
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3320-3332.doi: 10.12382/bgxb.2023.0262
所属专题: 群体协同与自主技术
陶俊峰1, 刘海鸥1,*( ), 关海杰1, 陈慧岩1, 臧政1,2
), 关海杰1, 陈慧岩1, 臧政1,2
收稿日期:2023-03-28
上线日期:2023-07-09
通讯作者:
基金资助:
TAO Junfeng1, LIU Hai’ou1,*(), GUAN Haijie1, CHEN Huiyan1, ZANG Zheng1,2
Received:2023-03-28
Online:2023-07-09
摘要:
针对现有路径规划方法对地形特征考虑不足的问题,以无人履带车辆为研究对象,提出一种基于可通行度估计的路径规划方法。基于卷积长短期记忆(Conv LSTM)网络,从连续轨迹上提取激光雷达点云的空间特征和时间关联特征,融合车辆运动特征,估计地形可通行度。基于地形可通行度,改进A*算法的节点扩展方式和代价函数,输出满足无碰撞约束和低可通行代价的离散路点;使用无梯度迭代平滑算法减小路径松弛度和可通行度代价;再使用三次B样条曲线对离散路径进行拟合,输出平滑参考路径。以参考路径建立Frenet坐标系,构建基于可通行度代价的安全走廊,在满足无碰撞约束、低可通行度代价的前提下,在走廊内生成满足车辆运动学约束的平滑路径。试验结果表明,所提出的方法能够充分考虑地形特征,提升路径规划结果的稳定性和可通行性。
中图分类号:
陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332.
TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation[J]. Acta Armamentarii, 2023, 44(11): 3320-3332.

