
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 1-11.doi: 10.12382/bgxb.2023.0854
所属专题: 群体协同与自主技术
李兆冬1,2, 赵熙俊1,2, 杨婷婷1,2,*( ), 齐晓隆3, 周昌仪1,2, 张立明3
), 齐晓隆3, 周昌仪1,2, 张立明3
收稿日期:2023-09-02
上线日期:2024-01-10
通讯作者:
基金资助:
LI Zhaodong1,2, ZHAO Xijun1,2, YANG Tingting1,2,*(), QI Xiaolong3, ZHOU Changyi1,2, ZHANG Liming3
Received:2023-09-02
Online:2024-01-10
摘要:
随着人工智能等技术的发展,无人驾驶技术应运而生,越来越多的无人化装备也投入到作战应用中。面对复杂的越野环境,高精地图可以为无人车辆提供丰富的先验信息,辅助无人车辆进行环境感知、路径规划以及决策等,提升无人车辆越野机动能力。分析高精地图标准化、构建、应用等方面的研究现状,面向无人车辆越野环境下的自主机动任务需求,提出越野环境下高精地图的研究目标与技术体系,归纳总结越野环境下高精地图的基础理论与关键技术,并对越野环境下高精地图的应用发展进行了展望,为高精地图在无人驾驶方面的应用提供了参考。
中图分类号:
李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11.
LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments[J]. Acta Armamentarii, 2023, 44(S2): 1-11.
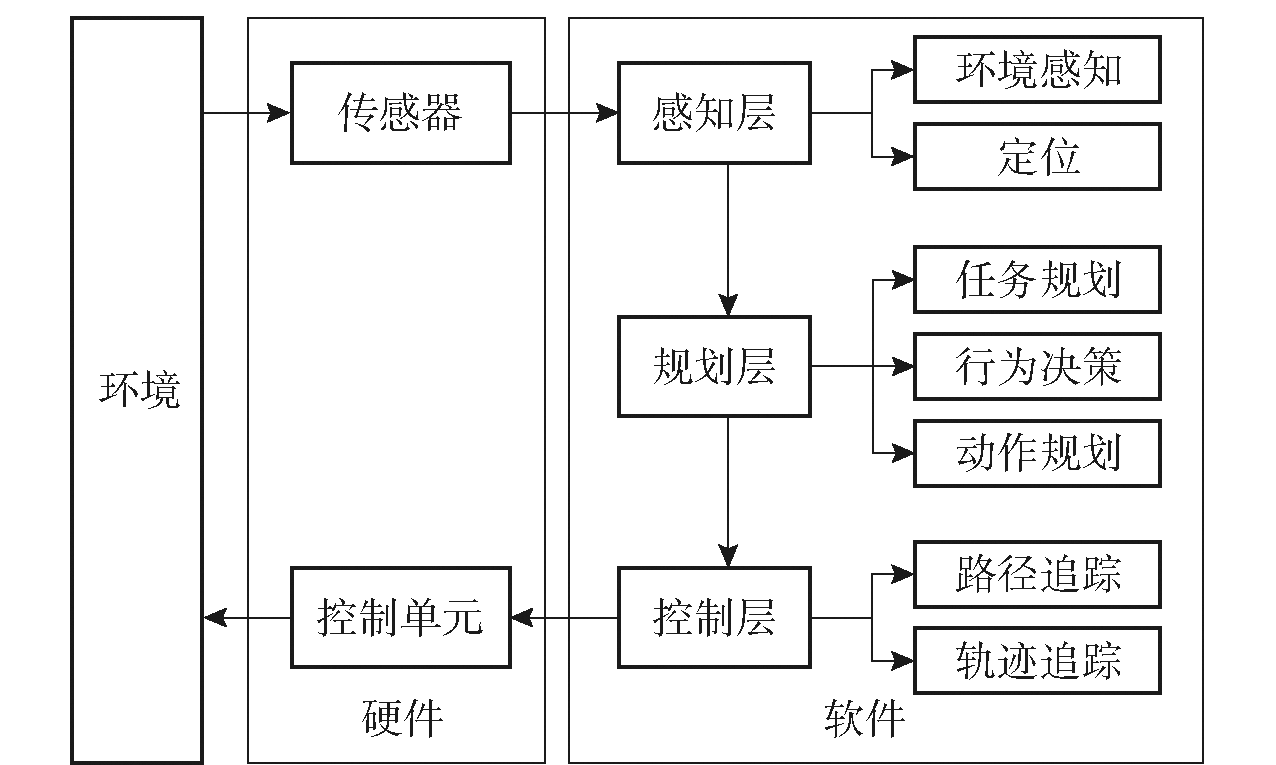
图1 自主导航系统分层架构
Fig.1 Layered architecture of autonomous navigation system
| 地图种类 | 服务对象 | 精度 | 要素和属性 |
|---|---|---|---|
