
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3529-3542.doi: 10.12382/bgxb.2022.1301
所属专题: 群体协同与自主技术
• • 上一篇
李作轩1, 贾良跃2,3, 郝佳1,*( ), 王超4, 王国新1, 明振军1, 阎艳1
), 王超4, 王国新1, 明振军1, 阎艳1
收稿日期:2022-12-30
上线日期:2023-06-14
通讯作者:
基金资助:
LI Zuoxuan1, JIA Liangyue2,3, HAO Jia1,*(), WANG Chao4, WANG Guoxin1, MING Zhenjun1, YAN Yan1
Received:2022-12-30
Online:2023-06-14
摘要:
未来战场的多样化对特种无人车辆的环境适应性提出了更高的要求。为满足特种无人车辆的多工况使用、高机动能力与低成本研制等要求,采用多工况关联设计与轻量化优化的思路对无人车桁架车身结构进行优化设计。考虑到多工况的车身结构设计变量多、设计空间大,面临仿真次数过多的问题,提出基于多工况关联的车身结构轻量化优化方法,利用设计变量区间缩减策略减小设计空间;引入高斯过程代理模型替换仿真分析实现结构设计方案性能的快速评估;结合遗传算法实现方案的优化。实验结果表明,最终优化方案在通过车身刚度强度和模态等多学科性能仿真验证的情况下,质量比初始方案降低14.12%,比只用高斯过程优化设计的方案降低8.87%。
中图分类号:
李作轩, 贾良跃, 郝佳, 王超, 王国新, 明振军, 阎艳. 基于多工况关联的无人车辆车身结构轻量化优化设计[J]. 兵工学报, 2023, 44(11): 3529-3542.
LI Zuoxuan, JIA Liangyue, HAO Jia, WANG Chao, WANG Guoxin, MING Zhenjun, YAN Yan. Lightweight Optimization Design of Unmanned Vehicle Body Structure Based on Multi-working Conditions Correlation[J]. Acta Armamentarii, 2023, 44(11): 3529-3542.

图1 某无人车辆桁架车身结构模型
Fig.1 Truss body structure model of an unmanned vehicle
| 车身结构、工况 环境及车身材料 | 设计参数 | 取值范围 |
|---|---|---|
| L/mm | 3620~3820 | |
| W/mm | 1300~1500 | |
| H/mm | 620~820 | |
| T/mm | 2~6 | |
| 车身结构 | L1/mm | 60~80 |
| W1/mm | 40~60 | |
| L2/mm | 40~60 | |
| W2/mm | 20~40 | |
| L3/mm | 20~40 | |
| W3/mm | 10~20 | |
| 冲击工况 | ||
| 制动工况 | ||
| 转弯工况 | ||
| 工况环境 | 7种不同工况类型C | 弯曲工况 |
| 扭转1轮工况 | ||
| 扭转2轮工况 | ||
| 射击工况 | ||
| 车身材料 | 材料编号M | 碳素钢、铝合金、钛合金 |
表1 无人车桁架式车身结构模型与多工况环境的参数
Table 1 Parameters of truss body structure model of unmanned vehicle and multi-working environment
| 车身结构、工况 环境及车身材料 | 设计参数 | 取值范围 |
|---|---|---|
| L/mm | 3620~3820 | |
| W/mm | 1300~1500 | |
| H/mm | 620~820 | |
| T/mm | 2~6 | |
| 车身结构 | L1/mm | 60~80 |
| W1/mm | 40~60 | |
| L2/mm | 40~60 | |
| W2/mm | 20~40 | |
| L3/mm | 20~40 | |
| W3/mm | 10~20 | |
| 冲击工况 | ||
| 制动工况 | ||
| 转弯工况 | ||
| 工况环境 | 7种不同工况类型C | 弯曲工况 |
| 扭转1轮工况 | ||
| 扭转2轮工况 | ||
| 射击工况 | ||
| 车身材料 | 材料编号M | 碳素钢、铝合金、钛合金 |