图1 基于可通行度估计的无人履带车辆路径规划框架
Fig.1 Framework of path planning of unmanned tracked vehicle based on terrain traversability estimation
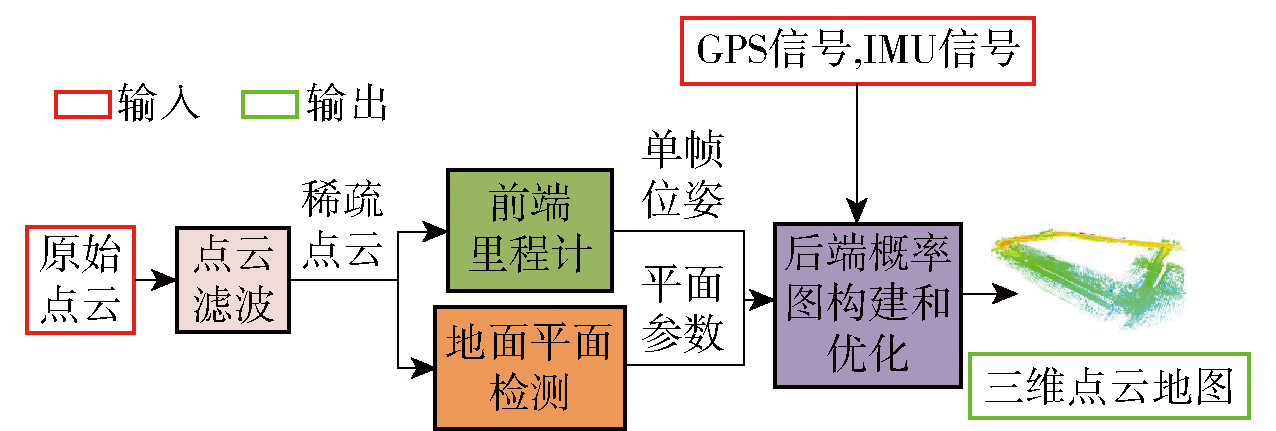
图2 hdl-graph-slam框架
Fig.2 Framework of hdl-graph-slam
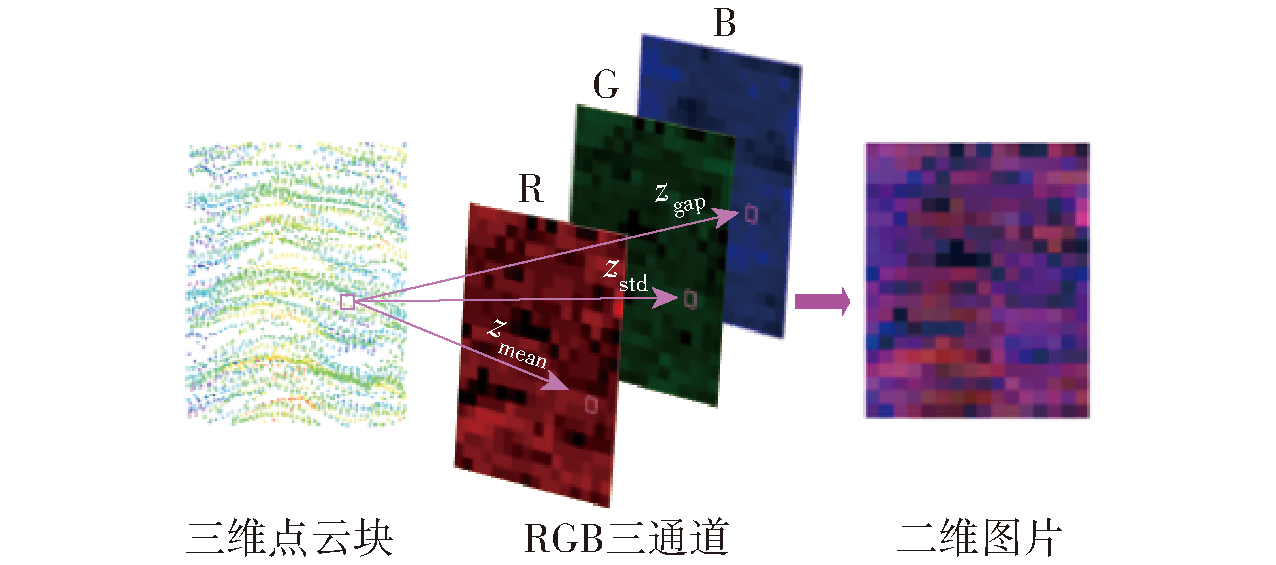
图3 点云转图片
Fig.3 Transformation from 3D point cloud to 2D image
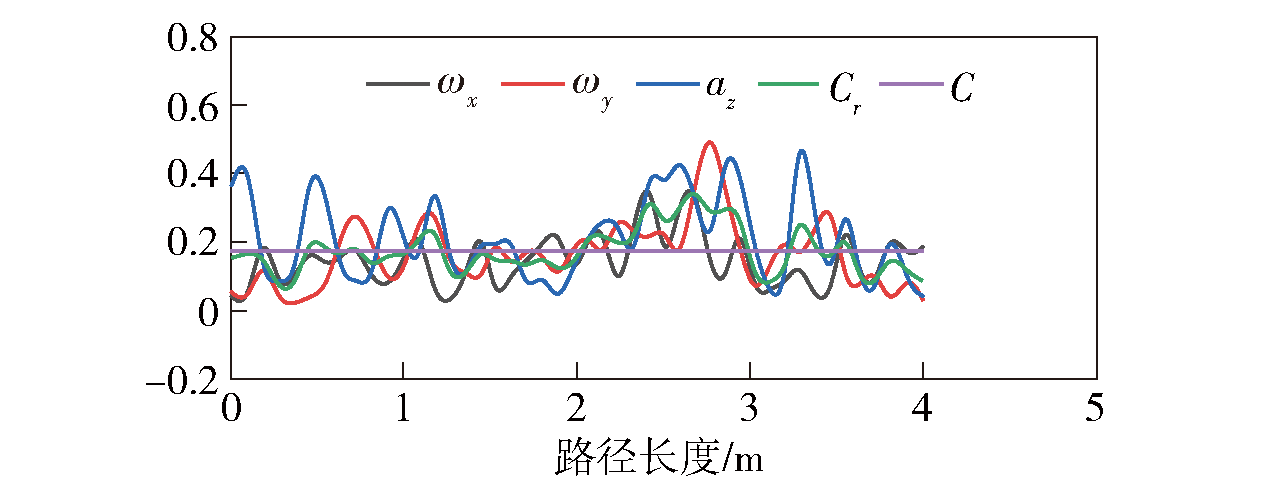
图4 IMU信号处理图
Fig.4 Diagram of IMU signal processing

图5 可通行度估计网络
Fig.5 Traversability estimation network

图6 改进A*搜索
Fig.6 Improved A* search
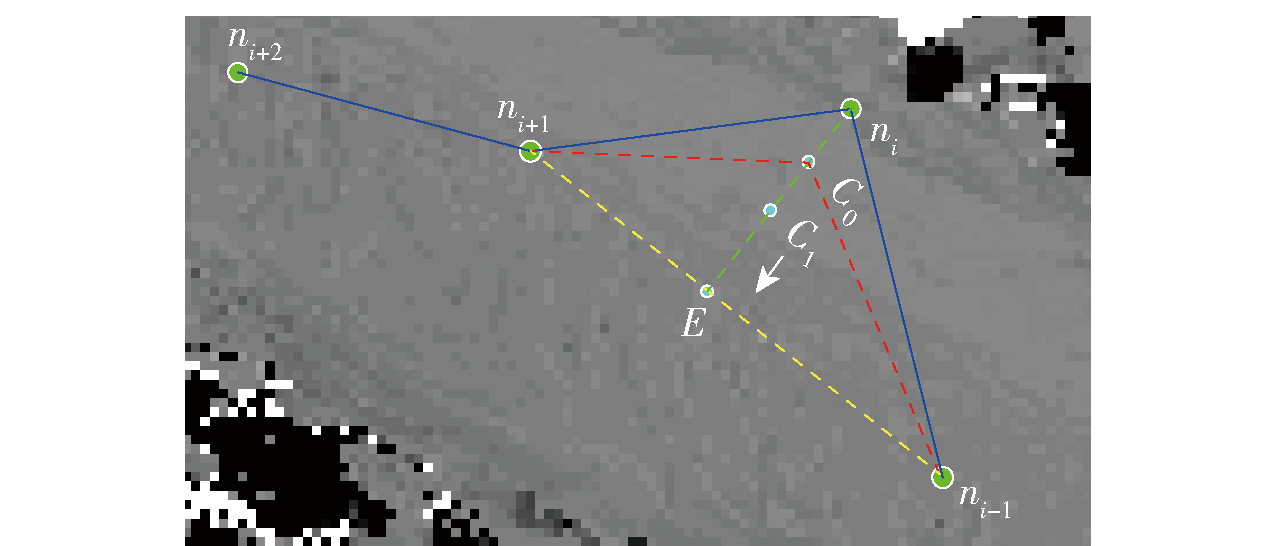
图7 无梯度迭代示意图
Fig.7 Schematic diagram of gradient-free iteration
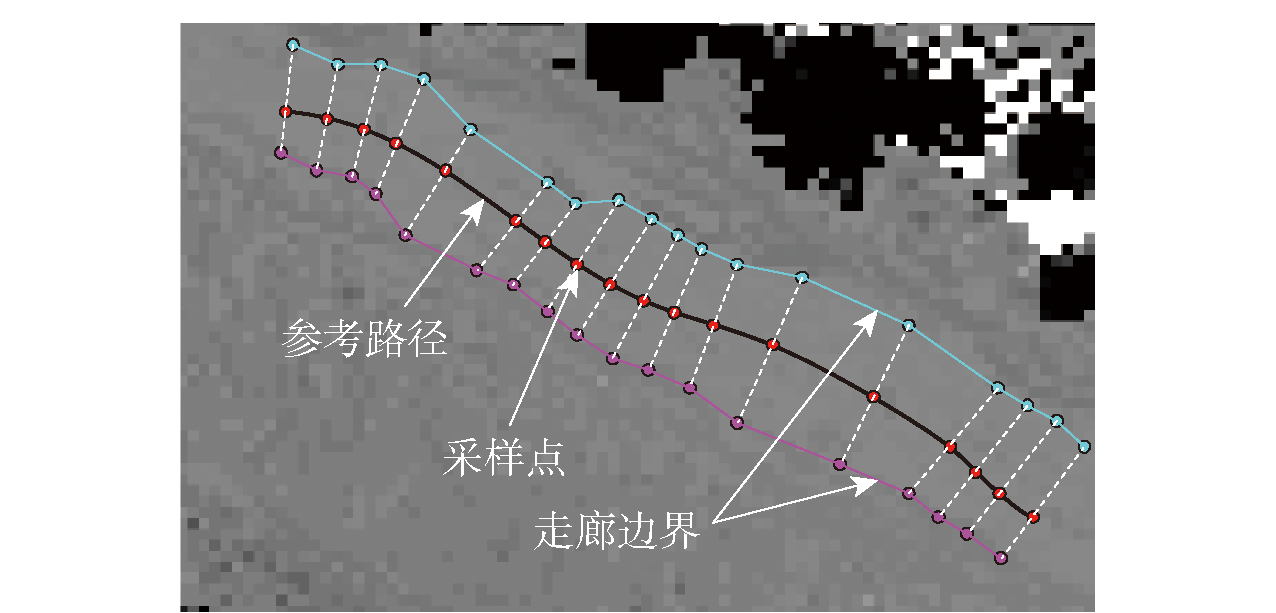
图8 可通行走廊构建
Fig.8 Construction of traversable corridor
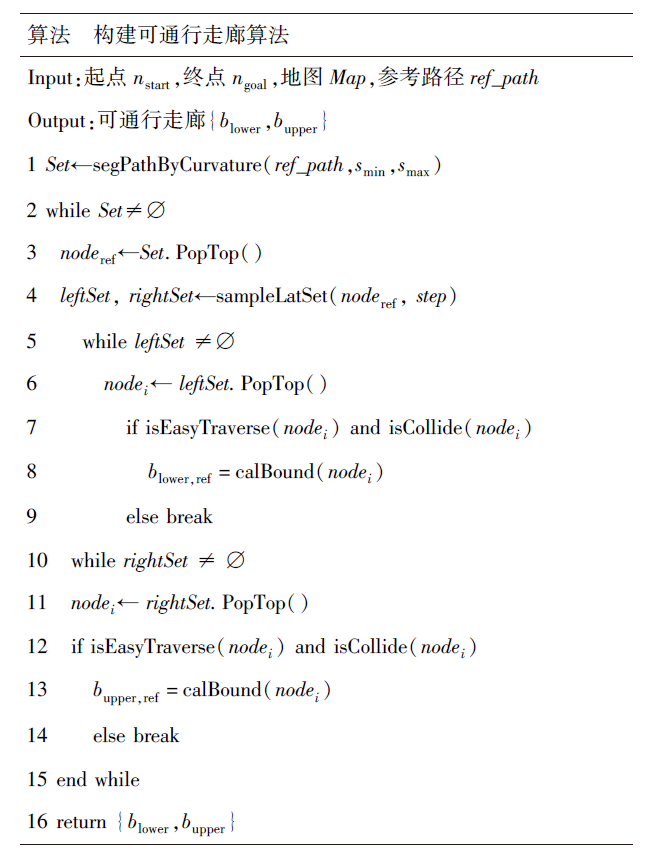
图9 可通行走廊伪代码
Fig.9 Pseudocode of traversable corridor
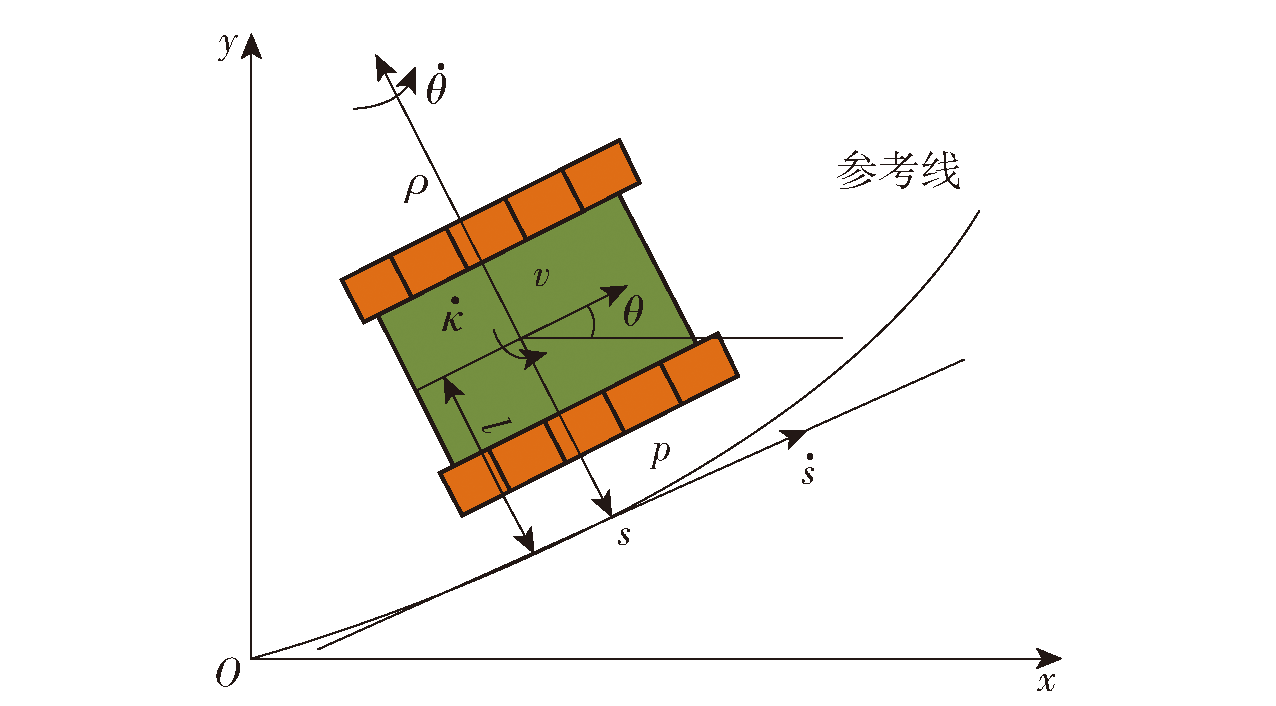
图10 Frenet坐标系下车辆运动学模型
