
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 178-190.doi: 10.12382/bgxb.2023.0851
所属专题: 群体协同与自主技术
李曹妍1, 郭振川1, 郑冬冬2, 魏延岭1,*( )
)
收稿日期:2023-09-01
上线日期:2024-01-10
通讯作者:
基金资助:
LI Caoyan1, GUO Zhenchuan1, ZHENG Dongdong2, WEI Yanling1,*()
Received:2023-09-01
Online:2024-01-10
摘要:
多机器人协同系统具备强鲁棒性和容错性,可显著提高整体效率并完成复杂任务。当前多机器人编队常采用集中式架构,此方式依赖中央决策模块,尤其在处理众多机器人的协同任务时存在可扩展性不足、可解性低的问题。提出了一种基于领导者-跟随者方法的分布式模型预测控制器(DMPC),处理多机器人协同编队任务。基于运动学和图网络,对机器人和系统通信进行建模。将编队问题中的轨迹跟踪和队形保持任务分解,分别对领导者和跟随者设计了模型预测控制器。设计了编队队形矩阵,并将其与通信图网络结合,以实现一致性控制或编队控制。各机器人独立决策、并行计算,在面对较多数量机器人的协同编队时表现出更好的准确性和可扩展性。同时,该控制器的设计中还考虑了控制输入变化,有助于减小能耗。设计了数值仿真及方案对比,并通过物理仿真实验,验证了所设计的控制策略的有效性。
中图分类号:
李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190.
LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control[J]. Acta Armamentarii, 2023, 44(S2): 178-190.
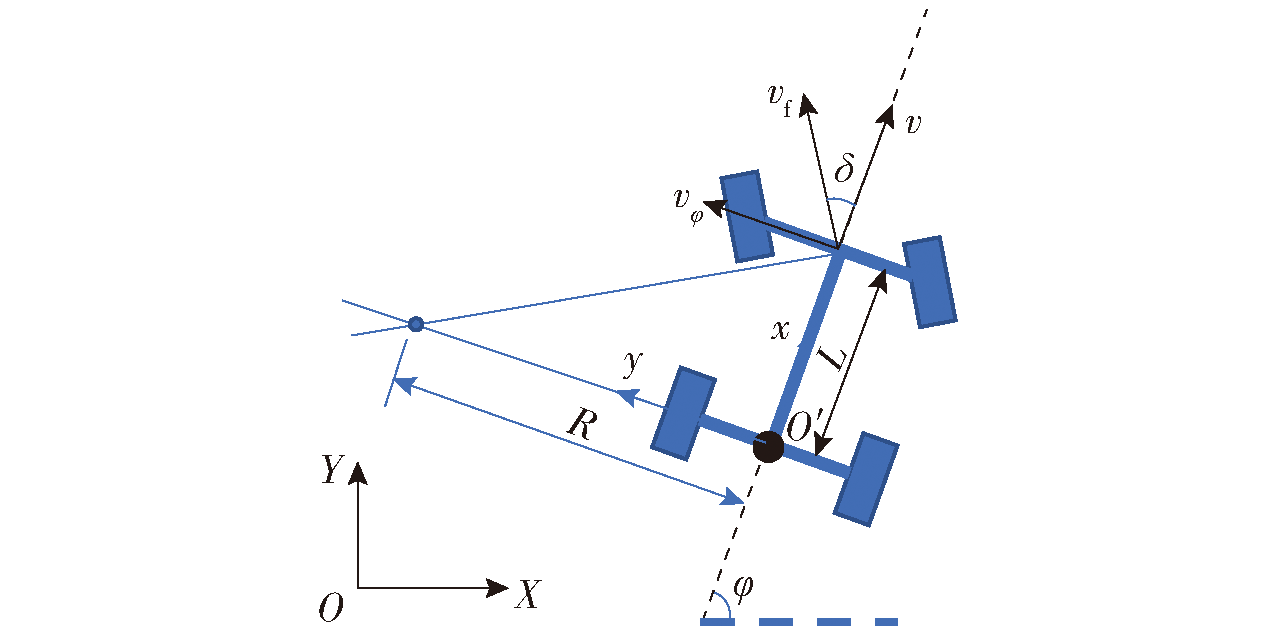
图1 机器人底盘运动学模型