| 材料名称 | 质量密度/(t·mm-3) | 弹性模量/MPa | 泊松比 |
|---|---|---|---|
| 碳素钢 | 7.80×10-9 | 2.01×105 | 0.26 |
| 铝合金 | 2.78×10-9 | 0.70×105 | 0.26 |
| 钛合金 | 4.50×10-9 | 1.10×105 | 0.34 |
表2 不同材料性能参数
Table 2 Property parameters of different materials
| 材料名称 | 质量密度/(t·mm-3) | 弹性模量/MPa | 泊松比 |
|---|---|---|---|
| 碳素钢 | 7.80×10-9 | 2.01×105 | 0.26 |
| 铝合金 | 2.78×10-9 | 0.70×105 | 0.26 |
| 钛合金 | 4.50×10-9 | 1.10×105 | 0.34 |

图2 车身结构静态载荷施加
Fig.2 Static load applied on body structure

图3 不同工况载荷施加
Fig.3 Load application under different working conditions
| 工况类型 | 约束方向 | 载荷施加 | |||
|---|---|---|---|---|---|
| 左侧前轮 | 右侧前轮 | 左侧后轮 | 右侧后轮 | ||
| 冲击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 6g的Y轴方向全局载荷 |
| 制动工况 | X,Y,Z | X,Y,Z | Y,Z | Y,Z | 0.8g的X轴方向全局载荷 |
| 转弯工况 | X,Y,Z | X,Y | X,Y,Z | X,Y | 0.7g的Z轴方向全局载荷 |
| 弯曲工况 | X,Y | X,Y | Y,Z | Y,Z | 3g的Y轴方向全局载荷 |
| 扭转1轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y,Z | 6g的Y轴方向全局载荷 |
| 扭转2轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y | 3g的Y轴方向全局载荷 |
| 射击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 3g的Y轴方向载荷外,还需要在顶端 射击开口处施加30kN压力 |
表3 7种不同工况约束和载荷
Table 3 Constraints and loads in 7 different working conditions
| 工况类型 | 约束方向 | 载荷施加 | |||
|---|---|---|---|---|---|
| 左侧前轮 | 右侧前轮 | 左侧后轮 | 右侧后轮 | ||
| 冲击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 6g的Y轴方向全局载荷 |
| 制动工况 | X,Y,Z | X,Y,Z | Y,Z | Y,Z | 0.8g的X轴方向全局载荷 |
| 转弯工况 | X,Y,Z | X,Y | X,Y,Z | X,Y | 0.7g的Z轴方向全局载荷 |
| 弯曲工况 | X,Y | X,Y | Y,Z | Y,Z | 3g的Y轴方向全局载荷 |
| 扭转1轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y,Z | 6g的Y轴方向全局载荷 |
| 扭转2轮工况 | X,Y,Z | X,Y,Z | X,Y | X,Y | 3g的Y轴方向全局载荷 |
| 射击工况 | X,Y,Z | X,Y,Z | X,Y,Z | X,Y,Z | 3g的Y轴方向载荷外,还需要在顶端 射击开口处施加30kN压力 |

图4 方法总体步骤
Fig.4 Overall steps of optimization method

图5 设计空间动态缩减
Fig.5 Design space dynamic reduction
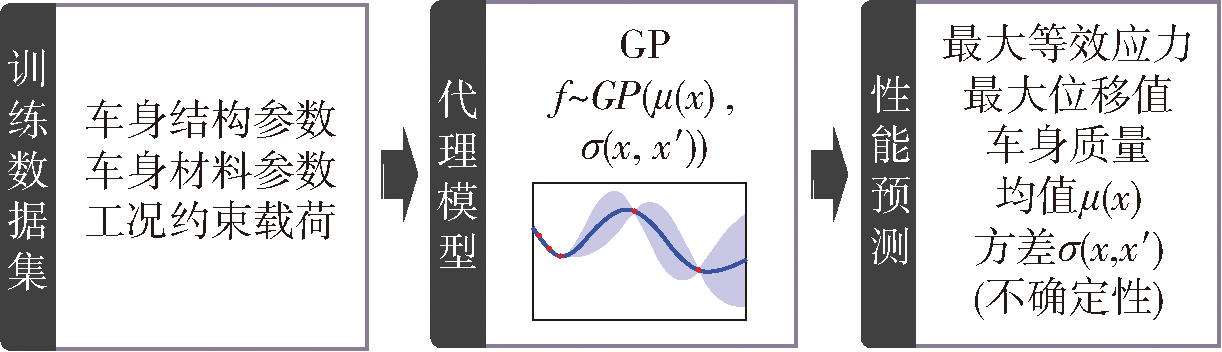
图6 构建GP代理模型
Fig.6 Construction of Gaussian process surrogate model

图7 变量区间缩减方法
Fig.7 Variable interval reduction method

图8 基于GA的多工况车身结构优化
Fig.8 Multi-condition body structure optimization based on genetic algorithm
