
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (4): 960-971.doi: 10.12382/bgxb.2022.0009
卢佳兴, 刘海鸥*( ), 关海杰, 李德润, 陈慧岩, 刘龙龙
), 关海杰, 李德润, 陈慧岩, 刘龙龙
收稿日期:2022-01-01
上线日期:2023-04-28
通讯作者:
LU Jiaxing, LIU Haiou*(), GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong
Received:2022-01-01
Online:2023-04-28
摘要:
为解决定参数轨迹跟踪控制器工况适应性差的问题,基于改进粒子群优化(IPSO)、多层感知机(MLP)算法,设计一种双参数自适应优化的无人履带车辆轨迹跟踪控制算法。离线状态下,基于采集的实车数据,以轨迹跟踪的高精度、高稳定性、低时间成本为目标,利用IPSO算法构建了不同运动基元下的最优参数组合数据集,并以运动基元类型和车速等为特征向量,控制时域长度、时间步长为标签,采用学习率自适应优化算法完成MLP神经网络模型的训练。在线状态下,根据规划层下发的轨迹信息和车辆状态反馈信息,由MLP神经网络输出预测的最优控制时域长度和控制时间步长,作为双参数输入到模型预测控制算法中,完成自适应轨迹跟踪控制。基于ROS-VREP的联合仿真和基于双侧独立电驱动履带平台进行实车试验。