
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (1): 27-39.doi: 10.12382/bgxb.2022.0266
所属专题: 特种车辆理论与技术
张发平1,*( ), 张书畅1, 武锴2, 张云贺1, 阎艳1
), 张书畅1, 武锴2, 张云贺1, 阎艳1
收稿日期:2022-04-15
上线日期:2022-09-06
通讯作者:
ZHANG Faping1,*(), ZHANG Shuchang1, WU Kai2, ZHANG Yunhe1, YAN Yan1
Received:2022-04-15
Online:2022-09-06
摘要:
为解决履带车辆动力学优化过程因代理模型构建和应用的不足而导致的参数寻优精度和效率不高的问题,提出基于代理模型进化的参数优化方法,将优化迭代和代理模型动态构建相融合,来降低仿真模型调用次数和提高优化效率。根据车辆几何拓扑结构,构建考虑履带包络效应的车辆多体动力学模型;提出优化设计变量空间的3层子空间划分方法,以及具有空间聚焦、空间约简和跳出局部寻优的多级模糊聚类空间约简方法,实现设计参数在3层子空间的高效缩减。以履带车辆多体动力学模型参数优化过程为例进行应用验证。研究结果表明:在3种路况下的履带车辆多体动力学优化过程降低仿真模型调用次数最高可达85%;表征履带车辆行进特性的综合性能指标分别提升约32.4%、24.5%、20.4%。证明了新方法可有效提高动力学模型的优化效率和精度。
中图分类号:
张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39.
ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution[J]. Acta Armamentarii, 2023, 44(1): 27-39.
| 序号 | 名称 | 数量 | 序号 | 名称 | 数量 |
|---|---|---|---|---|---|
| 1 | 车体 | 1 | 11 | 限位器 | 8 |
| 2 | 滑柱 | 2 | 12 | 扭杆弹簧 | 12 |
| 3 | 套筒 | 2 | 13 | 平衡肘 | 12 |
| 4 | 曲臂 | 2 | 14 | 炮塔 | 1 |
| 5 | 诱导轮 | 2 | 15 | 摇架 | 1 |
| 6 | 托带轮 | 6 | 16 | 前衬瓦 | 1 |
| 7 | 主动轮 | 2 | 17 | 后衬瓦 | 1 |
| 8 | 负重轮 | 12 | 18 | 身管 | 1 |
