
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3498-3507.doi: 10.12382/bgxb.2022.0850
所属专题: 群体协同与自主技术
生辉1,2,*( ), 项昌乐1, 盖江涛2, 袁艺2, 简洪超2, 张楠2
), 项昌乐1, 盖江涛2, 袁艺2, 简洪超2, 张楠2
收稿日期:2022-09-20
上线日期:2023-02-16
通讯作者:
SHENG Hui1,2,*(), XIANG Changle1, GAI Jiangtao2, YUAN Yi2, JIAN Hongchao2, ZHANG Nan2
Received:2022-09-20
Online:2023-02-16
摘要:
双侧电机耦合驱动履带车辆单侧电机发生故障如果不及时采取措施,极易导致车辆偏驶,甚至出现安全问题。为了保证单侧电机故障模式下的车辆安全,开展单侧电机故障模式下车辆制动避障安全控制研究。基于实车采取的一侧发生故障、另一侧及时处于故障模式的控制方式进行车辆安全性分析,提出一种双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制策略并通过RT-LAB半实物实时仿真验证。研究结果表明:该控制策略能够按照驾驶员意图,在单侧电机故障模式下实现不同车速下车辆不同相对转向半径的转向控制,而且面对连续的避障需求,可以稳定转向,保证履带车辆的安全。
中图分类号:
生辉, 项昌乐, 盖江涛, 袁艺, 简洪超, 张楠. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44(11): 3498-3507.
SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor[J]. Acta Armamentarii, 2023, 44(11): 3498-3507.
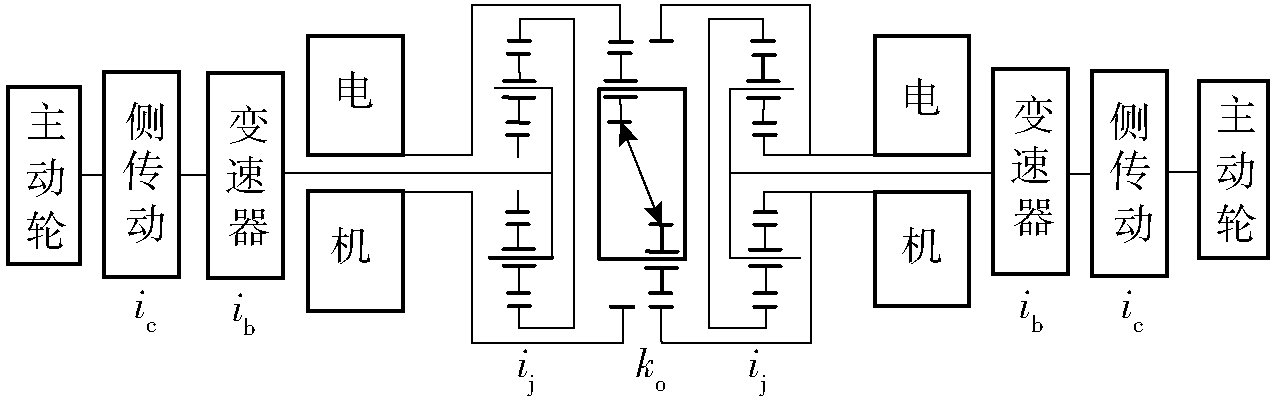
图1 双侧电机耦合驱动系统结构原理框图
Fig.1 Schematic diagram of structure of two-sided motor coupling drive system

图2 所用时间统计
Fig.2 Statistics of time used

图3 仿真模型
Fig.3 Simulation model
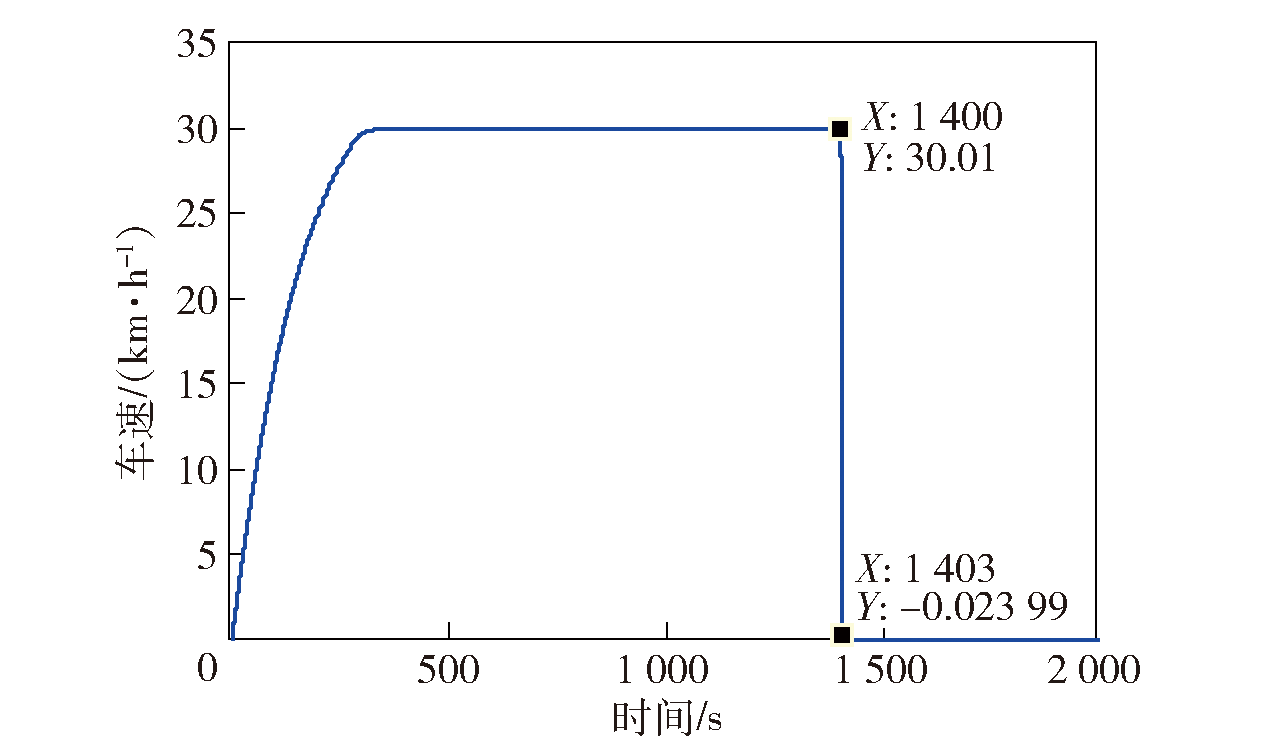
图4 30km/h车速曲线
Fig.4 Speed curve of 30km/h