| 高精地图 | 无人车辆 | 亚米级 | 详细的车道模型(曲率、坡度、航向、限高、限重、限宽)、道路部件、定位地物等 |
| 传统电子地图 | 人 | 米级 | 道路、兴趣点 |
表1 高精地图与传统电子地图主要区别
Table 1 The difference between high-definition map and traditional electronic map
| 地图种类 | 服务对象 | 精度 | 要素和属性 |
|---|---|---|---|
| 高精地图 | 无人车辆 | 亚米级 | 详细的车道模型(曲率、坡度、航向、限高、限重、限宽)、道路部件、定位地物等 |
| 传统电子地图 | 人 | 米级 | 道路、兴趣点 |

图2 OpenDRIVE道路结构和交叉口表示
Fig.2 Road structure and intersection representation of OpenDRIVE
| 数据来源 | 优势 | 劣势 |
|---|---|---|
| 众包采集 | 高效率、高实时性、高适应性 | 成本高、数据后处理代价较大 |
| 开源数据集 | 数据质量高、无需后处理 | 数据实时性差、针对性较差 |
| MMS | 数据可定制、成本较低、可针对特殊场景 | 地图覆盖范围小、数据实时性较差、数据采集耗时较多 |
表2 数据采集方法优缺点
Table 2 Advantages and disadvantages of data collection methods
| 数据来源 | 优势 | 劣势 |
|---|---|---|
| 众包采集 | 高效率、高实时性、高适应性 | 成本高、数据后处理代价较大 |
| 开源数据集 | 数据质量高、无需后处理 | 数据实时性差、针对性较差 |
| MMS | 数据可定制、成本较低、可针对特殊场景 | 地图覆盖范围小、数据实时性较差、数据采集耗时较多 |

图3 3D点云地图示意图
Fig.3 Schematic diagram of 3D point cloud map
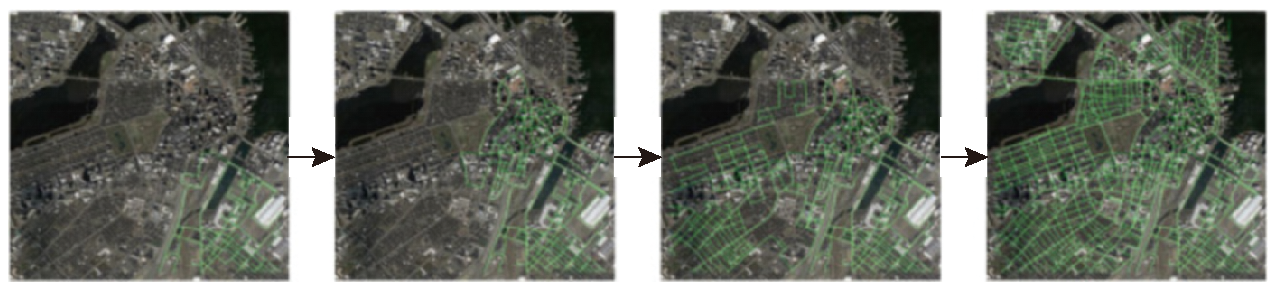