研究结果表明,在包含大曲率转向的综合工况下,与相同计算时间成本的定参数轨迹跟踪控制算法相比,所设计的轨迹跟踪控制器横向偏差均值、航向偏差均值以及转角变化率均值分别降低了30.5%、17.2%、7.8%,证明了算法的可行性和有效性。
卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971.
LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization[J]. Acta Armamentarii, 2023, 44(4): 960-971.
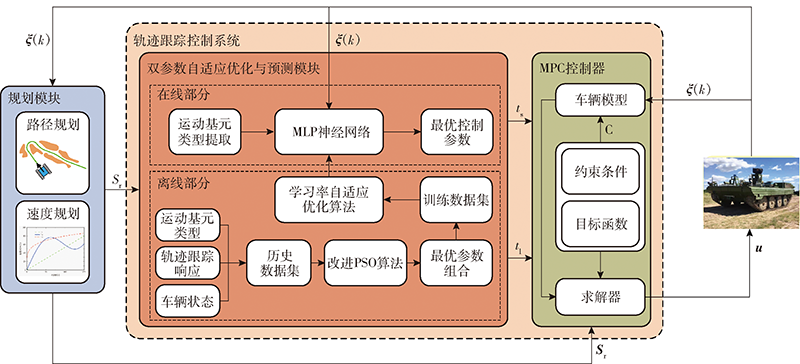
图1 总体框架
Fig.1 Overall framework
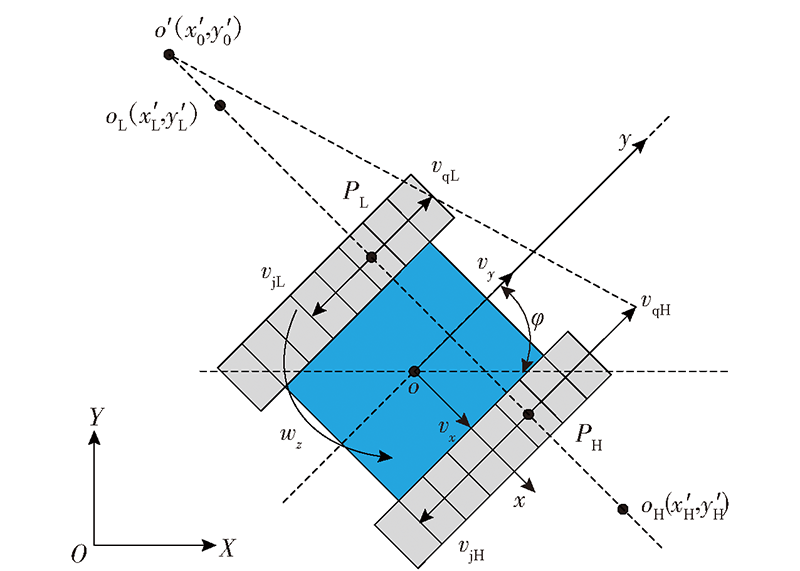
图2 履带车辆运动学模型
Fig.2 Kinematics model of a tracked vehicle
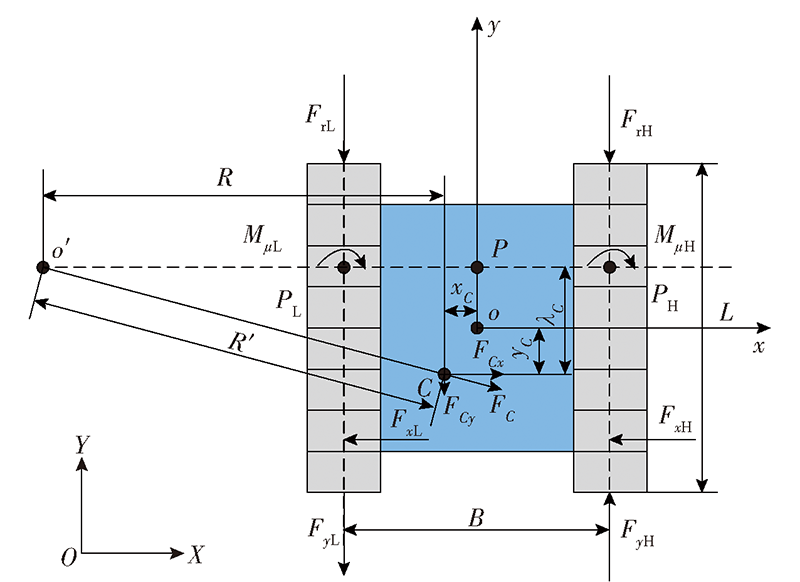
图3 履带车辆动力学模型
Fig.3 Dynamic model of a tracked vehicle
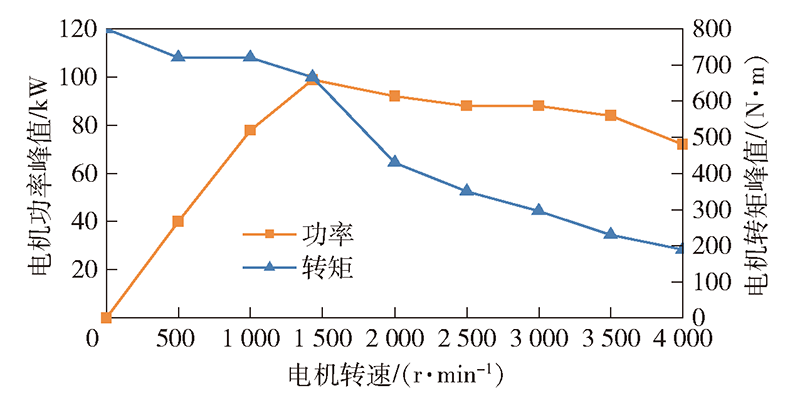
图4 电机外特性
Fig.4 External characteristics of the motor
