
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (10): 3619-3630.doi: 10.12382/bgxb.2023.0742
周浩, 暴小鹏*( ), 张洪刚
), 张洪刚
收稿日期:2023-08-11
上线日期:2024-02-06
通讯作者:
基金资助:
ZHOU Hao, BAO Xiaopeng*(), ZHANG Honggang
Received:2023-08-11
Online:2024-02-06
摘要:
为解决非线性自抗扰控制应用中无人机位姿跟踪控制响应相位滞后的问题,利用非线性函数的滤波特性与相位补偿机理完成调相补偿器设计,解决了跟踪微分器实际滤波与相位跟踪之间的矛盾,进而提出调相补偿改进后的自抗扰控制(Phase Compensation ADRC,PCADRC),将其应用于四旋翼无人机飞控作业中的姿态与轨迹跟踪。通过由空中避障圆角矩和锥形螺旋组成的复合轨迹跟踪分析PCADRC应用的飞航控制性能优势,并设计无人机轨迹跟踪抗扰实验,对自抗扰控制的调相补偿改进效果进行验证。仿真与实验结果表明,对于平面或空间、平缓或陡变不同性质的轨迹,PCADRC能在确保抑扰性能前提下提高位姿跟踪的准确性、时效性与鲁棒性,能更好满足其稳健的飞控需求。
中图分类号:
周浩, 暴小鹏, 张洪刚. 无人机自抗扰控制的调相补偿改进设计与抑扰实现[J]. 兵工学报, 2024, 45(10): 3619-3630.
ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control[J]. Acta Armamentarii, 2024, 45(10): 3619-3630.
| 参数 | 数值 |
|---|---|
| m/kg | 1.5 |
| l/m | 0.225 |
| g/(m·s-2) | 9.81 |
| Ix/(kg·m2) | 0.03 |
| Iy/(kg·m2) | 0.03 |