| 9 | 履带销 | 368 | 19 | 炮尾 | 1 |
| 10 | 履带板 | 184 |
表1 坦克多体动力学模型部件明细
Table 1 Details of tank multi-body dynamics model cemponents
| 序号 | 名称 | 数量 | 序号 | 名称 | 数量 |
|---|---|---|---|---|---|
| 1 | 车体 | 1 | 11 | 限位器 | 8 |
| 2 | 滑柱 | 2 | 12 | 扭杆弹簧 | 12 |
| 3 | 套筒 | 2 | 13 | 平衡肘 | 12 |
| 4 | 曲臂 | 2 | 14 | 炮塔 | 1 |
| 5 | 诱导轮 | 2 | 15 | 摇架 | 1 |
| 6 | 托带轮 | 6 | 16 | 前衬瓦 | 1 |
| 7 | 主动轮 | 2 | 17 | 后衬瓦 | 1 |
| 8 | 负重轮 | 12 | 18 | 身管 | 1 |
| 9 | 履带销 | 368 | 19 | 炮尾 | 1 |
| 10 | 履带板 | 184 |
| 编号 | 名称 | 数量 | 编号 | 名称 | 数量 |
|---|---|---|---|---|---|
| J1 | 固定铰 | 8 | J15 | 旋转副 | 2 |
| J2 | 间隙碰撞 | 8 | J16 | 接触力 | 2 |
| J3 | 固定铰 | 12 | J17 | 旋转副 | 2 |
| J4 | 弹簧阻尼 | 12 | J18 | 接触力 | 6 |
| J5 | 驱动力矩 | 2 | J19 | 轴套力 | 368 |
| J6 | 旋转副 | 2 | J20 | 接触摩擦 | 184 |
| J7 | 旋转副 | 12 | J21 | 弹簧阻尼 | 4 |
| J8 | 接触力 | 2 | J22 | 接触力 | 2 |
| J9 | 接触力 | 12 | J23 | 固定铰 | 2 |
| J10 | 球副 | 2 | J24 | 固定铰 | 2 |
| J11 | 移动副 | 2 | J25 | 间隙碰撞 | 2 |
| J12 | 弹簧阻尼 | 2 | J26 | 间隙碰撞 | 2 |
| J13 | 圆柱副 | 2 | J27 | 固定铰 | 2 |
| J14 | 旋转副 | 2 |
表2 坦克多体动力学模型约束明细
Table 2 Constraint details of tank multi-body dynamics model
| 编号 | 名称 | 数量 | 编号 | 名称 | 数量 |
|---|---|---|---|---|---|
