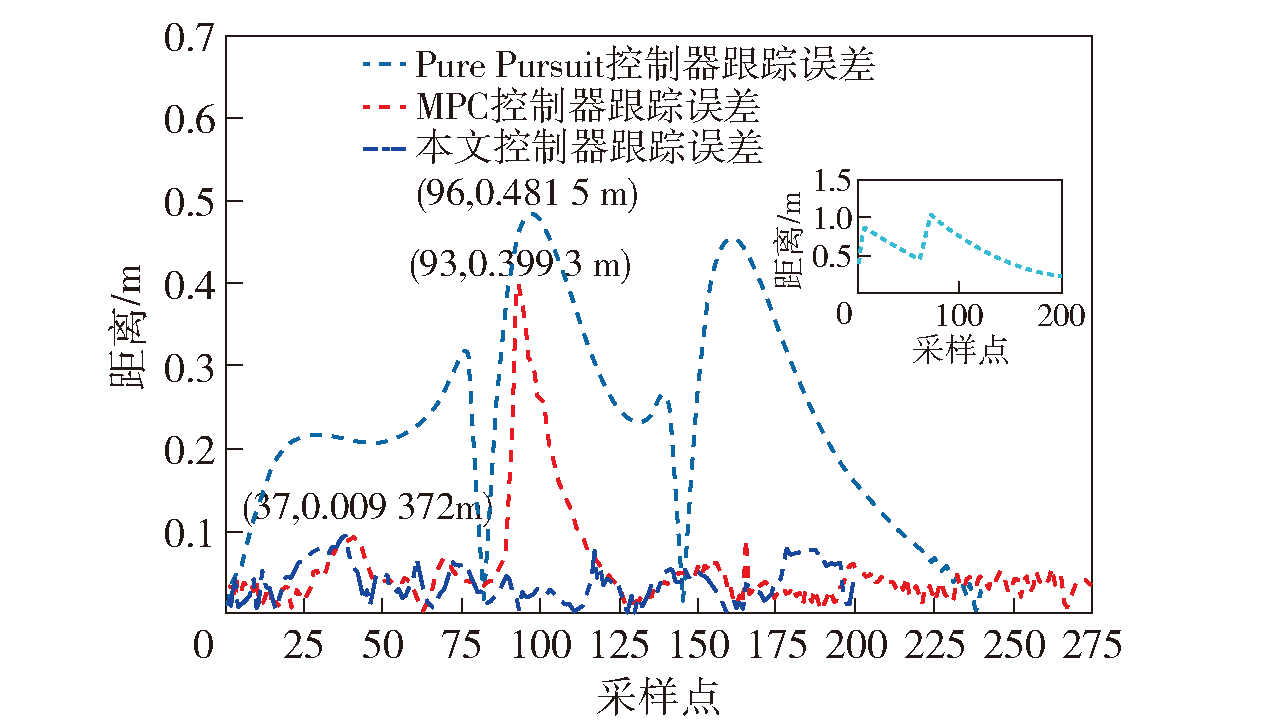
图25 凹凸路面控制器跟踪误差对比
Fig.25 Comparison of tracking errors of concave and convex pavement controllers
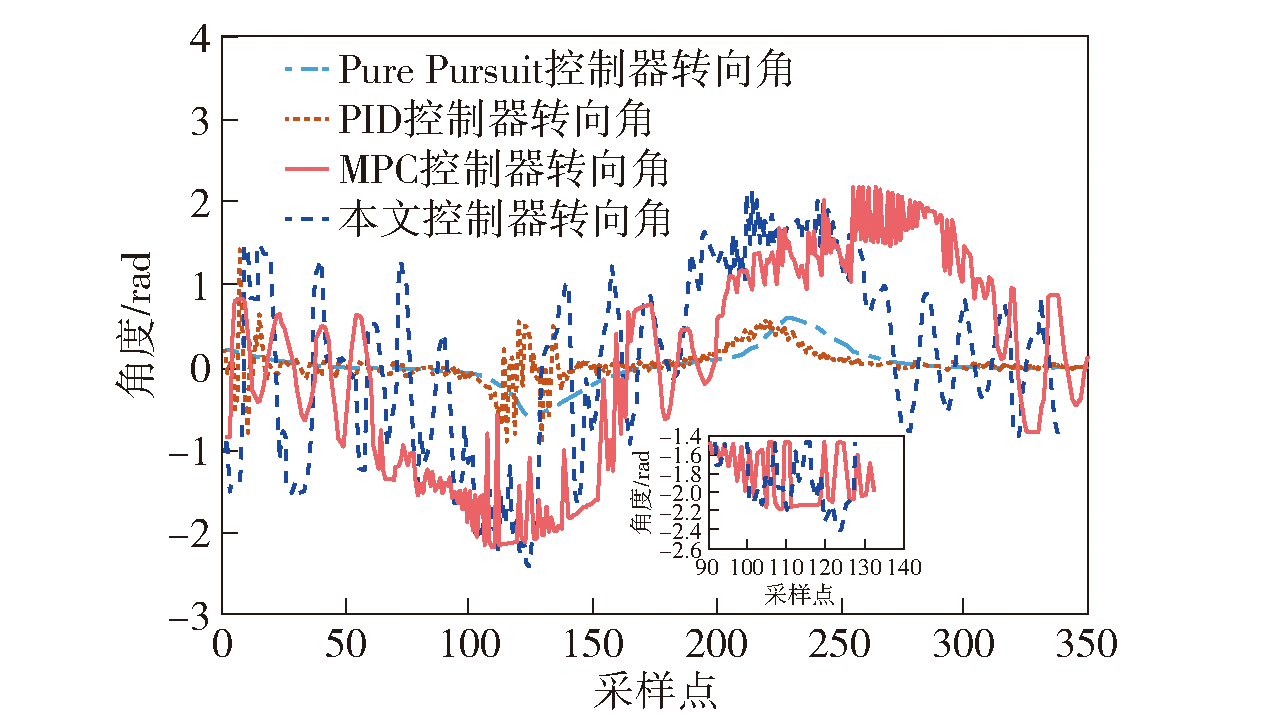
图26 凹凸路面控制器转向角对比
Fig.26 Comparison of steering angles of concave and convex road controllers
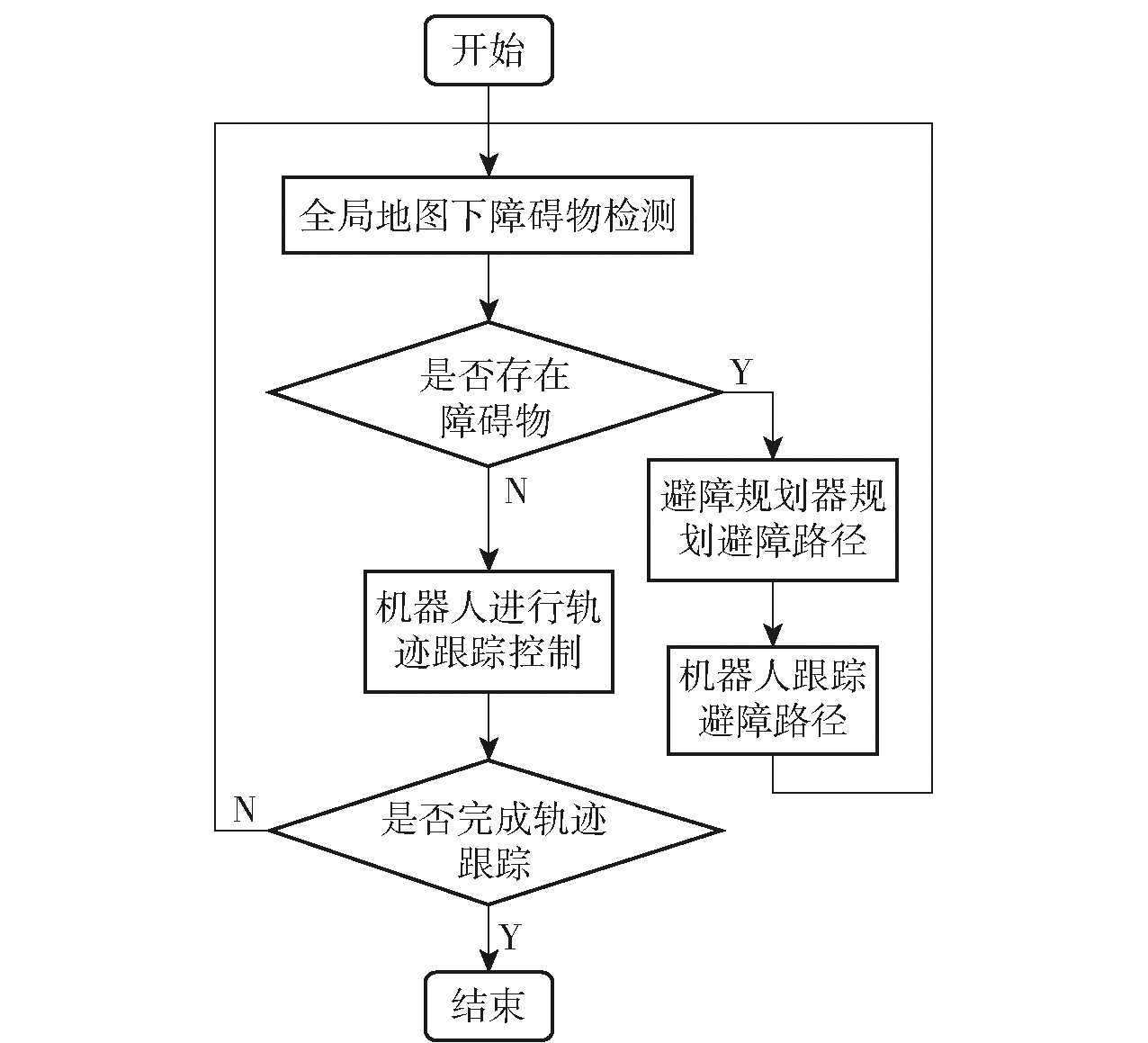
图27 机器人避障流程图
Fig.27 Flowchart of robot obstacle avoidance
| 参数 | 障碍物A | 障碍物B |
|---|---|---|
| 质心初始坐标/m | (0.8,3.2) | (5.4,3.2) |
| 长×宽×高/m | 0.3×0.3×0.5 | 0.3×0.3×0.5 |
| 质量/kg | 50 | 50 |
| 移动速度/(m·s-1) | 0 | 0.14~0.15 |
表5 障碍物信息
Table 5 Obstacle information
| 参数 | 障碍物A | 障碍物B |
|---|---|---|
| 质心初始坐标/m | (0.8,3.2) | (5.4,3.2) |
| 长×宽×高/m | 0.3×0.3×0.5 | 0.3×0.3×0.5 |
| 质量/kg | 50 | 50 |
| 移动速度/(m·s-1) | 0 | 0.14~0.15 |

