
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2836-2848.doi: 10.12382/bgxb.2022.0760
所属专题: 智能系统与装备技术
黄峰, 王威雄, 林忠麟*( ), 吴衔誉, 庄嘉权
), 吴衔誉, 庄嘉权
收稿日期:2022-08-31
上线日期:2023-02-12
通讯作者:
基金资助:
HUANG Feng, WANG Weixiong, LIN Zhonglin*(), WU Xianyu, ZHUANG Jiaquan
Received:2022-08-31
Online:2023-02-12
摘要:
无人机视觉导航仿真实验能够验证算法的鲁棒性和精确度,加快算法的迭代优化。传统的基于计算机仿真模型的硬件在环仿真实验平台难以复现真实的视觉导航飞行过程,需要设计一种高精度的用于无人机视觉导航试验的半物理仿真平台。根据四旋翼无人机的特性和仿真模型,提出一种新型的由三轴转台和三轴桁架组成的6自由度机械结构,该机械结构可以在4.0m×2.0m×1.4m的三维空间范围内真实地模拟四旋翼无人机的飞行姿态;根据设计的机械结构及其动力学特性,设计基于EtherCAT通讯的控制系统,同时实现真实物理环境飞行姿态模拟与虚拟动画空间同步飞行姿态仿真。测试结果表明:三轴转台的重复定位精度达到0.006 °,三轴桁架的重复定位精度达到0.033mm,动态误差精度达到0.04 °和0.4mm;通过室内外对比试验验证了仿真平台的有效性,表明仿真平台可满足高精度无人机视觉导航模拟的需求。
中图分类号:
黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848.
