| [1] |
陈泽宇, 赵广耀, 翟丽, 等. 电传动履带车辆原地转向控制与D2P实时仿真[J]. 东北大学学报(自然科学版), 2013, 34(1):114-115.
|
|
CHEN Z Y, ZHAO G Y, ZHAI L, et al. Pivot steering control and D2P real-time simulation for electric tracked vehicle[J]. Journal of Northeastern University(Natural Science), 2013, 34(1):114-115. (in Chinese)
|
| [2] |
盖江涛, 黄守道, 周广明, 等. 双电机耦合驱动履带车辆自适应滑膜转向控制[J]. 兵工学报, 2015, 36(3):405-411.
doi: 10.3969/j.issn.1000-1093.2015.03.004
|
|
GAI J T, HUANG S D, ZHOU G M, et a1.Adaptive sliding mode steering control of double motor coupling drive transmission for tracked vehicle[J]. Acta Armamentarii, 2015, 36(3):405-411. (in Chinese)
|
| [3] |
涂群章, 张晓辰, 潘明, 等. 电传动履带车辆转向补偿控制策略研究术[J]. 机电工程, 2015, 32(5):591-595,665.
|
|
TU Q Z, ZHANG X C, PAN M, et al. Steering compensation control strategy of electric tracked vehicle[J]. Journal of Mechanical & Electrical Engineering, 2015, 32(5):591-595,665. (in Chinese)
|
| [4] |
曾庆含, 马晓军, 廖自力, 等. 双侧电驱动履带车辆等效条件积分滑模稳定转向控制[J]. 兵工学报, 2016, 37(8):1351-1358.
doi: 10.3969/j.issn.1000-1093.2016.08.002
|
|
ZENG Q H, MA X J, LIAO Z L, et al. Stable steer control of electric drive tracked vehicle based on equivalent sliding mode technique with conditional integrator[J]. Acta Armamentarii, 2016, 37(8):1351-1358. (in Chinese)
|
| [5] |
马晓军, 曾庆含, 魏曙光, 等. 电传动履带车辆转向行驶控制策略仿真研究[J]. 装甲兵工程学院学报, 2012, 26(6):41-45.
|
|
MA X J, ZENG Q H, WEI S G, et al. Simulation research of steering control strategy for electric drive tracked vehicles[J]. Journal of Academy of Armored Force Engineering, 2012, 16(6):41-45. (in Chinese)
|
| [6] |
张林晖, 韩恺. 履带车辆低速转向过程协调控制仿真研究[J]. 车辆与动力技术, 2015(2):6-11.
|
|
ZHANG L H, HAN K. Research on coordinated control simulation of a tracked vehicle with low speed steering[J]. Vehicle & Power Technology, 2015(2):6-11. (in Chinese)
|
| [7] |
翟丽, 孙逢春, 谷中丽. 电子差速履带车辆转向转矩神经网络PID控制[J]. 农业机械学报, 2009, 40(2):1-4.
|
|
ZHAI L, SUN F C, GU Z L. Neural networks PID control of steering torque for electronic differential tracked vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(2):1-4. (in Chinese)
|
| [8] |
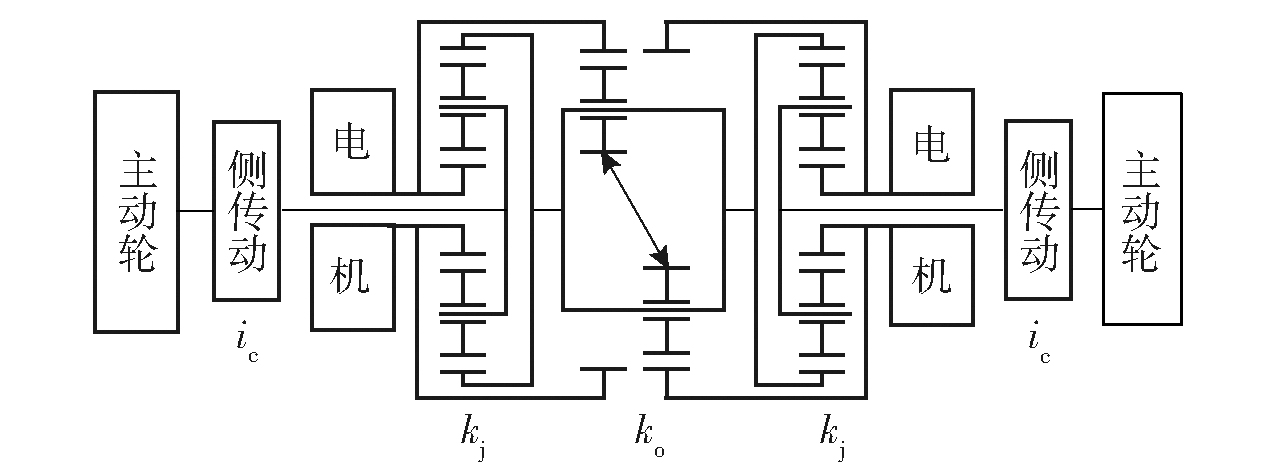
盖江涛, 李慎龙, 周广明, 等. 一种履带车辆机电复合传动装置:中国CN101985279A[P]. 2011-11-02.
