
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3279-3294.doi: 10.12382/bgxb.2023.0775
所属专题: 群体协同与自主技术
潘博1,2, 李胜飞1,2, 汪洋1,2,*( ), 谭森起1,2, 张乃斯1,2, 罗天1,2, 崔星1,2
), 谭森起1,2, 张乃斯1,2, 罗天1,2, 崔星1,2
收稿日期:2023-08-21
上线日期:2023-11-01
通讯作者:
基金资助:
PAN Bo1,2, LI Shengfei1,2, WANG Yang1,2,*(), TAN Senqi1,2, ZHANG Naisi1,2, LUO Tian1,2, CUI Xing1,2
Received:2023-08-21
Online:2023-11-01
摘要:
包络线控制起源于航空航天工业,它提供了飞行状态的安全保障和机动边界,为飞行器控制带来了良好效果。基于8×8多轴分布式驱动无人车辆和包络线方法核心思想,提出一种将车辆推向极限的整车动力学控制器。通过建立轮胎滑移圆提出一种新的方法以用于评估车辆驱动力状态,并将轮胎滑移状态与车辆“g-g”图相结合,用来实现无人驾驶状态下逼近车辆操纵能力极限,发挥车辆动力性能与灵活性能,同时确保在轨迹跟踪时的跟踪精度,精准高效地完成平台任务。考虑外界环境不确定扰动与因素变化对极限状态下车辆稳定性影响,基于车辆横向动力学模型的稳定特性分析,获得不同条件下稳定域相平面,并探索其变化机理、归纳数学描述表达式。通过对车辆稳定相平面的分析,提出以车辆横摆力矩为输出的稳定保持控制器。针对上层控制器驱动力与横摆力矩的输出,设计下层转矩分配控制策略,通过冗余执行器的最优分配实现整车性能发挥。整车集成控制策略部署于一辆8×8原型试验车辆,在越野路面上进行多项科目测试,试验结果表明:在高速条件下,无人车在轨迹跟踪中具有更好的动力性能和安全性能。
中图分类号:
潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294.
PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit[J]. Acta Armamentarii, 2023, 44(11): 3279-3294.

图1 无人驾驶方程式赛车
Fig.1 Autonomous formula race car

图2 8×8车辆与轮胎动力学简化模型
Fig.2 Simplified dynamics models of 8×8 vehicle and tire
| 参数 | 含义 |
|---|---|
| Fxwij,Fywij,Fzwij | 轮胎坐标系下每个轮胎的纵、横、垂向力 |
| Fxij,Fyij | 大地坐标系下每个轮胎的纵、横向力 |
| vx, vy, vz, ωx, ωy, ωz | 车辆质心x轴、y轴、z轴方向的速度与角速度 |
| m,ax, ay, mc, l1, l2 | 整车质量、车辆纵向加速度、车辆横向加速度、车身质量、侧倾中心与质心之间高度、俯仰中心与质心之间高度 |
| Fsij, Fssij, Fsdij | 悬架力、静态悬架力、动态悬架力 |
| δij, B, Li | 转向角、轮距、车轴与质心之间距离 |
| Ix, Iy, Iz | 车身x轴、y轴、z轴方向的转动惯量 |
| β, θ, ϕ | 车身质心的侧偏角、侧倾角、横摆角 |
| αs, CD, A, ρ, f | 路面坡度、风阻系数、迎风面积、空气密度、轮胎滚动阻力系数 |
| Je, Tij, Re, ωij | 滚动力矩、驱动力矩、轮胎半径、轮胎转速 |
| zs, zw | 悬架变形量(位移)、轮胎垂向位移 |
表1 动力学模型参数含义注释
Table 1 Signification of symbols in vehicle model equation
| 参数 | 含义 |
|---|---|
| Fxwij,Fywij,Fzwij | 轮胎坐标系下每个轮胎的纵、横、垂向力 |
| Fxij,Fyij | 大地坐标系下每个轮胎的纵、横向力 |
| vx, vy, vz, ωx, ωy, ωz | 车辆质心x轴、y轴、z轴方向的速度与角速度 |
| m,ax, ay, mc, l1, l2 | 整车质量、车辆纵向加速度、车辆横向加速度、车身质量、侧倾中心与质心之间高度、俯仰中心与质心之间高度 |
| Fsij, Fssij, Fsdij | 悬架力、静态悬架力、动态悬架力 |
| δij, B, Li | 转向角、轮距、车轴与质心之间距离 |
| Ix, Iy, Iz | 车身x轴、y轴、z轴方向的转动惯量 |
| β, θ, ϕ | 车身质心的侧偏角、侧倾角、横摆角 |
| αs, CD, A, ρ, f | 路面坡度、风阻系数、迎风面积、空气密度、轮胎滚动阻力系数 |
| Je, Tij, Re, ωij | 滚动力矩、驱动力矩、轮胎半径、轮胎转速 |
| zs, zw | 悬架变形量(位移)、轮胎垂向位移 |