图4 基于迭代增长生成路网(绿色表示路网结构)[37]
Fig.4 Generating road networks based on iterative growth(Green represents the road network structure)[37]

图5 “天-空-地”数据融合
Fig.5 Data fusion of space-air-ground
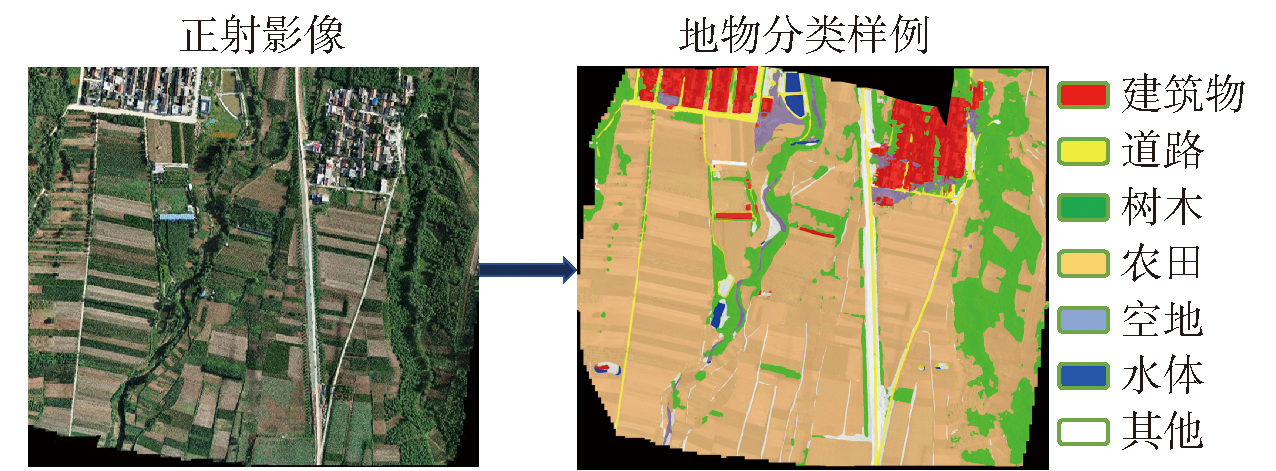
图6 地图要素提取分类效果
Fig.6 Effect of map feature extraction and classification
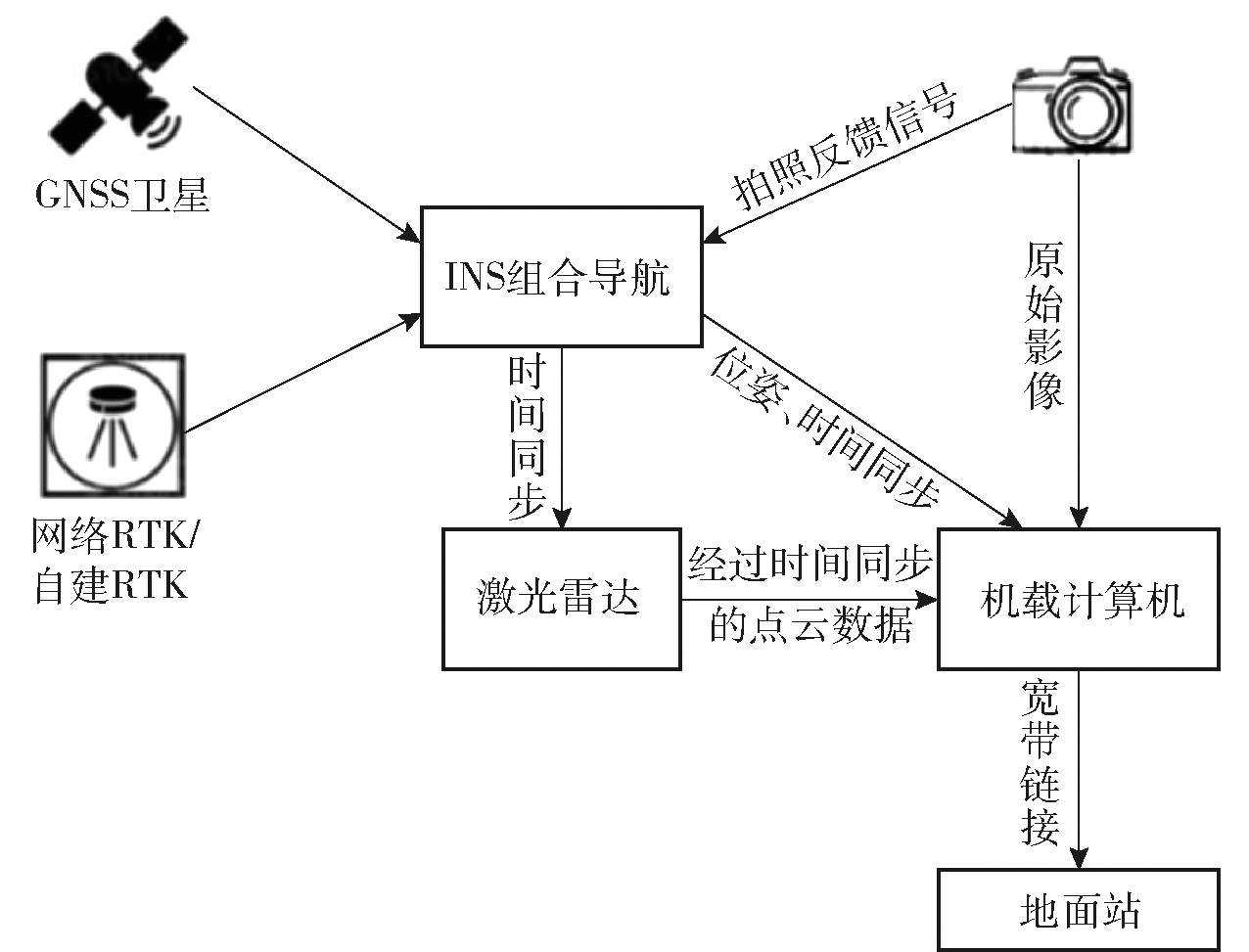
图7 实时点云框架
Fig.7 Framework for real-time point clouds

图8 无人机3D真彩色点云效果
Fig.8 Effect of UAV 3D true color point cloud

图9 无人车自主导航系统
Fig.9 Autonomous navigation system for unmanned vehicles
| [1] |
王涛, 陈艳丽, 贾双成. 简述高精地图的特点[J]. 软件, 2018, 39(9):183-187.
|
|
|
|
| [2] |
王彬. 基于多传感器融合的高精度地图生成方法研究[D]. 重庆: 重庆大学, 2022:1-6.
|
|
|
|
| [3] |
doi: 10.1109/TIV.2022.3223131 URL |
| [4] |
doi: 10.1109/TITS.2015.2389237 URL |
| [5] |
doi: 10.1109/TITS.2013.2291395 URL |
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
王淞. 特定场景轻量级高精地图设计[D]. 重庆: 重庆邮电大学, 2022.
|
|
|
|
| [10] |
