
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2802-2813.doi: 10.12382/bgxb.2022.1051
所属专题: 智能系统与装备技术
杨加秀, 李新凯*( ), 张宏立, 王昊
), 张宏立, 王昊
收稿日期:2022-11-12
上线日期:2023-04-17
通讯作者:
基金资助:
YANG Jiaxiu, LI Xinkai*(), ZHANG Hongli, WANG Hao
Received:2022-11-12
Online:2023-04-17
摘要:
针对系统模型动态不确定和受外部干扰的四旋翼无人机位置轨迹跟踪控制问题,提出一种新的基于积分强化学习的鲁棒轨迹跟踪控制方法。建立四旋翼无人机原系统与参考轨迹的增广系统,将四旋翼无人机的鲁棒轨迹跟踪问题转化为镇定问题。通过使用带有折扣因子的价值函数,将无人机增广系统的鲁棒镇定问题转化为四旋翼无人机的最优控制问题,从而兼顾到四旋翼无人机的跟踪误差和整体性能。基于积分强化学习方法,构建了单网络演员-评论家结构对最优价值函数进行估计,进而实现对四旋翼无人机控制器的在线求解。对四旋翼无人机系统跟踪误差的稳定性及单网络结构权值的收敛性进行了严格的数学证明,仿真结果验证了所设计控制方案的优越性和鲁棒性。
中图分类号:
杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813.
YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning[J]. Acta Armamentarii, 2023, 44(9): 2802-2813.

图1 四旋翼无人机的模型示意图
Fig.1 Quadrotor UAV model

图2 算法2流程图
Fig.2 Flowchart of Algorithm 2

图3 基于演员-评论家结构的系统控制框图
Fig.3 Control block diagram of the system based on the actor-critic structure

图4 算法2基于神经网络在线实现的伪代码
Fig.4 Algorithm 2 pseudo-code for online implementation based on neural networks
| 参数 | 标称值 | 参数 | 标称值 |
|---|---|---|---|
| bx | 8 | a1x,a2x | 0 |
| by | 4.2 | a4x,a5x | 0 |
| bψ | 3.5 | a1y,a2y | 0 |
| bz | 9.5 | a4y,a5y | 0 |
| a3x | 9.8 | a1ψ,a2ψ | 0 |
| a3y | 9.8 | a1z,a2z | 0 |
表1 四旋翼无人机模型的标称参数
Table 1 Nominal parameters of the quadrotor UAV model
| 参数 | 标称值 | 参数 | 标称值 |
|---|---|---|---|
| bx | 8 | a1x,a2x | 0 |
| by | 4.2 | a4x,a5x | 0 |
| bψ | 3.5 | a1y,a2y | 0 |
| bz | 9.5 | a4y,a5y | 0 |
| a3x | 9.8 | a1ψ,a2ψ | 0 |
| a3y | 9.8 | a1z,a2z | 0 |

图5 算例1中神经网络权重的收敛性
Fig.5 Convergence of weights of NNs in Case 1

图6 算例1中无人机IRL过程中的三维轨迹跟踪曲线
Fig.6 3-D tracking trajectory of the UAV during IRL learning in Case 1

图7 算例1中IRL学习过程中的位置跟踪
Fig.7 Position tracking during IRL learning Case 1

图8 算例1中IRL学习过程中的姿态响应
Fig.8 Attitude response during IRL learning in Case 1

图9 算例1中IRL学习过程中无人机4个子系统控制输入
Fig.9 Control inputs for the four subsystems of the UAV during IRL learning in Case 1