Fig.10 Vehicle kinematic model in Frenet coordinate system

图11 试验车辆和试验场
Fig.11 Experimental vehicle and site
| 参数 | 数值 |
|---|---|
| 车辆行驶速度v/(km·h-1) | 5 |
| 节点扩展半径上界Rmax/m | 3 |
| 节点扩展半径下界Rmin/m | 1.2 |
| 无梯度迭代平滑thresh/m | 0.0001 |
| 自适应采样smin/m | 0.3 |
| 自适应采样smax/m | 5 |
| 自适应采样κm/m-1 | 0.02 |
| 自适应采样κM/m-1 | 0.2 |
| A*距离代价权重ωm | 10 |
| A*可通行度代价权重ωi | 0.1 |
| 无梯度平滑路径长度代价权重ωs | 10 |
| 无梯度平滑可通行度代价权重ωt | 0.1 |
| 横向采样步长step/m | 0.2 |
| 可通行走廊最大宽度bw/m | 4 |
| 参考线偏差代价权重ωd | 0.01 |
| 平滑性代价曲率项权重ωκ | 20 |
| 平滑性代价曲率变化率项权重ωμ | 100 |
| 终点状态横向位置允许偏差Δl/m | 0.2 |
| 终点状态航向角允许偏差Δθ/(°) | 5 |
| 曲率上界κmax | 0.2 |
| 曲率变化率上界κ'max | 0.05 |
| 可通行度检测pr | 0.5 |
表1 试验参数
Table 1 Experimental parameters
| 参数 | 数值 |
|---|---|
| 车辆行驶速度v/(km·h-1) | 5 |
| 节点扩展半径上界Rmax/m | 3 |
| 节点扩展半径下界Rmin/m | 1.2 |
| 无梯度迭代平滑thresh/m | 0.0001 |
| 自适应采样smin/m | 0.3 |
| 自适应采样smax/m | 5 |