Fig.1 Kinematics model of robot chassis
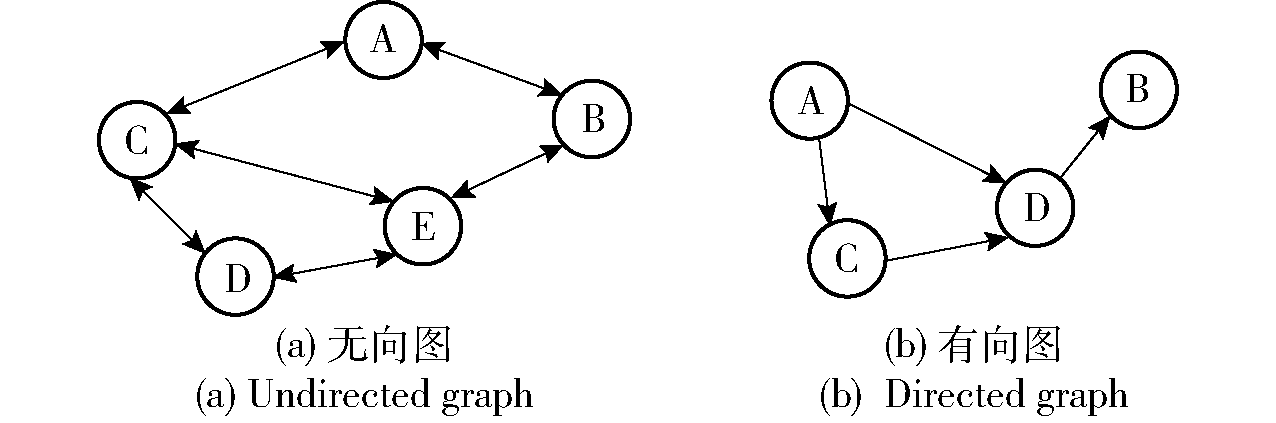
图2 无向图和有向图
Fig.2 Undirected graph and directed graph

图3 四移动机器人的有向通信网络
Fig.3 Directed communication network of four mobile robots
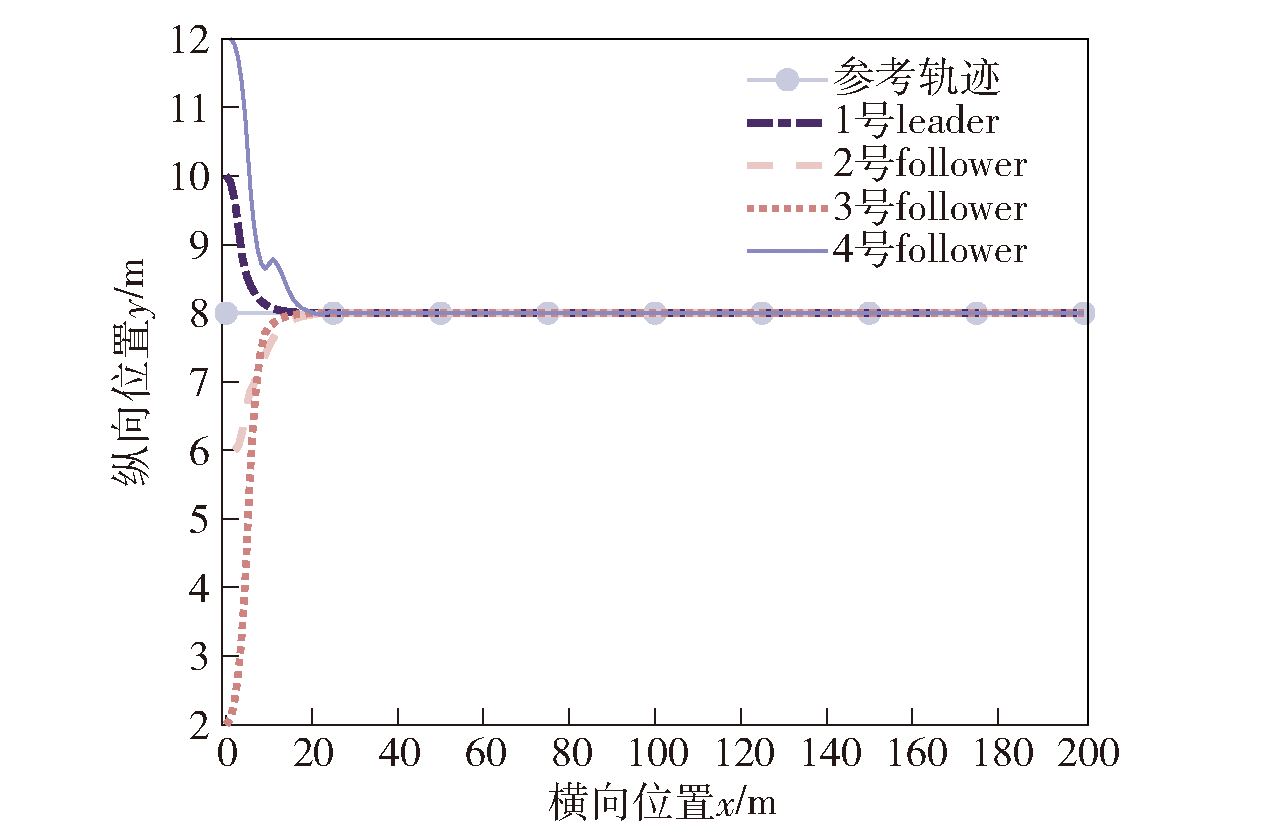
图4 多机器人一致性轨迹跟踪效果(直线轨迹)
Fig.4 Consensus trajectory tracking result of multi-robot (linear trajectory)
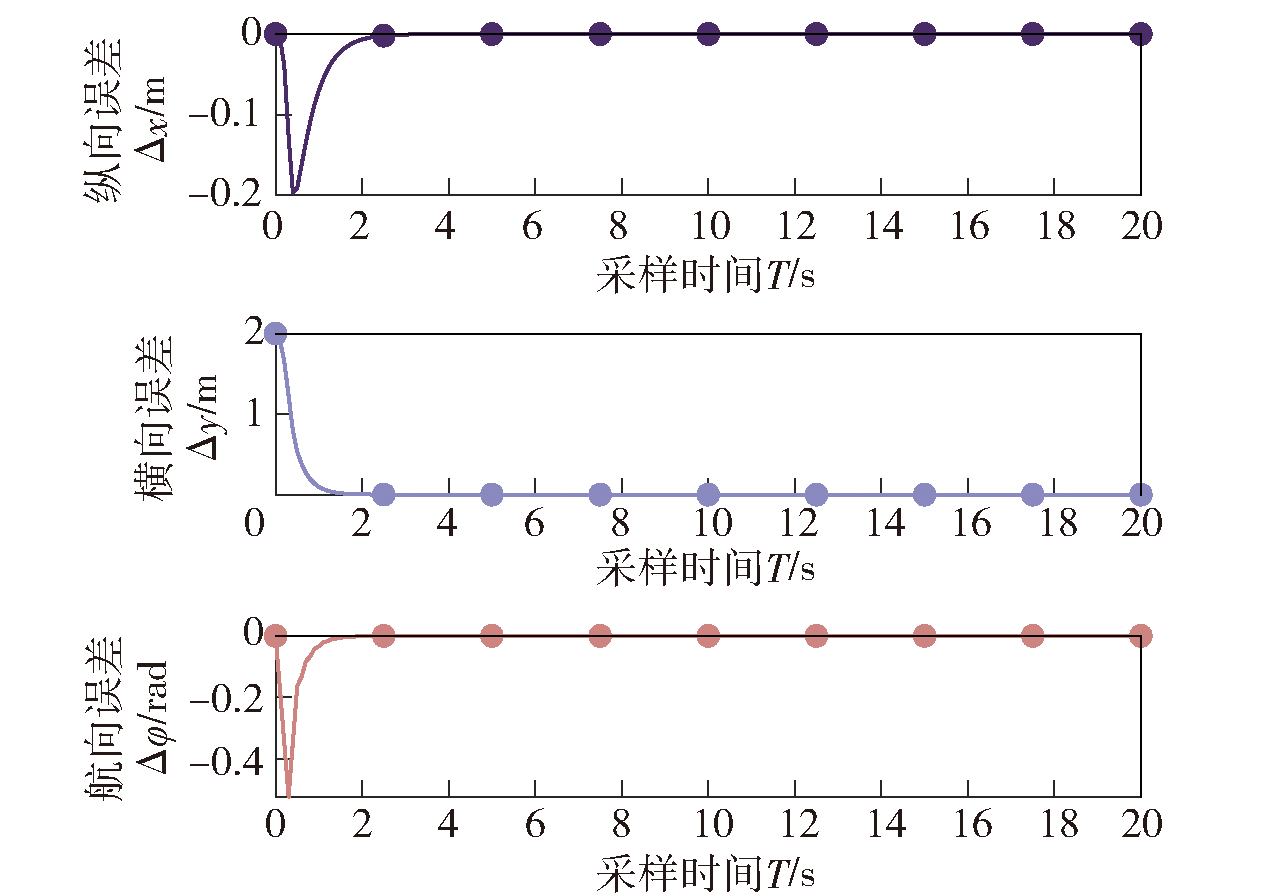
图5 领导者轨迹跟踪误差(直线轨迹)