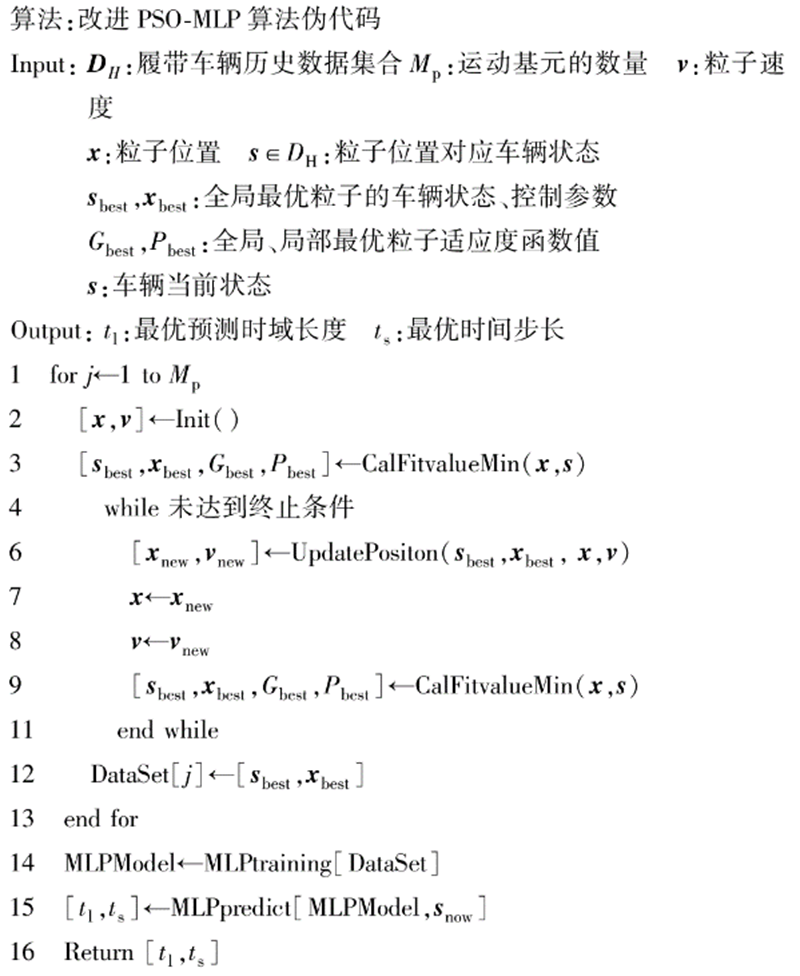
图5 改进PSO-MLP算法伪代码
Fig.5 Pseudo codes of the improved PSO-MLP algorithm
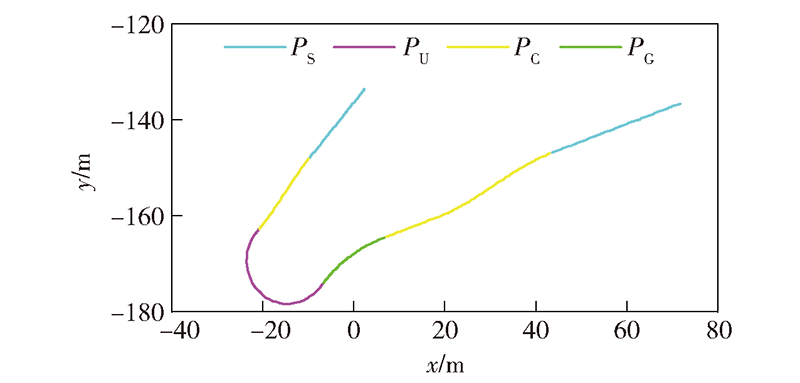
图6 参考路径图
Fig.6 Diagram of the reference path
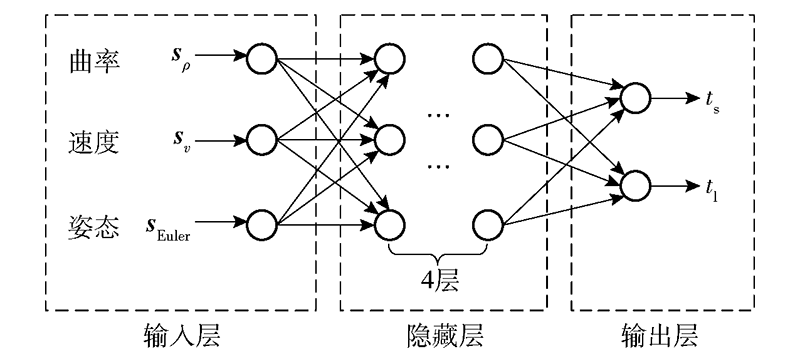
图7 MLP算法原理图
Fig.7 Schematic diagram of the MLP algorithm
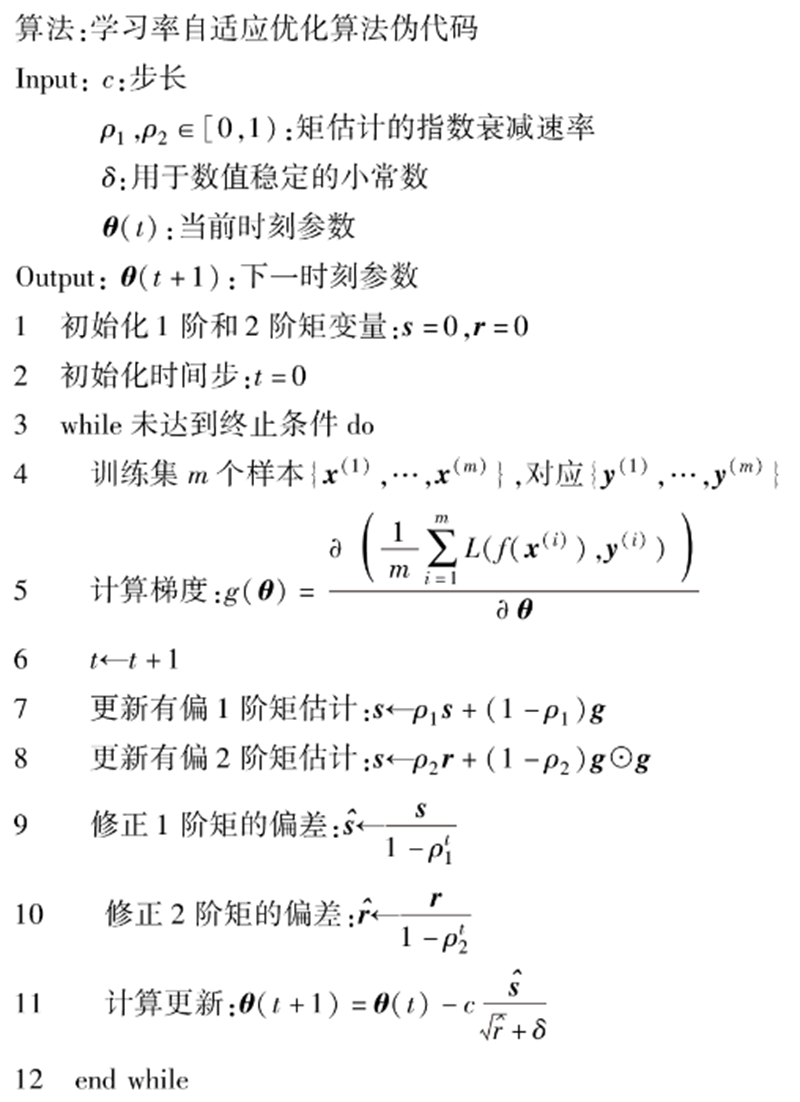
图8 学习率自适应优化算法流程伪代码表
Fig.8 Adaptive learning rate optimization algorithm flow pseudo codes
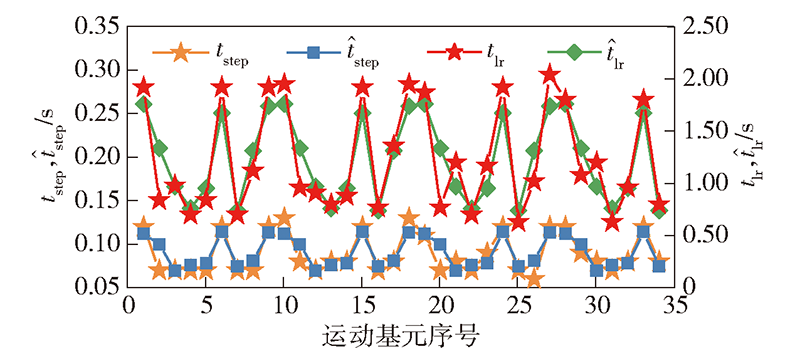
图9 MLP神经网络预测效果
Fig.9 Prediction of the MLP neural network results
| 验证方式 | 参数 | 数值 |
|---|---|---|
| 质量/kg | 2000 | |
| 仿真 | 车长×车宽×车高/mm | 2616×1500×1260 |
| 履带中心距/mm | 1298 | |
| 主动轮半径/mm | 165 | |
