
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (6): 1564-1575.doi: 10.12382/bgxb.2022.0095
范博洋, 赵高鹏*( ), 薄煜明, 吴祥
), 薄煜明, 吴祥
收稿日期:2022-02-19
上线日期:2023-06-30
通讯作者:
FAN Boyang, ZHAO Gaopeng*(), BO Yuming, WU Xiang
Received:2022-02-19
Online:2023-06-30
摘要:
针对由地面无人车与多无人机组成的空地异构无人系统面向大范围、多目标的协同任务分配问题,以无人系统完成任务时间为优化目标,同时考虑无人机收放、续航能力以及任务时序等约束条件,建立空地异构无人系统的任务分配模型,提出一种多目标空地异构无人系统任务分配方法。结合密度值最大聚类和混合粒子群优化算法,对空地异构无人系统的任务分配问题进行求解,从而得到满足约束条件的全局任务分配结果;通过仿真实验对所提方法进行验证。实验结果表明,该方法能够有效地求解在不同作战环境中的空地异构无人系统的任务分配问题。
范博洋, 赵高鹏, 薄煜明, 吴祥. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575.
FAN Boyang, ZHAO Gaopeng, BO Yuming, WU Xiang. Collaborative Task Allocation Method for Multi-Target Air-Ground Heterogeneous Unmanned System[J]. Acta Armamentarii, 2023, 44(6): 1564-1575.
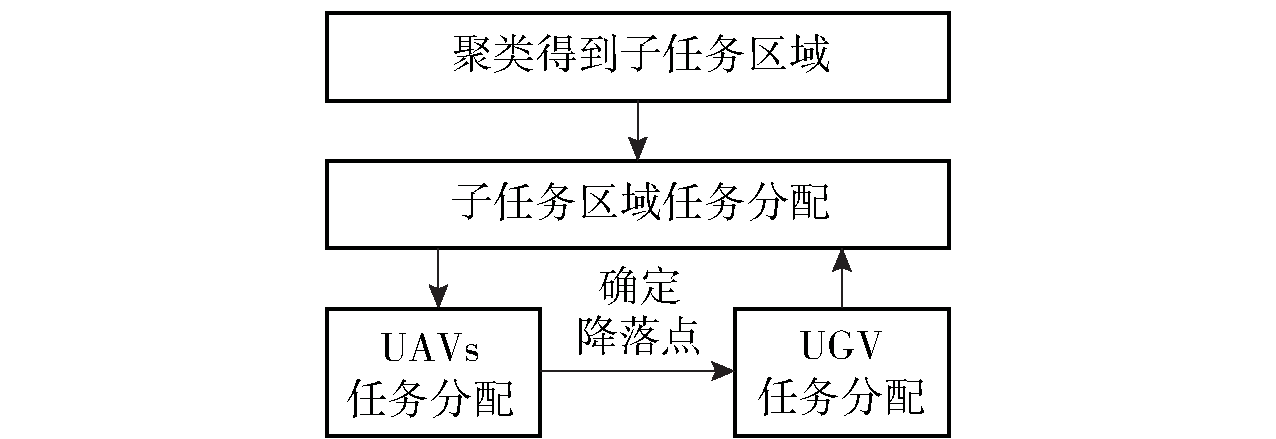
图1 本文的研究思路
Fig.1 Main idea of this study