HUANG Feng, WANG Weixiong, LIN Zhonglin, WU Xianyu, ZHUANG Jiaquan. Design and Experimental Study of a Novel Semi-physical Simulation Platform for Visual Navigation of Quadrotor UAVs[J]. Acta Armamentarii, 2023, 44(9): 2836-2848.
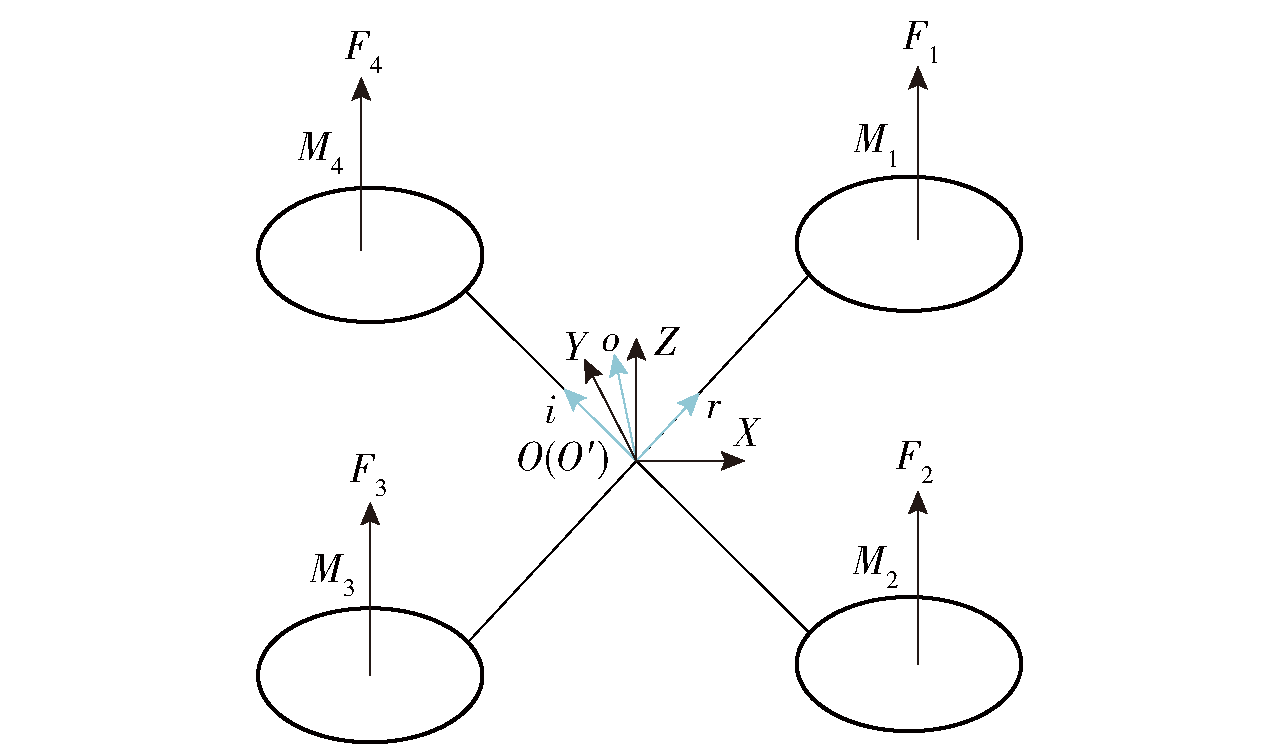
图1 四旋翼无人机力学分析
Fig.1 Mechanical analysis of a quadrotor UAV

图2 机械结构
Fig.2 Mechanical structure

图3 转台机械结构图
Fig.3 Turntable mechanical structure
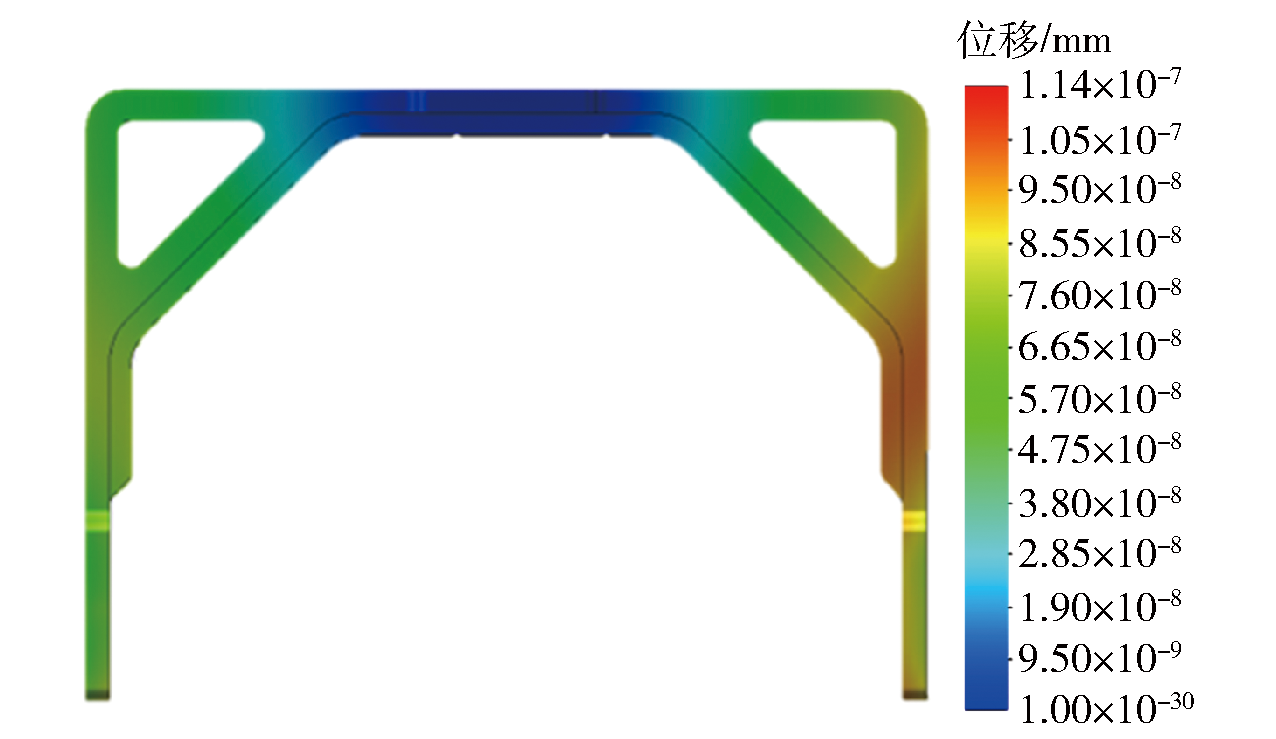
图4 偏航轴框架力学性能分析
Fig.4 Analysis of mechanical properties of the yaw shaft frame
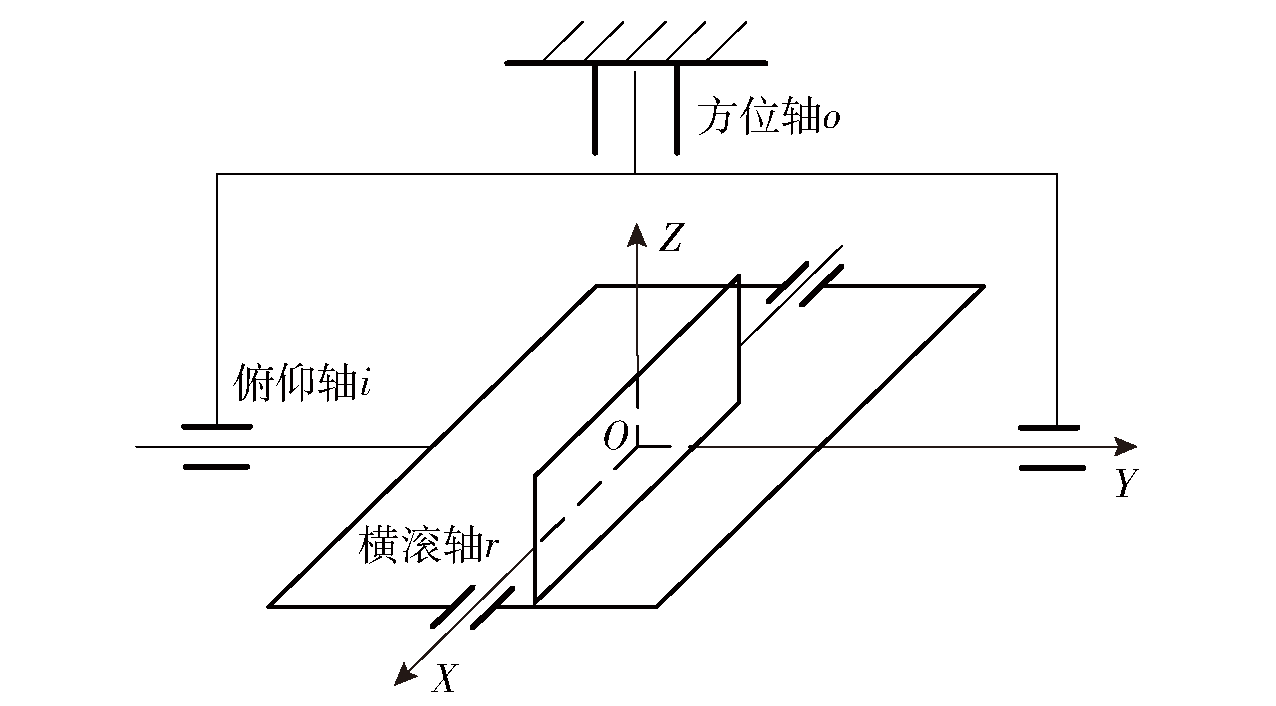
图5 三轴飞行转台结构示意图
Fig.5 Structure of the three-axis flight turntable
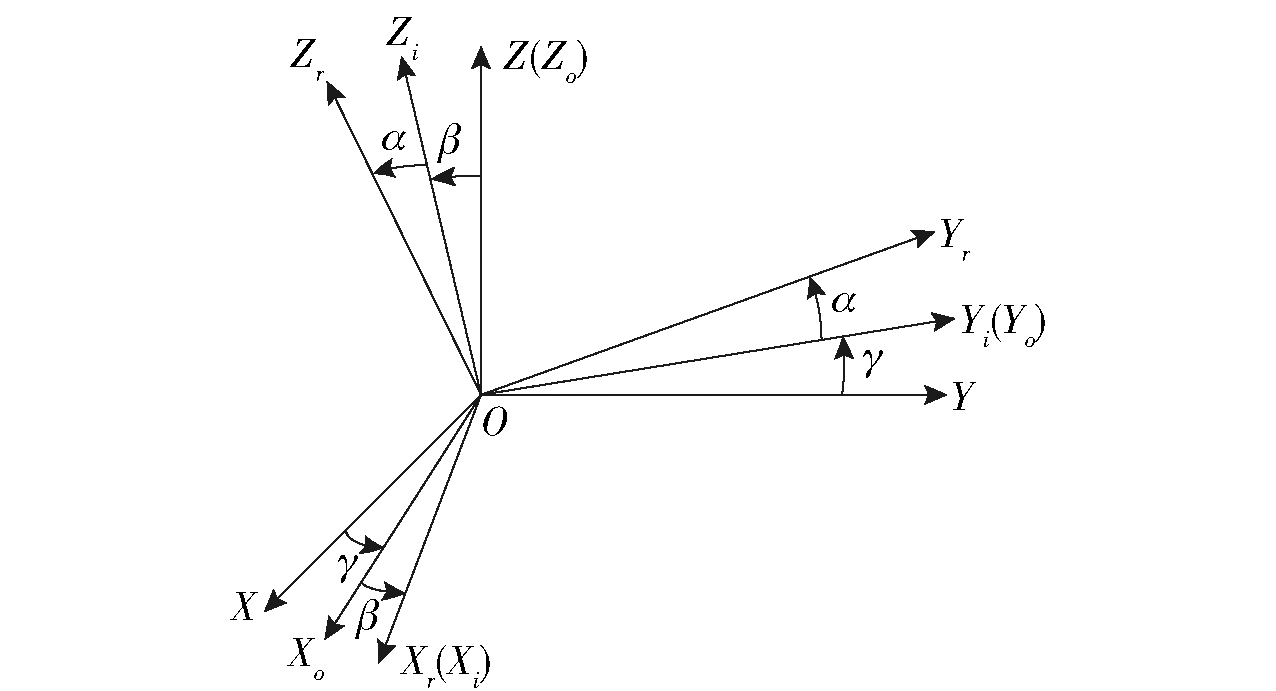
图6 三轴转台坐标变换示意图
