
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (10): 3654-3673.doi: 10.12382/bgxb.2023.0879
贾一飞1, 蒋朝阳2,*( )
)
收稿日期:2023-09-06
上线日期:2024-10-28
通讯作者:
JIA Yifei1, JIANG Chaoyang2,*()
Received:2023-09-06
Online:2024-10-28
摘要:
为研究无人车编队系统的编队保持、队形重构及队形变换功能,提出一种混合式领航跟随策略,以降低对领航车的依赖并确保编队完整性。开发基于车间(Vehicle to Vehicle,V2V)通信的跟随车独立避障功能,并设计了实时管理编队成员属性并支持人机交互的编队节点管理系统。提出一种三维空间下的三次样条曲线动态扩展轨迹规划方法,结合V2V通信获取前车位姿信息生成跟随轨迹并实现避障。利用Frenet坐标系解耦车距保持与轨迹跟踪问题,采用PID控制器和线性二次调节(Linear Quadratic Regulator,LQR)控制器分别进行纵向控制和横向轨迹跟踪。研究结果表明:所搭建的仿真环境可快速验证方法性能,显示该方法具有良好的性能;通过实车验证了车辆编队系统的3种功能,通过车距稳定保持,证实所提方法具备良好实时性,能够实现多车编队的有效跟随,通过多种队形的变换以及成员入队离队场景,显示出高度的智能拓展性和适应性。
中图分类号:
贾一飞, 蒋朝阳. 动态可重构自适应无人车辆编队系统[J]. 兵工学报, 2024, 45(10): 3654-3673.
JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System[J]. Acta Armamentarii, 2024, 45(10): 3654-3673.

图1 编队协同等级分类
Fig.1 Class classification of formation cooperation
| 控制架构 | 优点 | 缺点 |
|---|---|---|
| 集中式 | 结构简单便于设计;协调能力强;全局最优 | 容错性差,过于依赖中央处理单元;计算量大,实时性差 |
| 分布式 | 环境适应性强,行为灵活;计算量小,实时性强 | 局部最优;性能严重依赖通信质量;整体协调能力弱 |
| 混合式 | 协调能力强;全局最优;环境适应性强 | 实现难度大,设计复杂 |
表1 多车编队控制架构优缺点
Table 1 Advantages and disadvantages of multi-vehicle formation control architecture
| 控制架构 | 优点 | 缺点 |
|---|---|---|
| 集中式 | 结构简单便于设计;协调能力强;全局最优 | 容错性差,过于依赖中央处理单元;计算量大,实时性差 |
| 分布式 | 环境适应性强,行为灵活;计算量小,实时性强 | 局部最优;性能严重依赖通信质量;整体协调能力弱 |
| 混合式 | 协调能力强;全局最优;环境适应性强 | 实现难度大,设计复杂 |

图2 虚拟结构法
Fig.2 Virtual structure approach

图3 基于行为法
Fig.3 Behaviour-based approach

图4 领航跟随法
Fig.4 Leading-following method
| 方法 | 保持 | 避障 | 重构 | 抗通信 | 实时性 |
|---|---|---|---|---|---|
| 虚拟结构法 | 优 | 差 | 差 | 差 | 差 |
| 基于行为法 | 差 | 优 | 良 | 良 | 优 |
| 领航跟随法 | 优 | 差 | 良 | 差 | 优 |
| 图论法 | 优 | 良 | 优 | 差 | 差 |
| 人工势场法 | 良 | 优 | 差 | 优 | 优 |
表2 不同编队策略应对主要编队问题的能力
Table 2 Ability of different formation strategies to deal with major formation problems
| 方法 | 保持 | 避障 | 重构 | 抗通信 | 实时性 |
|---|---|---|---|---|---|
| 虚拟结构法 | 优 | 差 | 差 | 差 | 差 |
| 基于行为法 | 差 | 优 | 良 | 良 | 优 |
| 领航跟随法 | 优 | 差 | 良 | 差 | 优 |
| 图论法 | 优 | 良 | 优 | 差 | 差 |
| 人工势场法 | 良 | 优 | 差 | 优 | 优 |