图10 算例2中神经网络权重的收敛性
Fig.10 Convergence of weights of NNs in Case 2
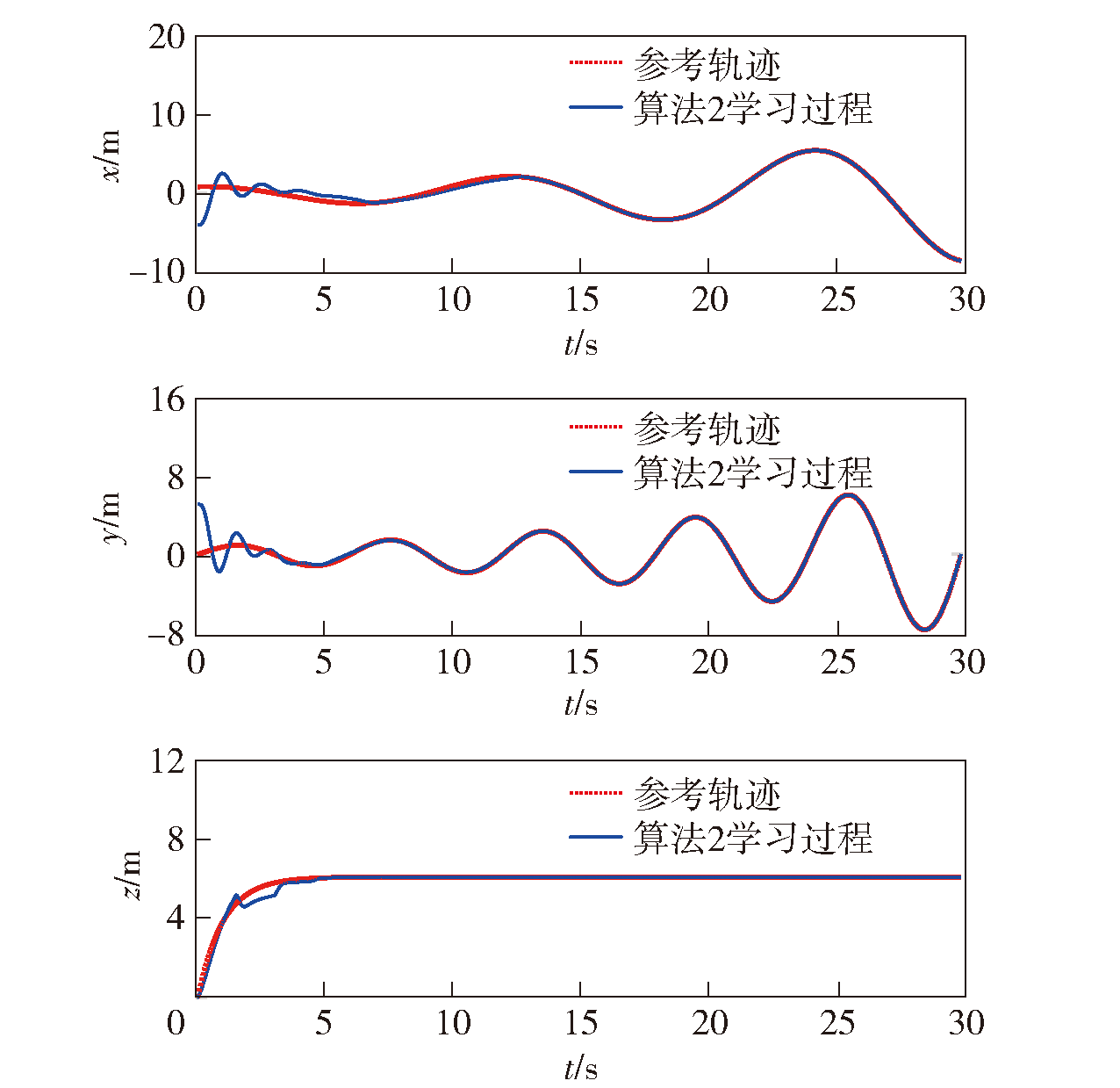
图11 算例2中IRL学习过程中的位置跟踪
Fig.11 Position tracking during IRL learning Case 2

图12 算例2中IRL学习过程中的姿态响应
Fig.12 Attitude response during IRL learning in Case 2

图13 算例2中IRL学习过程中无人机4个子系统控制输入
Fig.13 Control inputs for the four subsystems of the UAV during IRL learning in Case 2