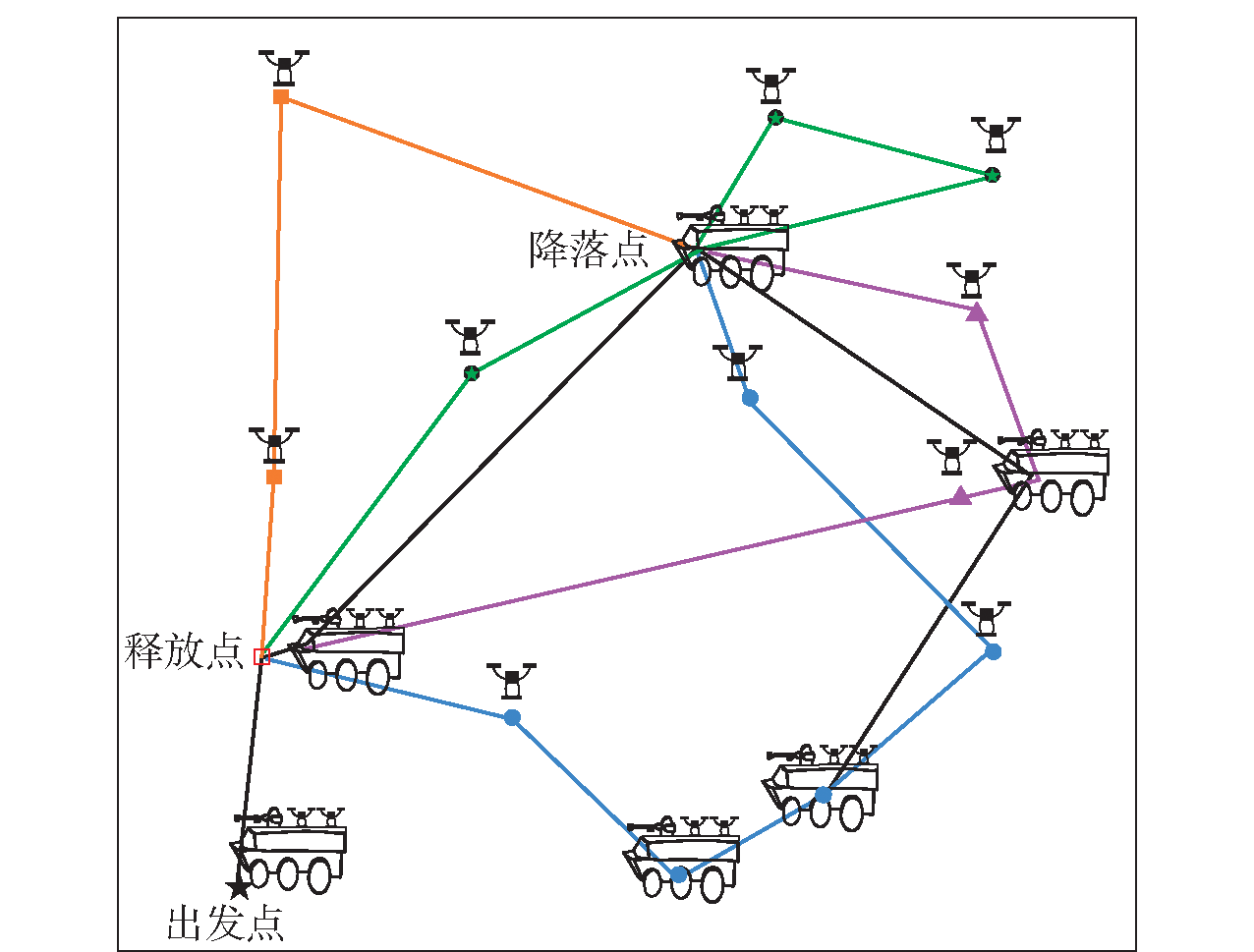
图2 多目标空地异构无人系统协同作战过程示意图
Fig.2 Schematic diagram of collaborative operation process of multi-target air-ground heterogeneous unmanned system
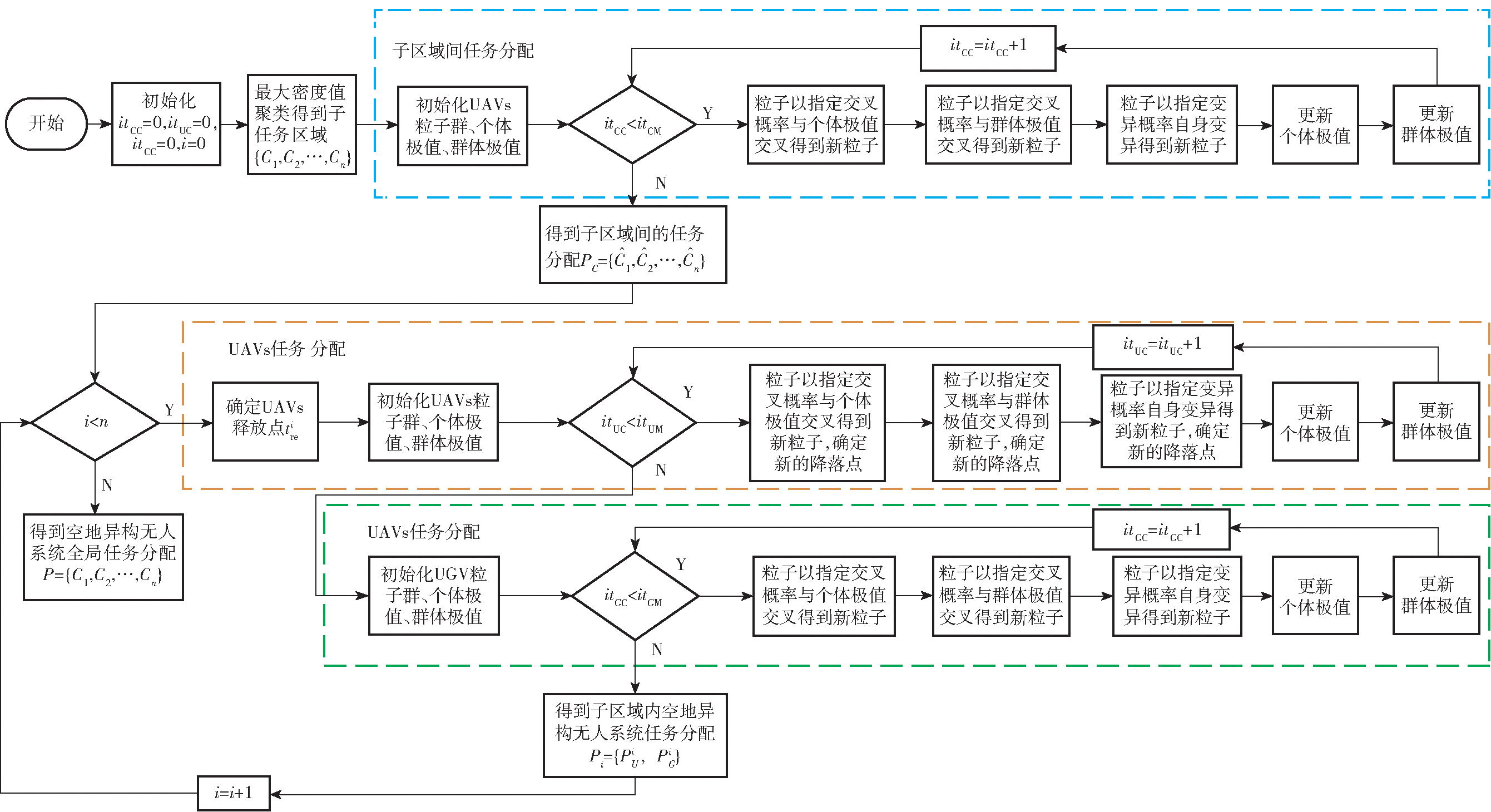
图3 多目标空地异构无人系统协同任务分配方法流程图
Fig.3 Process of the task allocation method for multi-target air-ground heterogeneous unmanned system
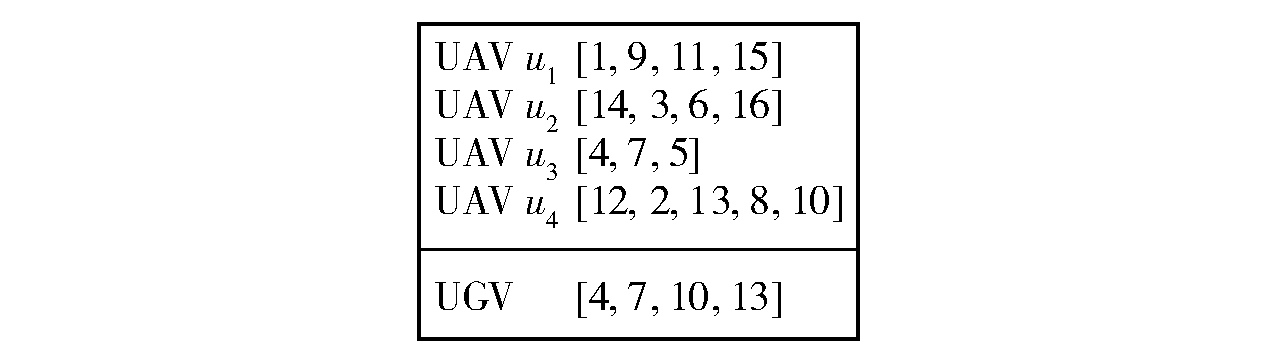
图4 粒子表示方法
Fig.4 A sample of the particle code
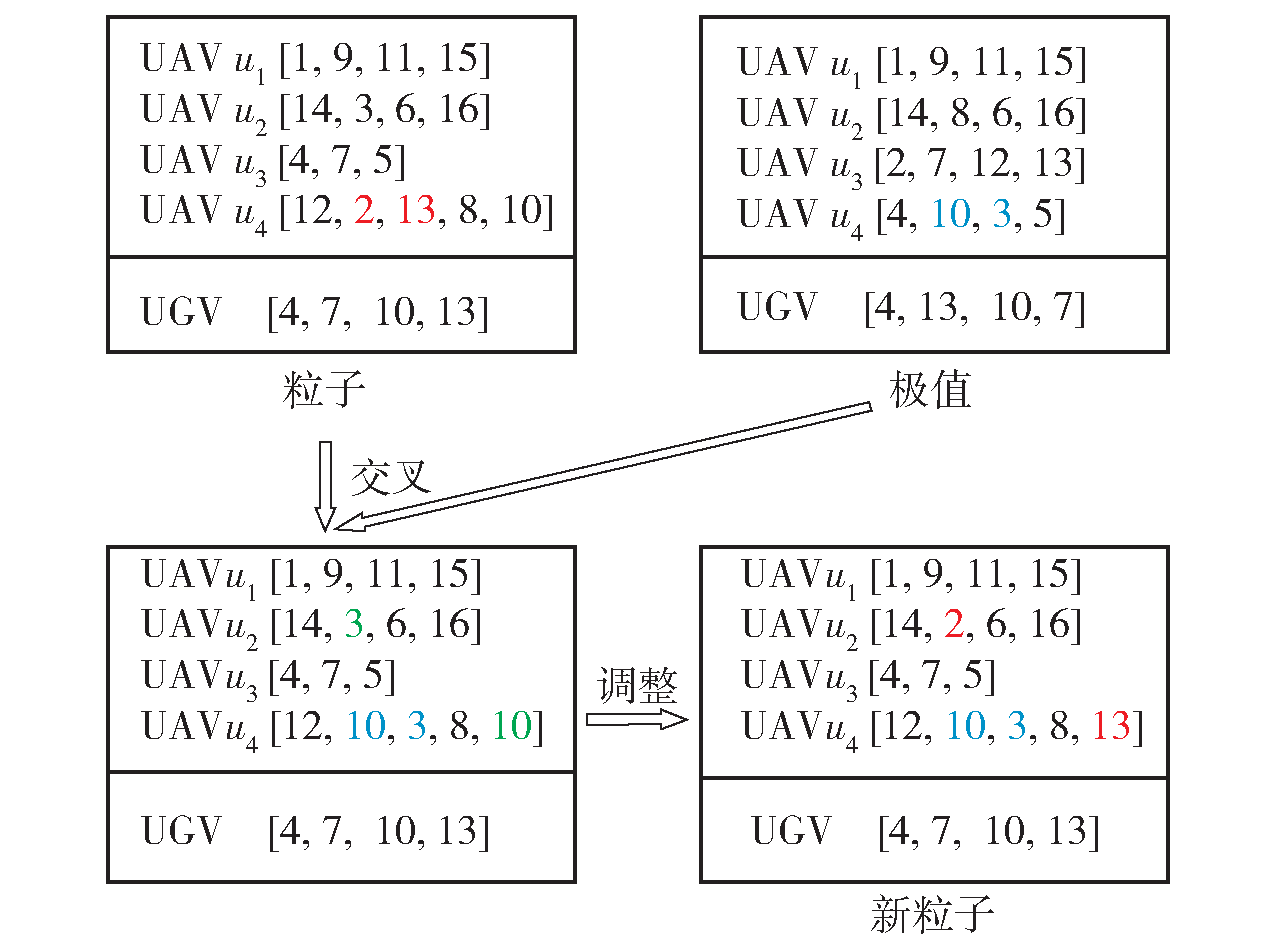
图5 交叉操作方法
Fig.5 A sample of the crossover operation
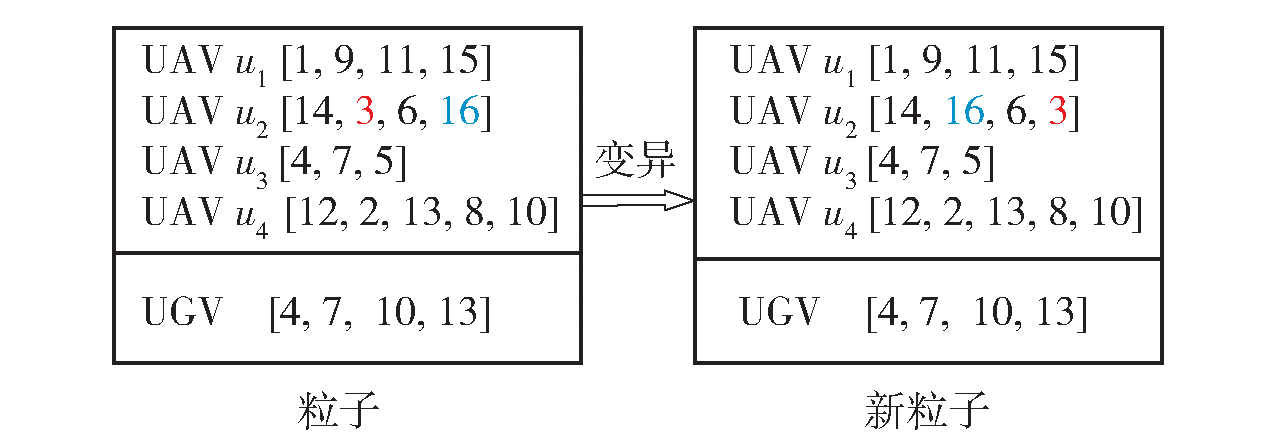
图6 变异操作方法
Fig.6 A sample of the mutation operation
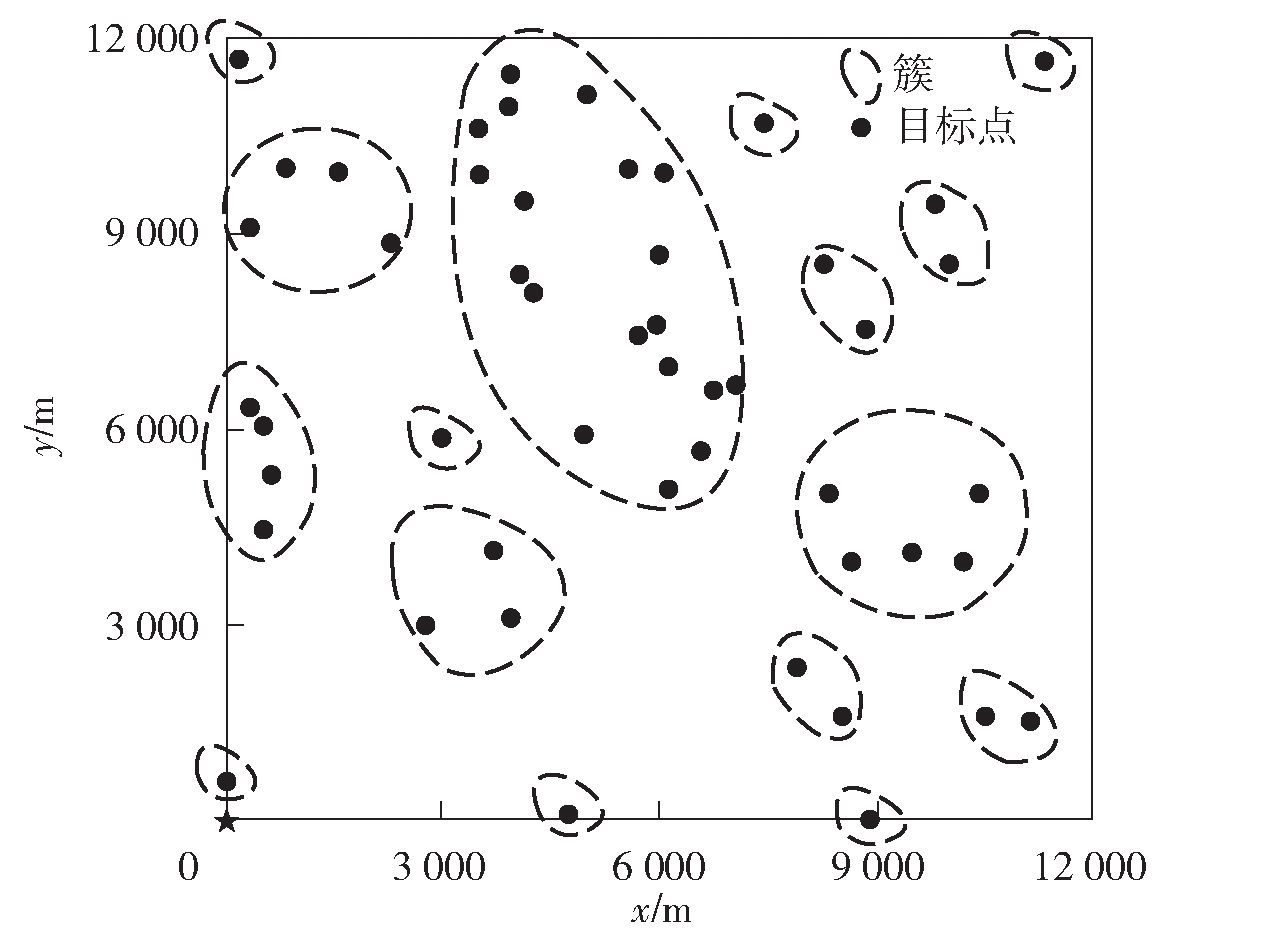
图7 密度值最大聚类效果图
Fig.7 Result of density peak clustering
| 聚类算法 | 发现簇数量 | DBI值 |
|---|---|---|
| 密度值最大聚类 | 16 | 0.9281 |
| DBSCAN算法 | 16 | 1.0168 |
| k-means算法 | 16(手动设定) | 1.5859 |