| 自适应采样κm/m-1 | 0.02 |
| 自适应采样κM/m-1 | 0.2 |
| A*距离代价权重ωm | 10 |
| A*可通行度代价权重ωi | 0.1 |
| 无梯度平滑路径长度代价权重ωs | 10 |
| 无梯度平滑可通行度代价权重ωt | 0.1 |
| 横向采样步长step/m | 0.2 |
| 可通行走廊最大宽度bw/m | 4 |
| 参考线偏差代价权重ωd | 0.01 |
| 平滑性代价曲率项权重ωκ | 20 |
| 平滑性代价曲率变化率项权重ωμ | 100 |
| 终点状态横向位置允许偏差Δl/m | 0.2 |
| 终点状态航向角允许偏差Δθ/(°) | 5 |
| 曲率上界κmax | 0.2 |
| 曲率变化率上界κ'max | 0.05 |
| 可通行度检测pr | 0.5 |
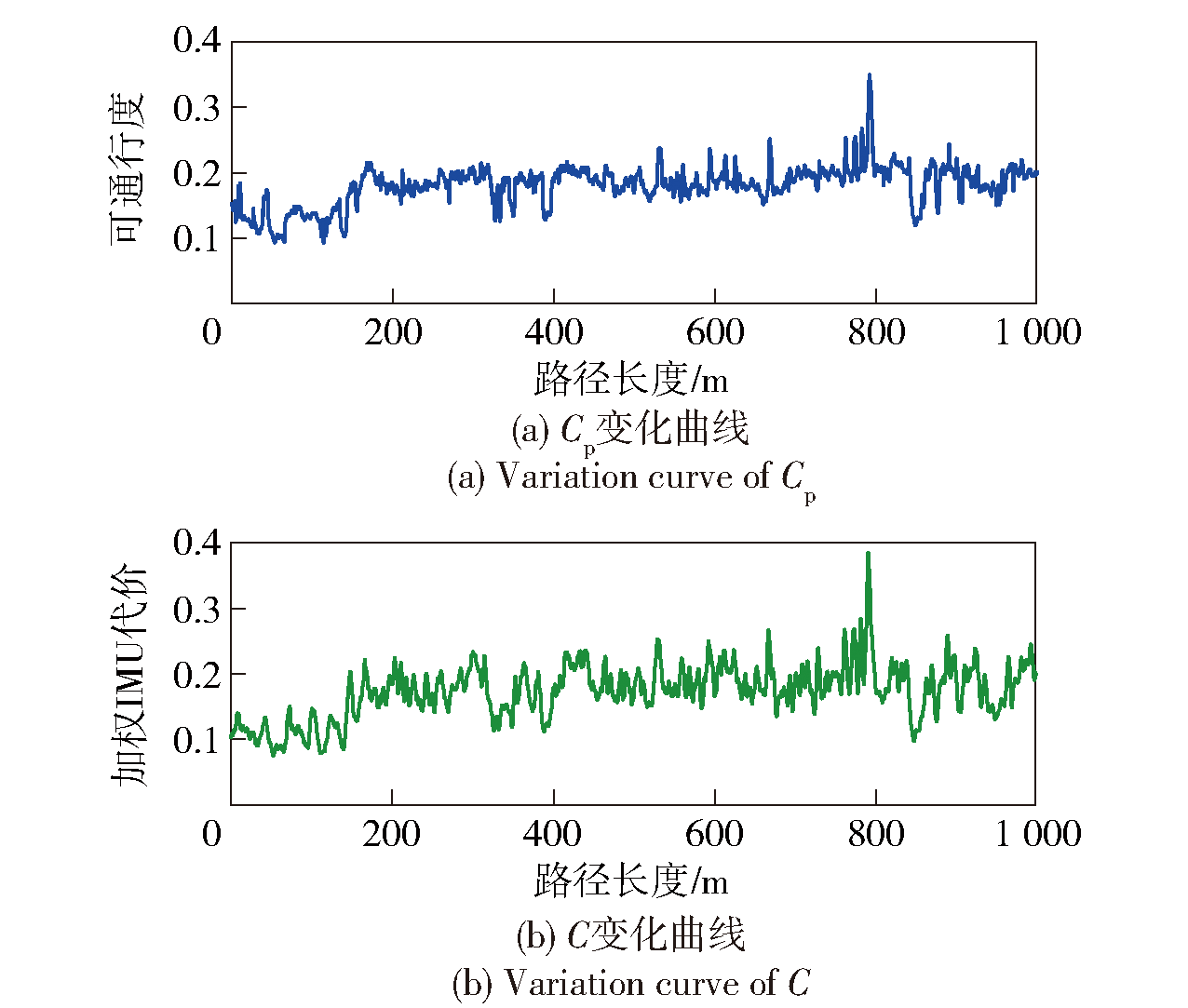
图12 Cp/C随路径长度变化趋势
Fig.12 Changes in Cp/C with s

图13 基于Cp的可通行度代价地图
Fig.13 Traversability cost map based on Cp
| MSE | MAE | RMSE | R |
|---|---|---|---|
| 0.0005 | 0.0197 | 0.0236 | 0.8450 |
表2 Cp和C统计参数
Table 2 Statistical parameters of Cp and C
| MSE | MAE | RMSE | R |
|---|---|---|---|
| 0.0005 | 0.0197 | 0.0236 | 0.8450 |

图14 基于栅格高度差的可通行度代价地图
Fig.14 Traversability cost map based on grid height difference

图15 试验场景实拍
Fig.15 Real time shots of experimental sites