| J1 | 固定铰 | 8 | J15 | 旋转副 | 2 |
| J2 | 间隙碰撞 | 8 | J16 | 接触力 | 2 |
| J3 | 固定铰 | 12 | J17 | 旋转副 | 2 |
| J4 | 弹簧阻尼 | 12 | J18 | 接触力 | 6 |
| J5 | 驱动力矩 | 2 | J19 | 轴套力 | 368 |
| J6 | 旋转副 | 2 | J20 | 接触摩擦 | 184 |
| J7 | 旋转副 | 12 | J21 | 弹簧阻尼 | 4 |
| J8 | 接触力 | 2 | J22 | 接触力 | 2 |
| J9 | 接触力 | 12 | J23 | 固定铰 | 2 |
| J10 | 球副 | 2 | J24 | 固定铰 | 2 |
| J11 | 移动副 | 2 | J25 | 间隙碰撞 | 2 |
| J12 | 弹簧阻尼 | 2 | J26 | 间隙碰撞 | 2 |
| J13 | 圆柱副 | 2 | J27 | 固定铰 | 2 |
| J14 | 旋转副 | 2 |
图1 坦克多体动力学模型拓扑结构图
Fig.1 Topological structure of the multi-body dynamics model

图2 D、F、H级路面左右相干三维不平度模型
Fig.2 Left-right coherent three-dimensional roughness model of class D, F and H pavements

图3 坦克整车多体动力学RecurDyn模型
Fig.3 Tank multi-body dynamics RecurDyn model
图4 优化变量位置示意图
Fig.4 Schematic diagram of optimized variable location
图5 坦克参数优化过程的框架结构
Fig.5 Schematic diagram of tank parameter optimization process
图6 D级路面初始代理模型
Fig.6 Initial surrogate model of grade D pavement

图7 某次迭代过程中三层子空间示意图
Fig.7 Schematic diagram of three-layer subspaces in an iterative process
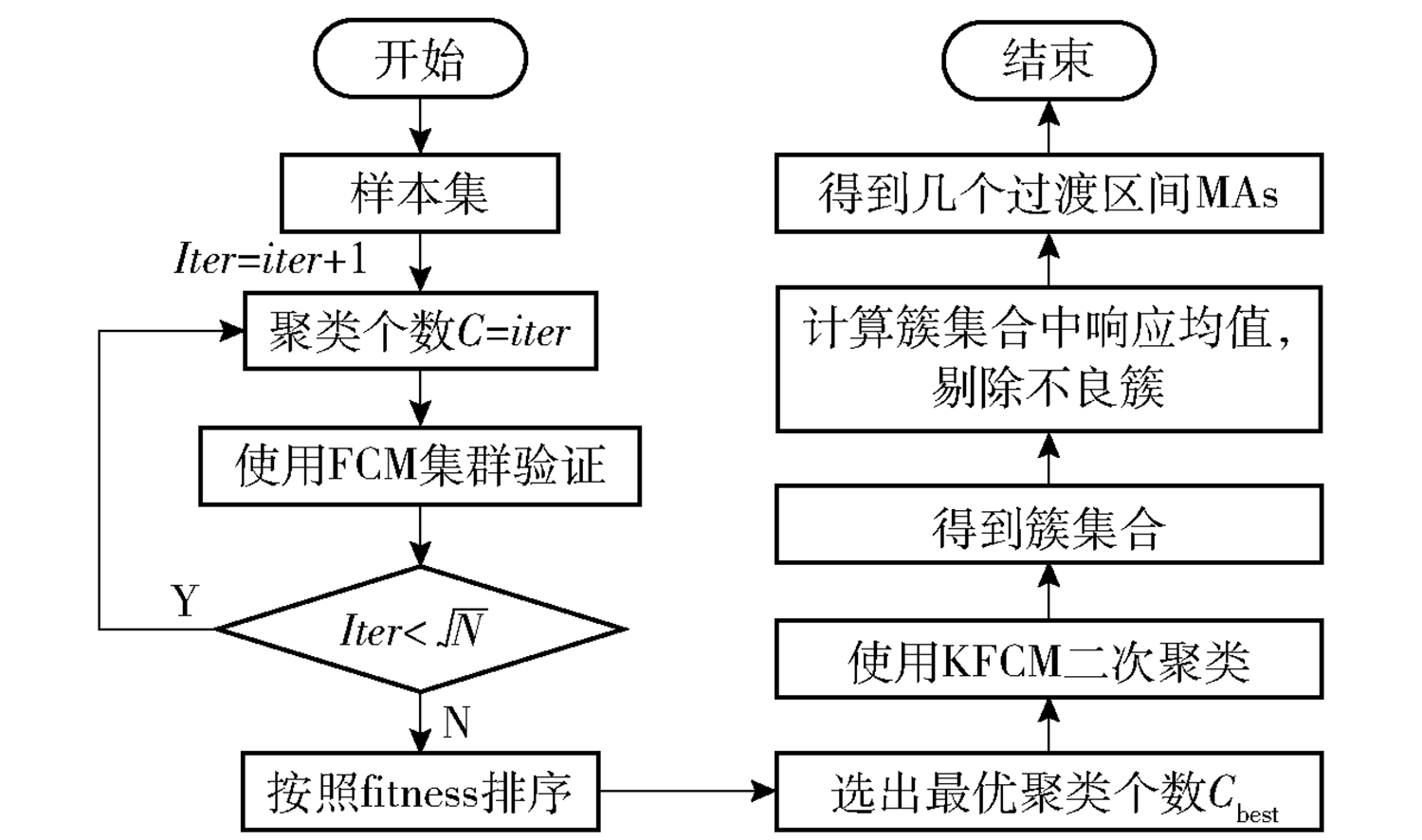
图8 基于二次聚类确定过渡区间流程图