图5 Frenet坐标系与笛卡尔坐标系对照
Fig.5 Contrast between Frenet coordinate system and Cartesian coordinate system
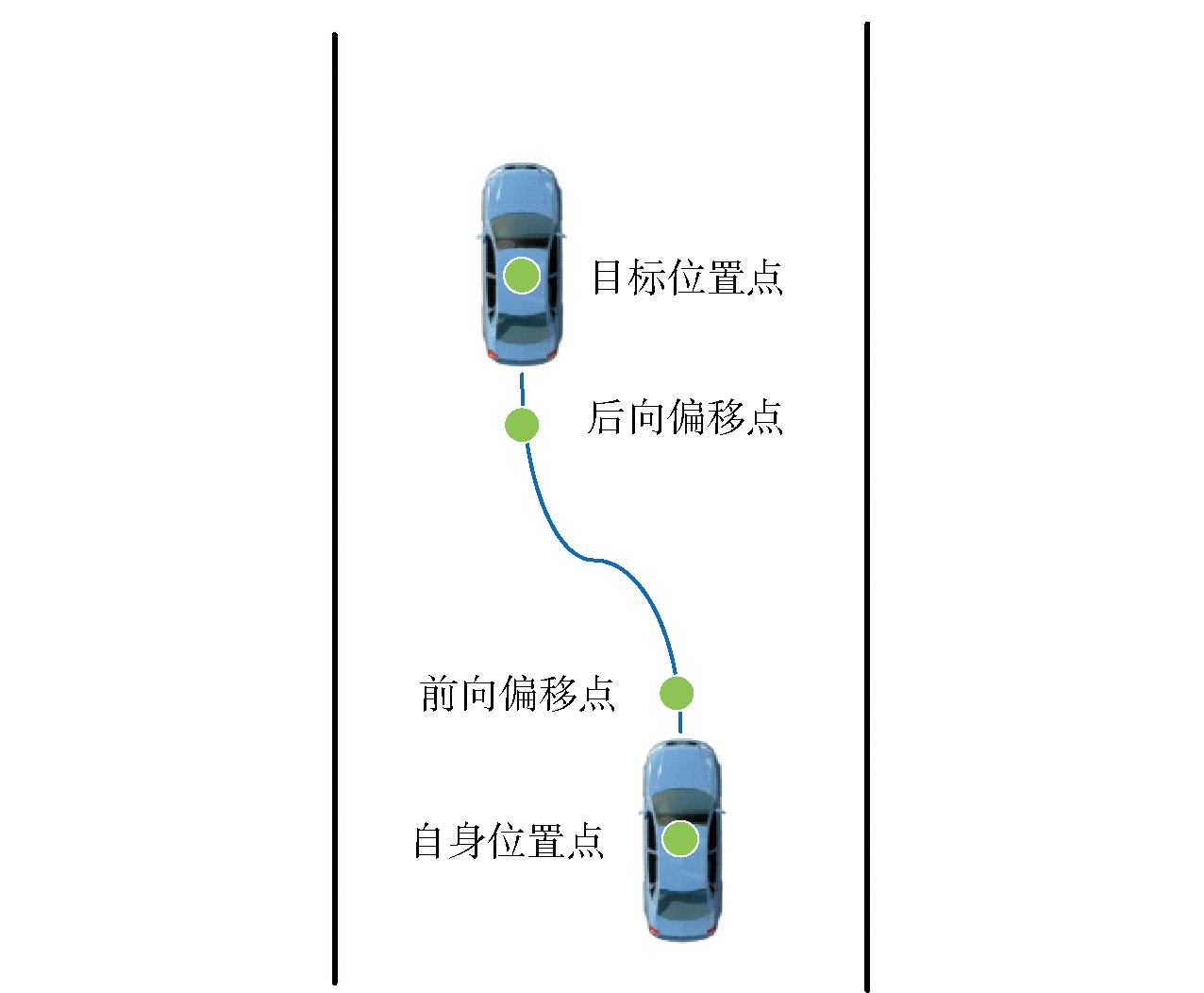
图6 基本样条曲线控制点
Fig.6 Control points of basic spline curve

图7 样条曲线的动态扩展
Fig.7 Dynamic extension of spline curves

图8 Frenet坐标系下的纵向车距
Fig.8 Longitudinal gap in Frenet coordinate system

图9 车辆横向自行车模型
Fig.9 Vehicle lateral bicycle model

图10 横向误差模型
Fig.10 Lateral error model

图11 节点管理系统
Fig.11 Node management system

图12 成员离队场景示意图
Fig.12 Schematic diagram of member departure scenario

图13 成员离队流程
Fig.13 Member departure flowchart

图14 成员入队场景示意图
Fig.14 Scenario of members joinning the vehicle formation

图15 成员入队流程
Fig.15 Flowchart of members joinning the vehicle formation

图16 自适应队形生成示意图
Fig.16 Schematic diagram of adaptive formation generation

图17 监控操纵界面
Fig.17 Monitoring and manipulating interface
| 参数 | 数值 |
|---|---|
| 起始间隔/m | 1.0 |
| 期望车间距/m | 1.5 |
| 最大车速/(m·s-1) | 0.8 |
表3 编队保持仿真参数表
Table 3 Parameter table of formation keeping simulation
| 参数 | 数值 |
|---|---|
| 起始间隔/m | 1.0 |
| 期望车间距/m | 1.5 |
| 最大车速/(m·s-1) | 0.8 |