Fig.6 Coordinate transformation of the three-axis rotary table
| 转台坐标轴 | 转动惯量J/(kg·mm2) | ||
|---|---|---|---|
| X轴 | Y轴 | Z轴 | |
| r轴 | 0.6512 | 0.6495 | 0.6295 |
| i轴 | 0.1657 | 0.1635 | 0.3191 |
| o轴 | 0.7198 | ||
表1 三轴相对各转动轴的转动惯量近似值
Table 1 Approximate of the oment of inertia of the three axes relative to each axis of rotation
| 转台坐标轴 | 转动惯量J/(kg·mm2) | ||
|---|---|---|---|
| X轴 | Y轴 | Z轴 | |
| r轴 | 0.6512 | 0.6495 | 0.6295 |
| i轴 | 0.1657 | 0.1635 | 0.3191 |
| o轴 | 0.7198 | ||
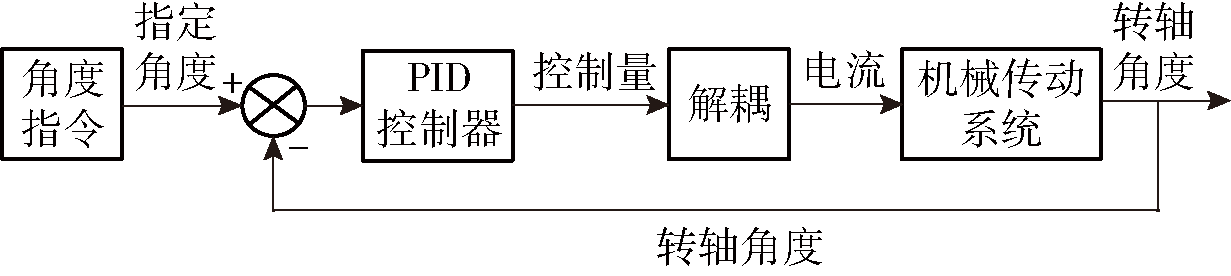
图7 解耦控制方案
Fig.7 Decoupling control schemes

图8 控制系统总体架构
Fig.8 Overall architecture of the control system
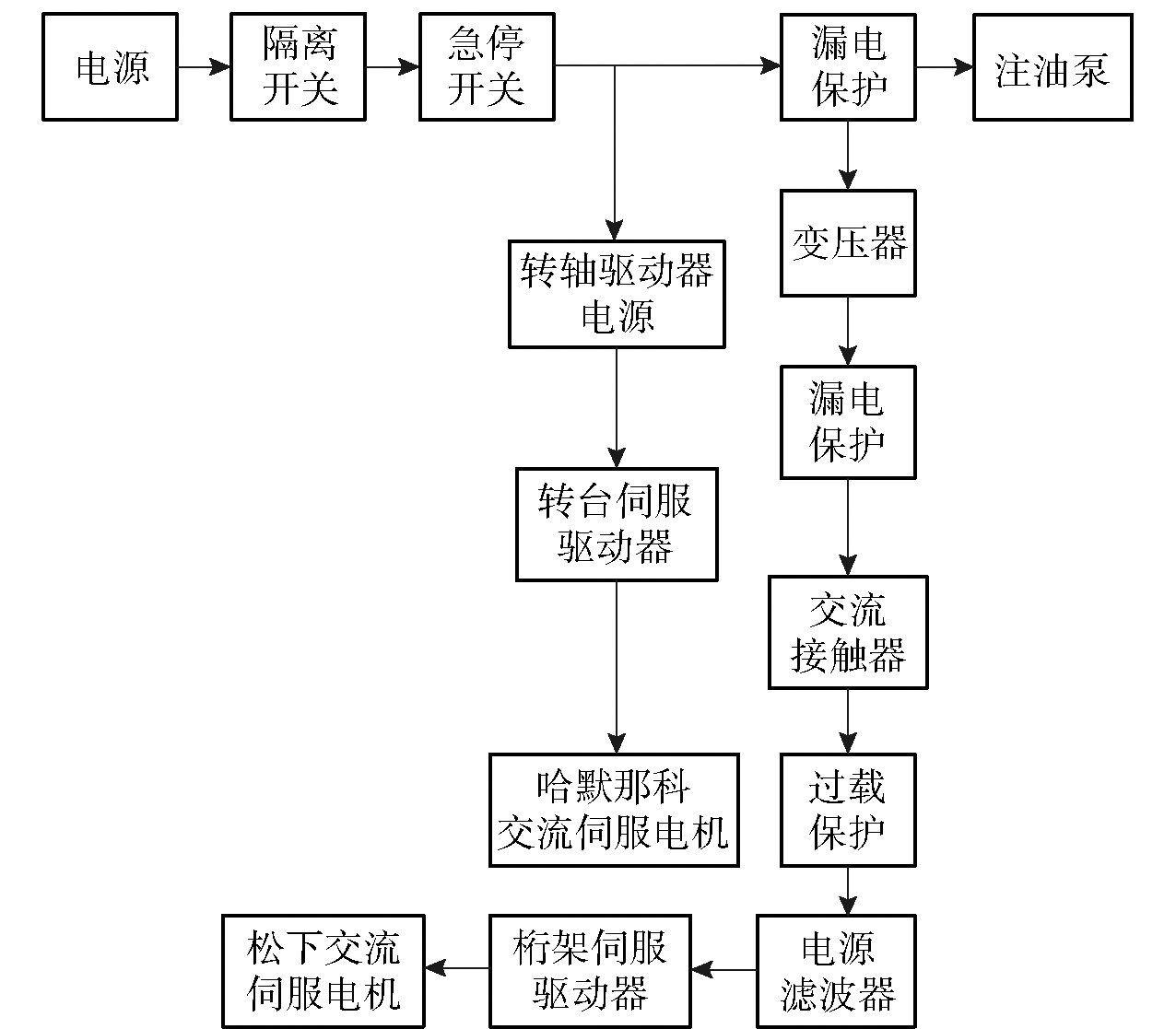
图9 电气连接示意图
Fig.9 Schematic diagram of electrical connections