Fig.5 Trajectory tracking error of leader (linear trajectory)
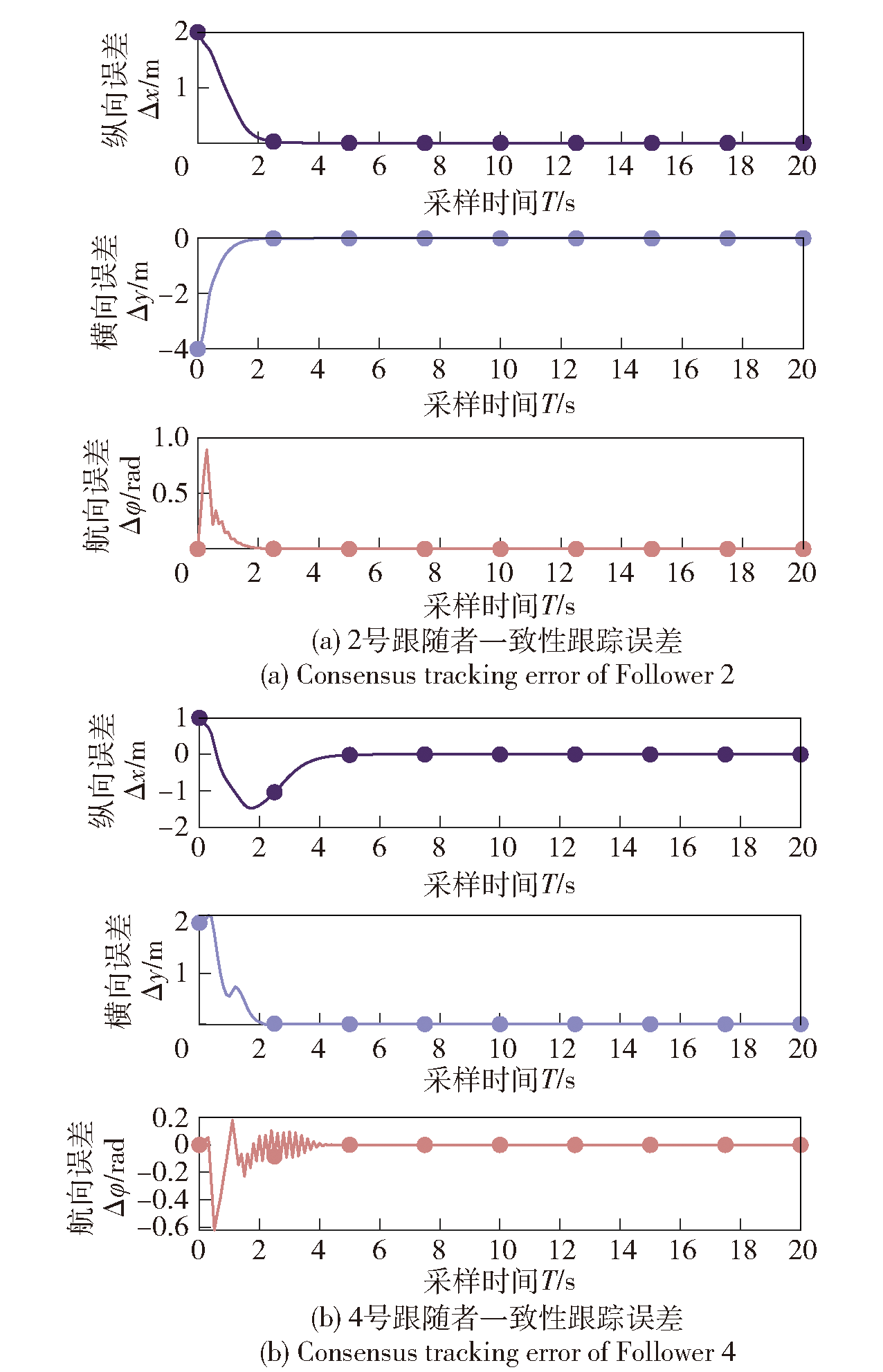
图6 跟随者一致性跟踪误差(直线轨迹)
Fig.6 Consensus tracking errors of the followers (linear trajectory)
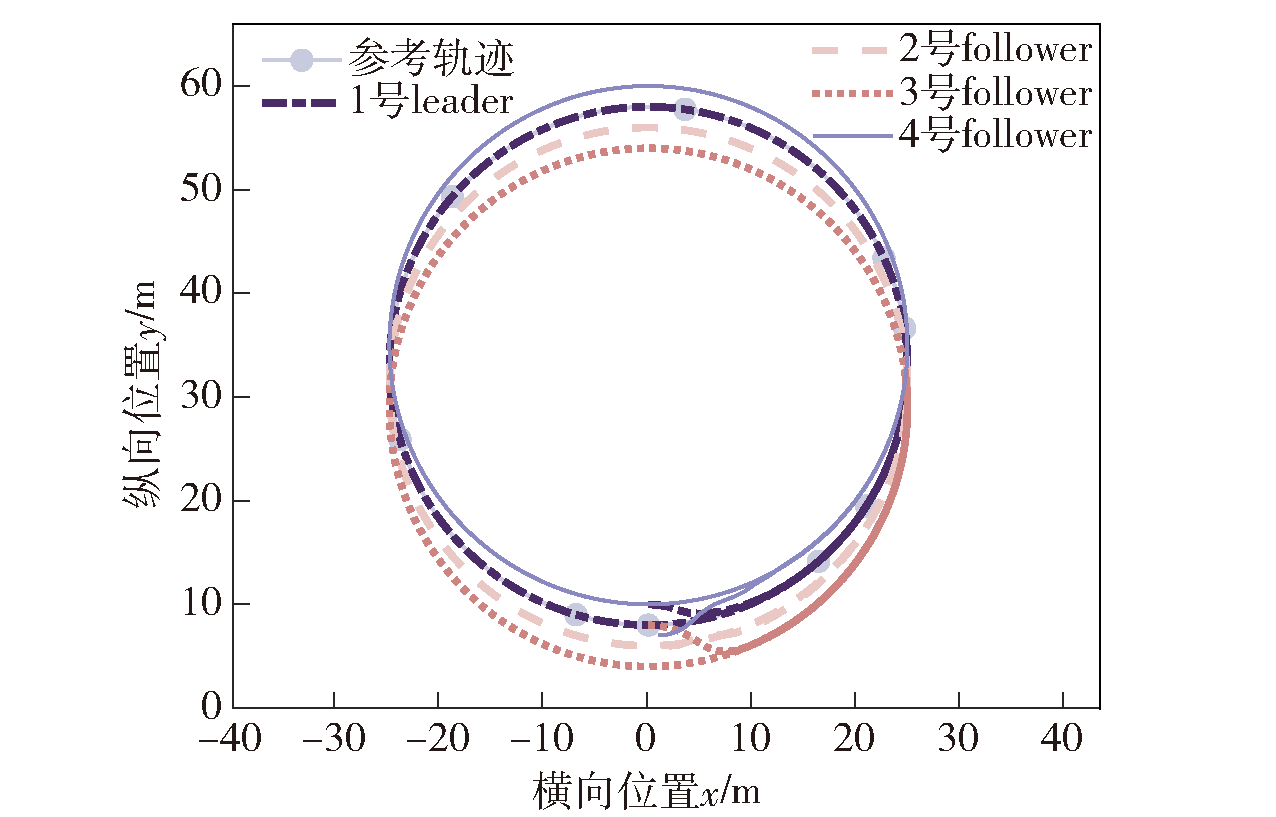
图7 多机器人编队控制轨迹跟踪效果 (MPC圆形轨迹)
Fig.7 Trajectory tracking result of multi-robot formation control (MPC circular trajectory)
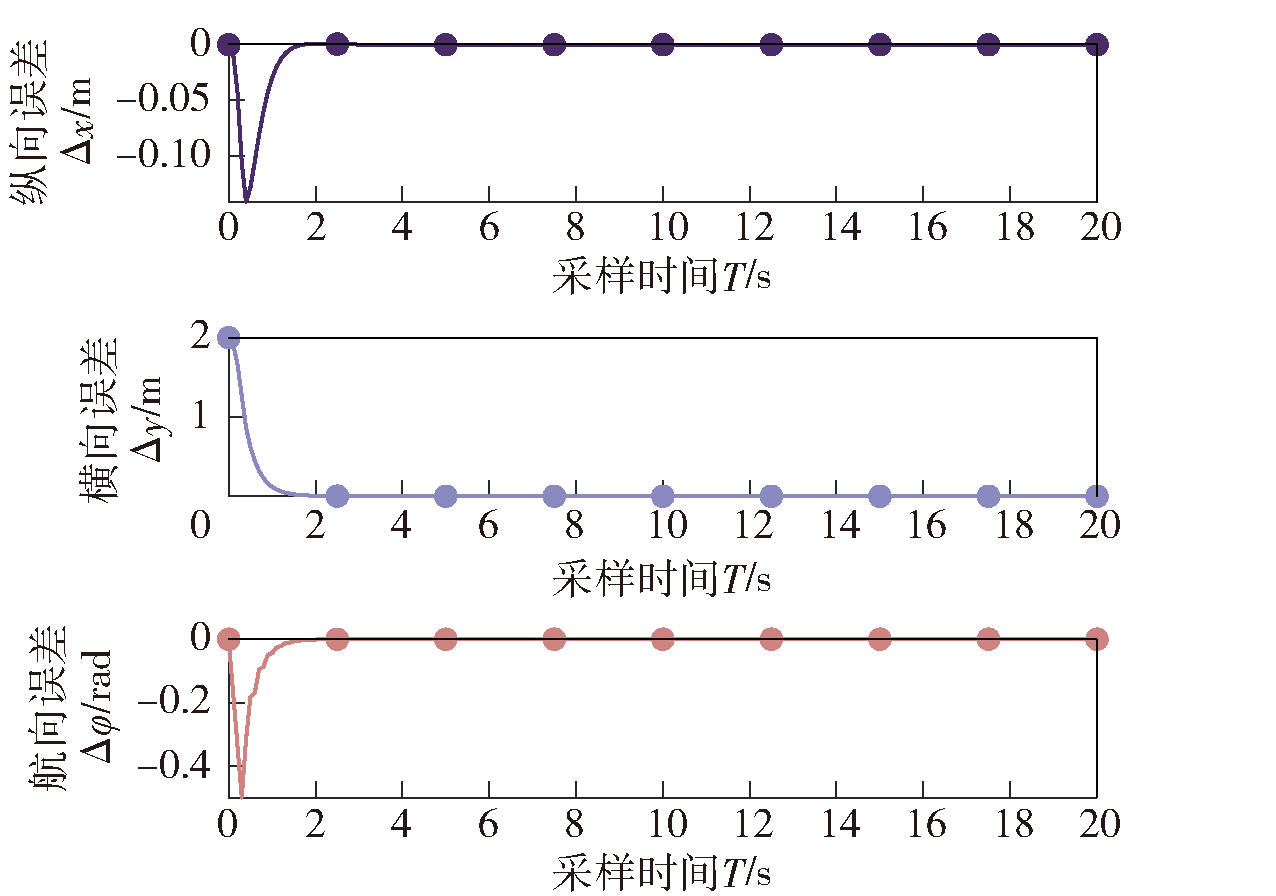
图8 领导者轨迹跟踪误差(MPC圆形轨迹)
Fig.8 Trajectory tracking error of leader (MPC circular trajectory)