图28 DWA避障方法与本文避障方法机器人避障轨迹对比
Fig.28 Comparison of obstacle avoidance trajectories of robot by using the dynamic window method and the obstacle avoidance method in the paper
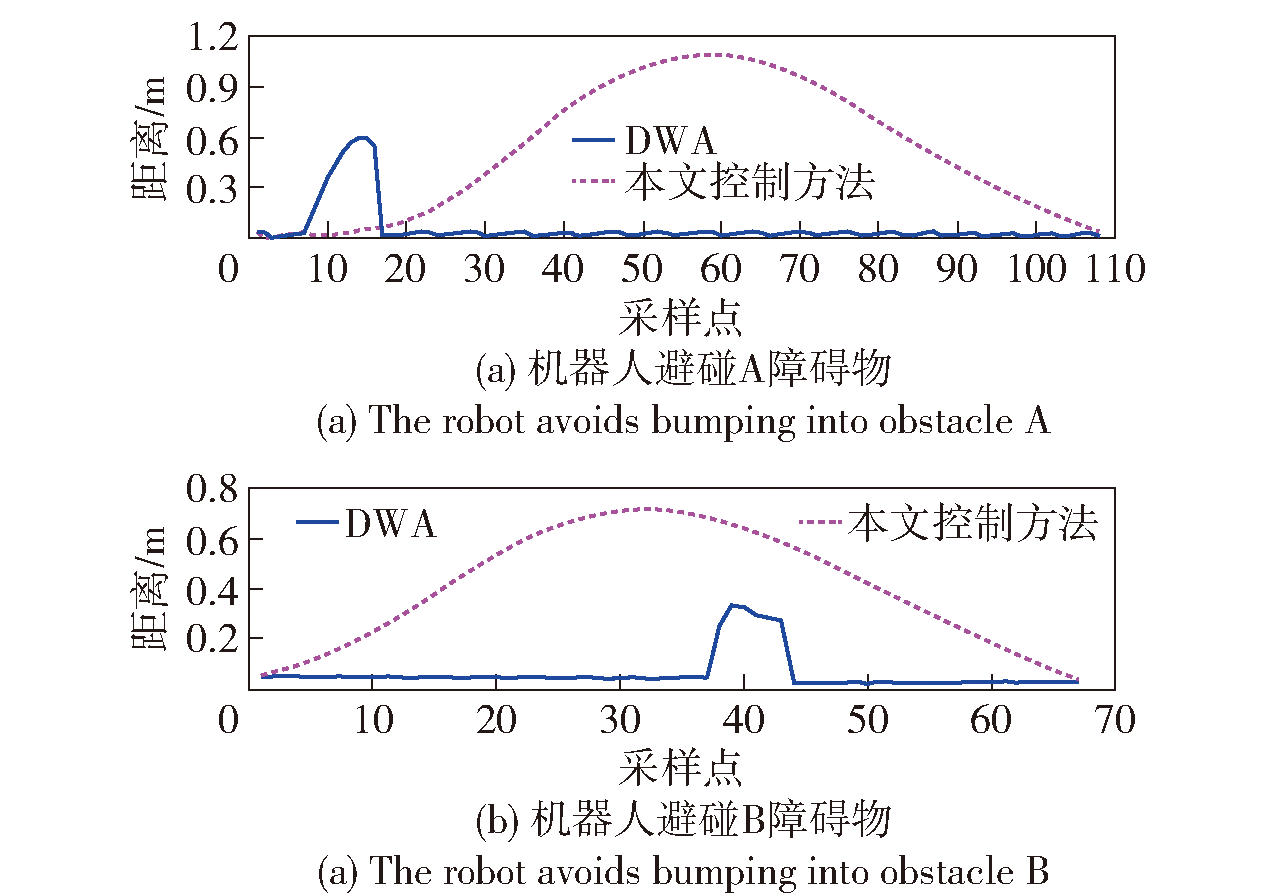
图29 DWA避障方法和本文避障方法机器人与参考轨迹距离偏差表示
Fig.29 Representation of distance deviation between the robot and the reference trajectories by the dynamic window method and the obstacle avoidance method in the paper
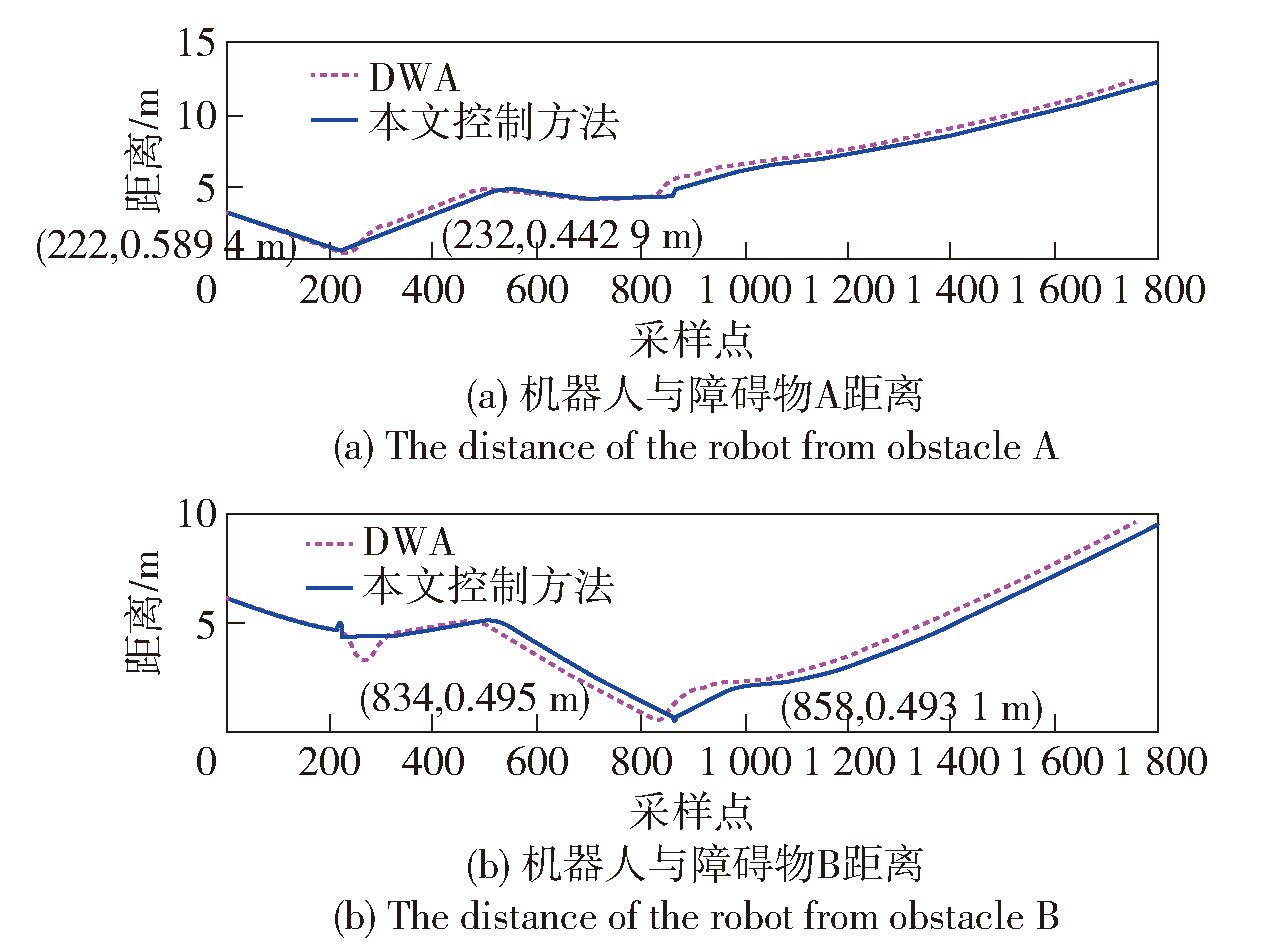
图30 DWA避障方法和本文避障方法机器人质心与障碍物质心距离表示
Fig.30 The distance between the robot’s center of mass and the center of the obstacle’s center of mass expressed by the dynamic window method and the obstacle avoidance method in the paper
| [1] |
doi: 10.1109/LSP.2016. URL |
| [2] |
