
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (4): 1094-1107.doi: 10.12382/bgxb.2022.1300
袁艺, 盖江涛*( ), 曾根, 周广明, 李训明, 马长军
), 曾根, 周广明, 李训明, 马长军
收稿日期:2022-12-30
上线日期:2024-04-30
通讯作者:
YUAN Yi, GAI Jiangtao*(), ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun
Received:2022-12-30
Online:2024-04-30
摘要:
为研究高速履带车辆操纵特性,奠定高速电驱动履带车辆的操纵稳定性评价及控制的基础,建立了高速履带车辆非线性转向动力学模型及2自由度线性转向动力学模型,并对模型进行试验验证。利用2自由度线性模型推导了高速履带车辆横摆运动传递函数,基于此进行了高速履带车辆横摆运动时域和频域响应特性分析,提出履带车辆稳态横摆角速度增益及临界阻尼车速的定义。研究结果表明:履带车辆稳态横摆角速度增益均小于1,履带车辆具有不足转向特性;履带车辆系统阻尼比在1左右;当车速小于临界阻尼车速时,车辆系统为过阻尼系统,横摆角速度响应的上升时间在0.2s内;当车速等于临界阻尼车速时,车辆系统为临界阻尼系统,横摆角速度响应的上升时间大于10s;当车速大于临界阻尼车速时,车辆系统为欠阻尼系统,横摆角速度响应的上升时间迅速减小至2~3s。