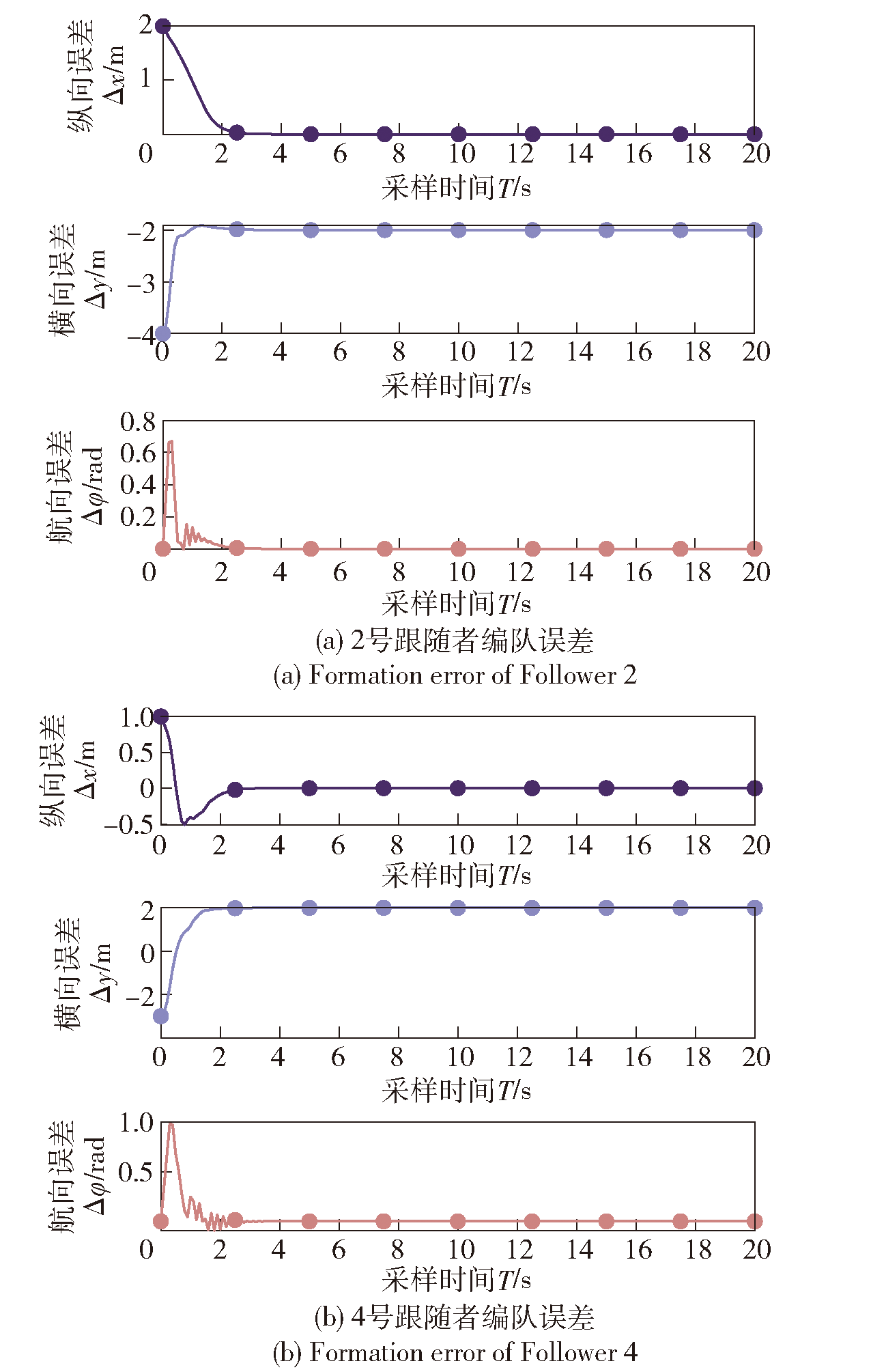
图9 跟随者编队误差(MPC圆形轨迹)
Fig.9 Formation errors of the followers (MPC circular trajectory)
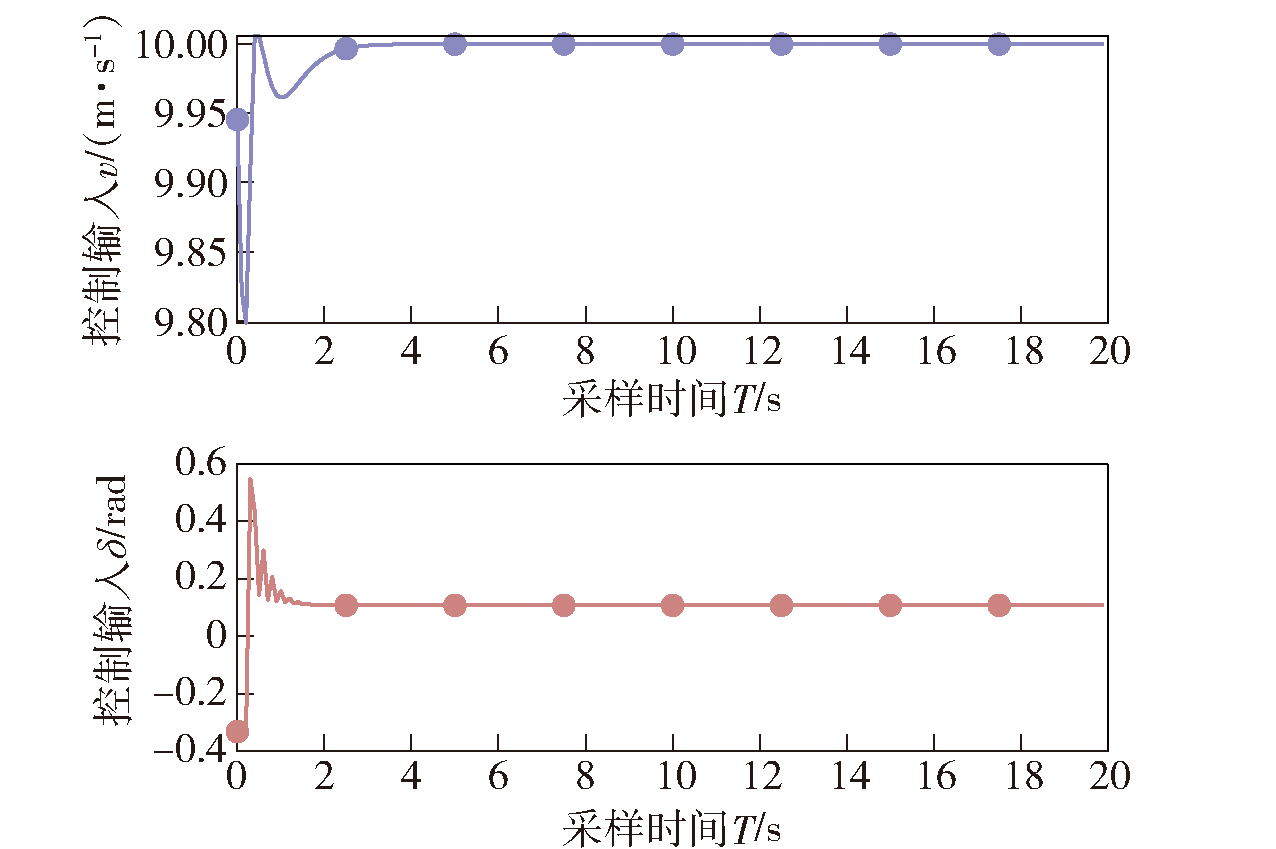
图10 MPC编队控制输入
Fig.10 MPC formation control input
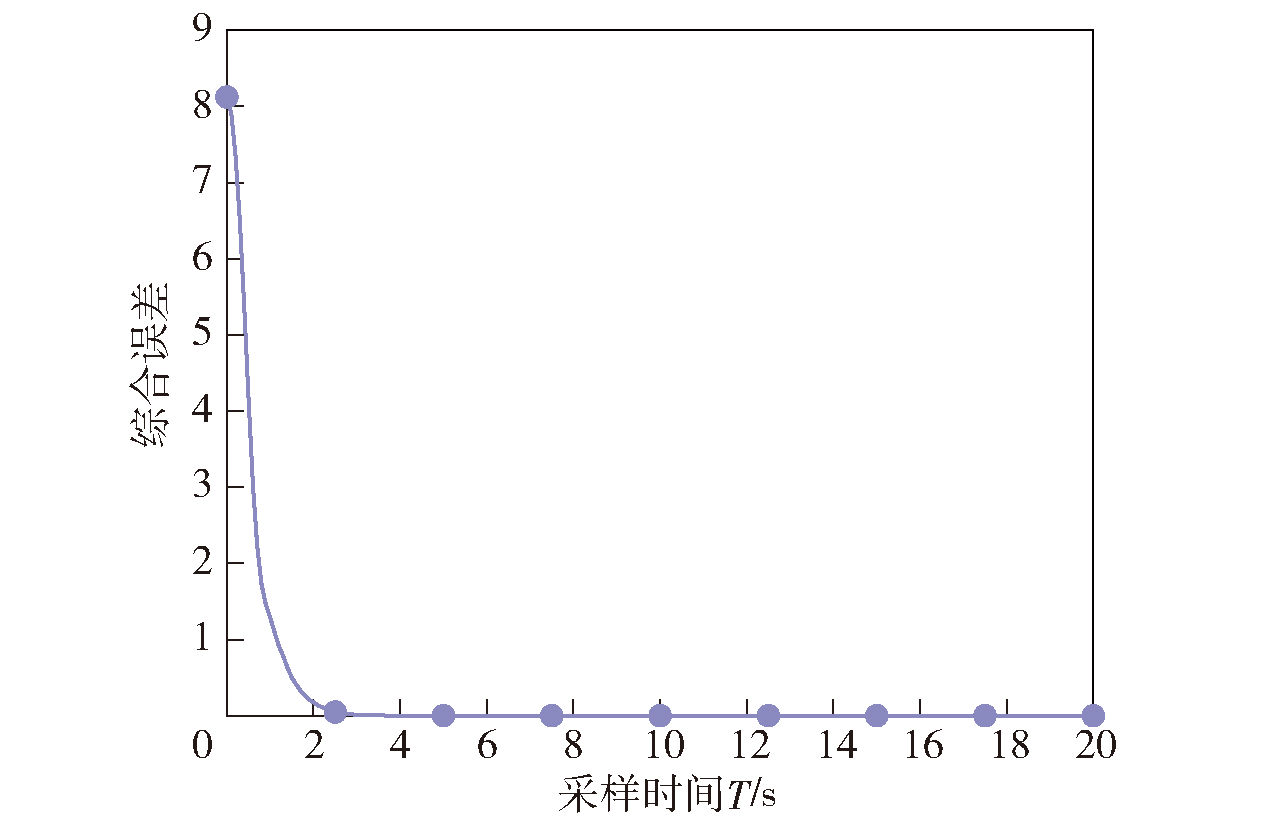
图11 MPC综合编队误差
Fig.11 MPC integrated formation error
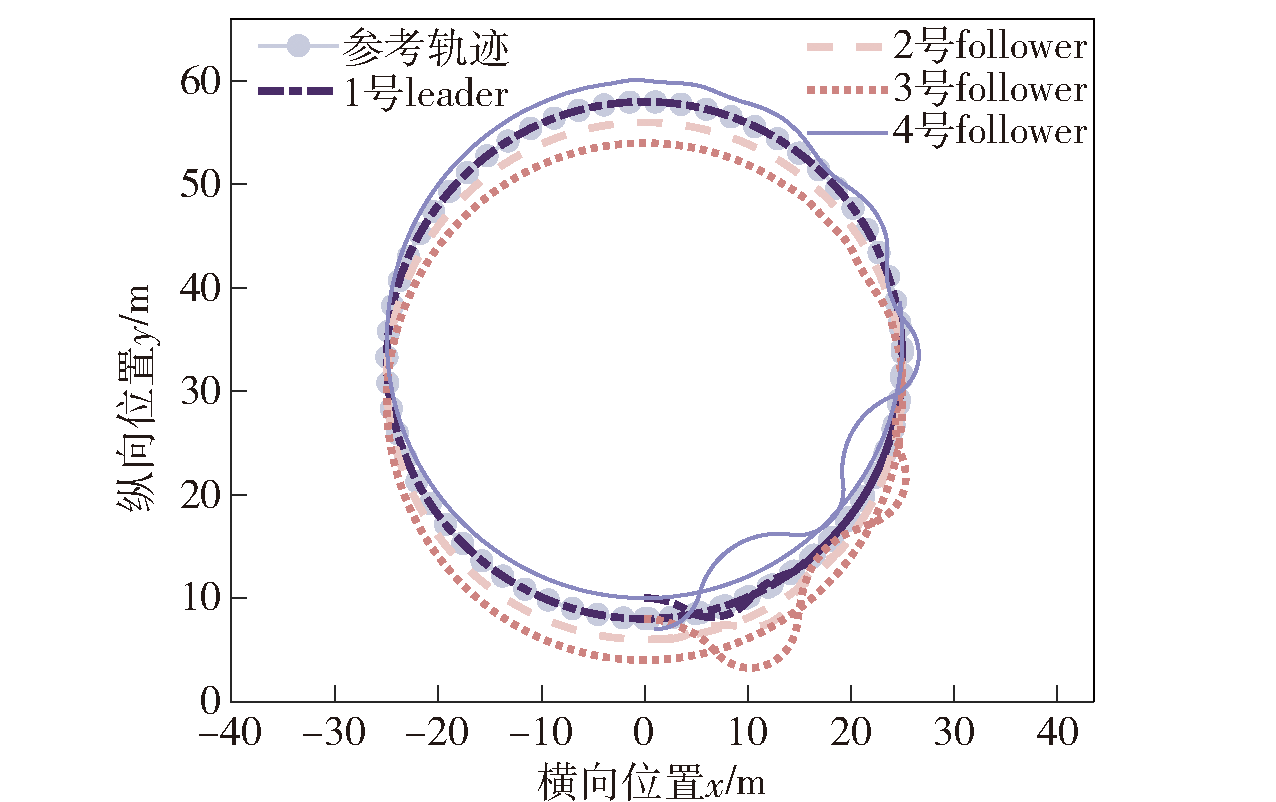
图12 多机器人编队控制轨迹跟踪效果 (状态反馈圆形轨迹)