| 超参数名称 | 取值 |
|---|---|
| 种群数目 | 500 |
| 遗传代数 | 500 |
| 交叉概率 | 0.7 |
| 变异概率 | 0.2 |
| 精英策略 | 每代保留最好的1个点 |
表4 GA超参数
Table 4 GA superparameters
| 超参数名称 | 取值 |
|---|---|
| 种群数目 | 500 |
| 遗传代数 | 500 |
| 交叉概率 | 0.7 |
| 变异概率 | 0.2 |
| 精英策略 | 每代保留最好的1个点 |
| 工况类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 5.07 | 5.07 | 98 | ||
| 制动工况 | 7.79 | 4.29 | 98 | ||
| 转弯工况 | 4.97 | 6.25 | 98 | ||
| 弯曲工况 | 6.55 | 5.13 | 98 | ||
| 扭转1轮工况 | 7.28 | 7.51 | 98 | ||
| 扭转2轮工况 | 11.40 | 4.80 | 78 | ||
| 射击工况 | 11.90 | 5.51 | 90 | ||
表5 代理模型车身最大应力预测误差
Table 5 Predicted maximum stress errors of the surrogate model
| 工况类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 5.07 | 5.07 | 98 | ||
| 制动工况 | 7.79 | 4.29 | 98 | ||
| 转弯工况 | 4.97 | 6.25 | 98 | ||
| 弯曲工况 | 6.55 | 5.13 | 98 | ||
| 扭转1轮工况 | 7.28 | 7.51 | 98 | ||
| 扭转2轮工况 | 11.40 | 4.80 | 78 | ||
| 射击工况 | 11.90 | 5.51 | 90 | ||
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0.63 | 6.72 | 98 | ||
| 制动工况 | 0.94 | 6.72 | 92 | ||
| 转弯工况 | 0.81 | 4.73 | 78 | 98 | |
| 弯曲工况 | 1.29 | 7.23 | 90 | ||
| 扭转1轮工况 | 1.91 | 5.58 | 90 | ||
| 扭转2轮工况 | 1.95 | 2.89 | 96 | ||
| 射击工况 | 1.99 | 4.66 | 86 | ||
表6 代理模型车身最大位移预测误差
Table 6 Predicted maximum displacement errors of the surrogate model
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0.63 | 6.72 | 98 | ||
| 制动工况 | 0.94 | 6.72 | 92 | ||
| 转弯工况 | 0.81 | 4.73 | 78 | 98 | |
| 弯曲工况 | 1.29 | 7.23 | 90 | ||
| 扭转1轮工况 | 1.91 | 5.58 | 90 | ||
| 扭转2轮工况 | 1.95 | 2.89 | 96 | ||
| 射击工况 | 1.99 | 4.66 | 86 | ||
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0 | 0.64 | 100 | ||
| 制动工况 | 0 | 0.62 | 86 | ||
| 转弯工况 | 0.09 | 1.20 | 98 | ||
| 弯曲工况 | 0.04 | 0.75 | 100 | ||
| 扭转1轮工况 | 0.01 | 0.88 | 90 | ||
| 扭转2轮工况 | 2.08 | 1.07 | 96 | ||
| 射击工况 | 0.54 | 1.18 | 96 | ||
表7 代理模型车身质量预测误差
Table 7 Predicted body mass errors of the surrogate model
| 工况 类型 | 预测误差/% | 预测正确率/% | |||
|---|---|---|---|---|---|
| RDS-GP | GP | ANN | RDS-GP | GP | |
| 冲击工况 | 0 | 0.64 | 100 | ||