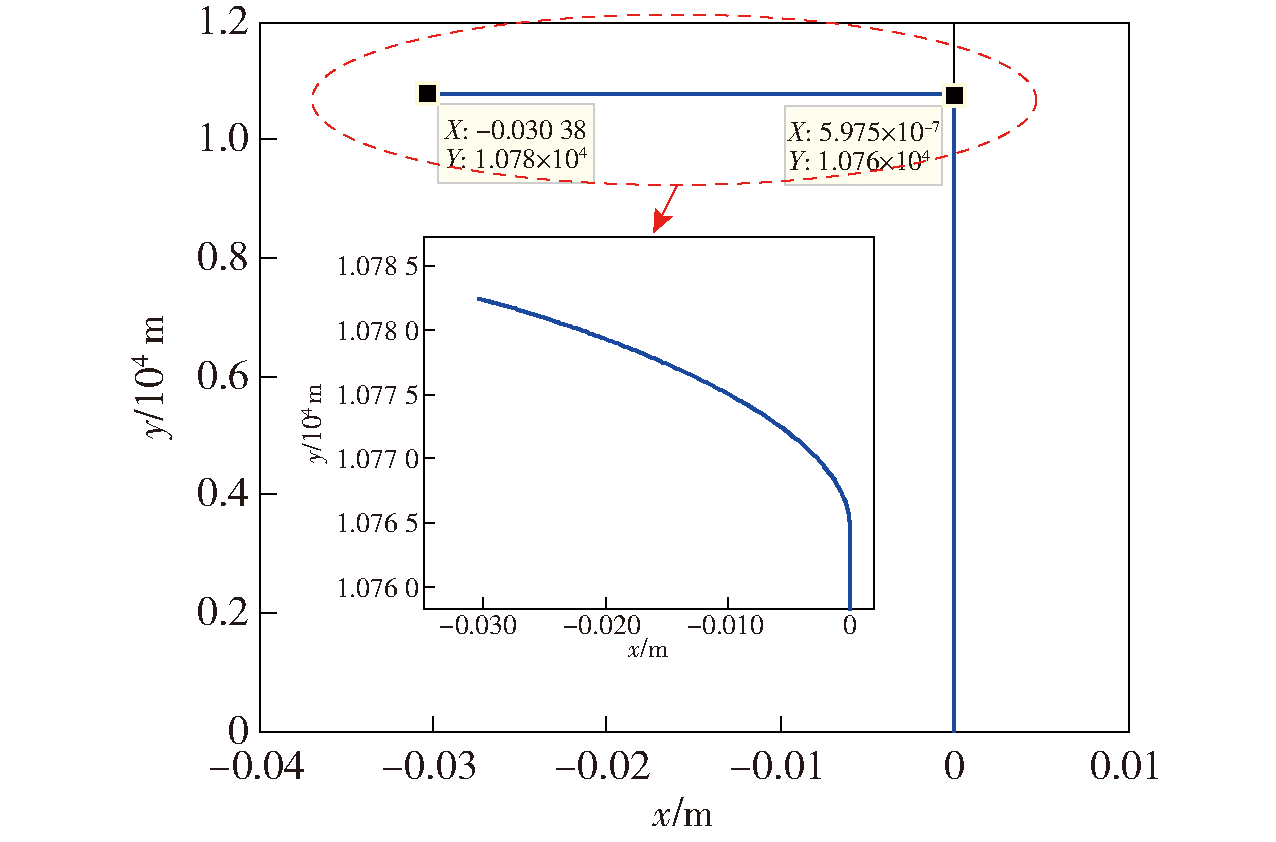
图5 30km/h车辆运行轨迹曲线
Fig.5 Running track curve of vehicle at 30km/h
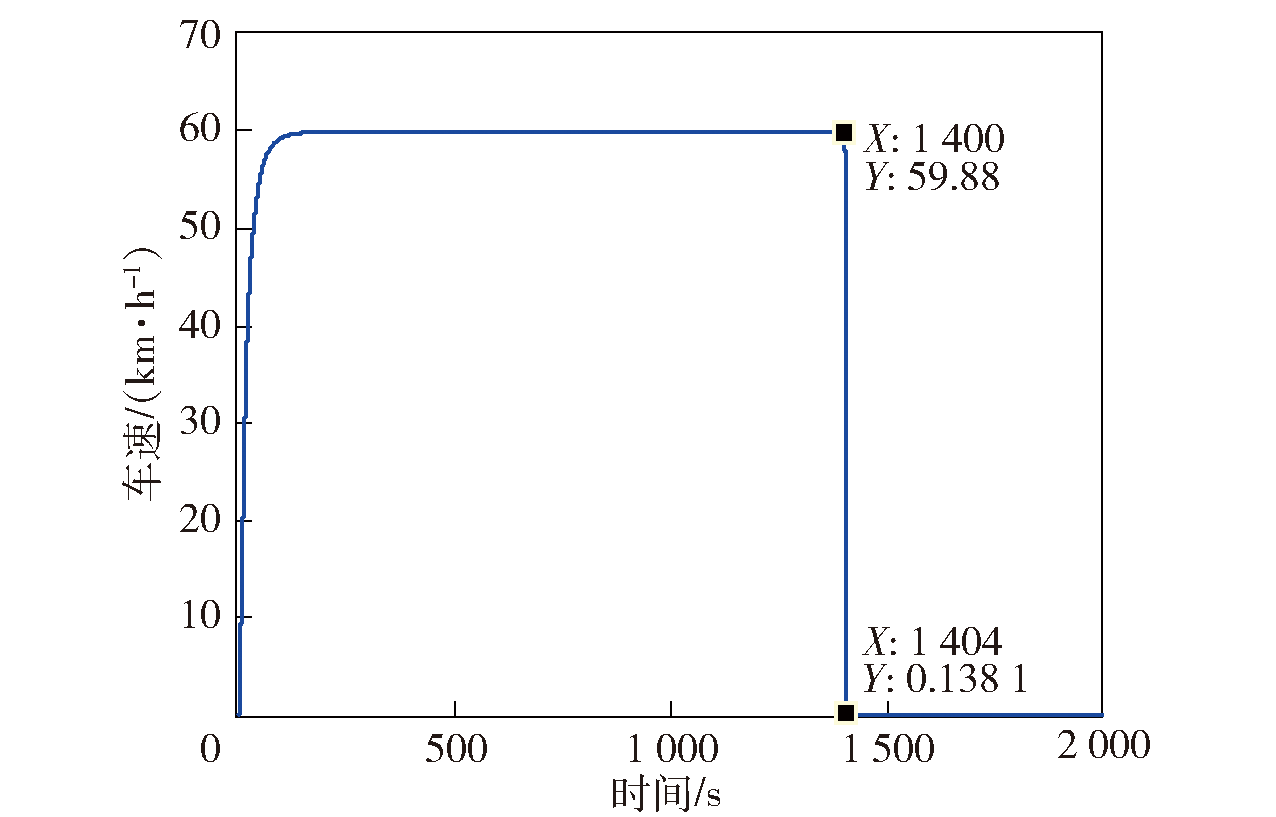
图6 60km/h车速曲线
Fig.6 Speed curve of 60km/h
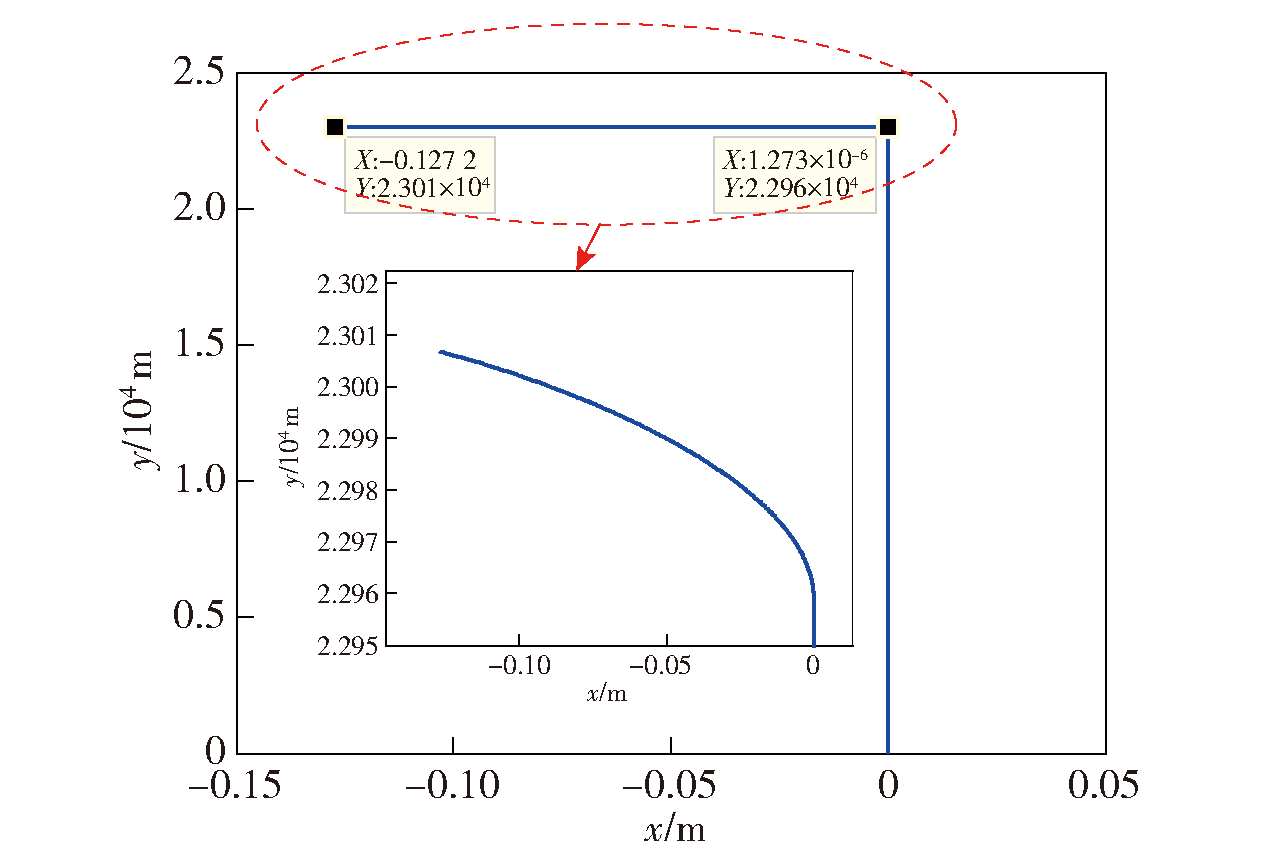
图7 60km/h车辆运行轨迹曲线
Fig.7 Running track curve of vehicke at 60km/h

图8 84km/h车速曲线
Fig.8 Speed curve of 84km/h

图9 84km/h车辆运行轨迹曲线
Fig.9 Running track curve of vehicle at 84km/h