Fig.8 Flow chart of determining transition intervals based on quadratic clustering
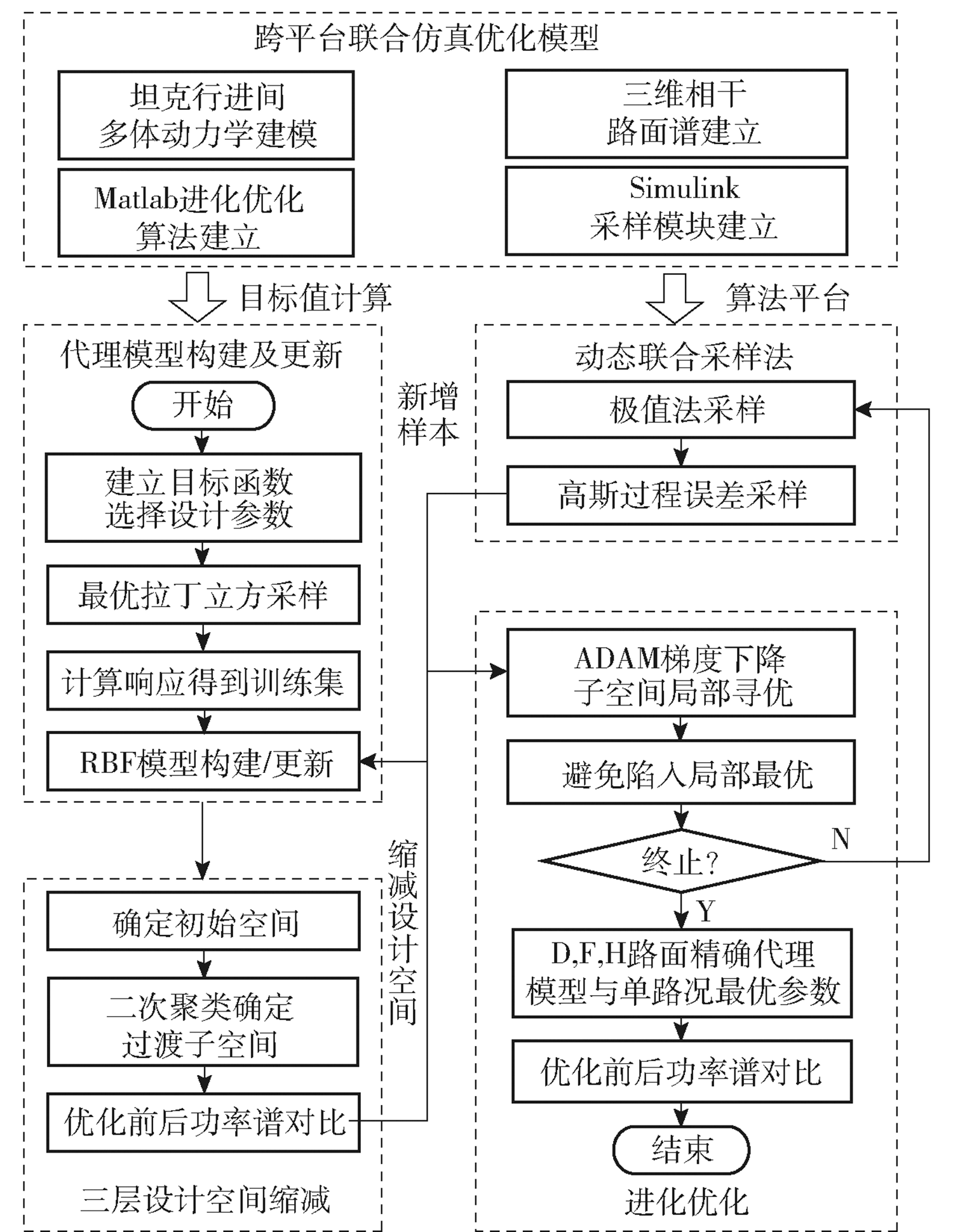
图9 坦克参数优化总体技术流程
Fig.9 Overall technical process of tank parameter optimization
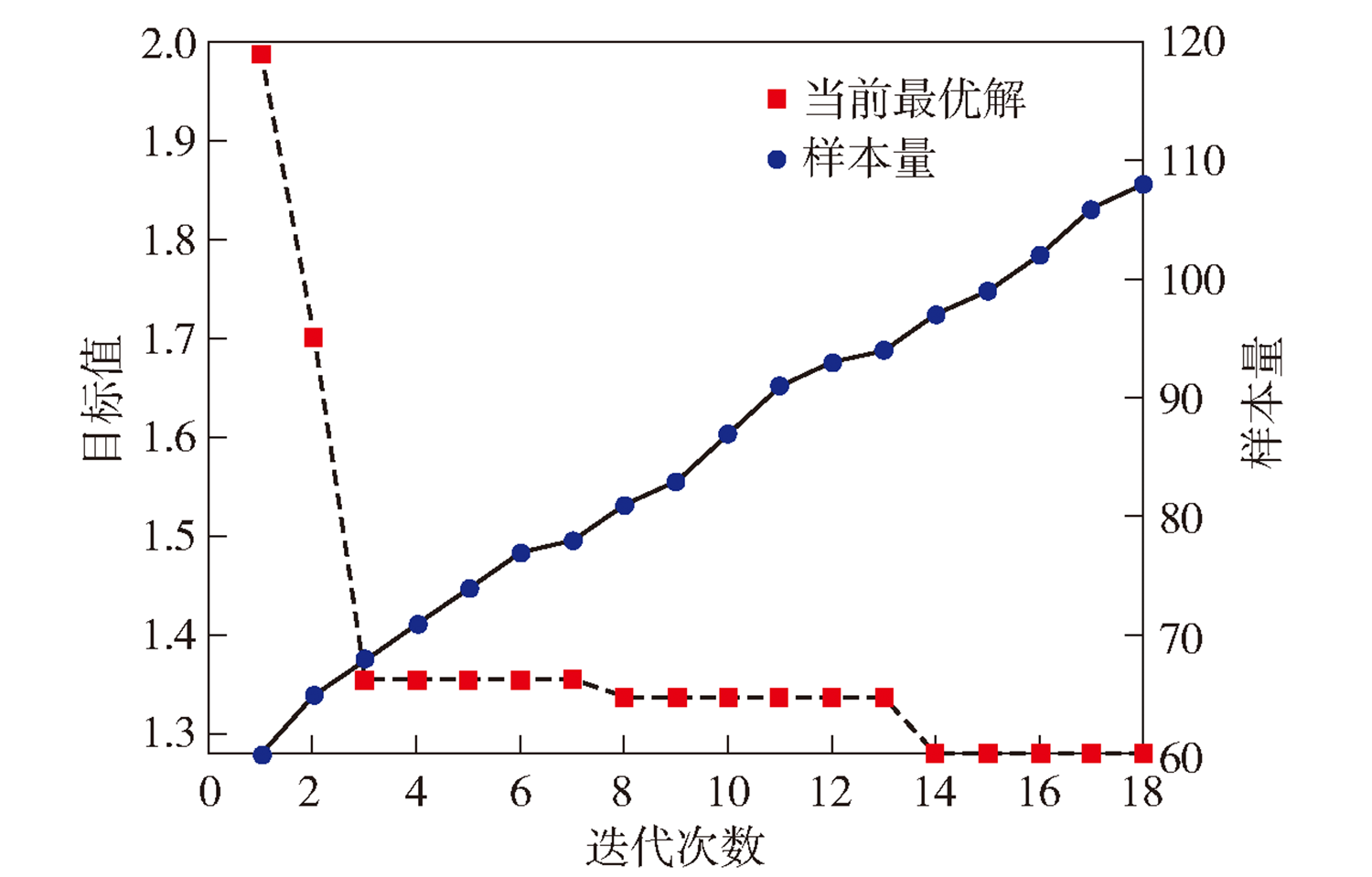
图10 D级路面谱优化收敛曲线
Fig.10 Convergence curve of spectrum optimization of grade D pavement
| 算法参数 | 仿真参数 | ||||||
|---|---|---|---|---|---|---|---|
| 最大迭代次数 | 最大样本数量 | 初始样本数量 | ADAM前进步长 | ADAM前进次数 | 仿真时间/s | 仿真步长/ms | 行驶速度/(km·h-1) |
| 50 | 200 | 60 | 0.2 | 200 | 30 | 1 | 0~35 |
表1 优化过程中算法及仿真模型参数设置
Table 1 Algorithm and simulation model parameter setting
| 算法参数 | 仿真参数 | ||||||
|---|---|---|---|---|---|---|---|
| 最大迭代次数 | 最大样本数量 | 初始样本数量 | ADAM前进步长 | ADAM前进次数 | 仿真时间/s | 仿真步长/ms | 行驶速度/(km·h-1) |
| 50 | 200 | 60 | 0.2 | 200 | 30 | 1 | 0~35 |
| 试验 序号 | D级路面 | F级路面 | H级路面 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 初始值 | 优化值 | 变化率/% | 样本量 | 初始值 | 优化值 | 变化率/% | 样本量 | 初始值 | 优化值 | 变化率/% | 样本量 | |
| 1 | 1.9702 | 1.2846 | 34.8 | 108 | 3.5912 | 2.6439 | 26.6 | 96 | 6.7523 | 5.3154 | 21.3 | 97 |
| 2 | 1.3141 | 33.3 | 107 | 2.7344 | 24.0 | 103 | 5.3352 | 21.0 | 105 | |||
| 3 | 1.2986 | 34.1 | 93 | 2.7228 | 24.4 | 92 | 5.4238 | 19.6 | 108 | |||