doi: 10.1109/TVT.25 URL |
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1109/TIV.2020.3045837 URL |
| [8] |
doi: 10.1109/TVT.2022.3140240 URL |
| [9] |
doi: 10.1109/TSMC.6221021 URL |
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1109/TVT.2022.3152542 URL |
| [13] |
doi: 10.1109/LRA.2022.3161710 URL |
| [14] |
|
| [15] |
doi: 10.1109/TSMC.2019.2962732 URL |
| [16] |
doi: 10.1109/OJITS.2021.3137931 URL |
| [17] |
|
| [18] |
严浙平, 杨皓宇, 张伟, 等. 基于模型预测—中枢模式发生器的六足机器人轨迹跟踪控制[J]. 机器人, 2023, 45(1):58-69.
|
|
|
|
| [19] |
|
| [20] |
张超省, 王健, 张林, 等. 面向复杂障碍场的多智能体系统集群避障模型[J]. 兵工学报, 2021, 42(1):141-150.
|
|
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
| [21] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [22] |
杜广泽, 张旭东, 邹渊, 等. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105.
doi: 10.3969/j.issn.1000-1093.2020.10.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.10.020 |
|
| [23] |
张家闻, 房浩霖, 李家旺. 基于复杂约束条件的欠驱动AUV三维路径规划[J]. 兵工学报, 2022, 43(6): 1407-1414.
doi: 10.12382/bgxb.2021.0340 |
|
doi: 10.12382/bgxb.2021.0340 |
| [1] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [2] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [3] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [4] | 杜宏宝, 王正杰, 唐礼喜, 张小宁. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9): 2814-2823. |
| [5] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [6] | 张渊博, 项昌乐, 王伟达, 陈泳丹. 基于粒子群优化-蚁群融合算法的分布式电驱动车辆模型预测转矩协调控制策略[J]. 兵工学报, 2023, 44(11): 3253-3258. |