| 质量/kg | 9360 | |
| 车长×车宽×车高/mm | 5476×2978×1800 | |
| 履带中心距/mm | 2464 | |
| 履带接地段长度/mm | 3095 | |
| 实车 | 主动轮半径/mm | 265.4 |
| 侧减速器传动比 | 5.5 | |
| 1挡/2挡传动比 | 2.708/1.0 | |
| 重心高度/mm | 850 | |
| 质量增加系数 | 1.446 | |
| 原地转向阻力系数 | 0.574 |
表1 各平台试验参数表
Table 1 Parameters of each platform
| 验证方式 | 参数 | 数值 |
|---|---|---|
| 质量/kg | 2000 | |
| 仿真 | 车长×车宽×车高/mm | 2616×1500×1260 |
| 履带中心距/mm | 1298 | |
| 主动轮半径/mm | 165 | |
| 质量/kg | 9360 | |
| 车长×车宽×车高/mm | 5476×2978×1800 | |
| 履带中心距/mm | 2464 | |
| 履带接地段长度/mm | 3095 | |
| 实车 | 主动轮半径/mm | 265.4 |
| 侧减速器传动比 | 5.5 | |
| 1挡/2挡传动比 | 2.708/1.0 | |
| 重心高度/mm | 850 | |
| 质量增加系数 | 1.446 | |
| 原地转向阻力系数 | 0.574 |