| 4 | 1.3307 | 32.5 | 103 | 2.7534 | 23.5 | 96 | 5.3320 | 21.0 | 104 | |||
| 5 | 1.3530 | 31.3 | 96 | 2.7500 | 23.6 | 91 | 5.3330 | 21.0 | 95 | |||
| 6 | 1.2999 | 34.0 | 102 | 2.7611 | 23.3 | 102 | 5.4115 | 19.8 | 109 | |||
| 7 | 1.4339 | 27.2 | 91 | 2.6871 | 25.4 | 98 | 5.3647 | 20.5 | 101 | |||
| 8 | 1.3344 | 32.3 | 108 | 2.7478 | 23.7 | 110 | 5.4135 | 19.8 | 98 | |||
| 9 | 1.3292 | 32.5 | 95 | 2.7274 | 24.2 | 95 | 5.4278 | 19.6 | 99 | |||
| 10 | 1.2939 | 34.3 | 101 | 2.7034 | 24.9 | 104 | 5.4029 | 20.0 | 93 | |||
表2 基于代理模型进化优化算法的10次单路面优化(悬挂系统参数优化目标函数值)
Table 2 10 times single road optimization based on agent model evolutionary optimization algorithm (objective function value of suspension parameter optimization)
| 试验 序号 | D级路面 | F级路面 | H级路面 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 初始值 | 优化值 | 变化率/% | 样本量 | 初始值 | 优化值 | 变化率/% | 样本量 | 初始值 | 优化值 | 变化率/% | 样本量 | |
| 1 | 1.9702 | 1.2846 | 34.8 | 108 | 3.5912 | 2.6439 | 26.6 | 96 | 6.7523 | 5.3154 | 21.3 | 97 |
| 2 | 1.3141 | 33.3 | 107 | 2.7344 | 24.0 | 103 | 5.3352 | 21.0 | 105 | |||
| 3 | 1.2986 | 34.1 | 93 | 2.7228 | 24.4 | 92 | 5.4238 | 19.6 | 108 | |||