|
|
GAI J T, LI S L, ZHOU G M, et a1. A type of electro-mechanical transmission for tracked vehicle:China,CNl01985279A[P].2011-11-02. (in Chinese)
|
| [9] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16): 162-172.
|
|
WANG H Y, WANG Q L, RUI Q, et al. Analyzing and testing verification the performance about high-speed tracked vehicles in steering process[J]. Journal of Mechanical Engineering, 2014, 50(16):162-172. (in Chinese)
|
| [10] |
李军魁, 王红岩, 芮强. 履带车辆稳态转向性能分析与试验[J]. 机械工程师, 2016(1):82-85.
|
|
LI J K, WANG H Y, RUI Q. Analysis and test of steady-state steering performance of tracked vehicle[J]. Mechanical Engineer, 2016(1):82-85. (in Chinese)
|
| [11] |
VAN DER MERWE D W, ENGELBRECHT A P. Data clustering using particle swarm optimization[C] //Proceedings of the 2003 Congress on Evolutionary Computation.Canberra,Australia:ACT, 2003, 1:215-220.doi: 10.1109/CEC.2003.1299577.
|
| [12] |
RATNAWEER A, HALGAMUGE S K, WATSON H C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[M]. New York,NY,US: IEEE Press, 2004.
|
| [13] |
MOHARAM A, El-HOSSEINI M A, ALI H A. Design of optimal PID controller using hybrid differential evolution and particle swarm optimization with an aging leader and challengers[J]. Applied Soft Computing, 2016, 38:727-737.
doi: 10.1016/j.asoc.2015.10.041
URL
|
| [14] |
杨友良, 马强, 张怡. 粒子群优化模糊PID算法的充电策略研究[J]. 现代电子技术, 2021, 44(21):101-104.
|
|
MA Y L, MA Q, ZHANG Y. Research on charging strategy of fuzzy PID algorithm optimized by particle swarm optimization[J]. Modern Electronics Technique, 2021, 44(21):101-104. (in Chinese)
|
| [15] |
李义罡, 焦朋朋, 乔伟栋. 基于改进粒子群优化BP神经网络的弯道转向行为预测[J]. 公路交通科技, 2019, 36(10):128-136.
doi: 10.3969/j.issn.1002-0268.2019.10.017
|
|
LI Y G, JIAO P P, QIAO W D. Prediction of steering behaviors on curves based on BP neural network optimized by modified PSO[J]. Journal of Highway and Transportation Research and Development, 2019, 36(10):128-136. (in Chinese)
|
| [16] |
刘祎玮, 唐路平, 王咏婷, 等. 粒子群优化模糊PID的四旋翼飞行器控制[J]. 自动化与仪表, 2022, 37(8):13-18.
|
|
LIU Y W, TANG L P, WANG Y T, et al. Particle swarm optimized fuzzy PID for quadrotor control[J]. Automation & Instrumentation, 2022, 37(8):13-18. (in Chinese)
|
| [17] |
张伟, 谢源海, 王亚刚. 基于收敛性分析的偏差粒子群优化算法及PID仿真应用[J]. 控制工程, 2021, 28(7):1466-1473.
|
|
ZHANG W, XIE Y H, WANG Y G. A deviation particle swarm optimization algorithm based on convergence analysis and its application on PID tuning[J]. Control Engineering of China, 2021, 28(7):1466-1473. (in Chinese)
|
| [18] |
SHI Y, KENNEDY R C. A modified particle swarm optimizer[C]//Proceedings of the IEEE Congress on Evolutionary Computation. New York,NY,US: IEEE Press, 1998:69-73.
|
| [19] |
朱红萍, 罗隆福. 基于ITAE 指标的PID控制器参数优化设计[J]. 智能控制技术电气自动化, 2009, 31(6):37-39.
|
|
ZHU H P, LUO L F. Optimization design of PID controller parameters based on ITAE index[J]. Intelligent Control Techniques Electrical Automation, 2009, 31(6):37-39. (in Chinese)
|
| [20] |
姚俊, 张劲恒. 采用改进粒子群优化算法与人工神经网络相结合的车辆转向控制研究[J]. 中国工程机械学报, 2018, 16(6):480-485.
|
|
YAO J, ZHANG J H. Vehicle steering control based on improved particle swarm optimization and artificial neural network[J]. Chinese Journal of Construction Machinery, 2018, 16(6):480-485. (in Chinese)
|
| [21] |
张金红, 高南, 宋立彬. 基于改进PSO的矿用液压支架PID参数控制[J]. 煤炭技术, 2022, 41(7):166-168.
|
|
ZHANG J H, GAO N, SONG L B. PID parameter control of mining hydraulic support based on improved PSO[J]. Coal Technology, 2022, 31(1):15-19. (in Chinese)
|
| [22] |
于彦. 自适应权重混合粒子群优化算法在PID整定中的应用[J]. 无线通信技术, 2022, 31(1):15-19.
|
|
YU Y. Application of adaptive weight and hybrid PSO in PID tuning[J]. Wireless Communication Technology, 2022, 31(1):15-19. (in Chinese)
|

 ), 盖江涛2, 李训明2
), 盖江涛2, 李训明2
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4