| 设计参数 | X轴 | Y轴 | Z轴 |
|---|---|---|---|
| 最大速度/(mm·s-1) | 1000 | 1000 | 1000 |
| 最大加速度/(mm·s-2) | 1000 | 1000 | 1000 |
| 线性负载/N | 1643.5 | 775.1 | 2918.7 |
表2 三轴桁架主要参数
Table 2 Main parameters of the three-axis truss
| 设计参数 | X轴 | Y轴 | Z轴 |
|---|---|---|---|
| 最大速度/(mm·s-1) | 1000 | 1000 | 1000 |
| 最大加速度/(mm·s-2) | 1000 | 1000 | 1000 |
| 线性负载/N | 1643.5 | 775.1 | 2918.7 |
| 设计参数 | o轴 | r轴 | i轴 |
|---|---|---|---|
| 最大速度/((°)·s-1) | 20 | 20 | 20 |
| 最大加速度/((°)·s-2) | 20 | 20 | 20 |
| 线性负载/(kg·mm2) | 1.04 | 0.66 | 0.81 |
表3 三轴转台架主要参数
Table 3 Main parameters of the three-axis rotary table
| 设计参数 | o轴 | r轴 | i轴 |
|---|---|---|---|
| 最大速度/((°)·s-1) | 20 | 20 | 20 |
| 最大加速度/((°)·s-2) | 20 | 20 | 20 |
| 线性负载/(kg·mm2) | 1.04 | 0.66 | 0.81 |