图14 算例2中无人机的三维轨迹跟踪曲线
Fig.14 3-D tracking trajectory of the UAV in Case 2

图15 算例2中四旋翼无人机4个子系统的跟踪误差
Fig.15 Tracking errors of the four subsystems of a quadrotor UAV in Case 2
| [1] |
doi: 10.1016/j.trd.2017.02.017 URL |
| [2] |
doi: 10.1016/j.neucom.2014.09.077 URL |
| [3] |
梁文勇, 吴大伟, 谷山强, 等. 输电线路多旋翼无人机精细化自主巡检航迹优化方法[J]. 高电压技术, 2020, 46(9): 3054-3061.
|
|
|
|
| [4] |
王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289.
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
|
|
| [5] |
|
| [6] |
doi: 10.1049/cth2.v13.12 URL |
| [7] |
doi: 10.1016/j.jfranklin.2020.04.056 URL |
| [8] |
赵振华, 肖亮, 姜斌, 等. 基于扩张状态观测器的四旋翼无人机快速非奇异终端滑模轨迹跟踪控制[J]. 控制与决策, 2022, 37(9): 2201-2210.
|
|
|
|
| [9] |
修杨, 邓宏彬, 危怡然, 等. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938.
|
|
doi: 10.12382/bgxb.2021.0444 |
|
| [10] |
李俊芳, 李峰, 吉月辉, 等. 四旋翼无人机轨迹稳定跟踪控制[J]. 控制与决策, 2020, 35(2): 349-356.
|
|
|
|
| [11] |
武晓晶, 韩欣芮, 吴学礼, 等. 动力学参数未知的四旋翼无人机预定性能控制[J/OL]. 北京航空航天大学学报, (2022-04-08) [2022-11-10]. https://doi.org/10.13700/j.bh.10-01-5965.2021.0714.
|
|
|
|
| [12] |
沈智鹏, 曹晓明. 输入受限四旋翼飞行器的模糊自适应动态面轨迹跟踪控制[J]. 控制与决策, 2019, 34(7): 1401-1408.
|
|
|
|
| [13] |
doi: 10.1109/MCI.2009.932261 URL |
| [14] |
doi: 10.1016/j.automatica.2012.06.096 URL |
| [15] |
doi: 10.1109/TAC.9 URL |
| [16] |
doi: 10.1109/TCST.87 URL |
| [17] |
庞文砚, 范家璐, 姜艺, 等. 基于强化学习的部分线性离散时间系统的最优输出调节[J]. 自动化学报, 2022, 48(9): 2242-2253.
|
|
|
|
| [18] |
|
| [19] |
罗傲, 肖文彬, 周琪, 等. 基于强化学习的一类具有输入约束非线性系统最优控制[J]. 控制理论与应用, 2022, 39(1): 154-164.
|
|
|
|
| [20] |
袁兆麟, 何润姿, 姚超, 等. 基于强化学习的浓密机底流浓度在线控制算法[J]. 自动化学报, 2021, 47(7): 1558-1571.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1016/S0167-6911(00)00004-9 URL |
| [23] |
doi: S0019-0578(18)30096-X pmid: 29550063 |
| [24] |
doi: 10.1109/TNNLS.2015.2441749 URL |
| [25] |
doi: 10.1016/j.automatica.2004.11.034 URL |
| [1] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [2] | 郭书奇, 侯保林. 基于区间不确定性参数辨识的某软后坐火炮发射过程建模[J]. 兵工学报, 2023, 44(4): 1107-1117. |
| [3] | 傅晋博, 张栋, 王孟阳, 赵军民. 面向目标定位精度提升的无人机航迹规划[J]. 兵工学报, 2023, 44(11): 3394-3406. |
| [4] | 帅志斌, 贺帅, 李国辉, 李耀恒, 李勇, 张颖, 简洪超. 特种履带车辆机电复合传动装置低温启动过程建模与优化控制[J]. 兵工学报, 2023, 44(1): 117-128. |
| [5] | 修杨, 邓宏彬, 危怡然, 李东方. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938. |
| [6] | 王明明, 钱林方, 陈光宋, 刘太素. 基于概率密度演化方法的火炮输弹过程不确定性分析[J]. 兵工学报, 2022, 43(6): 1215-1224. |
| [7] | 朱毅飞, 林德福, 莫雳, 叶建川. 四旋翼无人机旋翼对机身非定常气动干扰特性[J]. 兵工学报, 2022, 43(2): 410-422. |
| [8] | 刘安民, 高峰, 张青斌, 袁天保, 张国斌. 基于多项式混沌展开方法的翼伞飞行不确定性[J]. 兵工学报, 2021, 42(7): 1392-1399. |
| [9] | 王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289. |
| [10] | 叶建川, 王江, 梁熠, 宋韬, 吴则良, 徐超. 四旋翼无人机前飞模态特性[J]. 兵工学报, 2021, 42(11): 2476-2490. |
| [11] | 聂守成, 钱林方, 陈志群, 卫俞凯, 尹强. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制[J]. 兵工学报, 2020, 41(9): 1745-1751. |
| [12] | 邸青, 周竞烨, 方凯, 姚佳琪, 李家旺. 基于模型参数不确定的欠驱动非对称自主水下航行器全局镇定控制研究[J]. 兵工学报, 2020, 41(5): 950-957. |
| [13] | 刘钧圣, 王刚, 王琨, 史宏博, 郭斌. 考虑不确定性的模块化战术导弹优化设计[J]. 兵工学报, 2020, 41(2): 270-279. |
| [14] | 王茜, 侯保林, 姚来鹏, 文浩. 基于干扰观测器的弹药传输机械臂非线性连续时变反馈控制[J]. 兵工学报, 2020, 41(11): 2179-2188. |
| [15] | 李阳天, 李海滨, 韦广梅, 翁洁鑫. 基于改进型多项式混沌展开的固体火箭发动机药柱低温点火不确定性量化分析[J]. 兵工学报, 2020, 41(1): 40-48. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4