表1 12000m×12000m范围聚类划分结果对比
Table 1 Comparison of clustering results in the range of 12000m×12000m
| 聚类算法 | 发现簇数量 | DBI值 |
|---|---|---|
| 密度值最大聚类 | 16 | 0.9281 |
| DBSCAN算法 | 16 | 1.0168 |
| k-means算法 | 16(手动设定) | 1.5859 |
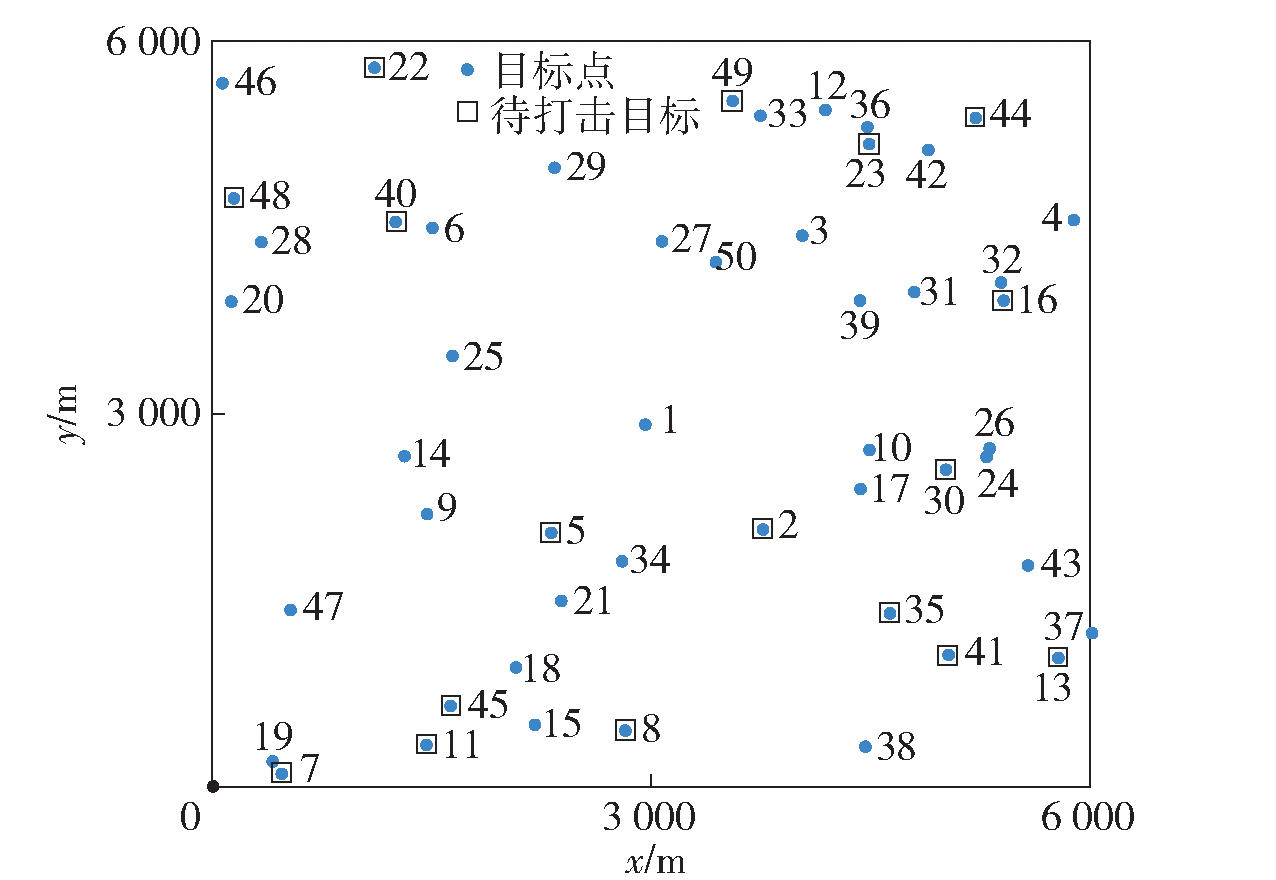
图8 6000m×6000m范围内目标分布图
Fig.8 Target distribution map in the range of 6000m×6000m
| 算法 | 参数 | 数值 | 算法 | 参数 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 800 | 250 | |||
| 密度值最大聚类 | 密度阈值 | 5 | 混合粒子群优化 | 迭代次数 | 2400 | 800 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 |
表2 6000m×6000m范围协同任务分配方法参数
Table 2 Parameters of thecollaborative task allocation method in the range of 6000m×6000m
| 算法 | 参数 | 数值 | 算法 | 参数 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 800 | 250 | |||
| 密度值最大聚类 | 密度阈值 | 5 | 混合粒子群优化 | 迭代次数 | 2400 | 800 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 |