图10 系统实物图
Fig.10 Physical diagram of the system
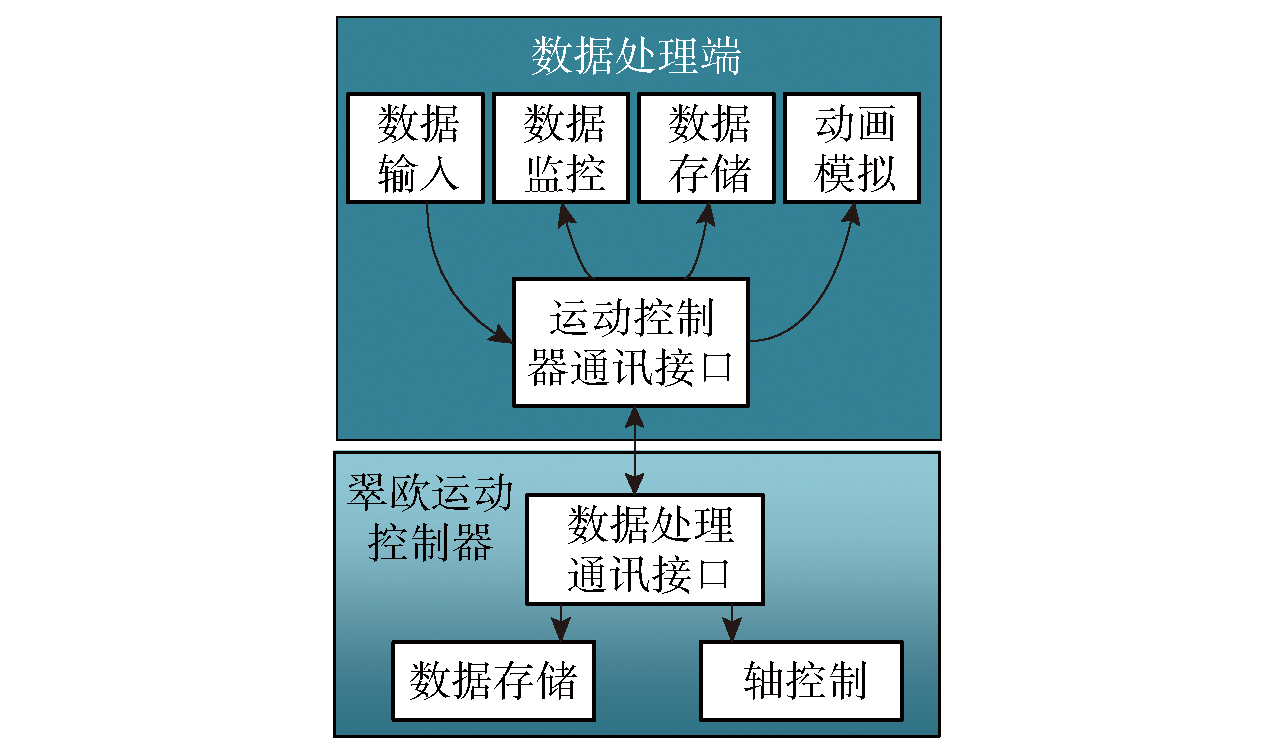
图11 软件架构
Fig.11 Software architecture

图12 实时动画模拟
Fig.12 Real-time animation simulation
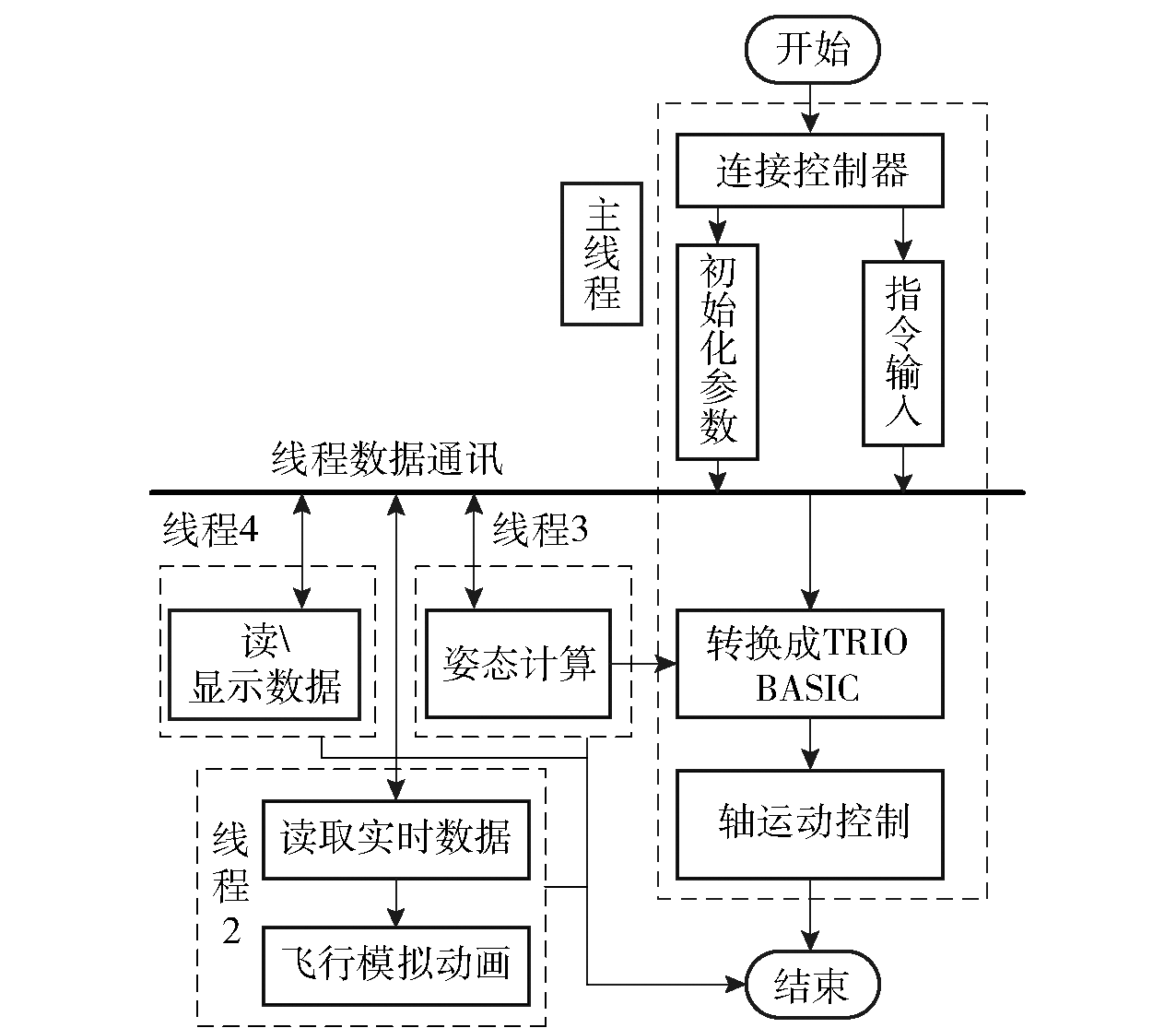
图13 软件流程图
Fig.13 Software flowchart
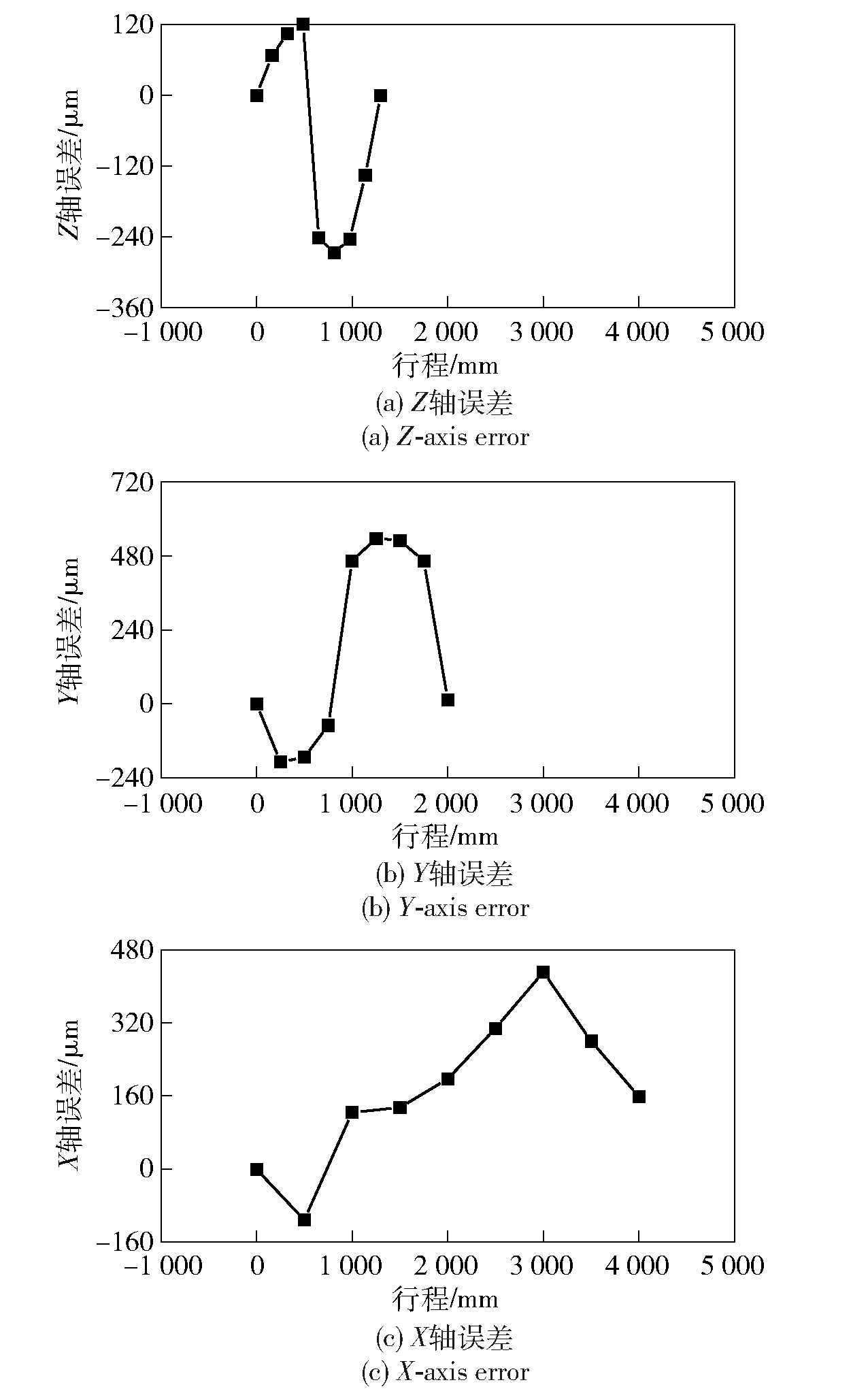
图14 三轴桁架重复定位精度
Fig.14 Accuracy of three-axis truss repeat positioning
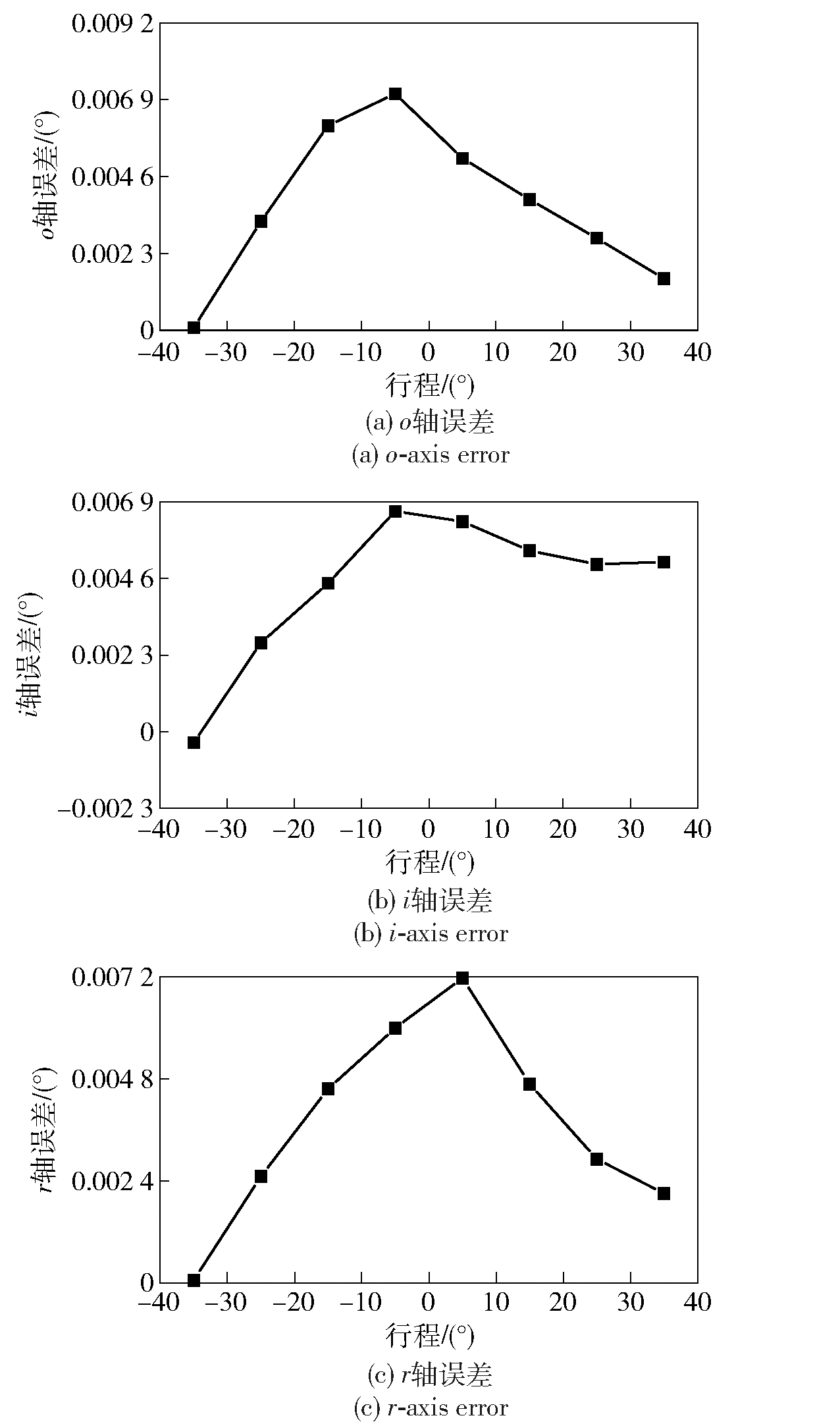
图15 三轴转台重复定位精度
Fig.15 Accuracy of three-axis truss repeat positioning
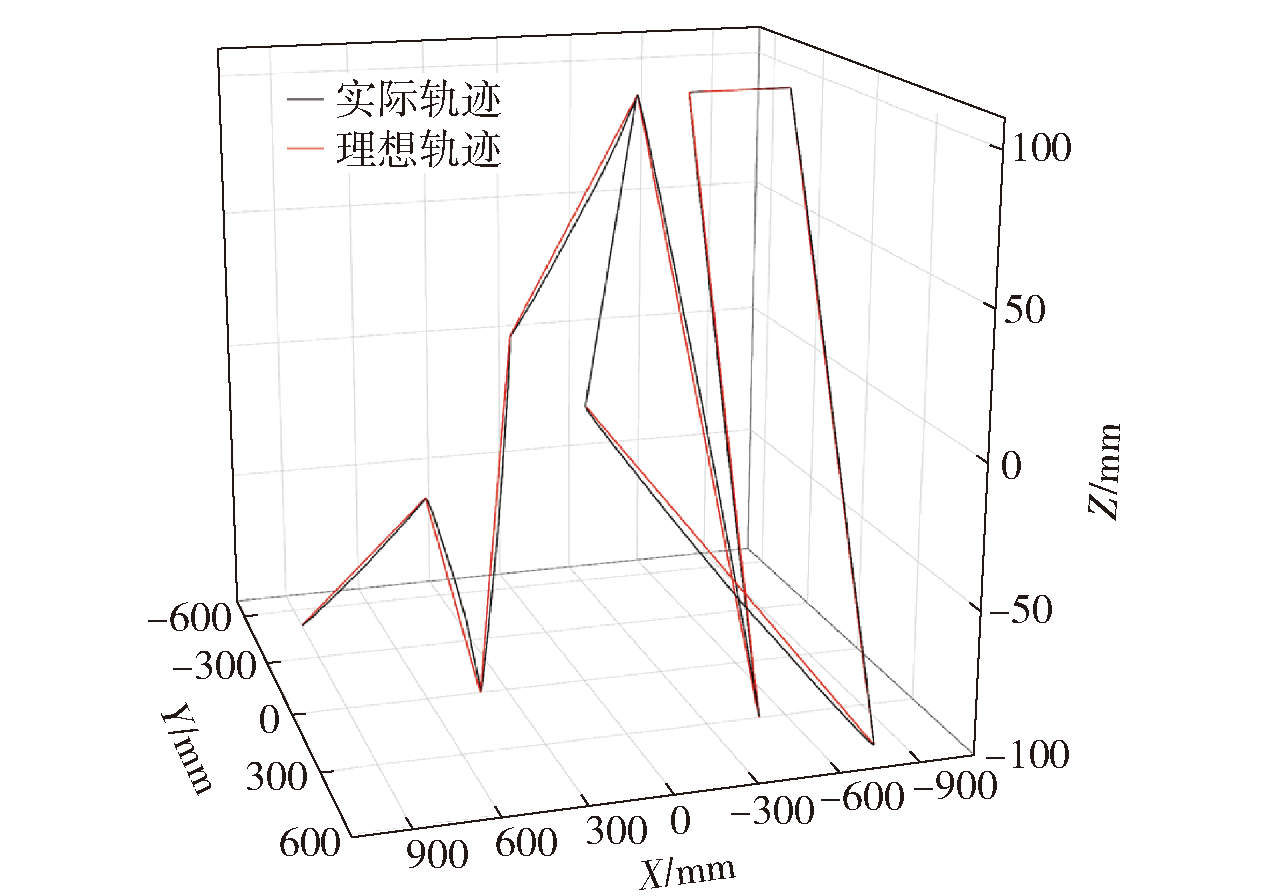
图16 三轴桁架动态轨迹图
Fig.16 Dynamic trajectory diagram of a three-axis truss
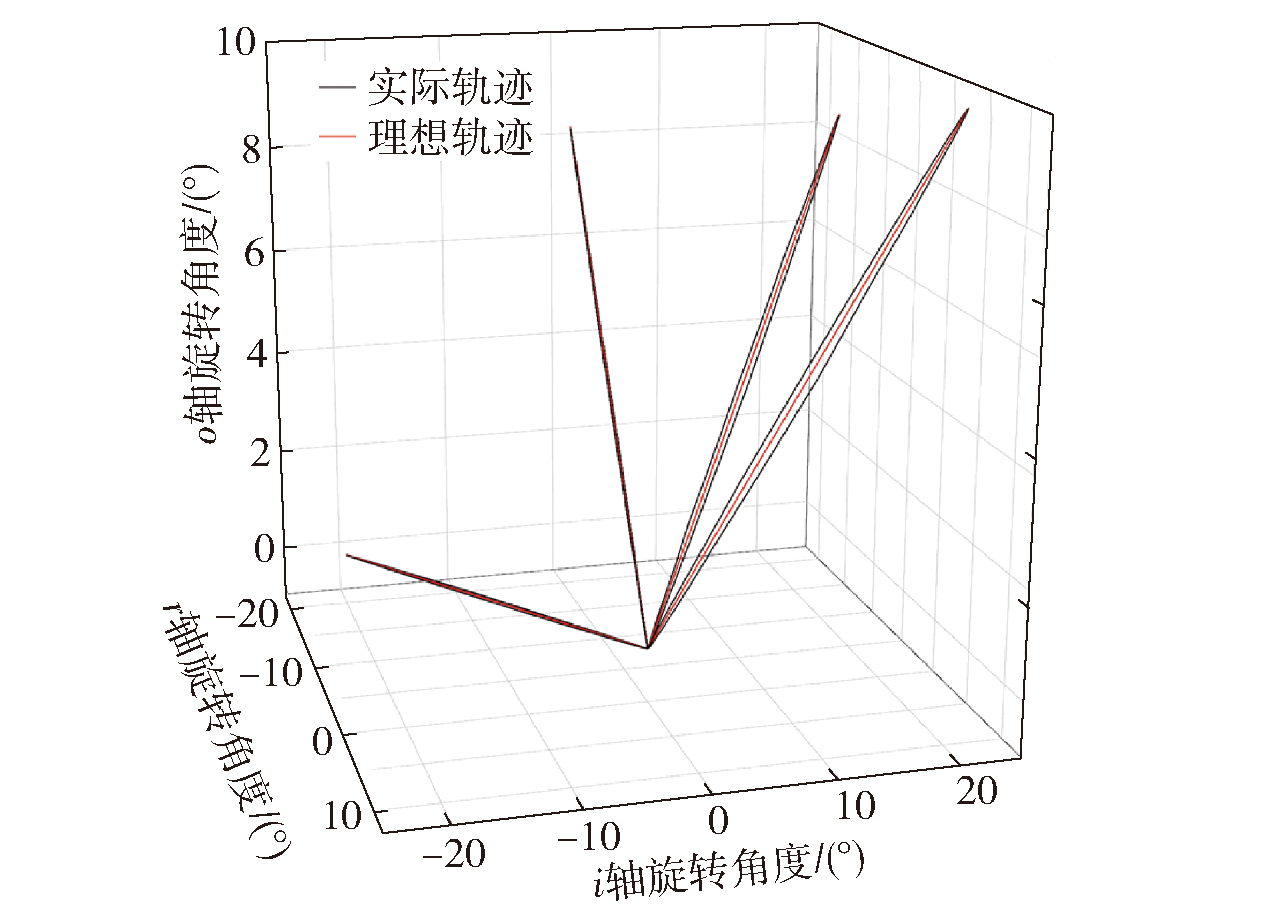
图17 三轴转台动态旋转角度图
Fig.17 Dynamic angle diagram of the three-axis rotary table