图16 C1场景参考路径规划结果自对比
Fig.16 Self comparison of C1 with reference paths

图17 C1场景可通行走廊和优化结果自对比
Fig.17 Self omparison of C1 with traversable orridor and optimized results
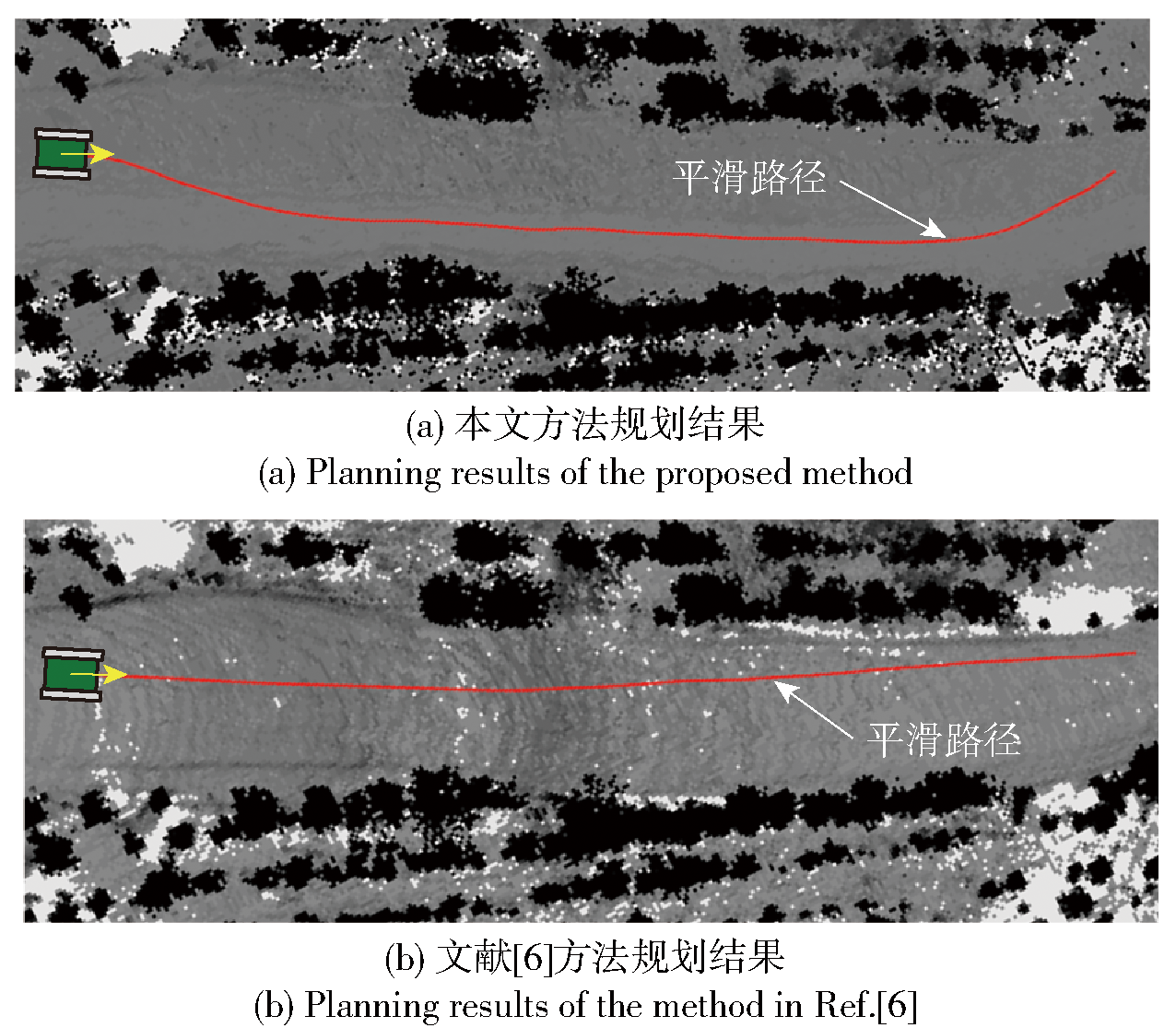
图18 C2场景规划结果对比
Fig.18 Comparison of C2 with planning results

图19 车辆俯仰角和侧倾角变化曲线(本文方法)
Fig.19 Change curves of pitch and roll angles (in this article)
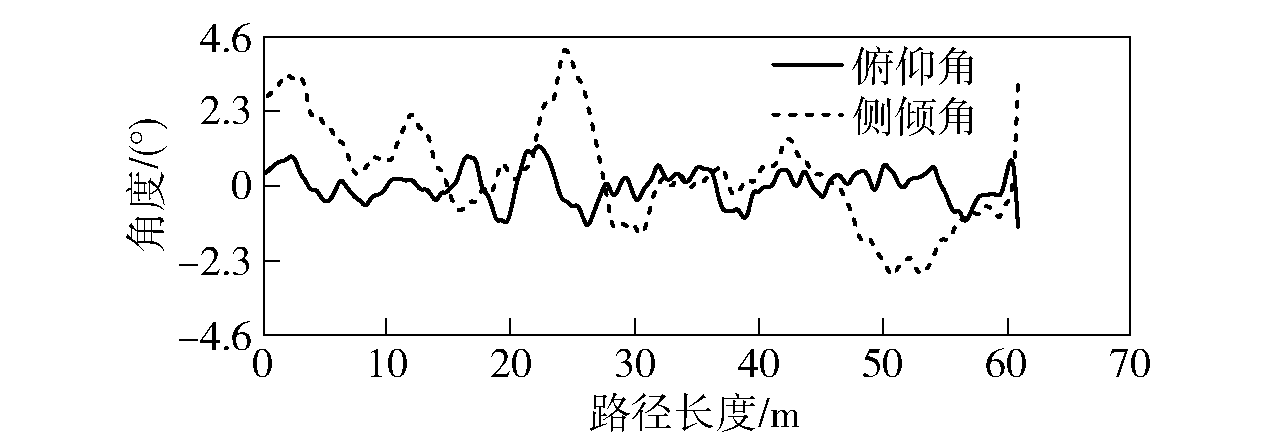
图20 车辆俯仰角和侧倾角变化曲线(文献[6]方法)
Fig.20 Change curves of pitch and roll angles (Ref.[6] method)
| 规划方法 | 时间/ ms | 平均俯仰角/ ((°)·m-1) | 平均侧倾角/ ((°)·m-1)) | 平均曲率/ m-1 |
|---|---|---|---|---|
| 本文方法 | 65 | 0.4942 | 1.0089 | 0.0332 |
| 文献[6]方法 | 105 | 2.4772 | 3.3869 | 0.0283 |
表3 场景C2规划路径指标对比
Table 3 Comparison of planned route indicators of C2
| 规划方法 | 时间/ ms | 平均俯仰角/ ((°)·m-1) | 平均侧倾角/ ((°)·m-1)) | 平均曲率/ m-1 |
|---|---|---|---|---|