| 无人系统 | 释放点 坐标/m | 任务序列 | 任务耗时/s | 降落点 | UGV抵达降 落点耗时/s |
|---|---|---|---|---|---|
| UAV1 | [7,38,10,4, 44,42, 23,36,12,33,49,29] | 1718.11 | |||
| UAV2 | [11,15,8,5,14,20,28,48,46,22] | 1340.85 | |||
| UAV3 | (365,106) | [47,9,21,34,1,39,31,16,32,3,50,27,40,6] | 1562.53 | 目标点[40] | 1335.49 |
| UAV4 | [19,45,18,17,30,26,24,43,37,13,41,35,2,25] | 1643.87 | |||
| UGV | [7,48,22,40,5,45,11,8,2,35,41,13,30,16,44,23,49] | 4323.73 |
表3 6000m×6000m范围协同任务分配结果
Table 3 Collaborative task allocation in the range of 6000m×6000m
| 无人系统 | 释放点 坐标/m | 任务序列 | 任务耗时/s | 降落点 | UGV抵达降 落点耗时/s |
|---|---|---|---|---|---|
| UAV1 | [7,38,10,4, 44,42, 23,36,12,33,49,29] | 1718.11 | |||
| UAV2 | [11,15,8,5,14,20,28,48,46,22] | 1340.85 | |||
| UAV3 | (365,106) | [47,9,21,34,1,39,31,16,32,3,50,27,40,6] | 1562.53 | 目标点[40] | 1335.49 |