| Iz/(kg·m2) | 0.03 |
表1 四旋翼无人机机体参数[9]
Table 1 Quadrotor UAV body parameters[9]
| 参数 | 数值 |
|---|---|
| m/kg | 1.5 |
| l/m | 0.225 |
| g/(m·s-2) | 9.81 |
| Ix/(kg·m2) | 0.03 |
| Iy/(kg·m2) | 0.03 |
| Iz/(kg·m2) | 0.03 |

图1 调相补偿器设计结构
Fig.1 Design structure of phase modulation compensator

图2 PCADRC结构框架
Fig.2 Structural framework of PCADRC

图3 不同h取值下滚转角通道的跟踪曲线
Fig.3 Tracking curves of roll angle channels under different h values

图4 不同σ取值下观测到的系统总扰动
Fig.4 Total disturbance of the system observed under different σ values

图5 不同bφ取值下补偿扰动与实际扰动的吻合程度
Fig.5 The degree of coincidence between the disturbance amount compensated by NLSEF and the actual disturbance under different compensation coefficient values
| 组件 | 符号 | 数值 | 组件 | 符号 | 数值 | 组件 | 符号 | 数值 |
|---|---|---|---|---|---|---|---|---|
| TD | r | 10.2 | ESO | β1 | 30 | NLSEF | a1n | 0.65 |
| h | 0.154 | β2 | 300 | a2n | 1.6 | |||