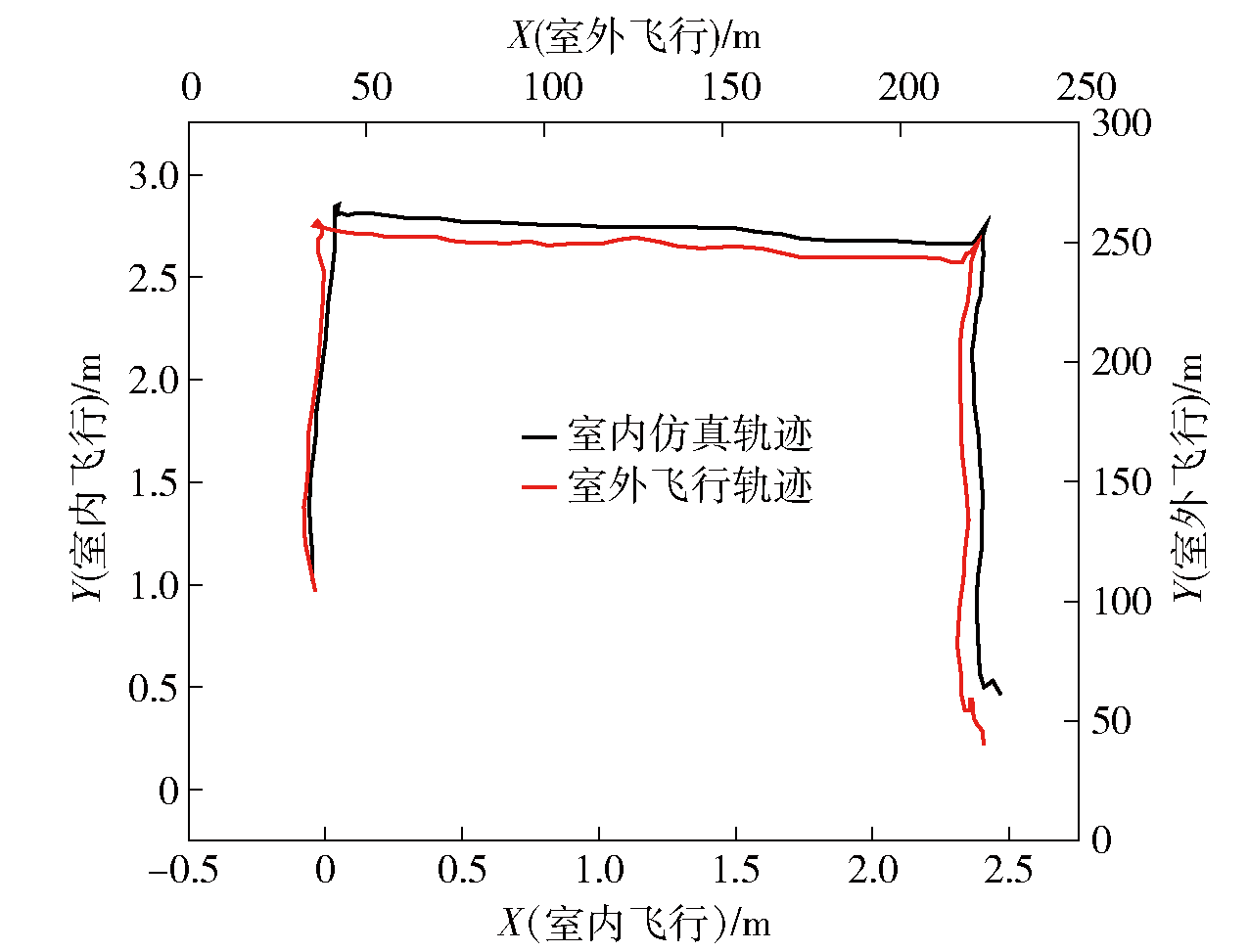
图18 仿真效果对比
Fig.18 Comparison of simulation effects
| [1] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12):2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [2] |
刘全攀, 王正杰, 王寰. 基于双目视觉-惯性导航的轻型无人机导航算法[J]. 兵工学报, 2020, 41(增刊2):241-248.
|
|
|
|
| [3] |
doi: 10.1109/Access.6287639 URL |
| [4] |
doi: 10.1109/ACCESS.2021.3123348 URL |
| [5] |
doi: 10.1016/j.matpr.2019.03.157 URL |
| [6] |
林传健, 章卫国, 史静平, 等. 无人机跟踪系统仿真平台的设计与实现[J]. 哈尔滨工业大学学报, 2020, 52(10):119-127.
|
|
|
|
| [7] |
孙旺, 刘西, 南英. 基于MFC的Vega Prime航空飞行器动态视景仿真[J]. 指挥控制与仿真, 2019, 41(5):87-94.
doi: 10.3969/j.issn.1673-3819.2019.05.018 |
|
|
|
| [8] |
|
| [9] |
钟林钢, 降晶晶, 叶超宇. 基于Unity3D的无人机集群仿真平台设计[J]. 计算机科学与应用, 2021, 11(9): 2242-2251.