| UAV4 | [19,45,18,17,30,26,24,43,37,13,41,35,2,25] | 1643.87 | |||
| UGV | [7,48,22,40,5,45,11,8,2,35,41,13,30,16,44,23,49] | 4323.73 |
图9 6000m×6000m范围内协同任务分配示意图
Fig.9 Schematic diagram of the collaborative taskallocation in the range of 6000m×6000m
图10 各UAV飞行时间曲线
Fig.10 Flight time curves of UAVs
图11 12000m×12000m范围内目标分布图
Fig.11 Target distribution map in the range of 12000m×12000m
| 参数 | UAV任务分配 | UGV任务分配 |
|---|---|---|
| 种群数量 | 800 | 250 |
| 迭代次数 | 2400 | 800 |
| 交叉概率 | 0.7 | 0.7 |
| 变异概率 | 0.7 | 0.7 |
表4 12000m×12000m范围不划分子任务区域的协同任务分配方法参数
Table 4 Parameters of the task allocation method without clustering in the range of 12000m×12000m
| 参数 | UAV任务分配 | UGV任务分配 |
|---|---|---|
| 种群数量 | 800 | 250 |
| 迭代次数 | 2400 | 800 |
| 交叉概率 | 0.7 | 0.7 |
| 变异概率 | 0.7 | 0.7 |
| 无人 系统 | 规划结果 | ||
|---|---|---|---|
| 释放点 坐标/m | 任务 序列 | 降落点 | |