| 4 | 1.3307 | 32.5 | 103 | 2.7534 | 23.5 | 96 | 5.3320 | 21.0 | 104 | |||
| 5 | 1.3530 | 31.3 | 96 | 2.7500 | 23.6 | 91 | 5.3330 | 21.0 | 95 | |||
| 6 | 1.2999 | 34.0 | 102 | 2.7611 | 23.3 | 102 | 5.4115 | 19.8 | 109 | |||
| 7 | 1.4339 | 27.2 | 91 | 2.6871 | 25.4 | 98 | 5.3647 | 20.5 | 101 | |||
| 8 | 1.3344 | 32.3 | 108 | 2.7478 | 23.7 | 110 | 5.4135 | 19.8 | 98 | |||
| 9 | 1.3292 | 32.5 | 95 | 2.7274 | 24.2 | 95 | 5.4278 | 19.6 | 99 | |||
| 10 | 1.2939 | 34.3 | 101 | 2.7034 | 24.9 | 104 | 5.4029 | 20.0 | 93 | |||
| 路面 | /(N·m-1) | /(N·m-1) | /(N·m-1) | /(N·(m·s-1)-1) | /(N·(m·s-1)-1) | /(N·(m·s-1)-1) |
|---|---|---|---|---|---|---|
| 初始值 | 1.000×106 | 1.000×106 | 1.000×106 | 1.000×104 | 1.000×104 | 1.000×104 |
| D级 | 5.413×106 | 5.017×106 | 5.830×106 | 4.262×104 | 4.353×104 | 5.882×104 |
| F级 | 6.473×106 | 6.417×106 | 1.757×107 | 1.088×105 | 1.854×105 | 6.869×104 |
| H级 | 1.175×107 | 1.582×107 | 1.365×107 | 9.846×104 | 1.338×105 | 1.460×105 |
表3 3种路面下的最优参数组合
Table 3 Optimal parameter combination for each grade of pavement
| 路面 | /(N·m-1) | /(N·m-1) | /(N·m-1) | /(N·(m·s-1)-1) | /(N·(m·s-1)-1) | /(N·(m·s-1)-1) |