吕钊凤, 李峥嵘. 无人驾驶,地图先行——盘点中国19家高精度地图厂商[J]. 智能网联汽车, 2019(4):22-28.
|
|
|
|
| [11] |
黄琛, 尹彤, 王建明. 高精度地图标准化建设探讨[J]. 中国标准化, 2021(21):89-93.
|
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
ISO/TC204. Intelligent transport systems—geographic data files(GDF)—GDF 5.1-part 2: map data used in automated driving systems, cooperative ITS, and multimodal transport: ISO 20524-2:2020[S]. Warrendale, PA, US: International Standards Organization, 2020.
|
| [16] |
ISO/TC204. Intelligent transport systems—geographic data files(GDF)—GDF5.0: ISO 14825:2011[S]. Warrendale, PA, US: International Standards Organization, 2011.
|
| [17] |
|
| [18] |
周勇, 刘尚魁. 构建基于 Appollo 的高精度地图解决方案[J]. 电子技术与软件工程, 2018(21):139.
|
|
|
|
| [19] |
张晓华. 高精度地图为自主泊车保驾护航[C]// 卫星导航定位与北斗系统应用 2019——北斗服务全球融合创新应用. 北京: 测绘出版社, 2019:130-133.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
HERE, 2021. Map data | static map API[Online]. Available: https://www.here.com/platform/map-data.