中图分类号:
袁艺, 盖江涛, 曾根, 周广明, 李训明, 马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107.
YUAN Yi, GAI Jiangtao, ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun. Analysis and Experimental Verification of Yaw Motion Response Characteristics of High-speed Tracked Vehicle[J]. Acta Armamentarii, 2024, 45(4): 1094-1107.
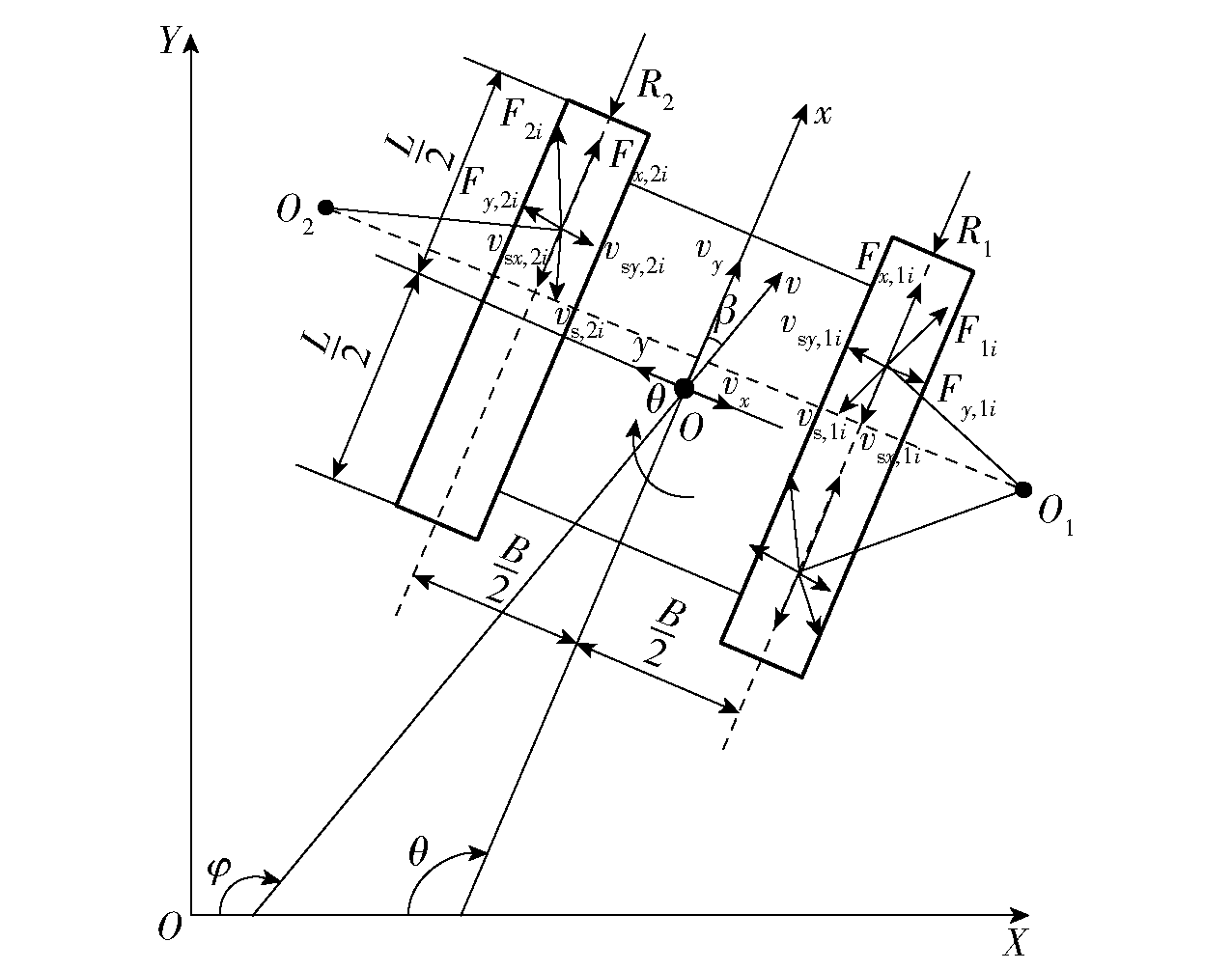
图1 履带车辆转向平面运动示意图
Fig.1 Steering plane motion diagram of tracked vehicle
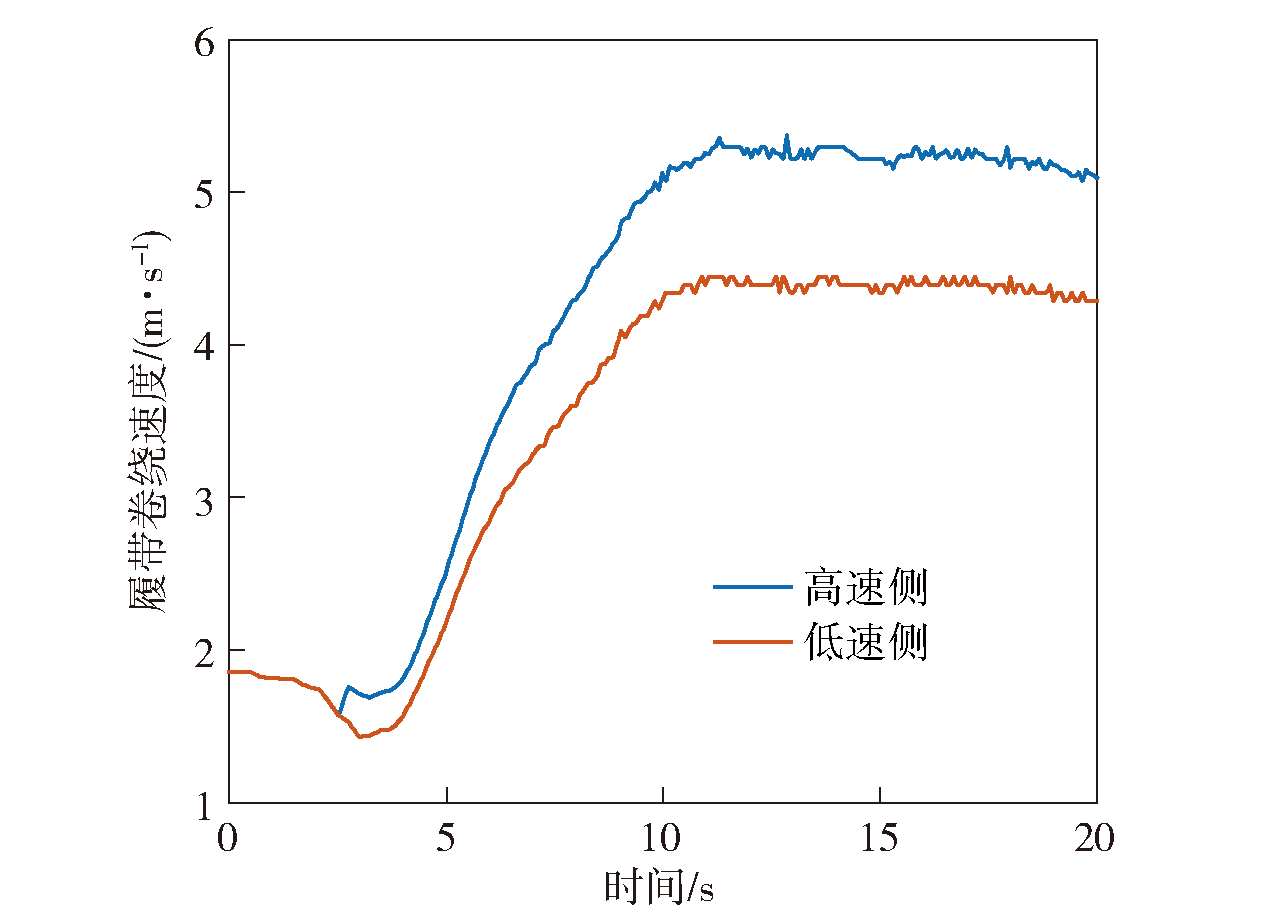
图2 履带卷绕速度
Fig.2 Crawler winding speed
| 参数 | 数值 |
|---|---|
| m/kg | 20380 |
| L/m | 4.51 |
| B/m | 2.84 |
| H/m | 1.11 |
| n | 6 |
| rz/m | 0.2626 |
| K | 20 |
| μ0 | 0.8 |