| 本文方法 | 65 | 0.4942 | 1.0089 | 0.0332 |
| 文献[6]方法 | 105 | 2.4772 | 3.3869 | 0.0283 |
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10): 1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
doi: 10.1109/TITS.6979 URL |
| [3] |
doi: 10.1002/rob.v26:4 URL |
| [4] |
|
| [5] |
|
| [6] |
doi: 10.1109/LSP.2016. URL |
| [7] |
|
| [8] |
doi: 10.17531/ein URL |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
袁夏, 赵春霞. 一种激光雷达可通行区域提取算法[J]. 兵工学报, 2010, 31(12): 1702-1707.
|
|
|
|
| [13] |
doi: 10.3390/s19112577 URL |
| [14] |
黄庭鸿, 聂卓赟, 王庆国, 等. 基于区块自适应特征融合的图像实时语义分割[J]. 自动化学报, 2021, 47(5): 1137-1148.
|
|
|
|
| [15] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [16] |
彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1):1-10.
|
|
|
|
| [17] |
周孝添, 任宏斌, 苏波, 等. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405.
doi: 10.12382/bgxb.2021.0756 |
|
doi: 10.12382/bgxb.2021.0756 |
|
| [18] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [19] |
doi: 10.1016/j.ymssp.2015.10.021 URL |
| [20] |
|
| [21] |
刘龙龙, 陈慧岩, 刘海鸥, 等. 基于拓扑路网的多挡无人履带平台路径重规划[J]. 兵工学报, 2023, 44(1): 279-289.
doi: 10.12382/bgxb.2021.0827 |
|
doi: 10.12382/bgxb.2021.0827 |
|
| [22] |
王博洋, 关海杰, 龚建伟, 等. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2): 241-251.
|
|
doi: 10.3969/j.issn.1000-1093.2022.02.001 |
|
| [23] |
田洪清, 王建强, 黄荷叶, 等. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
doi: 10.1007/s12532-020-00179-2 |
| [1] | 潘作栋,周悦,郭威,徐高飞,孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [2] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [3] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [4] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| [5] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [6] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [7] | 胡致远, 王征, 杨洋, 尹洋. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684. |
| [8] | 郭威, 吴凯, 周悦, 孙洪鸣, 徐高飞, 高森. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6): 1387-1394. |
| [9] | 张韬, 项祺, 郑婉文, 孙宇祥, 周献中. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968. |
| [10] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [11] | 赵鹏程, 宋保维, 毛昭勇, 丁文俊. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608. |
| [12] | 田洪清, 王建强, 黄荷叶, 丁峰. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505. |
| [13] | 邓海鹏, 麻斌, 赵海光, 吕良, 刘宇. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| [14] | 孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10): 2106-2121. |
| [15] | 赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4): 680-688. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4