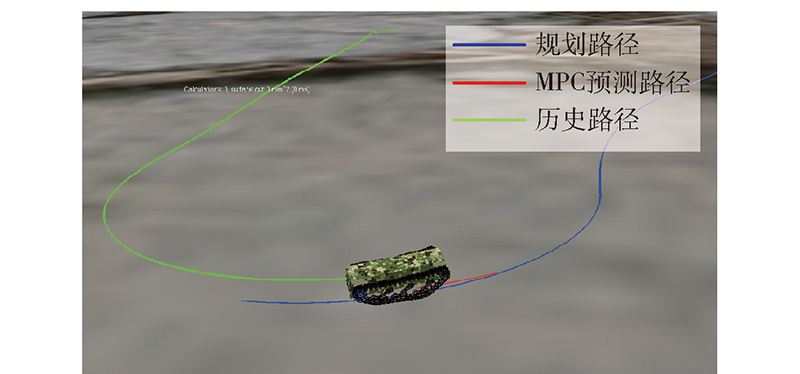
图10 ROS-VREP联合仿真环境
Fig.10 ROS-VREP co-simulation environment
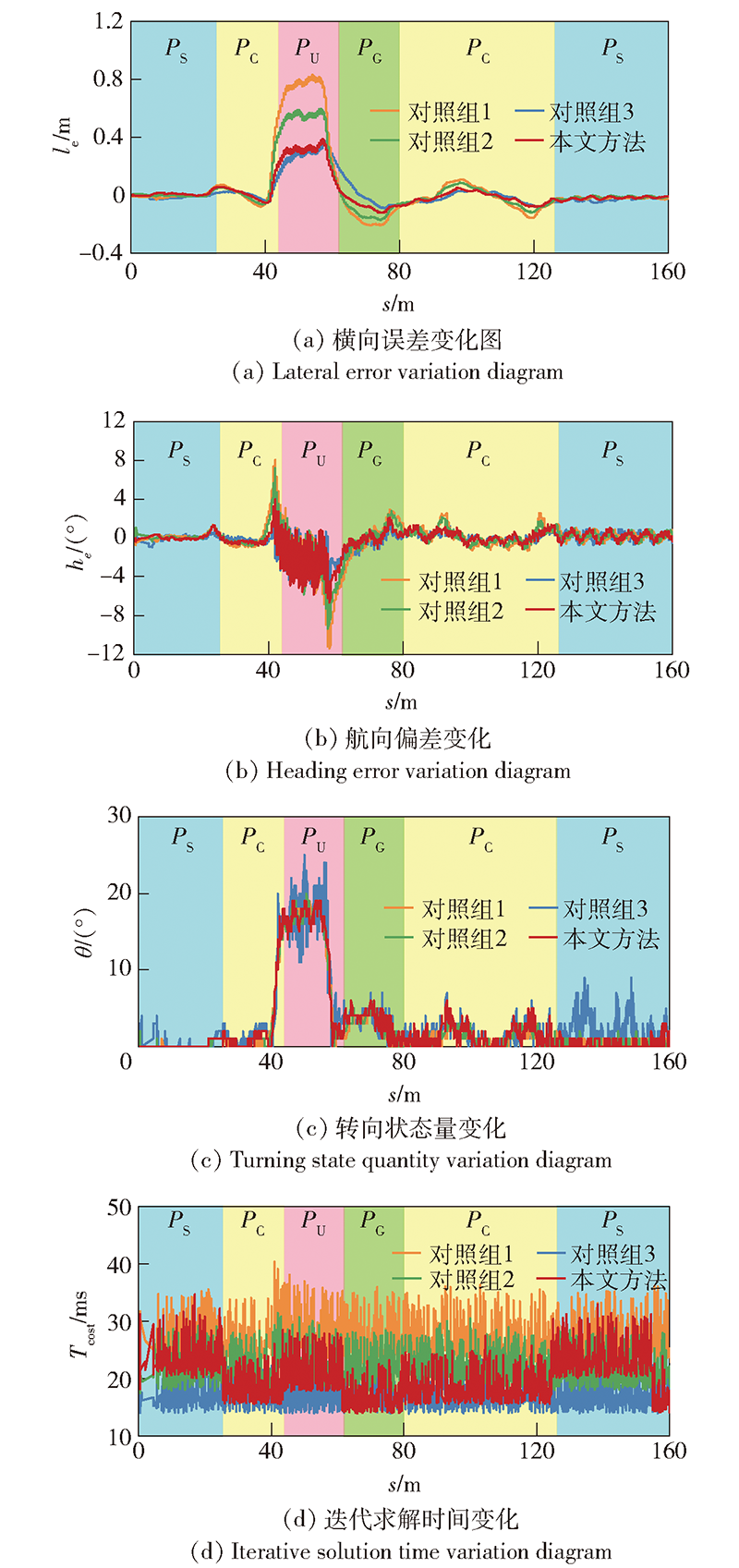
图11 仿真实验轨迹跟踪效果
Fig.11 Simulated trajectory tracking performance
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.147 | 1.202 | 0.138 | 26.490 |
| 对照组2 | 0.112 | 1.008 | 0.257 | 21.940 |
| 对照组3 | 0.072 | 0.694 | 0.602 | 17.111 |
| 本文算法 | 0.075 | 0.824 | 0.262 | 20.297 |
表2 仿真实验轨迹跟踪效果统计表
Table 2 Statistics of simulated tracking performance
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.147 | 1.202 | 0.138 | 26.490 |
| 对照组2 | 0.112 | 1.008 | 0.257 | 21.940 |
| 对照组3 | 0.072 | 0.694 | 0.602 | 17.111 |