Fig.12 Trajectory tracking result of multi-robot formation control (state feedback circular trajectory)
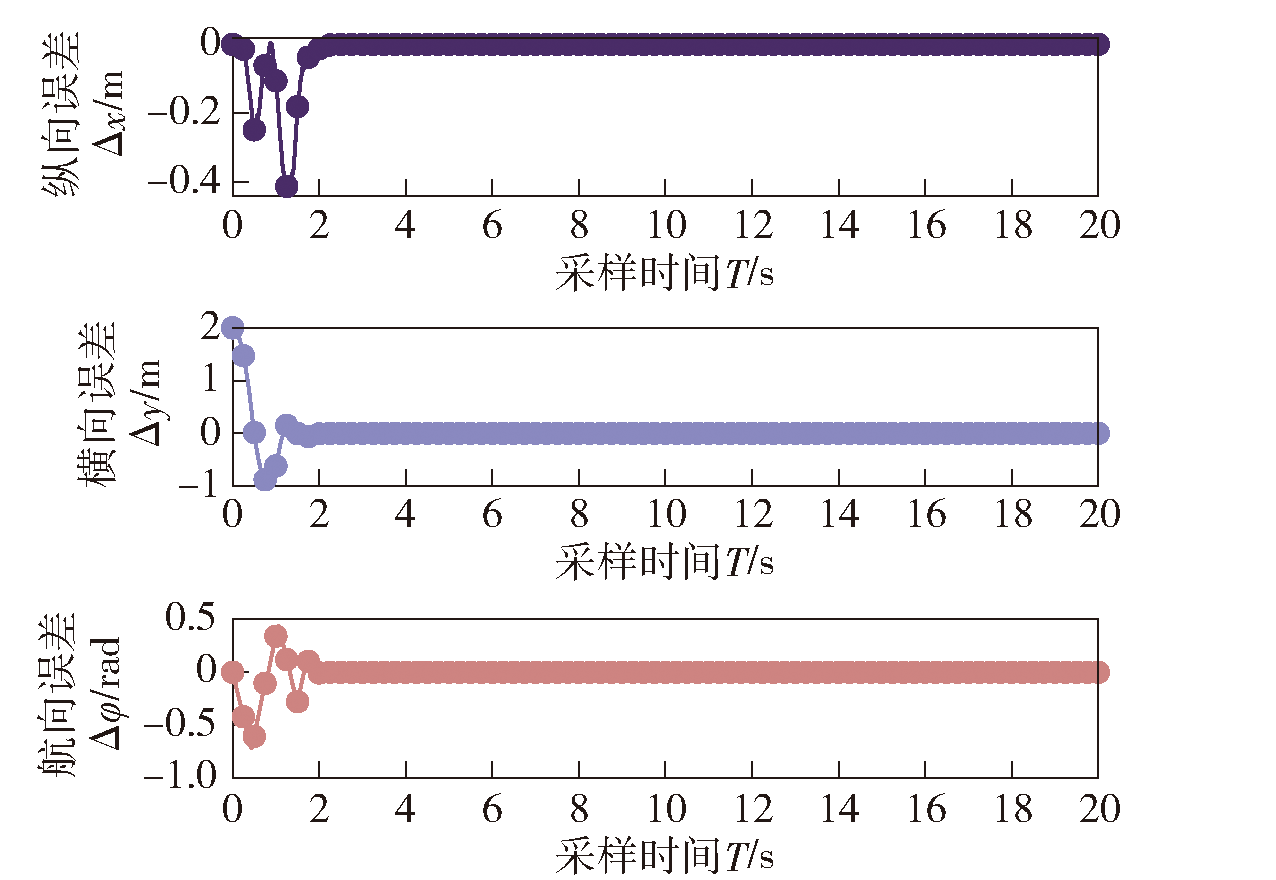
图13 领导者轨迹跟踪误差(状态反馈圆形轨迹)
Fig.13 Trajectory tracking error of leader (state feedback circular trajectory)
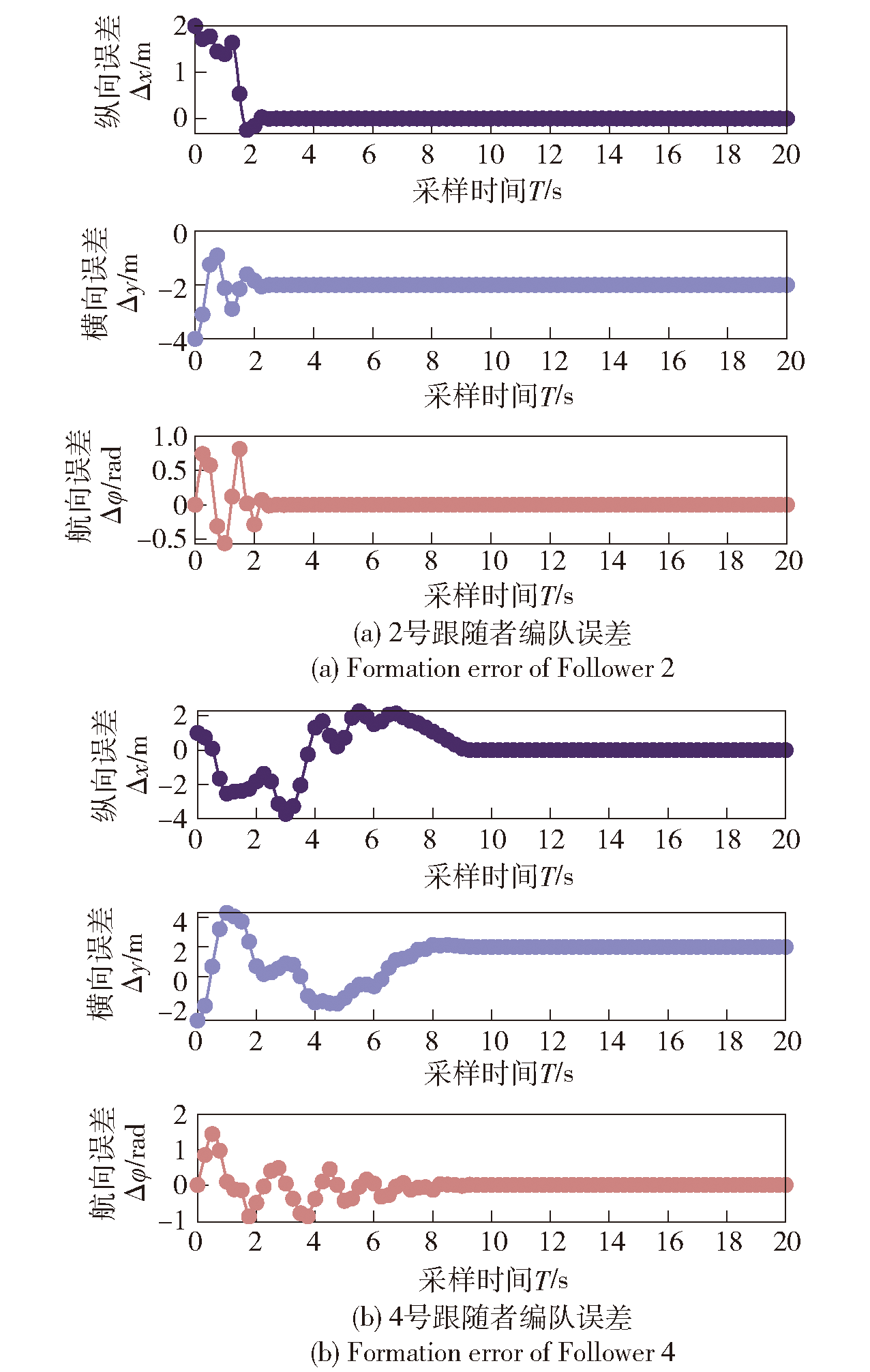
图14 跟随者编队误差(状态反馈圆形轨迹)
Fig.14 Formation errors of the followers (state feedback circular trajectory)
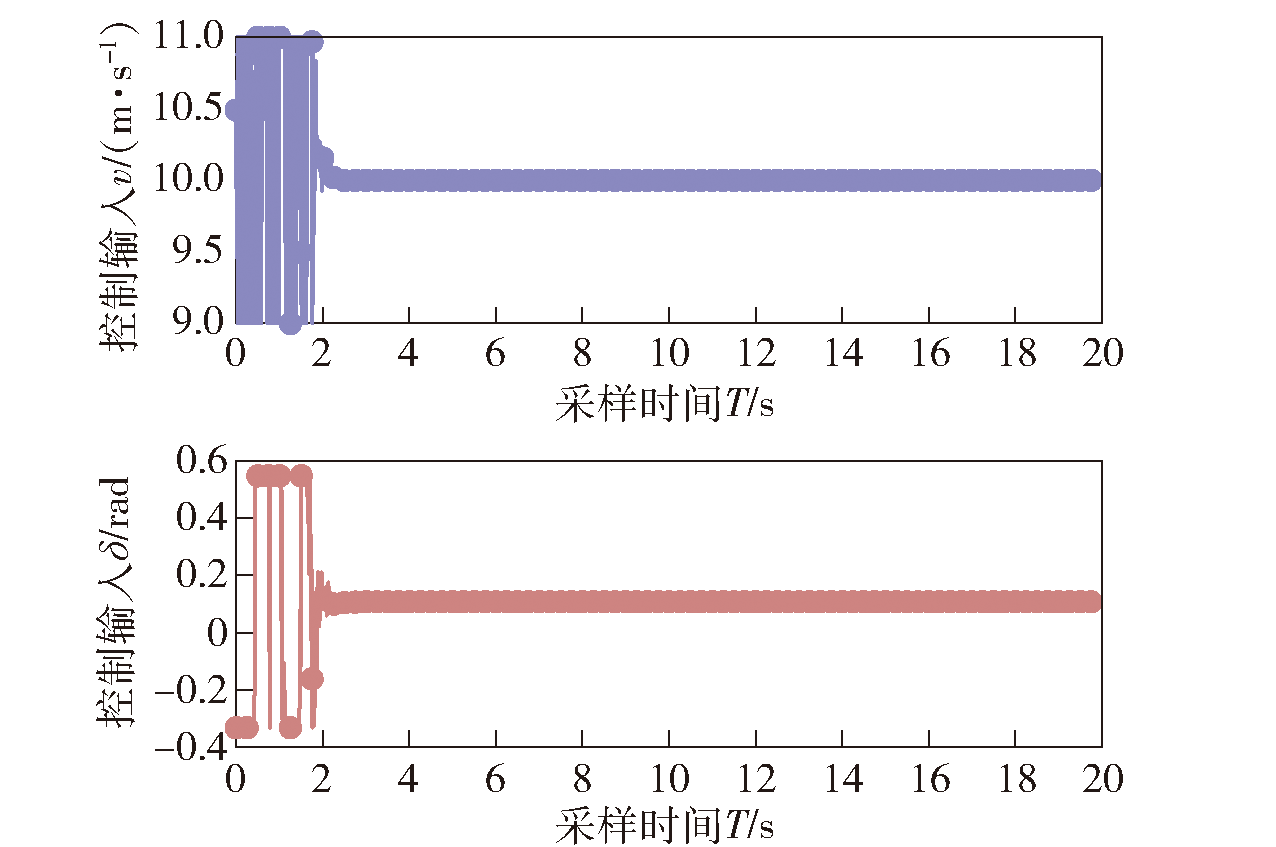
图15 状态反馈编队控制输入
Fig.15 Formation control input of state feedback