表1 仿真参数
Table 1 Simulation parameters
| 参数 | 数值 |
|---|---|
| m/kg | 20380 |
| L/m | 4.51 |
| B/m | 2.84 |
| H/m | 1.11 |
| n | 6 |
| rz/m | 0.2626 |
| K | 20 |
| μ0 | 0.8 |
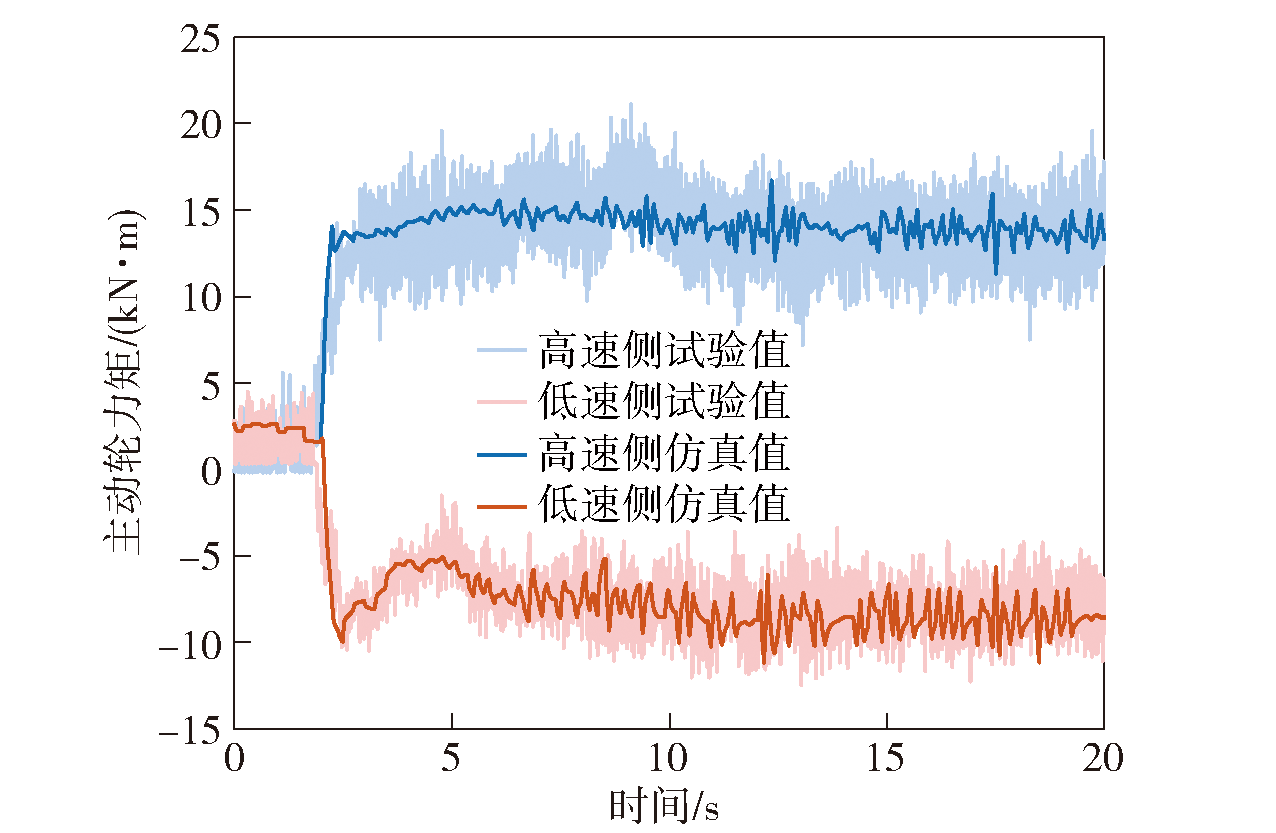
图3 主动轮力矩试验值与仿真值对比
Fig.3 Comparison between test and simulated values of sprocket torque
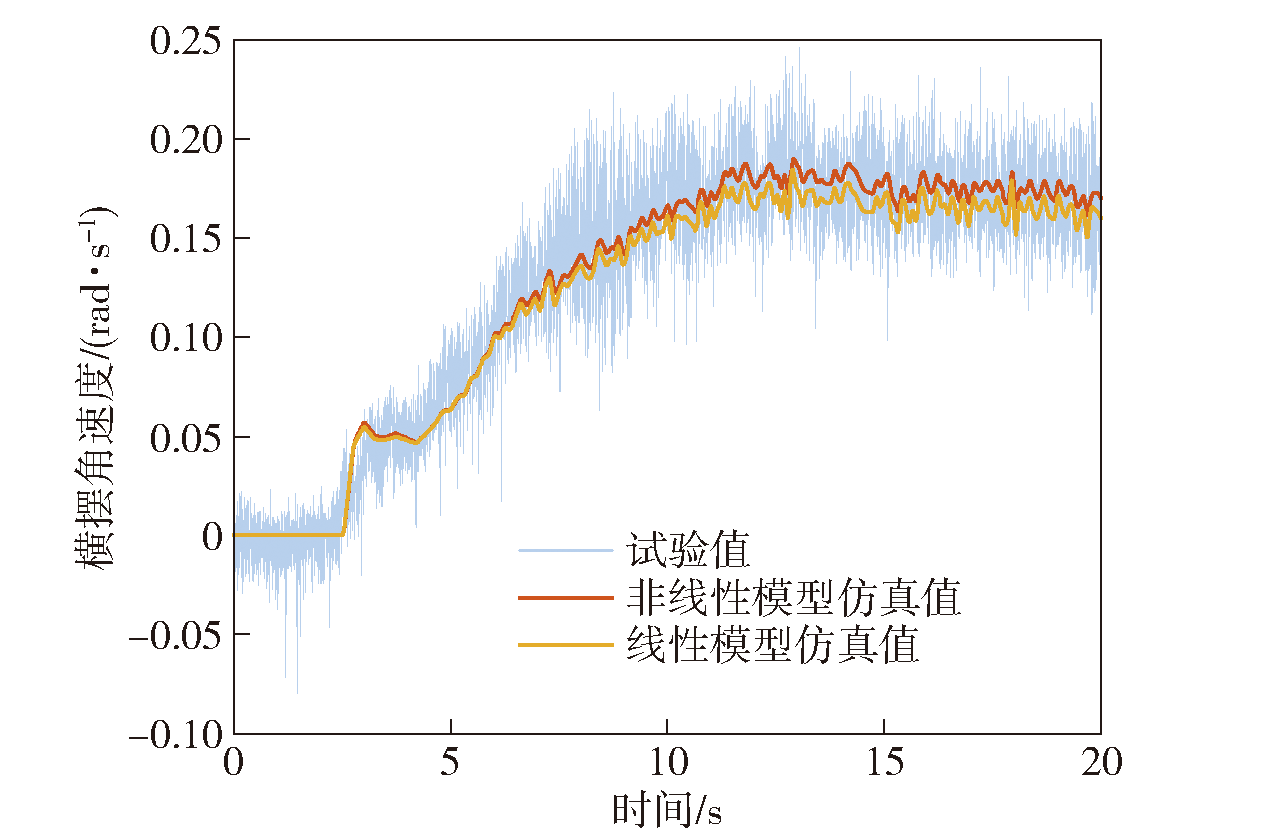