| 本文算法 | 0.075 | 0.824 | 0.262 | 20.297 |
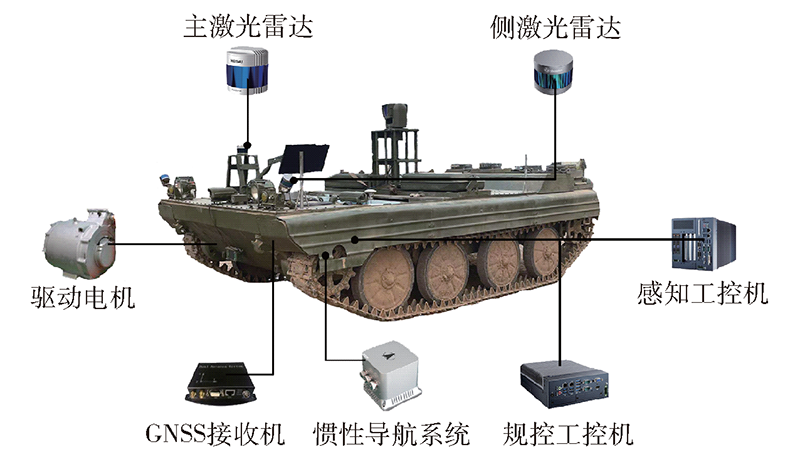
图12 无人驾驶履带车辆试验平台
Fig.12 Experimental platform of the unmanned tracked vehicle
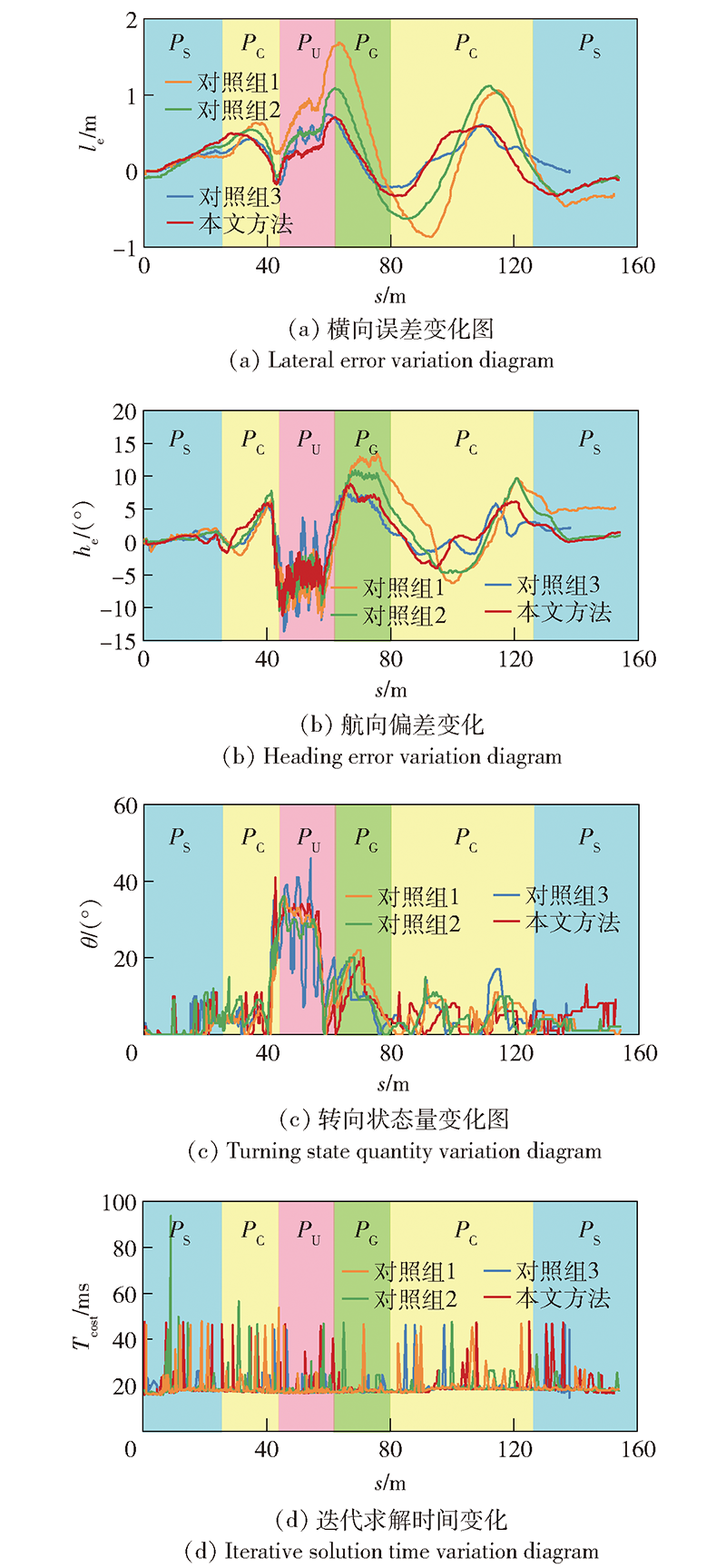
图13 履带车辆试验轨迹跟踪效果
Fig.13 Track performance for the unmanned tracked vehicle
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.419 | 3.746 | 0.801 | 19.302 |
| 对照组2 | 0.394 | 3.828 | 0.991 | 19.113 |
| 对照组3 | 0.188 | 2.321 | 1.075 | 18.203 |
| 本文算法 | 0.274 | 3.171 | 0.914 | 18.789 |
表3 实车试验轨迹跟踪效果统计表
Table 3 Statistics of the tracking performance in real vehicle experiments
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.419 | 3.746 | 0.801 | 19.302 |
| 对照组2 | 0.394 | 3.828 | 0.991 | 19.113 |
| 对照组3 | 0.188 | 2.321 | 1.075 | 18.203 |
| 本文算法 | 0.274 | 3.171 | 0.914 | 18.789 |
| [1] |
doi: 10.1109/TVT.25 URL |
| [2] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3):585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [3] |
|
| [4] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3):456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
|
|
| [5] |
doi: 10.1016/j.ymssp.2019.01.005 URL |
| [6] |
|
| [7] |
doi: 10.1109/TITS.6979 URL |
| [8] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [9] |
|
| [10] |
刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5):514-521.