| 制动工况 | 0 | 0.62 | 86 | ||
| 转弯工况 | 0.09 | 1.20 | 98 | ||
| 弯曲工况 | 0.04 | 0.75 | 100 | ||
| 扭转1轮工况 | 0.01 | 0.88 | 90 | ||
| 扭转2轮工况 | 2.08 | 1.07 | 96 | ||
| 射击工况 | 0.54 | 1.18 | 96 | ||

图9 代理模型预测误差变化趋势
Fig.9 Changing trend of predicted errors of the surrogate model
| 参数变量及优化目标 | RDS-GP | GP | ANN | |
|---|---|---|---|---|
| L | 3620.01 | 3620.00 | 3621.17 | |
| W | 1300.00 | 1318.95 | 1300.00 | |
| H | 620.00 | 720.00 | 620.01 | |
| L1 | 60.00 | 65.81 | 75.83 | |
| W1 | 51.26 | 50.00 | 52.20 | |
| 参数变量 | L2 | 51.26 | 50.00 | 52.20 |
| W2 | 36.69 | 39.28 | 39.98 | |
| L3 | 36.69 | 39.28 | 39.98 | |
| W3 | 15.00 | 14.68 | 19.98 | |
| T | 5.00 | 5.07 | 4.00 | |
| M | 碳素钢 | 碳素钢 | 碳素钢 | |
| 优化目标 | Mass | 445.45 | 486.88 | 380.93 |
表8 不同车身结构优化方案结果对比
Table 8 Comparison of different optimal body structure schemes
| 参数变量及优化目标 | RDS-GP | GP | ANN | |
|---|---|---|---|---|
| L | 3620.01 | 3620.00 | 3621.17 | |
| W | 1300.00 | 1318.95 | 1300.00 | |
| H | 620.00 | 720.00 | 620.01 | |
| L1 | 60.00 | 65.81 | 75.83 | |
| W1 | 51.26 | 50.00 | 52.20 | |
| 参数变量 | L2 | 51.26 | 50.00 | 52.20 |
| W2 | 36.69 | 39.28 | 39.98 | |
| L3 | 36.69 | 39.28 | 39.98 | |
| W3 | 15.00 | 14.68 | 19.98 | |
| T | 5.00 | 5.07 | 4.00 | |
| M | 碳素钢 | 碳素钢 | 碳素钢 | |
| 优化目标 | Mass | 445.45 | 486.88 | 380.93 |
| 工况类型及 优化目标 | RDS-GP | GP | ANN | ||||
|---|---|---|---|---|---|---|---|
| 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | ||
| 冲击工况 | Str | 75.65 | 73.19 | 70.20 | 87.27 | 93.81 | 82.50 |
| Dis | 2.28 | 2.26 | 2.00 | 2.39 | 1.92 | 2.51 | |
| 制动工况 | Str | 62.84 | 60.02 | 58.04 | 59.84 | 73.47 | 69.59 |
| Dis | 1.71 | 1.71 | 1.56 | 1.87 | 1.66 | 1.94 | |
| 转弯工况 | Str | 62.84 | 59.59 | 60.33 | 59.32 | 71.65 | 69.28 |
| Dis | 1.69 | 1.69 | 1.42 | 1.84 | 1.46 | 1.90 | |
| 弯曲工况 | Str | 73.36 | 66.06 | 61.57 | 65.61 | 76.44 | 75.32 |
| Dis | 2.03 | 2.01 | 1.80 | 2.15 | 2.04 | 2.27 | |
| 扭转1轮 | Str | 105.83 | 90.63 | 91.22 | 101.24 | 97.81 | 102.84 |
| 工况 | Dis | 3.14 | 3.22 | 3.76 | 3.27 | 3.05 | 3.60 |