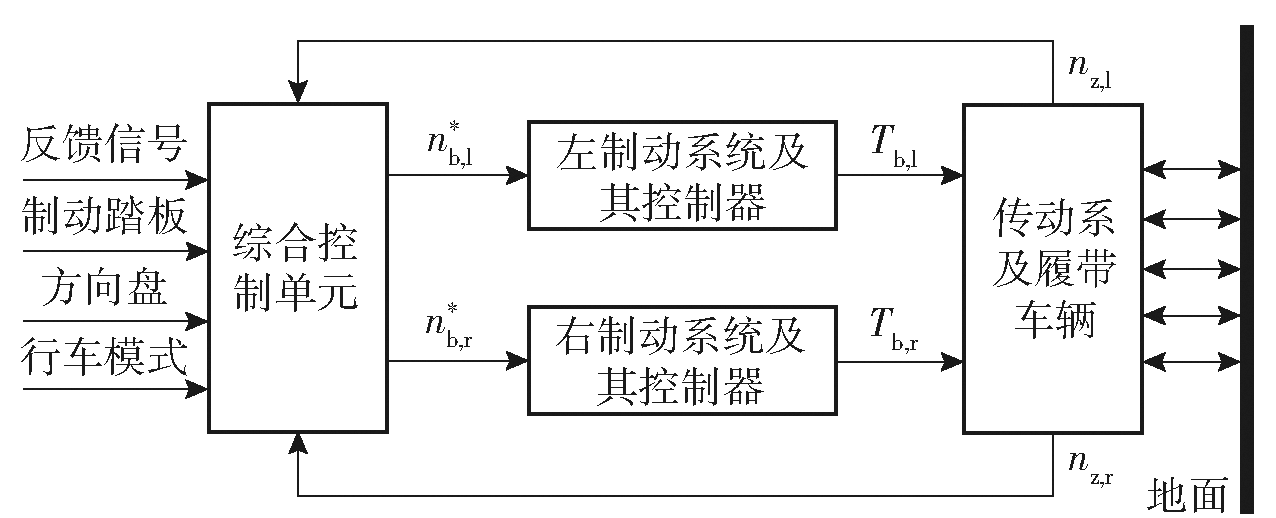
图10 制动避障控制结构
Fig.10 Braking obstacle avoidance control structure

图11 综合控制单元的控制结构
Fig.11 Control structure of integrated control unit
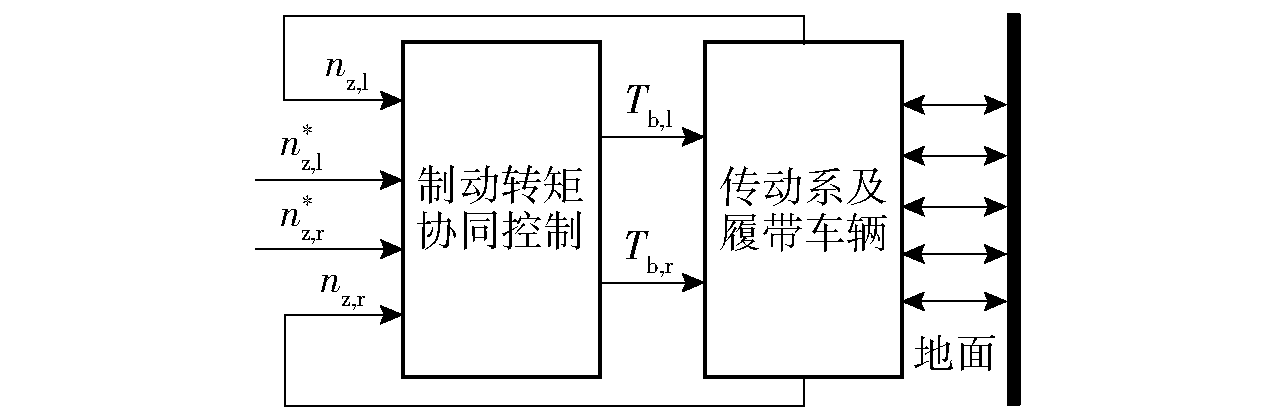
图12 线控液压制动系统控制结构
Fig.12 Control structure of hydraulic brake-by-wire system
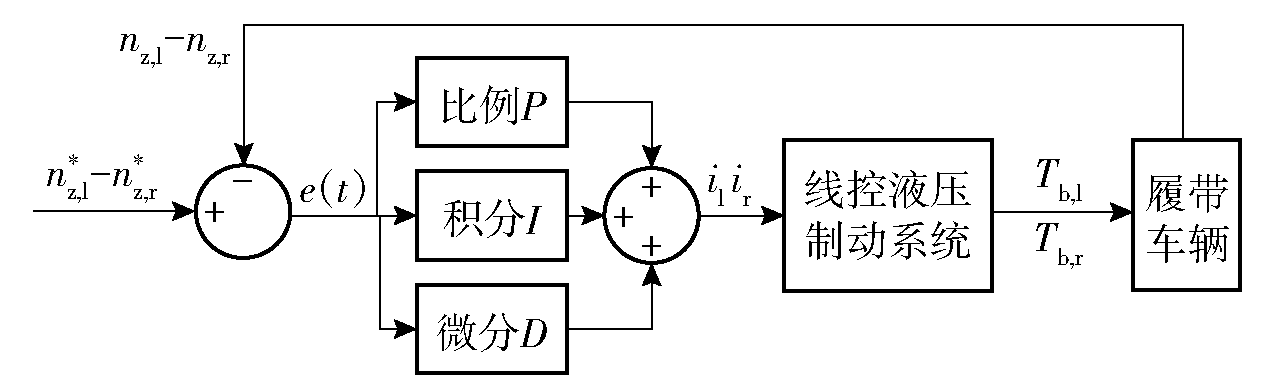
图13 制动转矩协同控制结构
Fig.13 Cooperative control structure of braking torque