| UAV1 | [14,37,38,30,50,49,20,26,6,36,17,33,45] | 目标点[5] | |
| UAV2 | (617,85) | [1,24,18,3,47,34,25,19,15,23] | |
| UAV3 | [41,35,46,8,40,9,16,39,4,44,31,7,13,27] | ||
| UAV4 | [2,10,28,48,22,12,43,29,32,42,11,5,21] | ||
表5 12000m×12000m范围不聚类划分子任务区域的协同任务分配结果
Table 5 Task allocation result without clustering in the range of 12000m×12000m
| 无人 系统 | 规划结果 | ||
|---|---|---|---|
| 释放点 坐标/m | 任务 序列 | 降落点 | |
| UAV1 | [14,37,38,30,50,49,20,26,6,36,17,33,45] | 目标点[5] | |
| UAV2 | (617,85) | [1,24,18,3,47,34,25,19,15,23] | |
| UAV3 | [41,35,46,8,40,9,16,39,4,44,31,7,13,27] | ||
| UAV4 | [2,10,28,48,22,12,43,29,32,42,11,5,21] | ||
| 算法 | 参数 | 数值 | 算法 | 参数 | 子任务区域任务分配 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 240 | 240 | 50 | |||
| 密度值最大聚类算法 | 密度阈值 | 5 | 混合粒子群优化算法 | 迭代次数 | 720 | 720 | 200 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 | 0.7 |
表6 12000m×12000m范围协同任务分配方法参数
Table 6 Parameters of the collaborative task allocation method in the range of 12000m×12000m
| 算法 | 参数 | 数值 | 算法 | 参数 | 子任务区域任务分配 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 240 | 240 | 50 | |||
| 密度值最大聚类算法 | 密度阈值 | 5 | 混合粒子群优化算法 | 迭代次数 | 720 | 720 | 200 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 | 0.7 |
图12 子任务区域的划分和任务分配
Fig.12 Clustering and task allocation
| |
表7 12000m×12000m范围内多目标空地异构无人系统协同任务分配结果
Table 7 Collaborative task allocation for multi-target air-ground heterogeneous unmanned system in the range of 12000m×12000m
| |
图13 12000m×12000m范围内多目标空地异构无人系统协同任务分配示意图
Fig.13 Schematic diagram of the collaborative task allocation for multi-target air-ground heterogeneous unmanned system in the range of 12000m×12000m
| [1] |
武文亮, 周兴社, 沈博, 等. 集群机器人系统特性评价研究综述[J]. 自动化学报, 2020, 46(13): 1-20.