|
| [23] |
doi: 10.1177/0278364913491297 URL |
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
doi: 10.1109/LRA.2021.3064227 URL |
| [29] |
doi: 10.1109/TRO.2022.3141876 URL |
| [30] |
|
| [31] |
doi: 10.3390/rs14030613 URL |
| [32] |
|
| [33] |
|
| [34] |
doi: 10.1016/j.sigpro.2019.03.019 URL |
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
仲跻炜, 陈大吾, 朱峰. 基于北斗高精度定位和车道级高精度地图的车辆监控平台设计与实现[J]. 全球定位系统, 2015, 40(4):50-55.
|
|
|
|
| [44] |
李亮. 基于点云匹配的智能车定位方法研究[D]. 上海: 上海交通大学, 2018:1-10.
|
|
|
|
| [45] |
王一文, 钱闯, 唐健, 等. 预建高精度地图的封闭区域UGV 自动驾驶导航定位[J]. 测绘通报, 2020(1):21-25.
doi: 10.13474/j.cnki.11-2246.2020.0005 |
|
|
|
| [46] |
周涛. 单目视觉下车道线检测与跟踪算法的研究与测试[D]. 武汉: 华中师范大学, 2016:1-5.
|
|
|
|
| [47] |
胡钊政, 孙莹妹, 李祎承. 路面路标高精度地图构建与多尺度车辆定位[J]. 哈尔滨工业大学学报, 2019, 51(9):149-156.
|
|
|
|
| [48] |
祖似杰, 张攀, 罗跃军. 基于车道驾驶态势的拓扑构建与路径规划[J]. 地理空间信息, 2018, 16(5):53-56.
|
|
|
|
| [49] |
訾烨, 任明武. 一种基于高精度地图匹配误差的路径规划方法[J]. 计算机与数字工程, 2021, 49(11):2248-2253.
|
|
|
|
| [50] |
陈根. 移动测量技术在高精度地图数据生产方面的应用分析[J]. 城市建设理论研究(电子版), 2018(5):104-105.
|
|
|
|
| [51] |
曹波. 基于多传感器的高精度地图生成技术研究[J]. 内燃机与配件, 2019(16):133-135.
|
|
|
|
| [52] |
|
| [53] |
doi: 10.3390/rs14236033 URL |
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
doi: 10.3390/wevj12040227 URL |
| [61] |
doi: 10.3390/s22166198 URL |
| [1] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [2] | 熊光明, 于全富, 胡秀中, 周子杰, 许佳慧. 考虑平台特性的多层建筑物内履带式无人平台运动规划[J]. 兵工学报, 2023, 44(3): 841-850. |
| [3] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| [4] | 李作轩, 贾良跃, 郝佳, 王超, 王国新, 明振军, 阎艳. 基于多工况关联的无人车辆车身结构轻量化优化设计[J]. 兵工学报, 2023, 44(11): 3529-3542. |
| [5] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [6] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [7] | 刘龙龙, 陈慧岩, 刘海鸥, 关海杰, 卢佳兴. 基于拓扑路网的多挡无人履带平台路径重规划[J]. 兵工学报, 2023, 44(1): 279-289. |
| [8] | 戴宗武, 张少甫, 刘乃强, 胡月, 王喆, 段岑薇, 孙宇哲. 用于自主导航的SAR/多普勒雷达一体化技术设计[J]. 兵工学报, 2022, 43(12): 3093-3102. |
| [9] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [10] | 谭颖琦, 许景懿, 熊光明, 李子睿, 陈慧岩. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748. |
| [11] | 田洪清, 王建强, 黄荷叶, 丁峰. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505. |
| [12] | 刘聪, 刘辉, 韩立金, 陈科. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10): 2102-2113. |
| [13] | 杜广泽, 张旭东, 邹渊, 郑壮壮. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105. |
| [14] | 赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4): 680-688. |
| [15] | 刘忠泽, 陈慧岩, 崔星, 熊光明, 王羽纯, 陶溢. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4