图3 8×8车辆动力极限表述——“g-g”图
Fig.3 Dynamic limit description of 8×8 vehicle: “g-g” diagram
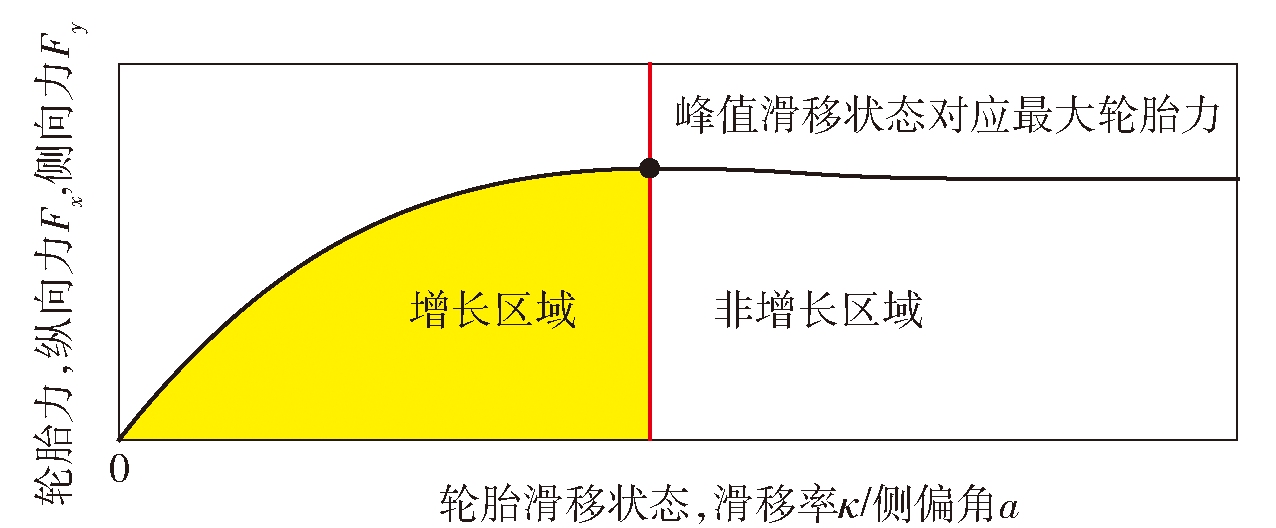
图4 轮胎力学典型非线性特征曲线
Fig.4 Typical nonlinear characteristic curve of tire mechanics

图5 轮胎滑移圆
Fig.5 Slip circle of tire

图6 不同状态下的车辆稳定域相图
Fig.6 Stability phase plane diagrams of vehicle in different conditions

图7 整车集成控制器架构示意图
Fig.7 Framework of vehicle integrated controller

图8 8×8车辆轨迹跟踪横向误差模型
Fig.8 Lateral error model of trajectory tracking for 8×8 vehicle
| 参数 | 含义 | 数值 |
|---|---|---|
| CD | 整车空气阻力系数 | 0.45 |
| f | 轮胎地面阻力系数 | 0.4 |
| ku | 纵向速度误差反馈系数 | 4000 |
| kκ | 纵向滑移误差反馈系数 | 6150 |
| kα | 纵向侧偏误差反馈系数 | 4230 |
| kno-slip | 纵向非滑移误差反馈系数 | 2500 |
| ke | 横向误差系数 | 1390 |
| kΔψ | 航向误差系数 | 545 |
| Kqd | 稳定性反馈系数 | 1320 |
| q | 稳定性权重矩阵系数 | 0.3 |
| rfd | 稳定性反馈控制权重系数 | 0.355 |
表2 仿真与外场试验测试主要参数
Table 2 Main parameters for simulation and experiment
| 参数 | 含义 | 数值 |
|---|---|---|
| CD | 整车空气阻力系数 | 0.45 |
| f | 轮胎地面阻力系数 | 0.4 |
| ku | 纵向速度误差反馈系数 | 4000 |
| kκ | 纵向滑移误差反馈系数 | 6150 |
| kα | 纵向侧偏误差反馈系数 | 4230 |
| kno-slip | 纵向非滑移误差反馈系数 | 2500 |
| ke | 横向误差系数 | 1390 |
| kΔψ | 航向误差系数 | 545 |
| Kqd | 稳定性反馈系数 | 1320 |
| q | 稳定性权重矩阵系数 | 0.3 |
| rfd | 稳定性反馈控制权重系数 | 0.355 |