|
|
|
|
| [2] |
doi: 10.1016/j.cja.2013.07.009 URL |
| [3] |
|
| [4] |
doi: 10.1016/j.ast.2018.05.039 URL |
| [5] |
|
| [6] |
doi: 10.1109/LRA.2021.3067286 URL |
| [7] |
|
| [8] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [9] |
doi: 10.1016/j.trc.2015.03.005 URL |
| [10] |
doi: 10.1016/j.trc.2017.11.015 URL |
| [11] |
|
| [12] |
doi: 10.1109/TITS.2021.3066240 URL |
| [13] |
doi: 10.1109/LRA.2022.3148489 URL |
| [14] |
doi: 10.1007/s10514-018-9712-y |
| [15] |
doi: 10.1016/j.cor.2005.02.039 URL |
| [16] |
doi: 10.1016/j.cor.2010.06.001 URL |
| [17] |
doi: 10.1109/ACCESS.2021.3076919 URL |
| [18] |
doi: 10.1016/j.ast.2019.06.024 URL |
| [19] |
doi: 10.1016/j.jocs.2021.101545 URL |
| [20] |
王晶, 夏鲁宁, 荆继武. 一种基于密度最大值的聚类算法[J]. 中国科学院大学学报, 2009, 26(4): 539-548.
doi: 10.7523/j.issn.2095-6134.2009.4.016 |
|
doi: 10.7523/j.issn.2095-6134.2009.4.016 |
| [1] | 马维宁, 胡起伟, 陈静, 贾希胜. 装备群选择性维修决策与任务分配联合优化[J]. 兵工学报, 2024, 45(2): 407-416. |
| [2] | 马潇, 李新祺, 刘镇源, 邸超. 基于背景感知相关滤波跟踪器的目标快速跟踪方法[J]. 兵工学报, 2024, 45(2): 497-503. |
| [3] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [4] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [5] | 王磊, 徐超, 李淼, 赵慧武. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8): 2224-2232. |
| [6] | 杜伟伟, 陈小伟. 陆军战术级作战任务分配及优化方法[J]. 兵工学报, 2023, 44(5): 1431-1442. |
| [7] | 关海杰, 王博洋, 王旭睿, 刘海鸥, 陈慧岩. 搭载任务载荷军用地面无人系统发展综述[J]. 兵工学报, 2023, 44(11): 3333-3344. |
| [8] | 卫宁, 王冠. 强化学习在智能无人系统决策管理中的应用[J]. 兵工学报, 2022, 43(S2): 164-169. |
| [9] | 徐同乐, 刘方, 肖玉杰, 王慎, 白一惠, 罗荣. 国外无人反水雷装备及技术发展[J]. 兵工学报, 2022, 43(S2): 64-70. |
| [10] | 龚诗雄, 王旭, 孔国杰, 龚建伟. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10): 2429-2442. |
| [11] | 张云飞, 林德福, 郑多, 程子恒, 唐攀. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495. |
| [12] | 张哲, 吴剑, 代冀阳, 李品伟. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539. |
| [13] | 昝翔, 陈春良, 张仕新, 王铮, 刘彦. 多约束条件下战时装备维修任务分配方法[J]. 兵工学报, 2017, 38(8): 1603-1609. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4