| 调相 补偿 器 | a1 | 0.43 | β3 | 1000 | k1 | 28.6 | ||
| a2 | 2 | a1e | 0.5 | k2 | 22.4 | |||
| λ | 3.8 | a2e | 0.25 | σ | 0.05 | |||
| σ1 | 1 | σ | 0.05 | bi | 35.7 |
表2 PCADRC方法参数整定值
Table 2 Control parameter setting values of PCADRC
| 组件 | 符号 | 数值 | 组件 | 符号 | 数值 | 组件 | 符号 | 数值 |
|---|---|---|---|---|---|---|---|---|
| TD | r | 10.2 | ESO | β1 | 30 | NLSEF | a1n | 0.65 |
| h | 0.154 | β2 | 300 | a2n | 1.6 | |||
| 调相 补偿 器 | a1 | 0.43 | β3 | 1000 | k1 | 28.6 | ||
| a2 | 2 | a1e | 0.5 | k2 | 22.4 | |||
| λ | 3.8 | a2e | 0.25 | σ | 0.05 | |||
| σ1 | 1 | σ | 0.05 | bi | 35.7 |
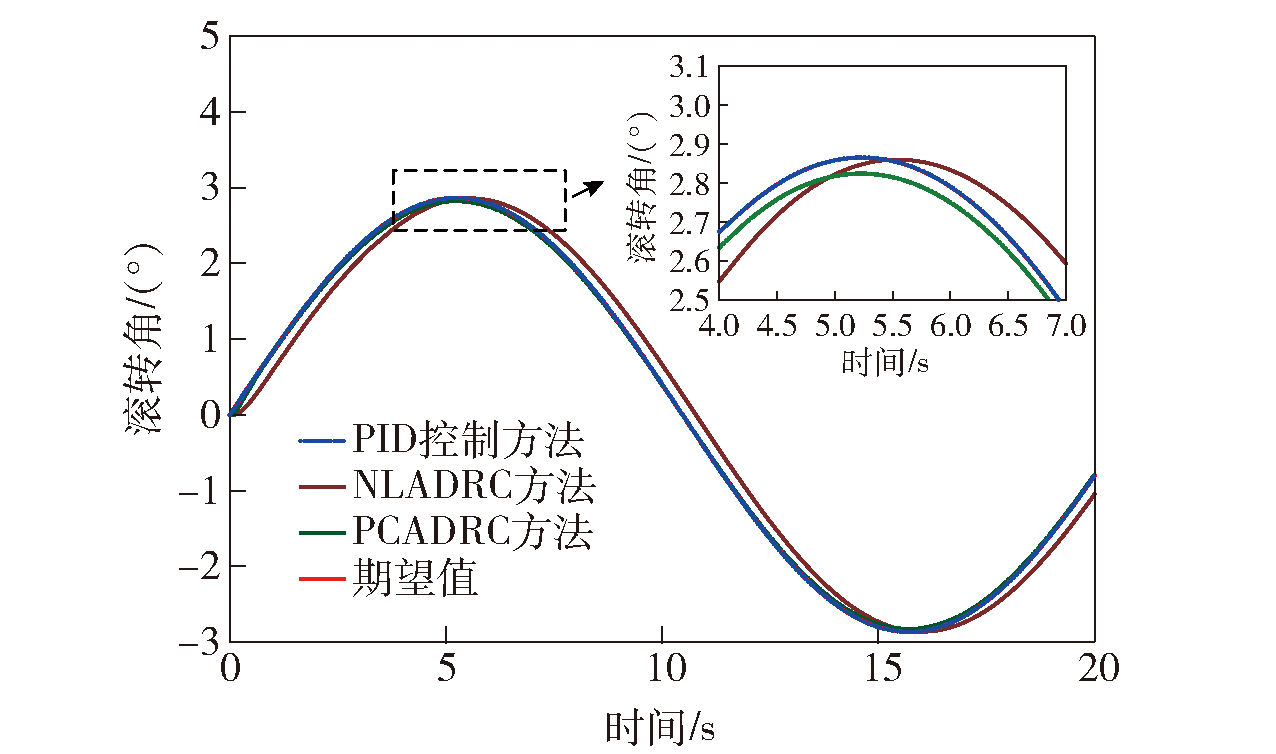
图6 无背景噪声时滚转通道指令跟踪效果
Fig.6 Rolling channel command tracking effect without background noise

图7 滚转通道带噪声输入指令
Fig.7 Rolling channel noise input command

图8 白噪声背景下不同控制方法的滚转角跟踪效果
Fig.8 Roll angle tracking effects of different control methods under white noise background