|
|
doi: 10.12677/CSA.2021.119229 URL |
|
| [10] |
李军伟, 袁冬莉. 基于VxWorks的无人机半物理仿真研究[J]. 测控技术, 2008, 27(9):92-94.
|
|
|
|
| [11] |
doi: 10.1016/j.eng.2019.01.014 URL |
| [12] |
doi: 10.1016/j.sysarc.2016.11.012 URL |
| [13] |
黄瑞松, 李海凤, 刘金华, 等. 飞行器半实物仿真技术现状与发展趋势分析[J]. 系统仿真学报, 2019, 31(9): 1763-1774.
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
| [14] |
|
| [15] |
doi: 10.1016/j.actaastro.2018.03.030 URL |
| [16] |
李鹏, 张杰, 徐宏伟, 等. 低成本无人机载空地导弹姿态测量误差研究[J]. 西北工业大学学报, 2022, 40(2): 377-383.
|
|
doi: 10.1051/jnwpu/20224020377 URL |
|
| [17] |
杨宝庆, 马杰, 姚郁. 飞行器半实物仿真装备研究进展与展望[J]. 宇航学报, 2020, 41(6):657-665.
|
|
|
|
| [18] |
王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6):1283-1289.
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
| [19] |
黄志坚. 电气伺服控制技术及应用[M]. 北京: 中国电力出版社, 2016.
|
|
|
|
| [20] |
曾庆双, 王茂, 刘升才. 三轴转台框架间动力学耦合及解耦研究[J]. 中国惯性技术学报, 1997(3):44-49.
|
|
|
| [1] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [2] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [3] | 修杨, 邓宏彬, 危怡然, 李东方. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938. |
| [4] | 朱毅飞, 林德福, 莫雳, 叶建川. 四旋翼无人机旋翼对机身非定常气动干扰特性[J]. 兵工学报, 2022, 43(2): 410-422. |
| [5] | 王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289. |
| [6] | 叶建川, 王江, 梁熠, 宋韬, 吴则良, 徐超. 四旋翼无人机前飞模态特性[J]. 兵工学报, 2021, 42(11): 2476-2490. |
| [7] | 关震宇, 李杰, 杨欢, 徐蓓蓓, 刘畅. 基于直线稀疏光流场的微小型无人机姿态信息估计方法研究[J]. 兵工学报, 2014, 35(11): 1851-1859. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4