图9 试验测试场地图
Fig.9 Experiment site

图10 双移线场景仿真测试结果
Fig.10 Results of double line change test in simulation

图11 加速性能测试结果
Fig.11 Results of acceleration test
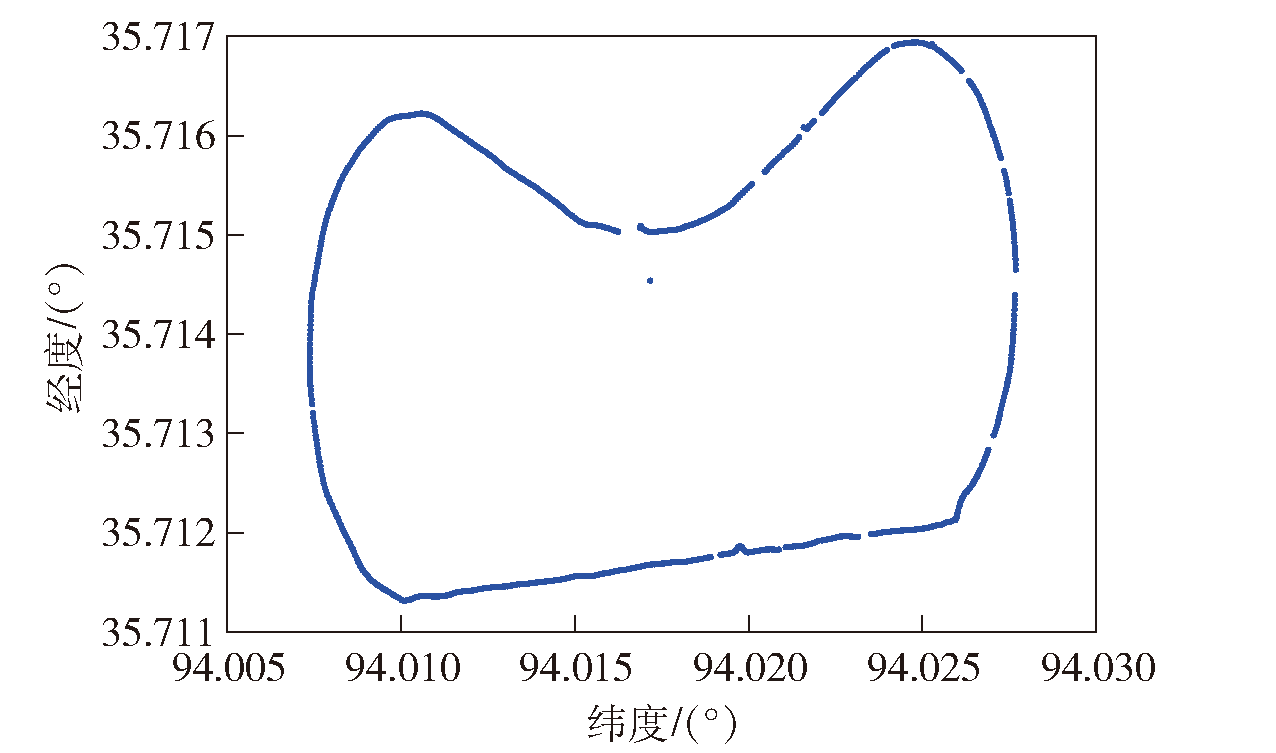
图12 试验测试的轨迹定位信息
Fig.12 Trajectory positioning information in test
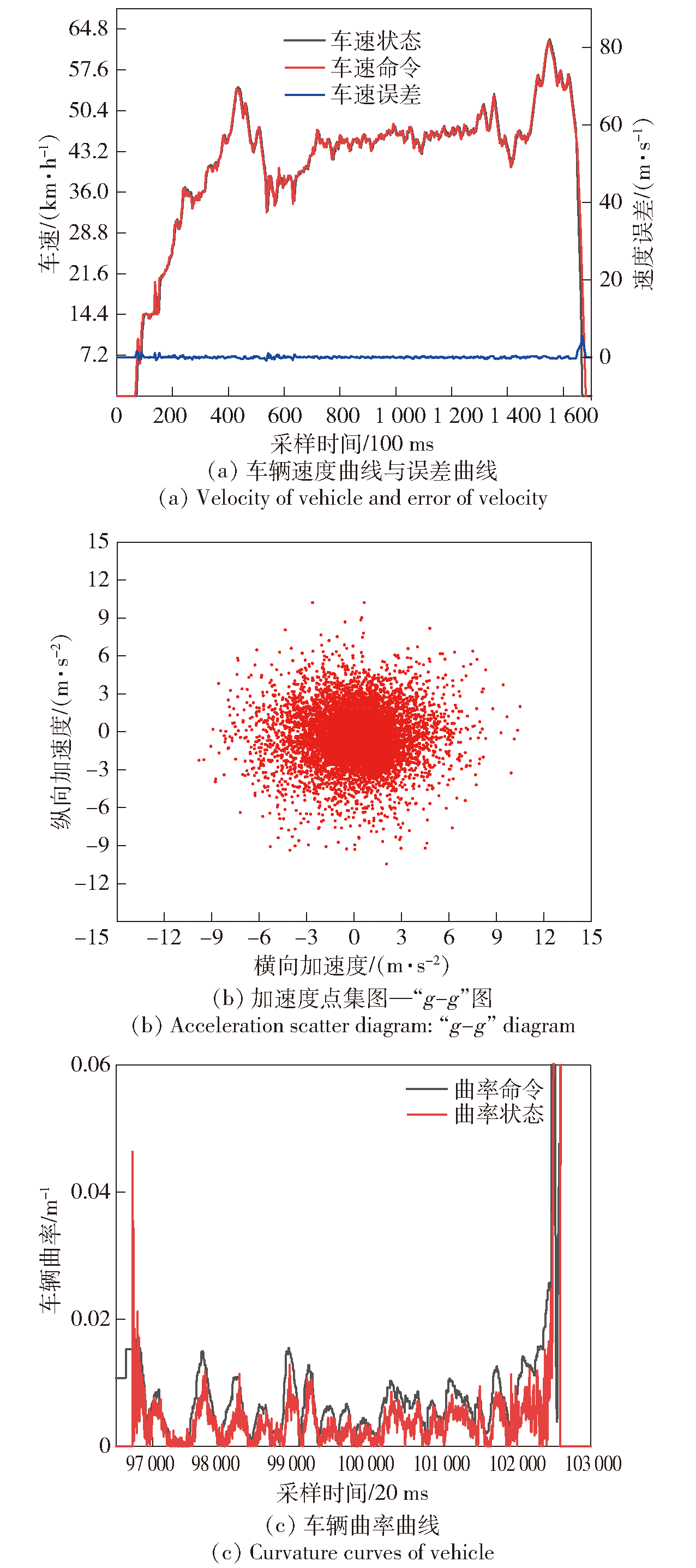
图13 综合性能测试结果
Fig.13 Results of comprehensive performance test