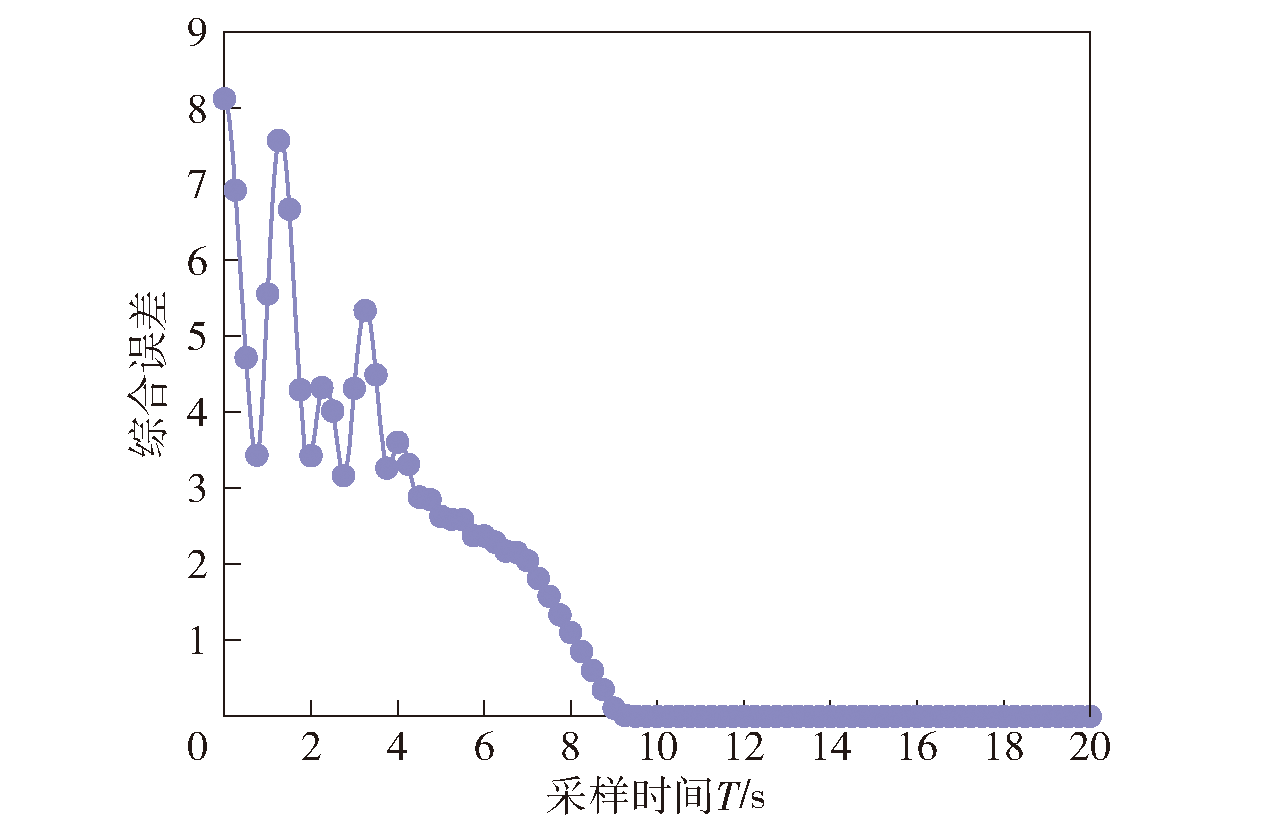
图16 状态反馈综合编队误差
Fig.16 State feedback integrated formation error

图17 曲线轨迹跟踪编队控制物理仿真实验场景
Fig.17 Physical simulation of curve trajectory tracking formation control
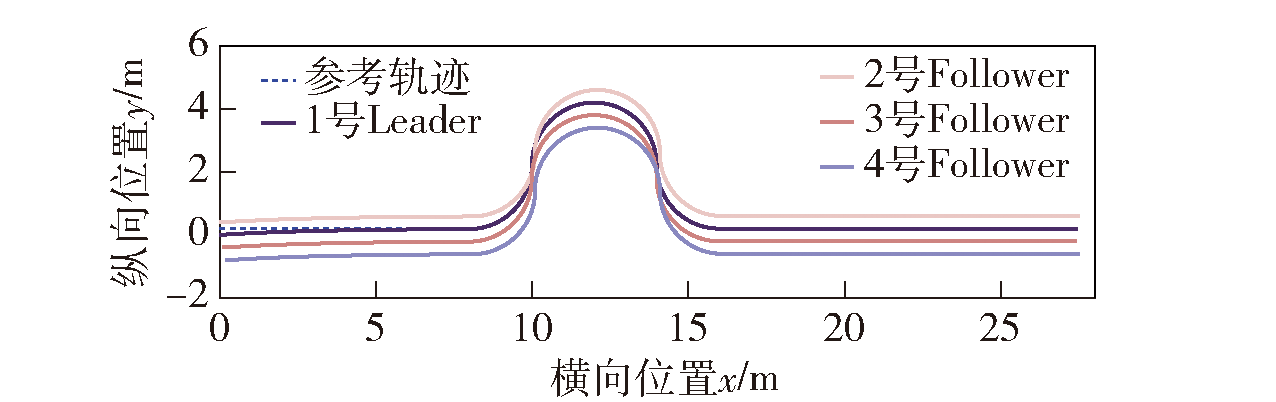
图18 编队控制系统控制实际轨迹与参考轨迹图
Fig.18 Actual trajectories and reference trajectory of the formation control systems
| [1] |
张志强, 王龙. 多智能体系统的事件驱动控制[J]. 控制理论与应用, 2018, 35(8): 1051-1065.