图14 基于RT-LAB的半实物实时仿真平台
Fig.14 Hardware-in-the-loop simulation platform based on RT-LAB
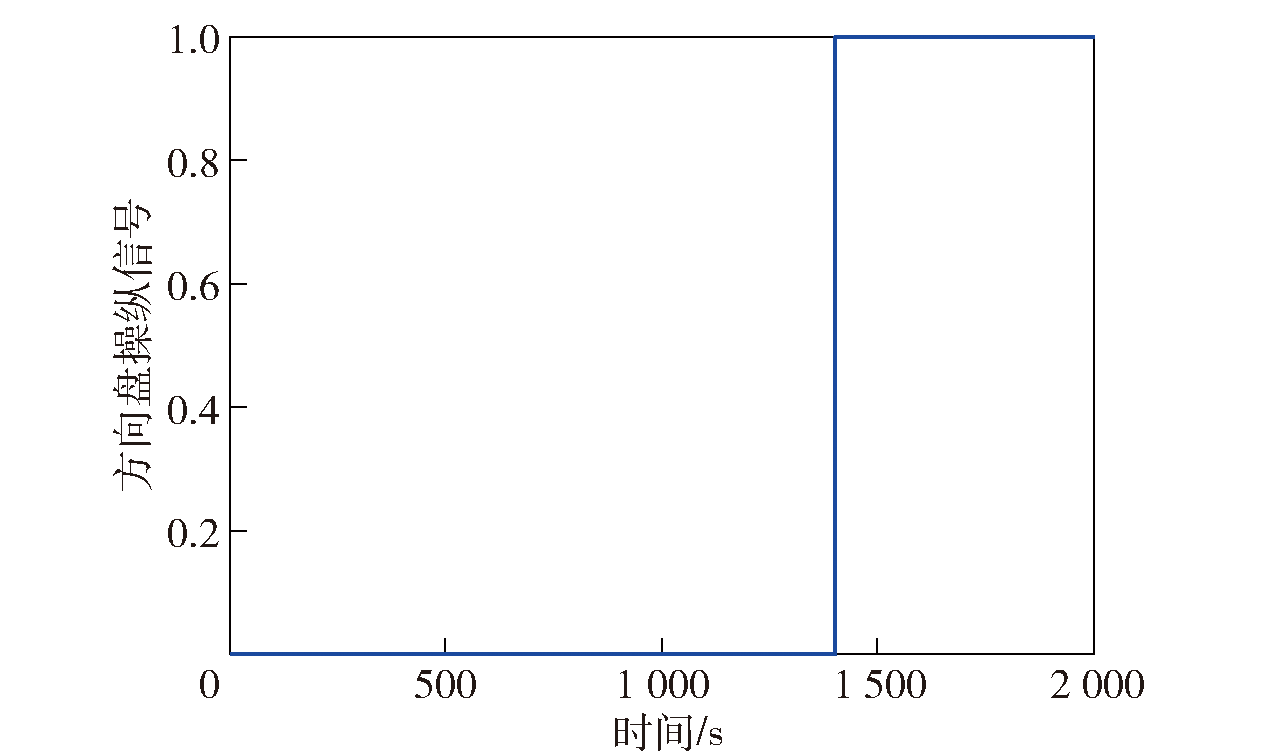
图15 操纵信号
Fig.15 Maneuvering signal
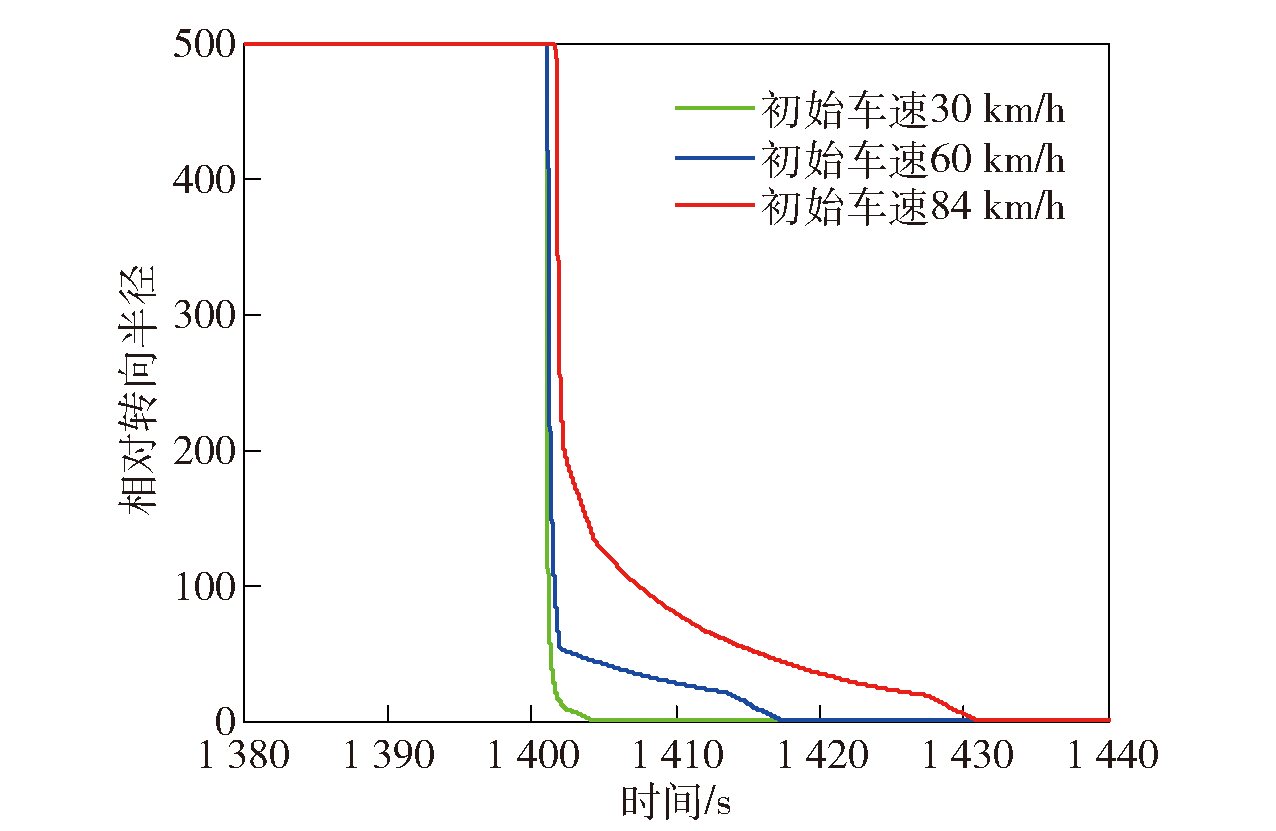
图16 相对转向半径
Fig.16 Relative turning radius
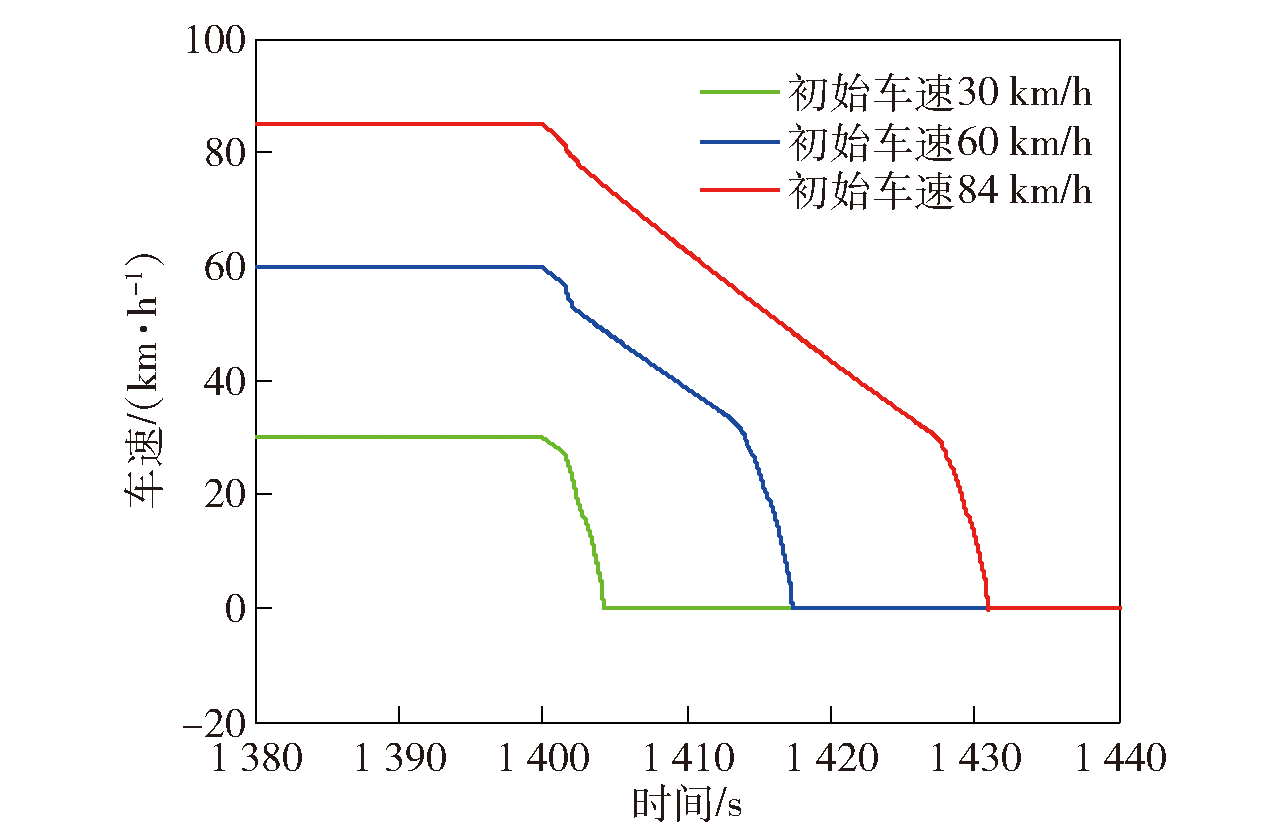
图17 车速
Fig.17 Vehicle speed
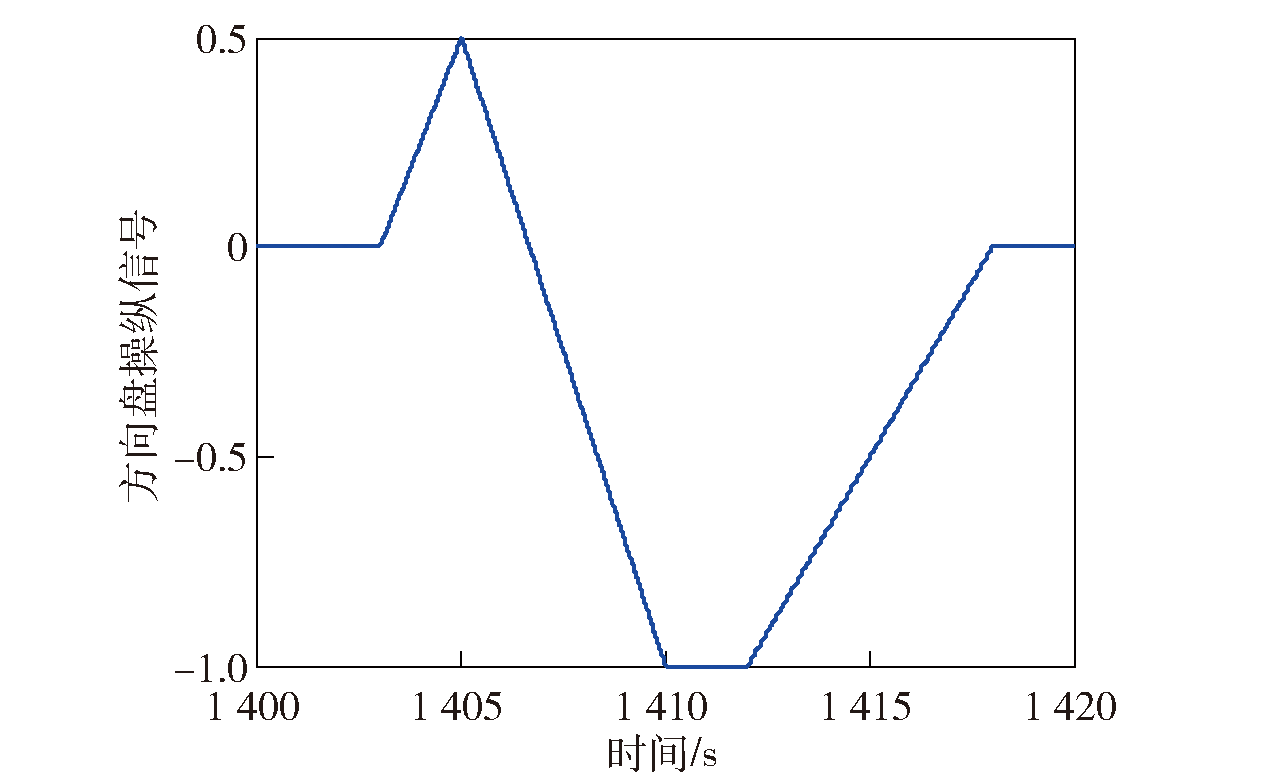