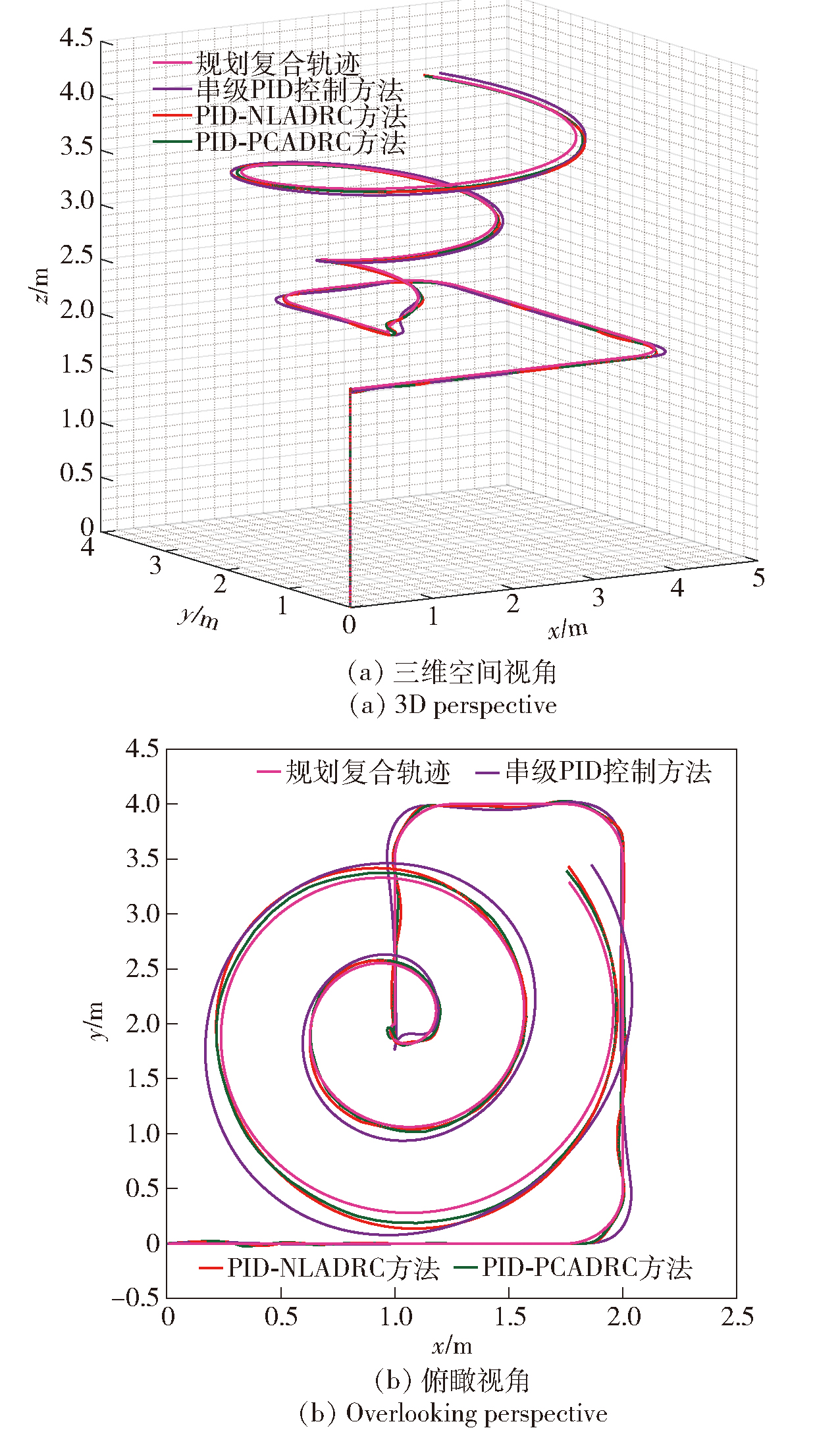
图9 无扰条件下复合轨迹跟踪曲线
Fig.9 Compound trajectory tracking curve under undisturbed condition
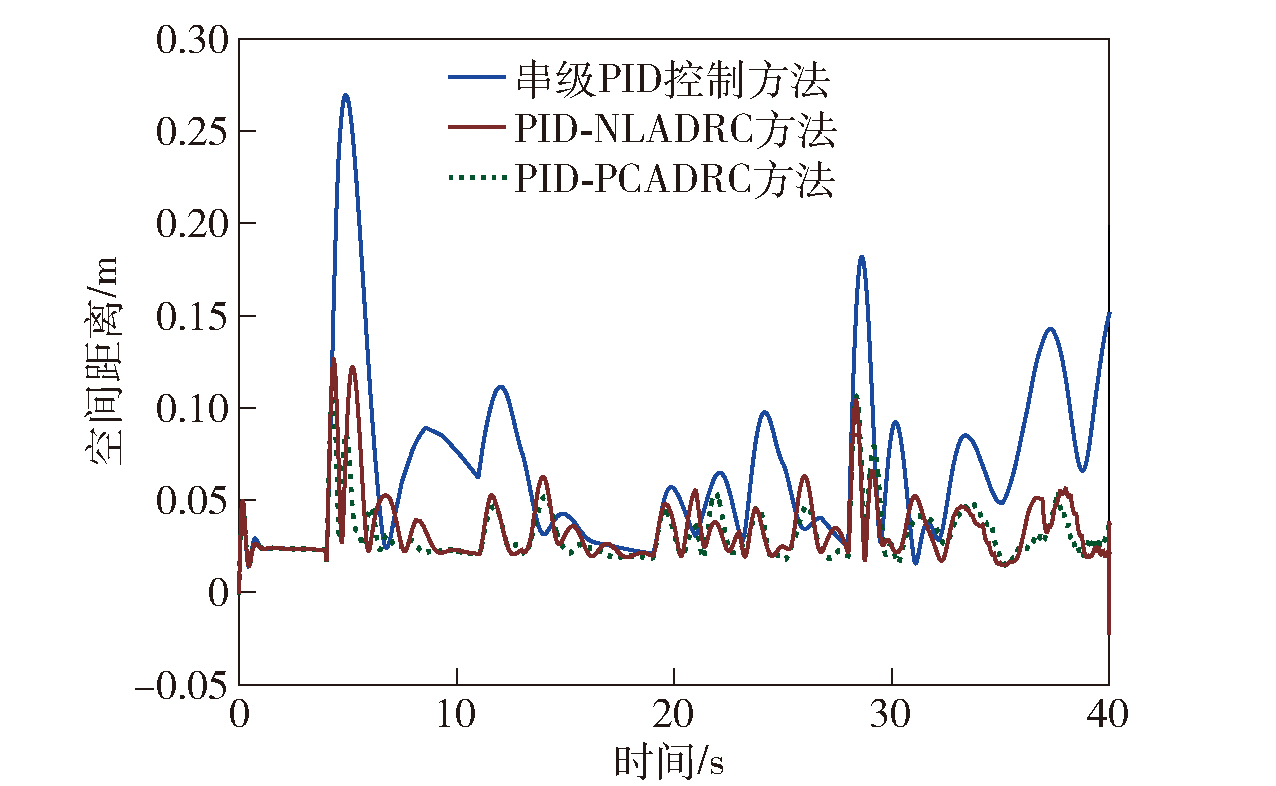
图10 无扰条件下实际轨迹点与规划轨迹点的空间距离
Fig.10 Spatial distancesamong actual trajectory points and lanned trajectory points under undisturbed conditions
| 阶段 | 方法 | 最大值/m | 均值/m | 标准差/m |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.2690 | 0.0596 | 0.0477 |
| PID-NLADRC | 0.1260 | 0.0340 | 0.0186 | |
| PID-PCADRC | 0.1110 | 0.0296 | 0.0131 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.2560 | 0.1150 | 0.0582 |
| PID-NLADRC | 0.1660 | 0.0601 | 0.0397 | |
| PID-PCADRC | 0.1060 | 0.0491 | 0.0249 | |
| 合段 | 串级PID控制 | 0.2690 | 0.0826 | 0.0590 |
| PID-NLADRC | 0.1660 | 0.0449 | 0.0320 | |
| PID-PCADRC | 0.1110 | 0.0377 | 0.0212 |
表3 无扰条件下轨迹跟踪偏差的统计量
Table 3 Statistics of trajectory tracking deviations under undisturbed conditions