|
|
|
|
| [11] |
赵新, 纪永祥, 罗熙斌, 等. 基于改进粒子群优化算法的近炸引信最佳炸高计算方法[J]. 兵工学报, 2021, 42(5):924-929.
|
|
doi: 10.3969/j.issn.1000-1093.2021.05.004 |
|
| [12] |
谭顿, 陶建峰, 王旭永. 基于改进粒子群算法的双液压马达同步控制策略[J]. 机械工程学报, 2020, 56(16):254-261.
doi: 10.3901/JME.2020.16.254 |
|
doi: 10.3901/JME.2020.16.254 |
|
| [13] |
doi: 10.1016/j.ymssp.2021.107701 URL |
| [14] |
刘海鸥, 卢佳兴, 彭建鑫, 等. 基于决策树算法的AMT挂挡过程冗余控制研究[J]. 北京理工大学学报, 2022, 42(1):63-73.
|
|
|
|
| [15] |
高玉波, 张伟, 李达诚, 等. 基于反向传播神经网络的陶瓷损伤参数反演分析[J]. 兵工学报, 2018, 39(1):146-152.
doi: 10.3969/j.issn.1000-1093.2018.01.016 |
|
|
|
| [16] |
牛江川, 韩利涛, 李素娟, 等. 基于PSO-BP神经网络的盾构刀具配置研究[J]. 机械工程学报, 2018, 54(10):167-172.
doi: 10.3901/JME.2018.10.167 |
|
doi: 10.3901/JME.2018.10.167 |
|
| [17] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3):600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [18] |
王红岩, 陈冰, 芮强, 等. 集中载荷作用下的履带车辆稳态转向分析与试验[J]. 兵工学报, 2016, 37(12): 2196-2204.
doi: 10.3969/j.issn.1000-1093.2016.12.003 |
|
|
|
| [19] |
王博洋, 龚建伟, 张瑞增, 等. 基于真实驾驶数据的运动基元提取与再生成[J]. 机械工程学报, 2020, 56(16): 155-165.
doi: 10.3901/JME.2020.16.155 |
|
doi: 10.3901/JME.2020.16.155 |
|
| [20] |
|
| [1] | 袁艺,盖江涛,曾根,周广明,李训明,马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107. |
| [2] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [3] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [4] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [5] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [6] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| [7] | 陈美杉, 刘赢, 曾维贵, 钱坤. 空射诱饵弹干扰资源动态分配策略[J]. 兵工学报, 2023, 44(5): 1443-1455. |
| [8] | 曾子豪, 张京东, 龚雪莲, 刘坤明, 桂学文, 廖日东. 拉伸载荷下双销式履带板强度计算方法[J]. 兵工学报, 2023, 44(3): 831-840. |
| [9] | 生辉, 项昌乐, 盖江涛, 袁艺, 简洪超, 张楠. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44(11): 3498-3507. |
| [10] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [11] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [12] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [13] | 袁艺, 盖江涛, 周广明, 高秀才, 李训明, 马长军. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213. |
| [14] | 帅志斌, 贺帅, 李国辉, 李耀恒, 李勇, 张颖, 简洪超. 特种履带车辆机电复合传动装置低温启动过程建模与优化控制[J]. 兵工学报, 2023, 44(1): 117-128. |
| [15] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4