|---|---|---|---|---|---|---|
| 初始值 | 1.000×106 | 1.000×106 | 1.000×106 | 1.000×104 | 1.000×104 | 1.000×104 |
| D级 | 5.413×106 | 5.017×106 | 5.830×106 | 4.262×104 | 4.353×104 | 5.882×104 |
| F级 | 6.473×106 | 6.417×106 | 1.757×107 | 1.088×105 | 1.854×105 | 6.869×104 |
| H级 | 1.175×107 | 1.582×107 | 1.365×107 | 9.846×104 | 1.338×105 | 1.460×105 |
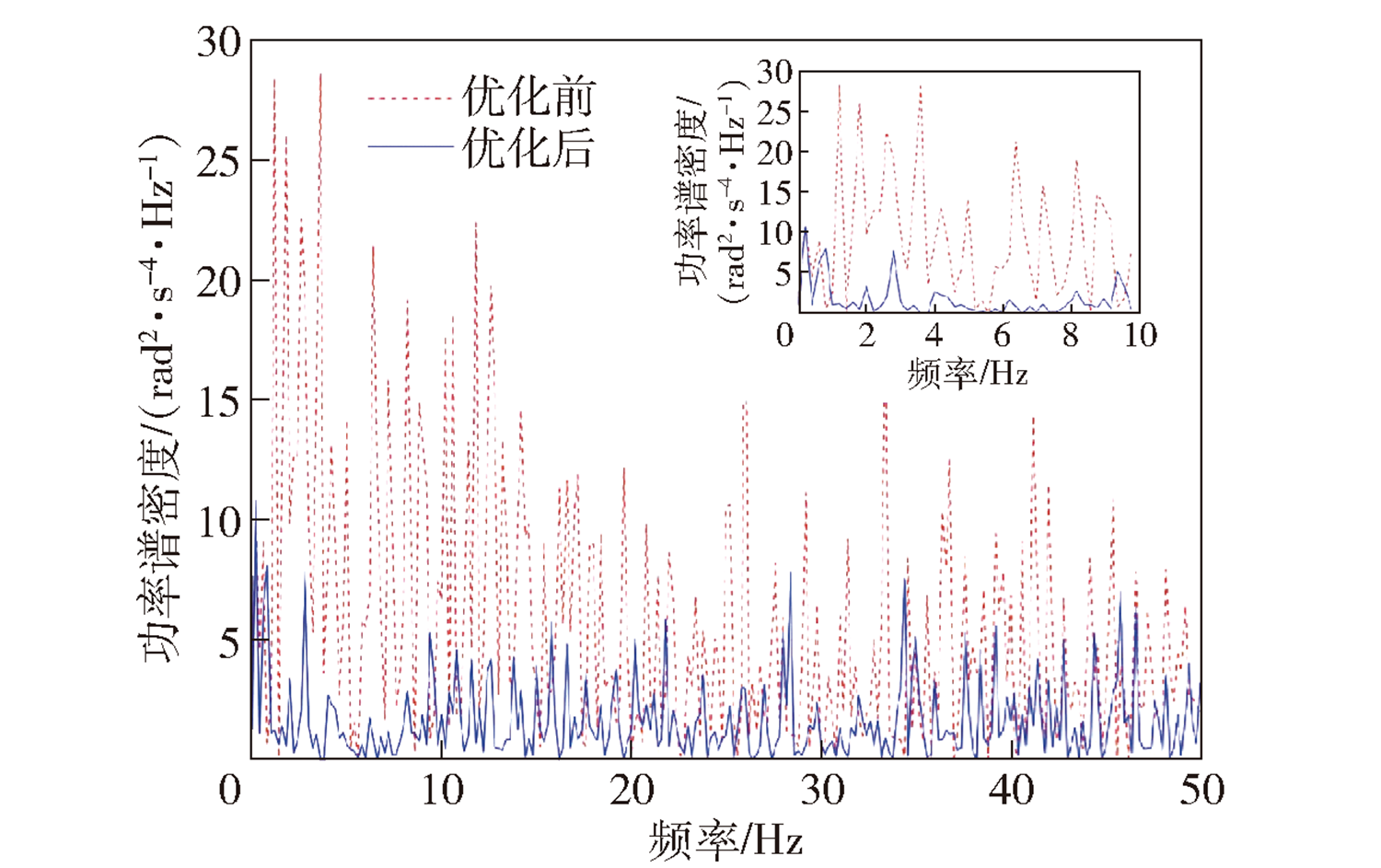
图11 H级路面下优化前后功率谱密度对比
Fig.11 Comparison of power spectral densities before and after optimization for H grades of pavement
| [1] |
毛明, 张亚峰, 杜甫, 等. 高机动履带车辆行驶系统中的5个科学技术问题[J]. 兵工学报, 2015, 36(8):172-181.
|
|
|
|
| [2] |
刘飞飞, 芮筱亭, 于龙海, 等. 考虑身管柔性的坦克行进间发射动力学研究[J]. 振动与冲击, 2016, 35(2): 58-63.
|
|
|
|
| [3] |
汪国胜, 药凌宇, 魏来生, 等. 某型坦克底盘线振动对行进间射击精度影响机理研究[J]. 兵工学报, 2016, 37(3):160-165.
|
|
|
|
| [4] |
韩宝坤, 李晓雷, 孙逢春. 履带车辆动力学仿真技术的发展与展望[J]. 兵工学报, 2003, 4(2):246-249.
|
|
|
|
| [5] |
戎保, 芮筱亭, 王国平, 等. 多体系统动力学研究进展[J]. 振动与冲击, 2011, 30(7):178-187.
|
|
|
|
| [6] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7):1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [7] |
王钦龙, 王红岩, 芮强. 基于多目标遗传算法的高速履带车辆动力学模型参数修正研究[J]. 兵工学报, 2016, 37(6):969-978.