|
|
|
|
| [2] |
白成超, 王会霞, 郭继峰, 等. 高速飞行器集群通信拓扑自适应控制方法[J]. 宇航学报, 2023, 44(7): 1008-1019.
|
|
|
|
| [3] |
doi: 10.1109/TMECH.2021.3068259 URL |
| [4] |
doi: 10.1016/j.advengsoft.2017.01.002 URL |
| [5] |
doi: 10.1109/TSMC.2019.2926534 URL |
| [6] |
doi: 10.1016/j.oceaneng.2022.113521 URL |
| [7] |
王健安, 闫慧娴, 赵志诚. 事件触发策略下多移动机器人抗干扰固定时间编队控制[J]. 电子学报, 2023, 51(5): 1256-1265.
doi: 10.12263/DZXB.20211610 |
|
|
|
| [8] |
刘泽群, 周军, 郭宗易, 等. 基于领机状态估计的多无人机耦合协同编队控制[J]. 北京理工大学学报, 2023, 43(6): 623-632.
|
|
|
|
| [9] |
doi: 10.1016/j.amc.2018.12.056 URL |
| [10] |
doi: 10.1109/LSP.2016. URL |
| [11] |
郭继峰, 郑红星, 贾涛, 等. 异构无人系统协同作战关键技术综述[J]. 宇航学报, 2020, 41(6): 686-696.
|
|
|
|
| [12] |
doi: 10.1016/j.automatica.2017.07.004 URL |
| [13] |
|
| [14] |
doi: 10.1016/j.automatica.2021.109501 URL |
| [15] |
doi: 10.1109/TLA.2021.9475873 URL |
| [16] |
doi: 10.1007/s11633-020-1264-x |
| [17] |
张令, 段海滨, 雍婷, 等. 基于寒鸦配对交互行为的无人机集群编队控制[J]. 北京航空航天大学学报, 2021, 47(2): 391-397.
|
|
|
|
| [18] |
刘安东, 秦冬冬. 基于虚拟结构法的多移动机器人分布式预测控制[J]. 控制与决策, 2021, 36(5): 1273-1280.
|
|
|
|
| [19] |
doi: 10.1061/(ASCE)AS.1943-5525.0001347 URL |
| [20] |
周俊杰, 史志富. 基于改进领航-跟随法的无人机集群编队飞行控制方法研究[C]//第四届中国航空科学技术大会论文集. 沈阳, 中国: 中航出版传媒有限责任公司,2019: 11.
|
|
|
|
| [21] |
吕永申, 刘力嘉, 杨雪榕, 等. 人工势场与虚拟结构相结合的无人机集群编队控制[J]. 飞行力学, 2019, 37(3): 43-47.
|
|
|
|
| [22] |
崔立堃, 冯绪永, 王承祥. 人工势场和虚拟结构结合的无人车编队及避障研究[J]. 兵器装备工程学报, 2022, 43(9): 304-308.
|
|
|
|
| [23] |
doi: 10.1109/TCSI.2021.3069741 URL |
| [24] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [25] |
doi: 10.1109/TII.2022.3201589 URL |
| [26] |
doi: 10.1109/TNNLS.2015.2490072 pmid: 26540717 |
| [27] |
魏连震, 龚建伟, 陈慧岩, 等. 基于强化学习补偿的地面无人战车行进间跟瞄自适应控制[J]. 兵工学报, 2022, 43(8): 1947-1955.
doi: 10.12382/bgxb.2021.0786 |
|
|
|
| [28] |
张炳力, 佘亚飞. 基于深度强化学习的轨迹跟踪横向控制研究[J]. 合肥工业大学学报(自然科学版), 2023, 46(7): 865-872.
|
|
|
|
| [29] |
doi: 10.1177/0278364913495721 URL |
| [30] |
龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制[M]. 第2版. 北京: 北京理工大学出版社, 2020: 85-113.
|
|
|
|
| [31] |
|
| [32] |
郭渊博, 李琦, 闵博旭, 等. 基于分布式模型预测控制的欠驱动AUV编队控制[J]. 水下无人系统学报, 2023, 31(3): 405-412.
|
|
|
|
| [33] |
|
| [1] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [2] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [3] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [4] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [5] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [6] | 蒋岩, 丁语嫣, 张兴龙, 徐昕. 基于模型预测与策略学习的智能车辆人机协同控制算法[J]. 兵工学报, 2023, 44(11): 3465-3477. |
| [7] | 张渊博, 项昌乐, 王伟达, 陈泳丹. 基于粒子群优化-蚁群融合算法的分布式电驱动车辆模型预测转矩协调控制策略[J]. 兵工学报, 2023, 44(11): 3253-3258. |
| [8] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| [9] | 周球, 周悦, 孙洪鸣, 郭威, 吴凯, 兰彦军. 深海着陆车路径规划及跟踪控制方法[J]. 兵工学报, 2023, 44(1): 298-306. |
| [10] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [11] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [12] | 陈慧岩, 关海杰, 刘海鸥, 龚建伟, 吴贺禹. 履带平台无人驾驶系统基于语义信息的模块串联方法[J]. 兵工学报, 2022, 43(11): 2705-2716. |
| [13] | 陈路明, 廖自力, 马晓军, 刘春光. 基于分层控制的混合动力车辆实时能量管理策略[J]. 兵工学报, 2021, 42(8): 1580-1591. |
| [14] | 李睿, 项昌乐, 王超, 范晶晶, 刘春林. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137. |
| [15] | 刘聪, 刘辉, 韩立金, 陈科. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10): 2102-2113. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4