图18 无障碍环境下编队轨迹
Fig.18 Formation trajectories in obstacle-free environment

图19 无障碍环境编队车间距误差
Fig.19 Gap errors of vehicles in obstacle-free environment

图20 无障碍环境编队实时速度
Fig.20 Speed profile of vehicle formation in obstacle-free environment

图21 编队保持速度对比
Fig.21 Comparison of the speed profiles of formation keeping

图22 编队保持间距误差对比
Fig.22 Comparison of spap errors of formation keeping

图23 障碍物环境下编队轨迹
Fig.23 Formation trajectory in obstacle environment

图24 障碍物环境编队实时车间距误差
Fig.24 Gap errors of vehicles in obstacle environment

图25 障碍物环境编队实时速度
Fig.25 Speed profile of vehicle formation in obstacle environment

图26 传统领航跟随法障碍区域行驶
Fig.26 Driving of vehicle formation presented in the traditional leading-following method in the obstacle area

图27 本文方法障碍区域行驶
Fig.27 Driving of vehicle formation presented in the proposed method in the obstacle area
| 参数 | 数值 |
|---|---|
| 起始间隔/m | 1.0 |
| 期望车间距/m | 1.5 |
| 巡航车速/(m·s-1) | 0.3 |
表4 队形重构仿真参数
Table 4 Parameter table of formation reconfiguration simulation
| 参数 | 数值 |
|---|---|
| 起始间隔/m | 1.0 |
| 期望车间距/m | 1.5 |
| 巡航车速/(m·s-1) | 0.3 |

图28 队形重构车间距误差
Fig.28 Gap error of vehicles in formation reconfiguration

图29 队形重构速度
Fig.29 Speed profile in formation reconfiguration

图30 队形重构场景
Fig.30 Formation changing scenario diagram

图31 保护型队形变换场景
Fig.31 Protection formation changing scenario

图32 保护型队形数据
Fig.32 Protective formation changing scenario data graph

图33 雁型队形变换场景
Fig.33 Geese-flying formation changing scenario

图34 雁型队形数据
Fig.34 Changing curves of geese-flying formation

图35 连续队形变换场景
Fig.35 Continuous formation change scene

图36 实验场地
Fig.36 Experimental site
| 参数 | 数值 |
|---|---|
| 期望车间距/m | 1.5 |
| 人工平均巡航车速/(m·s-1) | 0.3 |
| 出入队阶段临时间距/m | 4. |
| 汇入横向误差判断阈值/m | 0.2 |
| 汇入横摆角判断阈值/(°) | 15 |
表5 队形重构实验参数
Table 5 Parameter table of experimental formation reconfiguration
| 参数 | 数值 |
|---|---|
| 期望车间距/m | 1.5 |
| 人工平均巡航车速/(m·s-1) | 0.3 |
| 出入队阶段临时间距/m | 4. |
| 汇入横向误差判断阈值/m | 0.2 |
| 汇入横摆角判断阈值/(°) | 15 |

图37 队形重构场景实验数据
Fig.37 Experimental data graph of formation reconfiguration scenario

图38 队形变换场景实验数据
Fig.38 Experimental data graph of formation changing scenario
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
doi: S0019-0578(17)30466-4 pmid: 28689700 |
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [1] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [2] | 胡砚洋, 何凡, 白成超. 高超声速飞行器末制导段协同避障决策方法[J]. 兵工学报, 2024, 45(9): 3147-3160. |
| [3] | 王培臣, 闫循良, 南汶江, 李新国. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7): 2294-2305. |
| [4] | 周浩, 暴小鹏, 张洪刚. 无人机自抗扰控制的调相补偿改进设计与抑扰实现[J]. 兵工学报, 2024, 45(10): 3619-3630. |
| [5] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [6] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [7] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [8] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [9] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [10] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [11] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [12] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [13] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [14] | 李作轩, 贾良跃, 郝佳, 王超, 王国新, 明振军, 阎艳. 基于多工况关联的无人车辆车身结构轻量化优化设计[J]. 兵工学报, 2023, 44(11): 3529-3542. |
| [15] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4