| 阶段 | 方法 | 最大值/m | 均值/m | 标准差/m |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.2690 | 0.0596 | 0.0477 |
| PID-NLADRC | 0.1260 | 0.0340 | 0.0186 | |
| PID-PCADRC | 0.1110 | 0.0296 | 0.0131 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.2560 | 0.1150 | 0.0582 |
| PID-NLADRC | 0.1660 | 0.0601 | 0.0397 | |
| PID-PCADRC | 0.1060 | 0.0491 | 0.0249 | |
| 合段 | 串级PID控制 | 0.2690 | 0.0826 | 0.0590 |
| PID-NLADRC | 0.1660 | 0.0449 | 0.0320 | |
| PID-PCADRC | 0.1110 | 0.0377 | 0.0212 |
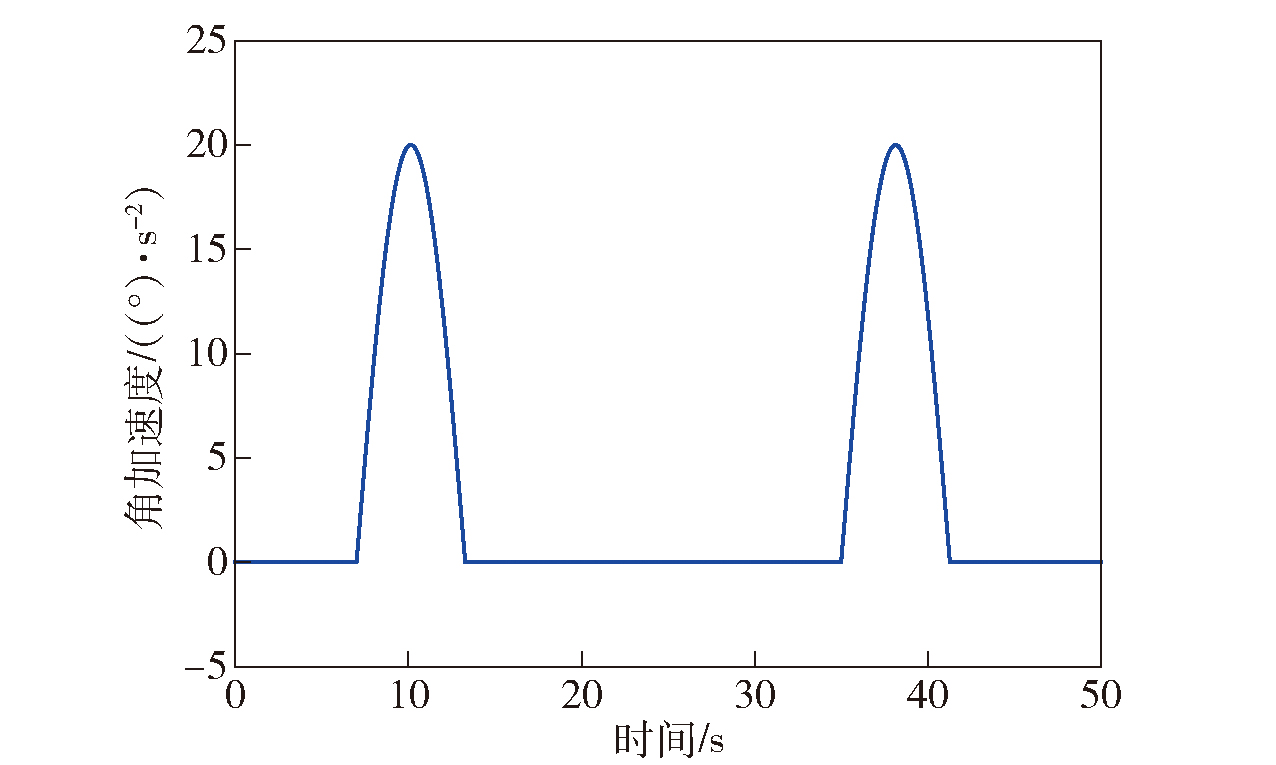
图11 风扰引起的角加速度变化
Fig.11 Change of angular acceleration caused by wind disturbance

图12 风扰条件下复合轨迹跟踪曲线
Fig.12 Composite trajectory tracking curve under wind disturbance conditions
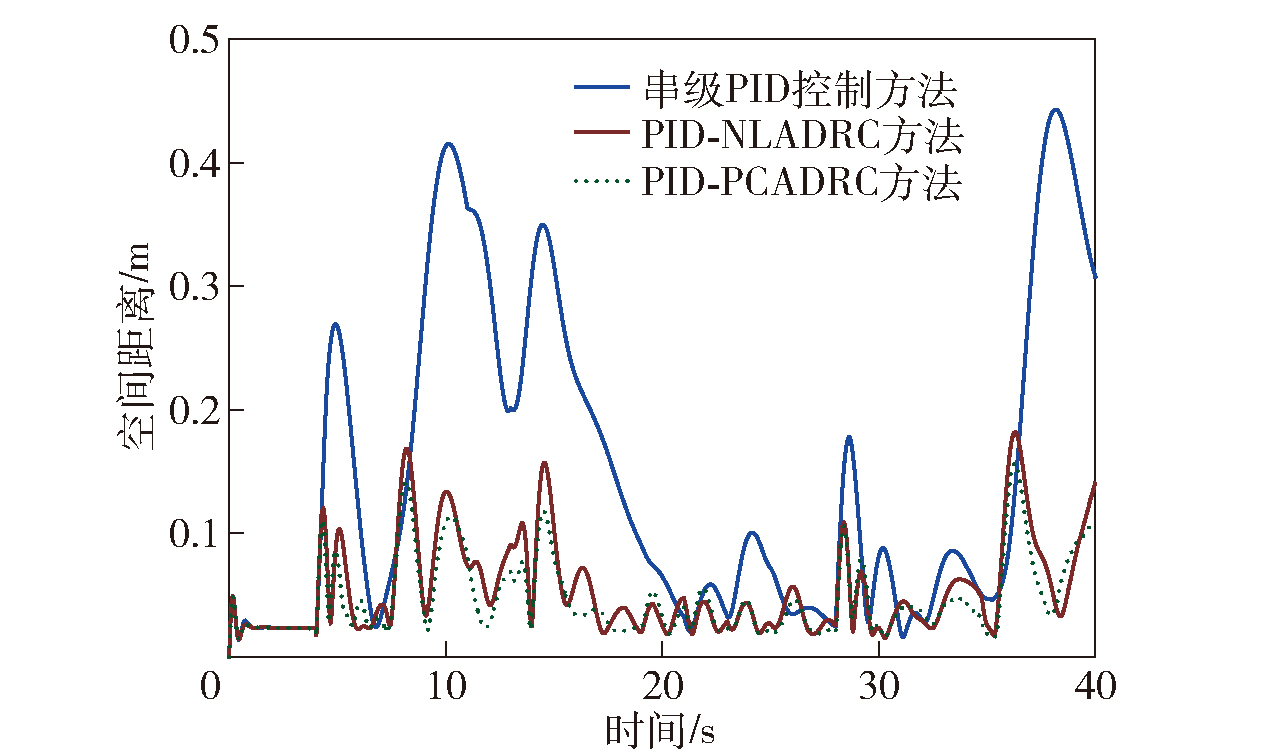
图13 风扰条件下实际轨迹点与规划轨迹点的空间距离
Fig.13 Spatial distances among actual trajectory points and planned trajectory points under wind disturbance conditions