| 扭转2轮 | Str | 125.83 | 121.06 | 102.41 | 118.58 | 149.44 | 143.40 |
| 工况 | Dis | 3.92 | 3.93 | 3.89 | 3.90 | 4.01 | 4.81 |
| 射击工况 | Str | 66.76 | 68.44 | 68.67 | 67.75 | 90.39 | 78.45 |
| Dis | 2.01 | 2.01 | 1.90 | 2.15 | 1.47 | 2.24 | |
| 优化目标 | Mass | 445.45 | 445.44 | 486.88 | 485.46 | 380.93 | 379.60 |
表9 代理模型预测和仿真模型评估对比
Table 9 Comparison of surrogate model prediction and simulation model evaluation
| 工况类型及 优化目标 | RDS-GP | GP | ANN | ||||
|---|---|---|---|---|---|---|---|
| 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | 代理 模型 | 仿真 模型 | ||
| 冲击工况 | Str | 75.65 | 73.19 | 70.20 | 87.27 | 93.81 | 82.50 |
| Dis | 2.28 | 2.26 | 2.00 | 2.39 | 1.92 | 2.51 | |
| 制动工况 | Str | 62.84 | 60.02 | 58.04 | 59.84 | 73.47 | 69.59 |
| Dis | 1.71 | 1.71 | 1.56 | 1.87 | 1.66 | 1.94 | |
| 转弯工况 | Str | 62.84 | 59.59 | 60.33 | 59.32 | 71.65 | 69.28 |
| Dis | 1.69 | 1.69 | 1.42 | 1.84 | 1.46 | 1.90 | |
| 弯曲工况 | Str | 73.36 | 66.06 | 61.57 | 65.61 | 76.44 | 75.32 |
| Dis | 2.03 | 2.01 | 1.80 | 2.15 | 2.04 | 2.27 | |
| 扭转1轮 | Str | 105.83 | 90.63 | 91.22 | 101.24 | 97.81 | 102.84 |
| 工况 | Dis | 3.14 | 3.22 | 3.76 | 3.27 | 3.05 | 3.60 |
| 扭转2轮 | Str | 125.83 | 121.06 | 102.41 | 118.58 | 149.44 | 143.40 |
| 工况 | Dis | 3.92 | 3.93 | 3.89 | 3.90 | 4.01 | 4.81 |
| 射击工况 | Str | 66.76 | 68.44 | 68.67 | 67.75 | 90.39 | 78.45 |
| Dis | 2.01 | 2.01 | 1.90 | 2.15 | 1.47 | 2.24 | |
| 优化目标 | Mass | 445.45 | 445.44 | 486.88 | 485.46 | 380.93 | 379.60 |
| 参数变量及 优化目标 | RDS-GP | GP | ||
|---|---|---|---|---|
| 最优方案 均值 | 最优方案 方差 | 最优方案 均值 | 最优方案 方差 | |
| L | 3620.00 | 0.00 | 3635.61 | 1764.81 |
| W | 1300.00 | 0.00 | 1336.01 | 1135.66 |
| H | 620.00 | 0.00 | 708.92 | 691.78 |
| L1 | 60.00 | 0.00 | 64.53 | 5.13 |
| W1 | 51.32 | 1.10 | 48.76 | 1.29 |
| L2 | 51.32 | 1.10 | 48.76 | 1.29 |
| W2 | 36.77 | 0.13 | 39.29 | 0.14 |
| L3 | 36.77 | 0.13 | 39.29 | 0.14 |
| W3 | 15.85 | 3.93 | 14.01 | 2.53 |
| T | 5.00 | 0 | 5.14 | 0.07 |
| M | 碳素钢 | 碳素钢 | 碳素钢 | 碳素钢 |
| Mass | 446.35 | 489.78 | ||
表10 最优方案统计对比