图18 操纵信号
Fig.18 Maneuvering signal
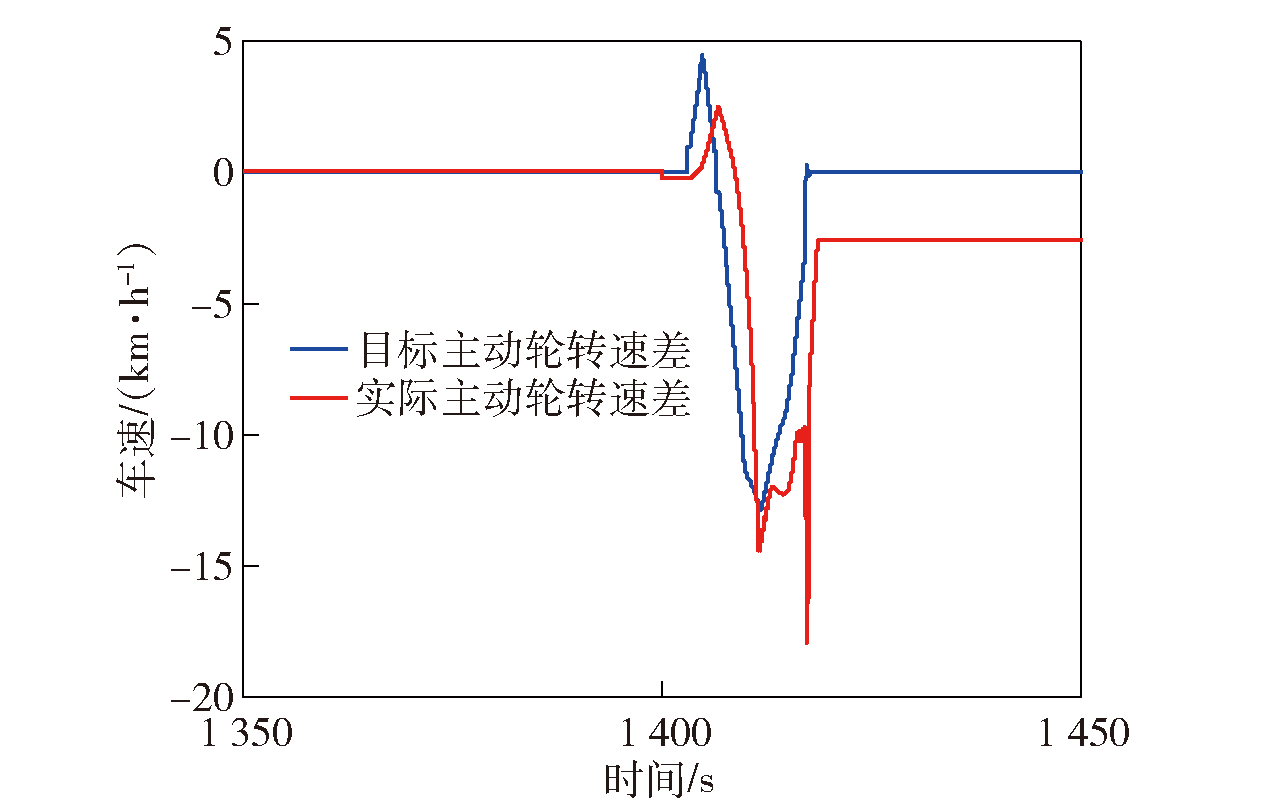
图19 主动轮转速
Fig.19 Driving wheel speed

图20 相对转向半径
Fig.20 Relative turning radius
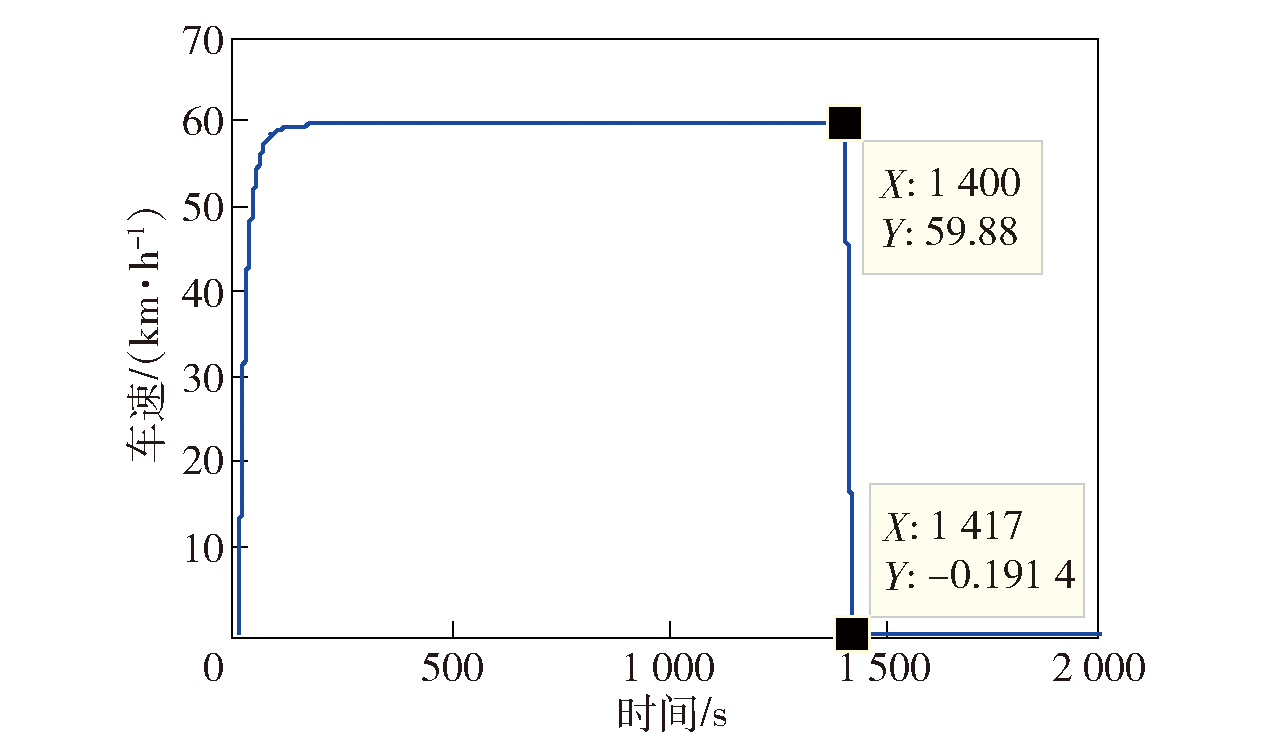
图21 车速
Fig.21 Vehicle speed
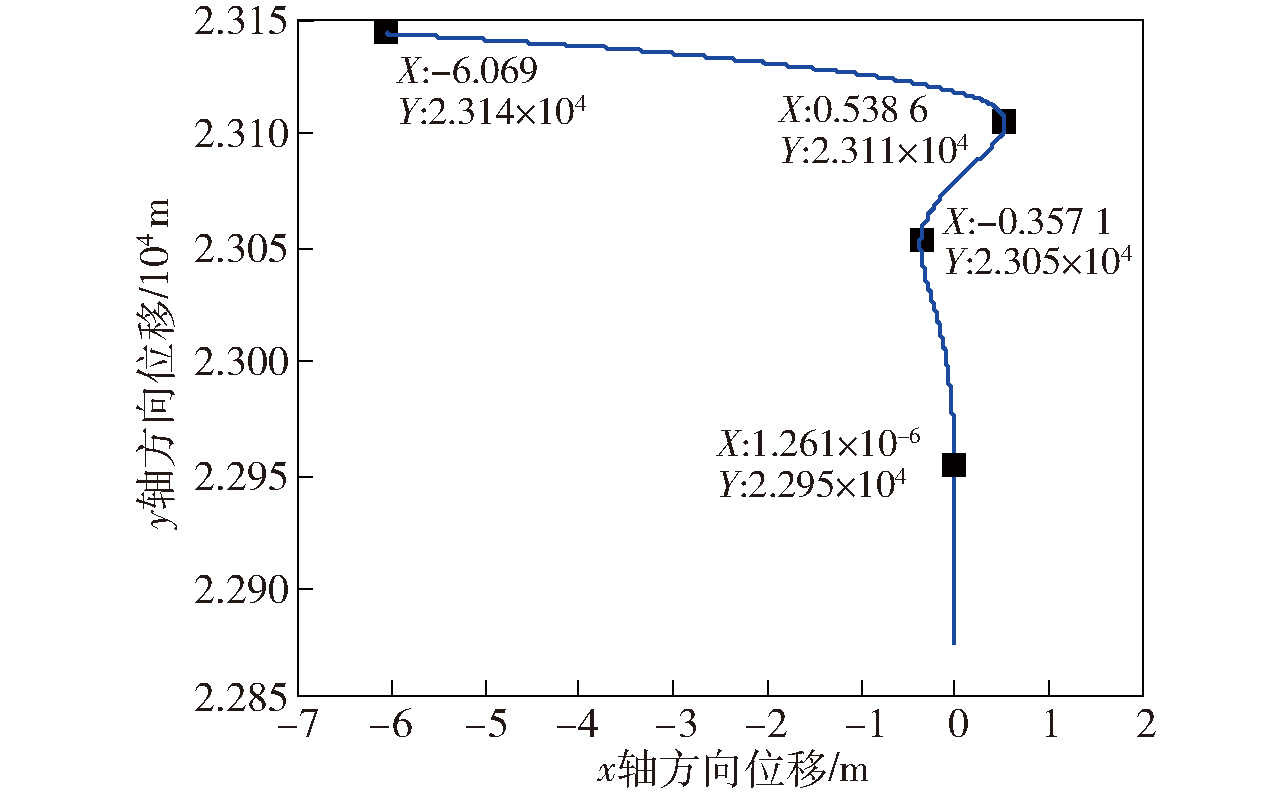
图22 车辆运行轨迹
Fig.22 Vehicle running track
| [1] |
盖江涛, 黄守道, 周广明, 等. 双侧电机驱动的功率耦合机构传动方案设计方法[J]. 中国机械工程, 2014, 25(13):1739-1743.