| 阶段 | 控制策略 | 最大值 | 均值 | 标准差 |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.4150 | 0.1410 | 0.1200 |
| PID-ADRC | 0.1690 | 0.0515 | 0.0356 | |
| PID-PCADRC | 0.1420 | 0.0440 | 0.0283 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.4430 | 0.2050 | 0.1430 |
| PID-ADRC | 0.2270 | 0.0945 | 0.5730 | |
| PID-PCADRC | 0.1570 | 0.0790 | 0.0408 | |
| 合段 | 串级PID控制 | 0.4430 | 0.1680 | 0.1340 |
| PID-ADRC | 0.2270 | 0.0694 | 0.0505 | |
| PID-PCADRC | 0.1570 | 0.0586 | 0.0382 |
表4 风扰条件下轨迹跟踪偏差的统计量
Table 4 Statistics of trajectory tracking deviations under wind disturbance conditions
| 阶段 | 控制策略 | 最大值 | 均值 | 标准差 |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.4150 | 0.1410 | 0.1200 |
| PID-ADRC | 0.1690 | 0.0515 | 0.0356 | |
| PID-PCADRC | 0.1420 | 0.0440 | 0.0283 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.4430 | 0.2050 | 0.1430 |
| PID-ADRC | 0.2270 | 0.0945 | 0.5730 | |
| PID-PCADRC | 0.1570 | 0.0790 | 0.0408 | |
| 合段 | 串级PID控制 | 0.4430 | 0.1680 | 0.1340 |
| PID-ADRC | 0.2270 | 0.0694 | 0.0505 | |
| PID-PCADRC | 0.1570 | 0.0586 | 0.0382 |
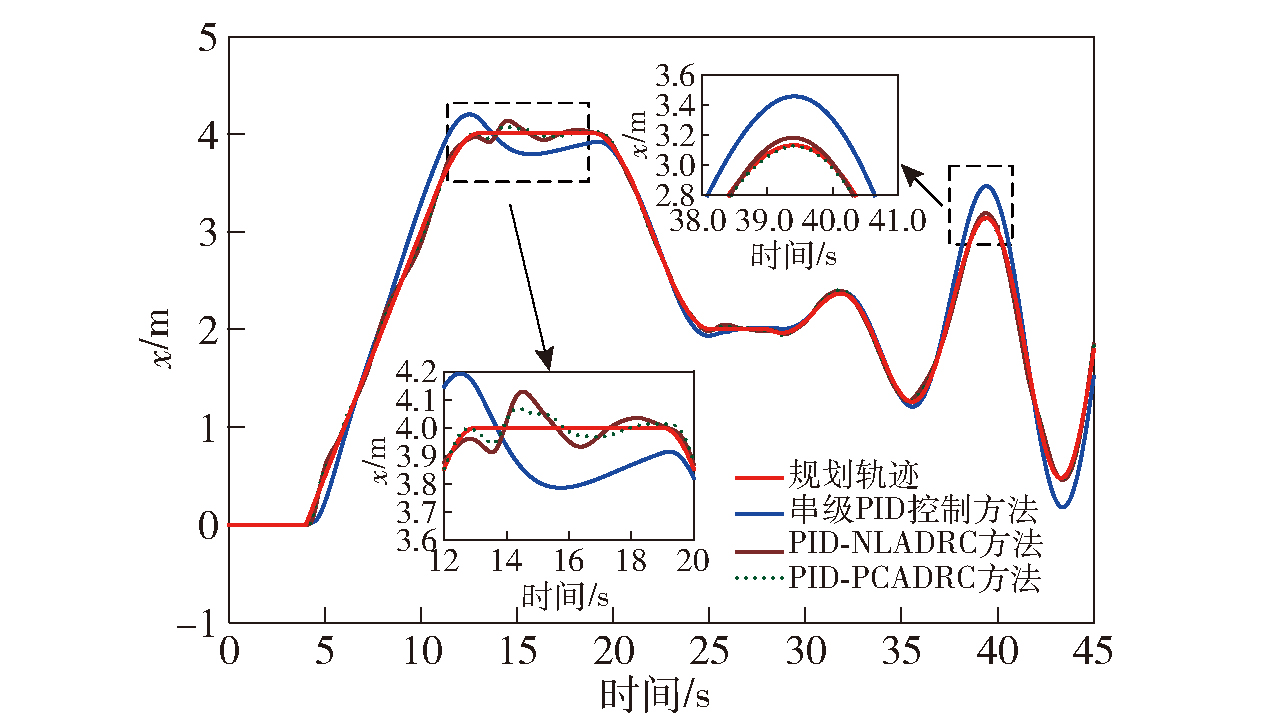
图14 干扰条件下x通道跟踪曲线
Fig.14 Tracking curve of Channel x under interference conditions
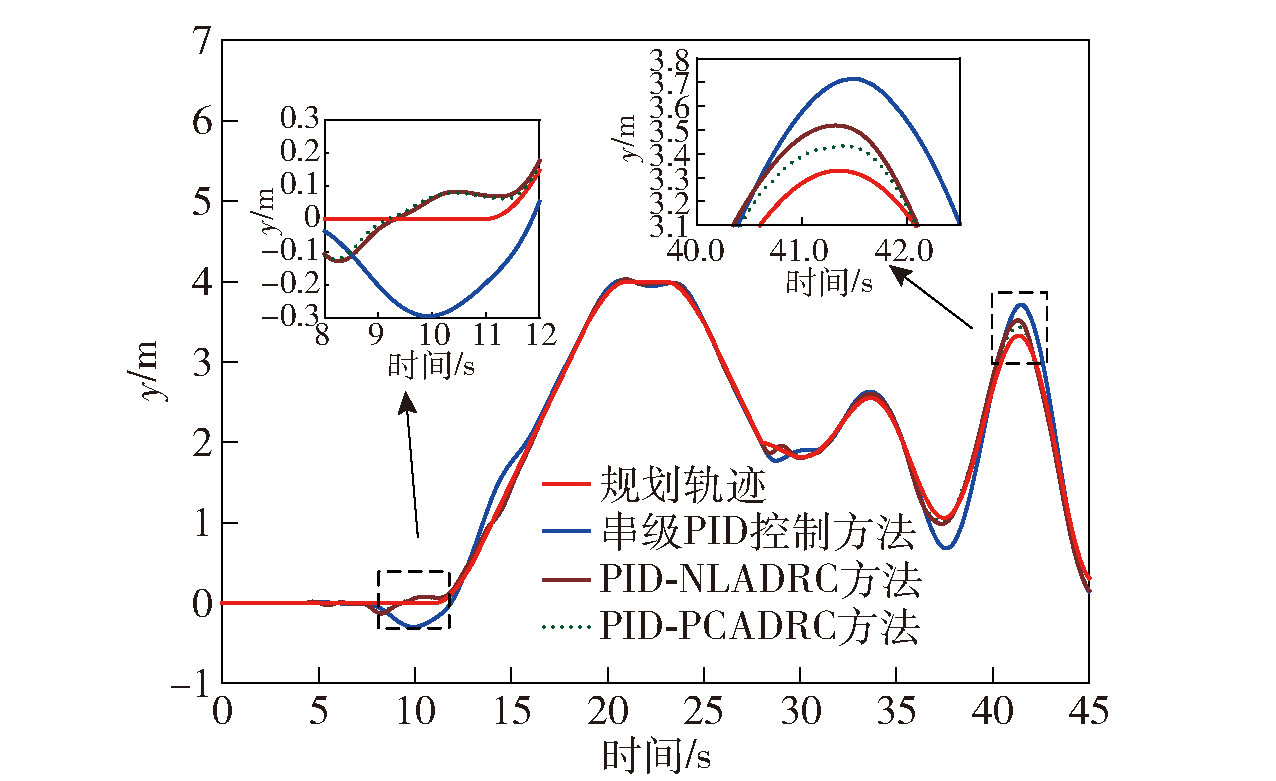
图15 干扰条件下y通道跟踪曲线
Fig.15 Tracking curve of of Channel y under interference conditions

图16 Crazyflie无人机
Fig.16 Crazyflie drone

图17 Crazyflie无人机实验环境
Fig.17 Crazyflie drone experimental environment
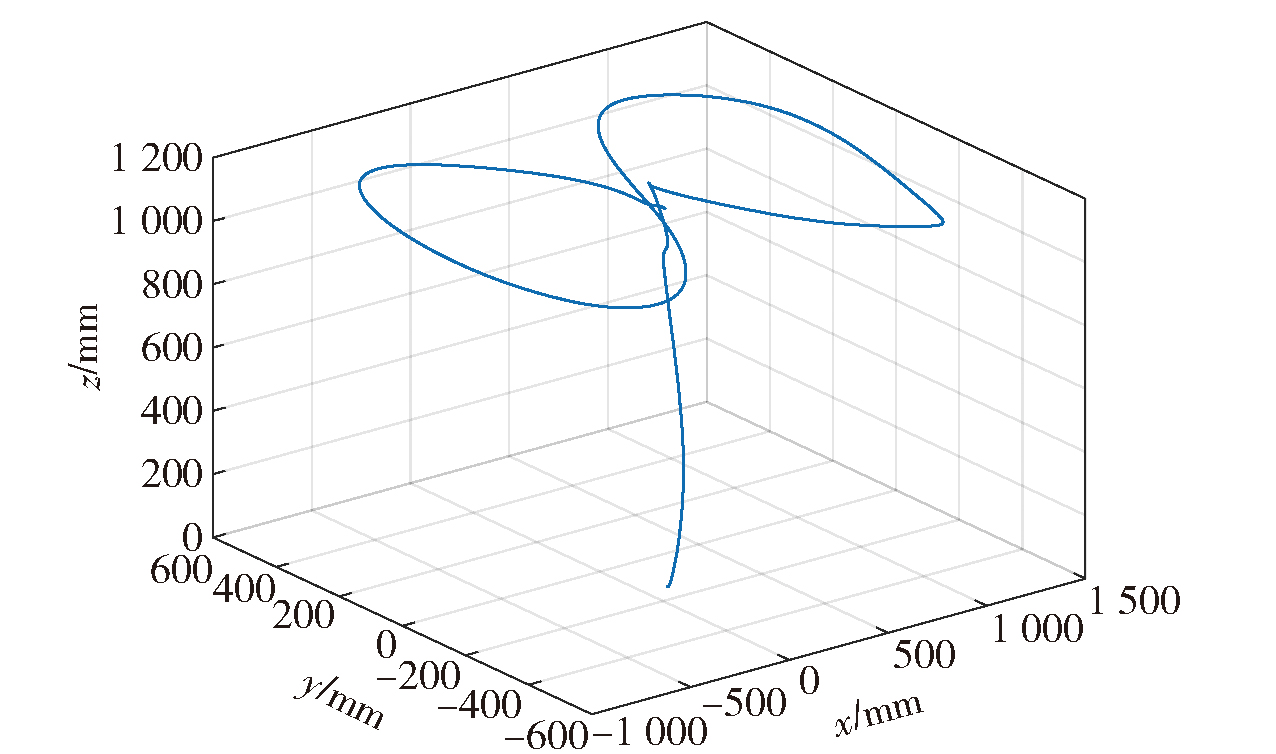
图18 NLADRC应用下的“八”字形轨迹跟踪曲线
Fig.18 Trajectory tracking curves under NLADRC application
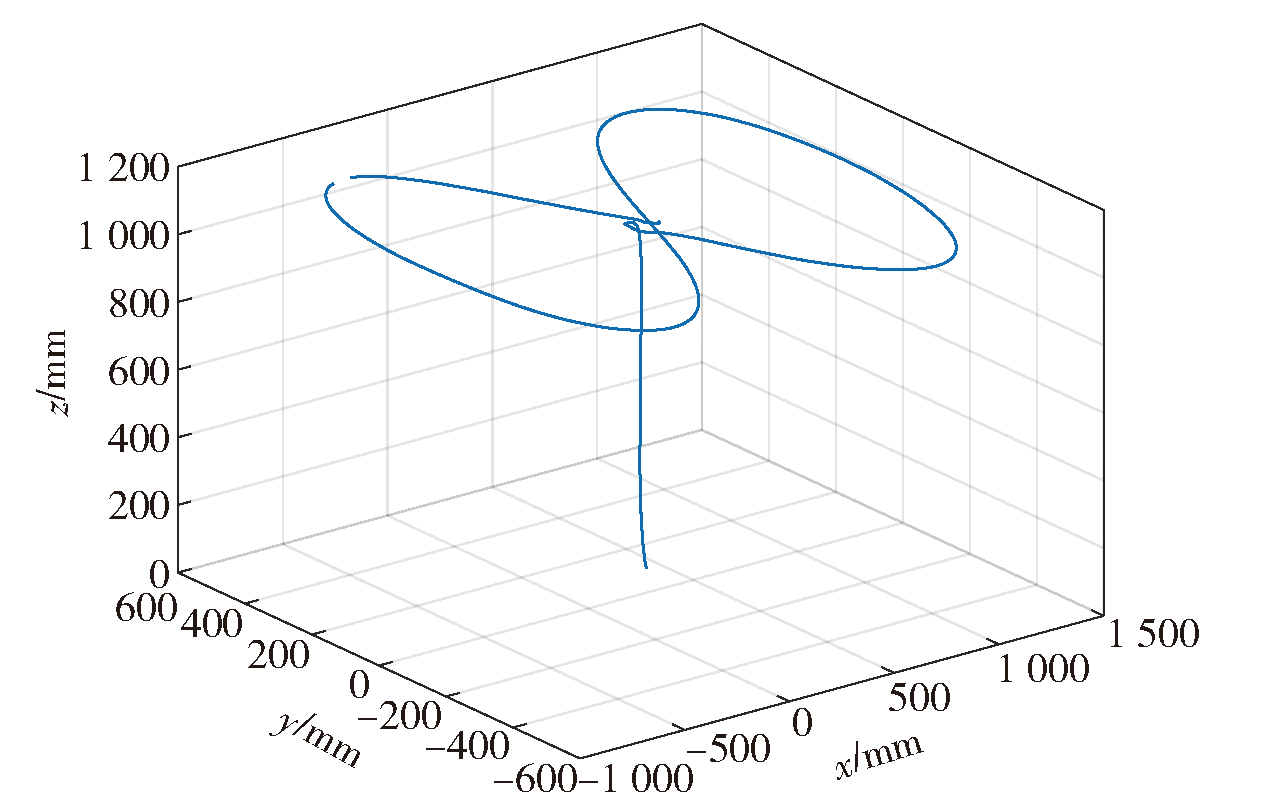
图19 PCADRC应用下的“八”字形轨迹跟踪曲线
Fig.19 Trajectory tracking curves under PCADRC application
| [1] |
修杨, 邓宏彬, 危怡然, 等. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938.