Table 10 Statistical comparison of optimal schemes
| 参数变量及 优化目标 | RDS-GP | GP | ||
|---|---|---|---|---|
| 最优方案 均值 | 最优方案 方差 | 最优方案 均值 | 最优方案 方差 | |
| L | 3620.00 | 0.00 | 3635.61 | 1764.81 |
| W | 1300.00 | 0.00 | 1336.01 | 1135.66 |
| H | 620.00 | 0.00 | 708.92 | 691.78 |
| L1 | 60.00 | 0.00 | 64.53 | 5.13 |
| W1 | 51.32 | 1.10 | 48.76 | 1.29 |
| L2 | 51.32 | 1.10 | 48.76 | 1.29 |
| W2 | 36.77 | 0.13 | 39.29 | 0.14 |
| L3 | 36.77 | 0.13 | 39.29 | 0.14 |
| W3 | 15.85 | 3.93 | 14.01 | 2.53 |
| T | 5.00 | 0 | 5.14 | 0.07 |
| M | 碳素钢 | 碳素钢 | 碳素钢 | 碳素钢 |
| Mass | 446.35 | 489.78 | ||

图10 迭代次数对比
Fig.10 Comparison of iteration times
| 工况类型 | 最大应力/MPa | 最大位移/mm |
|---|---|---|
| 冲击工况 | 71.78 | 2.25 |
| 制动工况 | 58.90 | 1.70 |
| 转弯工况 | 58.46 | 1.68 |
| 弯曲工况 | 64.80 | 2.00 |
| 扭转1轮工况 | 89.94 | 3.20 |
| 扭转2轮工况 | 120.66 | 3.91 |
| 射击工况 | 67.15 | 2.00 |
表11 桁架车身结构静力学仿真校验
Table 11 Static simulation check of truss body structure
| 工况类型 | 最大应力/MPa | 最大位移/mm |
|---|---|---|
| 冲击工况 | 71.78 | 2.25 |
| 制动工况 | 58.90 | 1.70 |
| 转弯工况 | 58.46 | 1.68 |
| 弯曲工况 | 64.80 | 2.00 |
| 扭转1轮工况 | 89.94 | 3.20 |
| 扭转2轮工况 | 120.66 | 3.91 |
| 射击工况 | 67.15 | 2.00 |

图11 桁架车身结构静力学仿真分析(放大46倍)
Fig.11 Static simulation analysis of truss body structure (46×)
| 阶数 | 固有频率/Hz |
|---|---|
| 1 | 37.24 |
| 2 | 60.29 |
| 3 | 61.42 |
| 4 | 71.13 |
| 5 | 81.35 |
| 6 | 89.39 |
| 7 | 91.34 |
| 8 | 95.58 |
| 9 | 99.59 |
| 10 | 102.99 |
表12 桁架车身结构动力学仿真校验
Table 12 Dynamic simulation check of truss body structure
| 阶数 | 固有频率/Hz |
|---|---|
| 1 | 37.24 |
| 2 | 60.29 |
| 3 | 61.42 |
| 4 | 71.13 |
| 5 | 81.35 |
| 6 | 89.39 |
| 7 | 91.34 |
| 8 | 95.58 |
| 9 | 99.59 |
| 10 | 102.99 |

图12 桁架车身结构模态仿真分析(放大20倍)
Fig.12 Modal simulation analysis of truss body structure (20×)
| [1] |
doi: 10.18494/SAM4018 URL |
| [2] |
张峰, 程建勇, 董立强, 等. 基于SFECONCEPT的某平台改款车型车身结构轻量化设计[J]. 机械设计, 2022, 39(11):106-111.
|
|
|
|
| [3] |
|
| [4] |
doi: 10.1016/j.compstruc.2009.07.008 URL |
| [5] |
|
| [6] |
王显会, 许刚, 李守成, 等. 特种车辆车架结构拓扑优化设计研究[J]. 兵工学报, 2007, 28(8):903-908.