doi: 10.3969/j.issn.1000-1093.2016.06.002 |
|
|
|
| [8] |
王钦龙, 王红岩, 芮强. 基于近似模型和模式搜索法的履带车辆多体动力学模型参数修正研究[J]. 科学技术与工程, 2016, 16(33): 46-53.
|
|
|
|
| [9] |
张扬, 张维刚, 马桃, 等. 基于全局敏感性分析和动态代理模型的复杂非线性系统优化设计方法[J]. 机械工程学报, 2015, 51(4): 126-131.
doi: 10.3901/JME.2015.04.126 |
|
doi: 10.3901/JME.2015.04.126 |
|
| [10] |
doi: 10.1177/0954409715605126 URL |
| [11] |
张剑. 基于代理模型技术的高速列车性能参数设计及优化[D]. 成都: 西南交通大学, 2015.
|
|
|
|
| [12] |
doi: 10.1080/00423114.2016.1150497 URL |
| [13] |
doi: 10.1023/A:1012771025575 URL |
| [14] |
doi: 10.1023/A:1008306431147 URL |
| [15] |
doi: 10.1007/s10898-012-9892-5 URL |
| [16] |
doi: 10.1007/BF01197433 URL |
| [17] |
|
| [18] |
doi: 10.1080/03052150108940940 URL |
| [19] |
马伟标, 王红岩, 王良曦, 等. 基于径向基函数响应面的履带车辆悬挂系统参数优化方法[J]. 兵工学报, 2011, 32(9):1053-1058.
|
|
|
|
| [20] |
卞美卉, 张洋, 杜志岐. 履带车辆履带预张紧力对平顺性的影响与仿真[J]. 车辆与动力技术, 2019(1):34-37.
|
|
|
|
| [21] |
任宏斌, 陈思忠, 吴志成, 等. 车辆左右车轮路面不平度的时域再现研究[J]. 北京理工大学学报, 2013, 33(3):257-306.
|
|
|
|
| [22] |
刘朋科, 周柏承, 李娜. 基于Kriging模型的行进间坦克结构参数不确定性分析及炮口响应优化[J]. 机械工程师, 2021(9):87-92.
|
|
|
|
| [23] |
陈宇, 杨国来, 谢润, 等. 某坦克行进间射击炮口振动优化与分析[J]. 弹道学报, 2016, 28(4):86-89.
|
|
|
|
| [24] |
|
| [25] |
张永志, 董俊慧. 基于模糊C均值聚类的模糊RBF神经网络预测焊接接头力学性能建模[J]. 机械工程学报, 2014, 50(12):58-64.
|
|
|
|
| [26] |
张袅娜, 丁海涛, 于海芳, 等. 基于核主元约简与半监督核模糊聚类的车辆行驶工况判别[J]. 机械工程学报, 2015, 51(2):96-102.
doi: 10.3901/JME.2015.02.096 |
|
doi: 10.3901/JME.2015.02.096 |
|
| [27] |
|
| [28] |
|
| [1] | 袁艺,盖江涛,曾根,周广明,李训明,马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107. |
| [2] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [3] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [4] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| [5] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [6] | 曾子豪, 张京东, 龚雪莲, 刘坤明, 桂学文, 廖日东. 拉伸载荷下双销式履带板强度计算方法[J]. 兵工学报, 2023, 44(3): 831-840. |
| [7] | 赵猛, 戴开达, 向召, 姜涛, 赵晓松, 徐豫新. 近爆荷载下聚氯乙烯泡沫夹芯板的动力学模型研究[J]. 兵工学报, 2023, 44(12): 3884-3896. |
| [8] | 生辉, 项昌乐, 盖江涛, 袁艺, 简洪超, 张楠. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44(11): 3498-3507. |
| [9] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [10] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [11] | 袁艺, 盖江涛, 周广明, 高秀才, 李训明, 马长军. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213. |
| [12] | 帅志斌, 贺帅, 李国辉, 李耀恒, 李勇, 张颖, 简洪超. 特种履带车辆机电复合传动装置低温启动过程建模与优化控制[J]. 兵工学报, 2023, 44(1): 117-128. |
| [13] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [14] | 张伟, 刘辉, 韩立金, 刘宝帅, 张勋, 张万年. 混合动力履带车辆机电联合制动控制[J]. 兵工学报, 2022, 43(5): 969-981. |
| [15] | 王博洋, 关海杰, 龚建伟, 陈慧岩, 赵卉菁. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2): 241-251. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4