|
|
|
|
| [2] |
盖江涛, 李慎龙, 周广明, 等. 一种履带车辆机电复合传动装置:中国, CN101985279A[P]. 2011-11-02.
|
|
|
|
| [3] |
闫清东, 张连第, 赵毓芹, 等. 坦克构造与设计[M]. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [4] |
袁艺, 盖江涛, 韩政达, 等. 履带打滑条件下的电驱动车辆转向运动学研究[J]. 车辆与动力技术, 2017(1):6-10.
|
|
|
|
| [5] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16):162-172.
|
|
|
|
| [6] |
芮强, 王红岩, 王钦龙, 等. 基于剪应力模型的履带车辆转向力矩分析与试验[J]. 兵工学报, 2015, 36(6):968-977.
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
| [7] |
doi: 10.1016/j.jterra.2010.02.001 URL |
| [8] |
曾庆含, 马晓军, 廖自力, 等. 双侧电驱动履带车辆等效条件积分滑模稳定转向控制[J]. 兵工学报, 2016, 37(8):1351-1358.
doi: 10.3969/j.issn.1000-1093.2016.08.002 |
|
|
|
| [9] |
刘翼, 盖江涛, 陈泳丹, 等. 电传动履带车辆转向自适应控制策略仿真分析[J]. 车辆与动力技术, 2015(1):5-10.
|
|
|
|
| [10] |
张杰, 袁东, 张朋, 等. 双侧电传动履带车辆模糊前馈反馈转向控制[J]. 兵工学报, 2020, 41(8):1688-1696.
doi: 10.3969/j.issn.1000-1093.2020.08.023 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.023 |
|
| [11] |
程军伟, 高连华, 王红岩, 等. 履带车辆转向分析[J]. 兵工学报, 2007, 28(9):1110-1115.
|
|
|
|
| [12] |
doi: 10.1016/j.jterra.2008.07.003 URL |
| [13] |
盖江涛, 刘春生, 马长军, 等. 考虑履带滑转滑移的电驱动履带车辆转向控制[J]. 兵工学报, 2021, 42(10):2092-2101.
doi: 10.3969/j.issn.1000-1093.2021.10.005 |
|
|
|
| [14] |
盖江涛, 黄守道, 周广明, 等. 双电机耦合驱动履带车辆自适应滑膜转向控制[J]. 兵工学报, 2015, 36(3):405-411.
doi: 10.3969/j.issn.1000-1093.2015.03.004 |
|
|
|
| [15] |
王志翔. 高速机电复合传动履带车辆转向稳定控制研究[D]. 北京: 北京理工大学, 2017.
|
|
|
|
| [16] |
王博. 机电复合传动履带车辆转向过程性能预测研究[D]. 北京: 北京理工大学, 2016.
|
|
|
|
| [17] |
张林晖. 基于转矩的履带车辆转向过程协调控制研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [18] |
李荣利, 李善乐, 芮强, 等. 考虑履带滑动的履带车辆转向载荷比分析与验证[J]. 机械工程师, 2018(1):92-95.
|
|
|
|
| [19] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3):600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [20] |
邹渊, 孙逢春, 张承宁. 电传动履带车辆“驾驶员-综合控制器”在环的双侧驱动控制实时仿真[J]. 机械工程学报, 2007, 43(3):193-198.
|
|
|
| [1] | 袁艺,盖江涛,曾根,周广明,李训明,马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107. |
| [2] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [3] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [4] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| [5] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [6] | 曾子豪, 张京东, 龚雪莲, 刘坤明, 桂学文, 廖日东. 拉伸载荷下双销式履带板强度计算方法[J]. 兵工学报, 2023, 44(3): 831-840. |
| [7] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [8] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [9] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [10] | 袁艺, 盖江涛, 周广明, 高秀才, 李训明, 马长军. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213. |
| [11] | 帅志斌, 贺帅, 李国辉, 李耀恒, 李勇, 张颖, 简洪超. 特种履带车辆机电复合传动装置低温启动过程建模与优化控制[J]. 兵工学报, 2023, 44(1): 117-128. |
| [12] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [13] | 张伟, 刘辉, 韩立金, 刘宝帅, 张勋, 张万年. 混合动力履带车辆机电联合制动控制[J]. 兵工学报, 2022, 43(5): 969-981. |
| [14] | 王博洋, 关海杰, 龚建伟, 陈慧岩, 赵卉菁. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2): 241-251. |
| [15] | 徐保荣, 王涛, 梁梓. 基于操纵动作预测的履带车辆载荷谱编制方法与流程[J]. 兵工学报, 2022, 43(2): 252-259. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4