|
|
|
|
| [7] |
doi: 10.1080/0305215X.2018.1506770 URL |
| [8] |
doi: 10.1007/s00158-019-02410-8 |
| [9] |
|
| [10] |
doi: 10.1016/j.ymssp.2019.106405 URL |
| [11] |
温晶晶, 吴斌, 刘承骛. 导弹整体式翼面骨架结构的拓扑优化设计[J]. 兵工学报, 2017, 38(1):81-88.
doi: 10.3969/j.issn.1000-1093.2017.01.011 |
|
|
|
| [12] |
|
| [13] |
闫闯. 基于局部拓扑优化技术的纯电动汽车车架轻量化研究[D]. 成都: 电子科技大学, 2019:6-16.
|
|
|
|
| [14] |
扶原放, 金达锋, 乔蔚炜. 多工况下微型电动车车身结构拓扑优化设计[J]. 机械设计, 2010(2):77-80.
|
|
|
|
| [15] |
兰凤崇, 赖番结, 陈吉清, 等. 考虑动态特性的多工况车身结构拓扑优化研究[J]. 机械工程学报, 2014, 50(20):122-128.
doi: 10.3901/JME.2014.20.122 |
|
doi: 10.3901/JME.2014.20.122 |
|
| [16] |
邹坤, 侯亮, 卜祥建, 等. 基于工况风险评估的叉车门架多工况拓扑优化[J]. 中国机械工程, 2019, 30(5):568-576,577.
|
|
|
|
| [17] |
|
| [18] |
doi: 10.1016/j.eswa.2021.116104 URL |
| [19] |
doi: 10.1016/j.aei.2020.101123 URL |
| [20] |
doi: 10.1016/j.enganabound.2022.08.001 URL |
| [21] |
谢然, 兰凤崇, 陈吉清, 等. 满足可靠性要求的轻量化车身结构多目标优化方法[J]. 机械工程学报, 2011, 47(4):117-124.
|
|
|
|
| [22] |
史国宏, 陈勇, 杨雨泽, 等. 白车身多学科轻量化优化设计应用[J]. 机械工程学报, 2012, 48(8):110-114.
|
|
|
|
| [23] |
doi: 10.1007/s00158-020-02674-5 |
| [24] |
doi: 10.1007/s00158-017-1778-1 URL |
| [25] |
doi: 10.1039/d0ra03031g pmid: 35517747 |
| [1] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [2] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [3] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| [4] | 张宁, 史金光, 王中原, 赵新新. 基于支持向量回归模型的弹用冲压发动机性能预测及优化[J]. 兵工学报, 2023, 44(10): 2944-2953. |
| [5] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [6] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [7] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [8] | 吴则良, 叶建川,王江,金忍. 基于深度自动编码器神经网络的飞行器翼型参数降维与优化设计[J]. 兵工学报, 2022, 43(6): 1326-1336. |
| [9] | 孙宁, 夏艳, 程行清. 基于光纤陀螺仪检测的精密温控装置优化设计[J]. 兵工学报, 2022, 43(4): 910-918. |
| [10] | 谭颖琦, 许景懿, 熊光明, 李子睿, 陈慧岩. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748. |
| [11] | 马文朝, 孟繁敏, 马诺, 孟军辉, 邹汝平. 跨介质飞行器头部外形优化及入水性能分析[J]. 兵工学报, 2022, 43(10): 2588-2597. |
| [12] | 刘钧圣, 王刚, 王琨, 史宏博, 郭斌. 考虑不确定性的模块化战术导弹优化设计[J]. 兵工学报, 2020, 41(2): 270-279. |
| [13] | 张富毅, 吴钦, 赵晓阳, 刘影, 王国玉. 基于响应面方法的喷水推进器进水流道多目标优化[J]. 兵工学报, 2020, 41(10): 2071-2080. |
| [14] | 杜广泽, 张旭东, 邹渊, 郑壮壮. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105. |
| [15] | 魏巍, 彭卉, 刘旭, 简洪超, 谢文浩, 闫清东, 朱浩月. 液力传动车辆闭锁充油动态缓冲特性优化[J]. 兵工学报, 2019, 40(7): 1358-1364. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4