|
|
|
|
| [2] |
刚桂虎, 赵显. 小型旋翼无人机在未来城市军事行动应用中潜力评估[J]. 国防科技, 2017, 38(2): 33-37.
|
|
|
|
| [3] |
|
| [4] |
MOHAMEDO,
|
| [5] |
张智轩, 李涛, 伍鹏飞, 等. 改进混沌粒子群算法的四旋翼PID姿态控制[J]. 电光与控制, 2022, 29(3): 16-20.
|
|
|
|
| [6] |
韩京清. 自抗扰控制技术:估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 183-192.
|
|
|
|
| [7] |
吴义忠, 陈立平. 多领域物理系统的仿真优化方法[M]. 北京: 科学出版社, 2011: 56-58.
|
|
|
|
| [8] |
|
| [9] |
刘祚时, 陈飞, 徐燕生, 等. 四旋翼飞行仿真器的PID神经元网络控制器设计[J]. 机械设计与制造, 2023(1): 150-153, 158.
|
|
|
|
| [10] |
王思孝, 赵文军, 张浩, 等. 基于微分跟踪器的共轴反桨无人机串级TD-PID控制算法[J]. 浙江大学学报(工学版), 2021, 55(12): 2359-2364.
|
|
|
|
| [11] |
|
| [12] |
肖友刚, 童俊豪. 基于联合观测与前馈补偿的四旋翼无人机自抗扰控制[J]. 应用数学和力学, 2023, 44(3): 229-240.
|
|
|
|
| [13] |
石晓洁, 蔡家斌, 宋建, 等. 风干扰下无人机自抗扰控制参数自整定[J]. 组合机床与自动化加工技术, 2021(6): 67-71.
doi: 10.13462/j.cnki.mmtamt.2021.06.016 |
|
|
|
| [14] |
|
| [15] |
刘怡恒, 张和洪, 龙志强, 等. 基于改进跟踪微分器的磁浮列车悬浮控制研究[J]. 机车电传动, 2023(2): 113-122.
|
|
|
|
| [16] |
李宏扬. 跟踪微分器改进算法的应用分析[J]. 吉林大学学报(信息科学版), 2021, 39(1): 45-50.
|
|
|
|
| [17] |
张帆, 徐华中, 向云, 等. 针对含噪信号的自适应跟踪微分器改进研究[J]. 电光与控制, 2017, 24(3): 60-63, 101.
|
|
|
|
| [18] |
|
| [19] |
赵志良. 非线性自抗扰控制的收敛性[D]. 合肥: 中国科学技术大学, 2013.
|
|
|
|
| [20] |
万慧, 齐晓慧, 李杰. 基于线性矩阵不等式的线性/非线性切换自抗扰控制系统的稳定性分析[J]. 上海交通大学学报, 2022, 56(11): 1491-1501.
doi: 10.16183/j.cnki.jsjtu.2021.203 |
|
|
|
| [21] |
高志强. 自抗扰控制的传承与发展[J]. 控制理论与应用, 2023, 40: 93-95.
|
|
|
|
| [22] |
葛立明, 李宗刚, 王世伟, 等. 基于调节/观测时间的自抗扰控制器参数整定[J]. 控制与决策, 2017, 32(7): 1333-1337.
|
|
|
|
| [23] |
蔡雨晴. 非线性NLADRC控制及参数整定研究[D]. 北京: 北京化工大学, 2022.
|
|
|
| [1] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [2] | 贾一飞, 蒋朝阳. 动态可重构自适应无人车辆编队系统[J]. 兵工学报, 2024, 45(10): 3654-3673. |
| [3] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [4] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [5] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [6] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [7] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [8] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [9] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| [10] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [11] | 修杨, 邓宏彬, 危怡然, 李东方. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938. |
| [12] | 朱毅飞, 林德福, 莫雳, 叶建川. 四旋翼无人机旋翼对机身非定常气动干扰特性[J]. 兵工学报, 2022, 43(2): 410-422. |
| [13] | 王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289. |
| [14] | 李睿, 项昌乐, 王超, 范晶晶, 刘春林. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137. |
| [15] | 孙国轩, 宫新宇, 时岩, 谢继鹏, 鲁斌. 基于差分进化算法的自行高炮随动系统PID参数整定[J]. 兵工学报, 2021, 42(5): 903-912. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4