图14 稳定性能测试结果对比
Fig.14 Comparison of stability performance test results

图15 分布式电机驱动力矩分配效果对比
Fig.15 Comparison of distributed driving motor torque allocation effects
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
doi: 10.1109/TVT.25 URL |
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1142/S2301385023500176 URL |
| [8] |
doi: 10.1109/MITS.5117645 URL |
| [9] |
|
| [10] |
doi: 10.1016/j.jterra.2021.03.003 URL |
| [11] |
doi: 10.1007/s11227-022-04565-6 |
| [12] |
doi: 10.1002/rob.v23:9 URL |
| [13] |
doi: 10.1080/00423114.2018.1537494 URL |
| [14] |
doi: 10.1109/TVT.2022.3196315 URL |
| [15] |
|
| [16] |
|
| [17] |
doi: 10.1109/TITS.2021.3086397 URL |
| [18] |
doi: 10.1109/OJITS.2022.3181510 URL |
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1109/TCST.87 URL |
| [22] |
胡宇辉, 王旭, 胡家铭, 等. 越野环境下无人驾驶车辆技术研究综述[J]. 北京理工大学学报, 2021, 41(11): 1137-1144.
|
|
|
|
| [23] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3): 11-18.
|
|
|
|
| [28] |
doi: 10.1016/j.ymssp.2019.01.005 URL |
| [29] |
付苗苗. 高速无人车辆极限包络特性与轨迹跟踪方法研究[D]. 北京: 北京理工大学, 2016.
|
|
|
|
| [30] |
解云鹏. 极限工况下无人驾驶车辆运动控制策略研究[D]. 镇江: 江苏大学, 2021.
|
|
|
|
| [31] |
|
| [32] |
|
| [33] |
刘明春. 8×8轮毂电机驱动车辆操纵稳定性分析与控制研究[D]. 北京: 北京理工大学, 2015.
|
|
|
| [1] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [2] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [3] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [4] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [5] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [6] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [7] | 李作轩, 贾良跃, 郝佳, 王超, 王国新, 明振军, 阎艳. 基于多工况关联的无人车辆车身结构轻量化优化设计[J]. 兵工学报, 2023, 44(11): 3529-3542. |
| [8] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [9] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [10] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [11] | 谭颖琦, 许景懿, 熊光明, 李子睿, 陈慧岩. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748. |
| [12] | 李睿, 项昌乐, 王超, 范晶晶, 刘春林. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137. |
| [13] | 邓海鹏, 麻斌, 赵海光, 吕良, 刘宇. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| [14] | 杜广泽, 张旭东, 邹渊, 郑壮壮. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105. |
| [15] | 钱前, 张爱华, 孙艺瑕. 事件驱动多关节机械臂轨迹跟踪自适应鲁棒控制[J]. 兵工学报, 2019, 40(8): 1732-1739. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4