| [7] | 蒋岩, 丁语嫣, 张兴龙, 徐昕. 基于模型预测与策略学习的智能车辆人机协同控制算法[J]. 兵工学报, 2023, 44(11): 3465-3477. |
| [8] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [9] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [10] | 周球, 周悦, 孙洪鸣, 郭威, 吴凯, 兰彦军. 深海着陆车路径规划及跟踪控制方法[J]. 兵工学报, 2023, 44(1): 298-306. |
| [11] | 陈慧岩, 关海杰, 刘海鸥, 龚建伟, 吴贺禹. 履带平台无人驾驶系统基于语义信息的模块串联方法[J]. 兵工学报, 2022, 43(11): 2705-2716. |
| [12] | 陈路明, 廖自力, 马晓军, 刘春光. 基于分层控制的混合动力车辆实时能量管理策略[J]. 兵工学报, 2021, 42(8): 1580-1591. |
| [13] | 刘聪, 刘辉, 韩立金, 陈科. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10): 2102-2113. |
| [14] | 王志福, 白金, 黄康伦, 王军, 王阳, 梁常春, 王瑞. 基于模型预测控制的轮毂电机驱动车辆防侧翻控制[J]. 兵工学报, 2021, 42(1): 11-25. |
| [15] | 邓海鹏, 麻斌, 赵海光, 吕良, 刘宇. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4