图4 横摆角速度试验值与两种模型仿真值对比
Fig.4 Comparison between yaw rate test and simulated values of two models
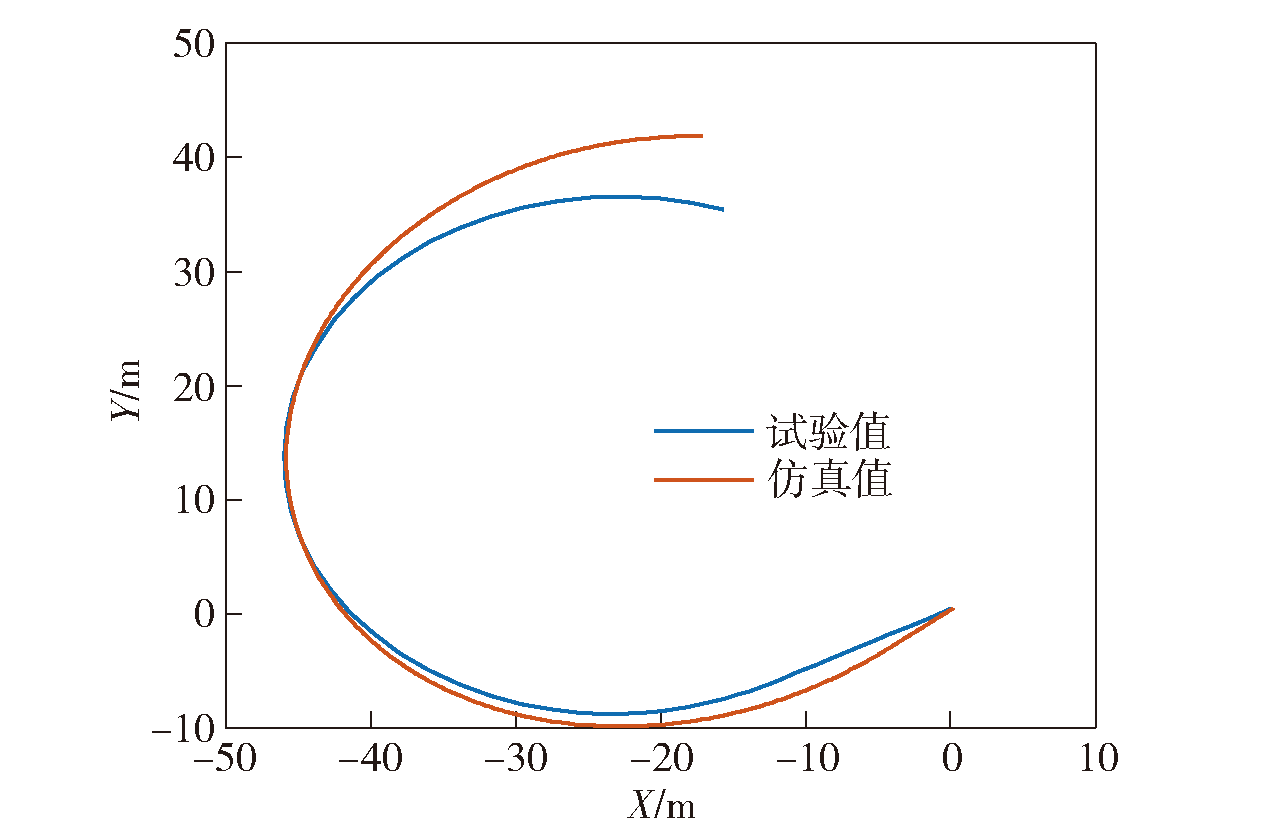
图5 车辆运动轨迹试验值与仿真值对比
Fig.5 Comparison between test and simulated values of vehicle motion track
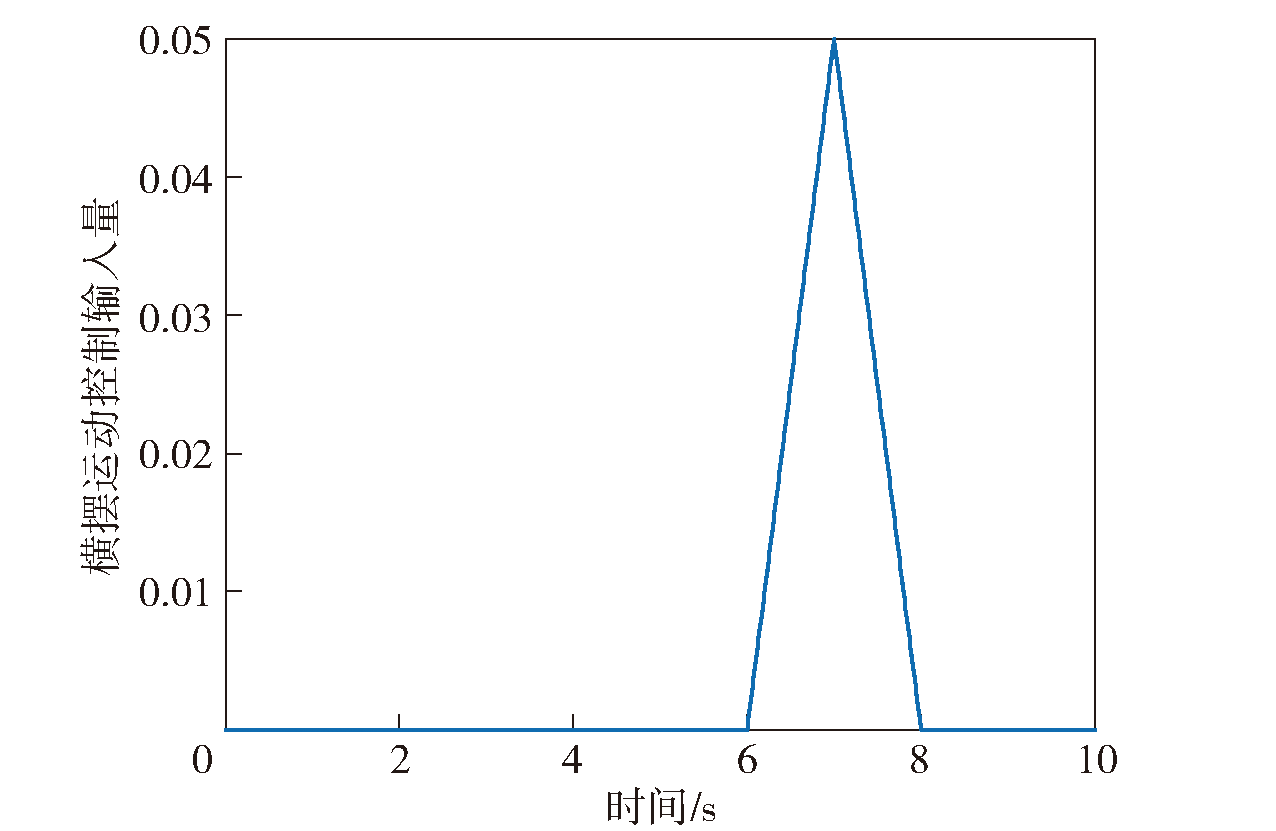
图6 横摆运动控制输入量
Fig.6 Yaw motion control input
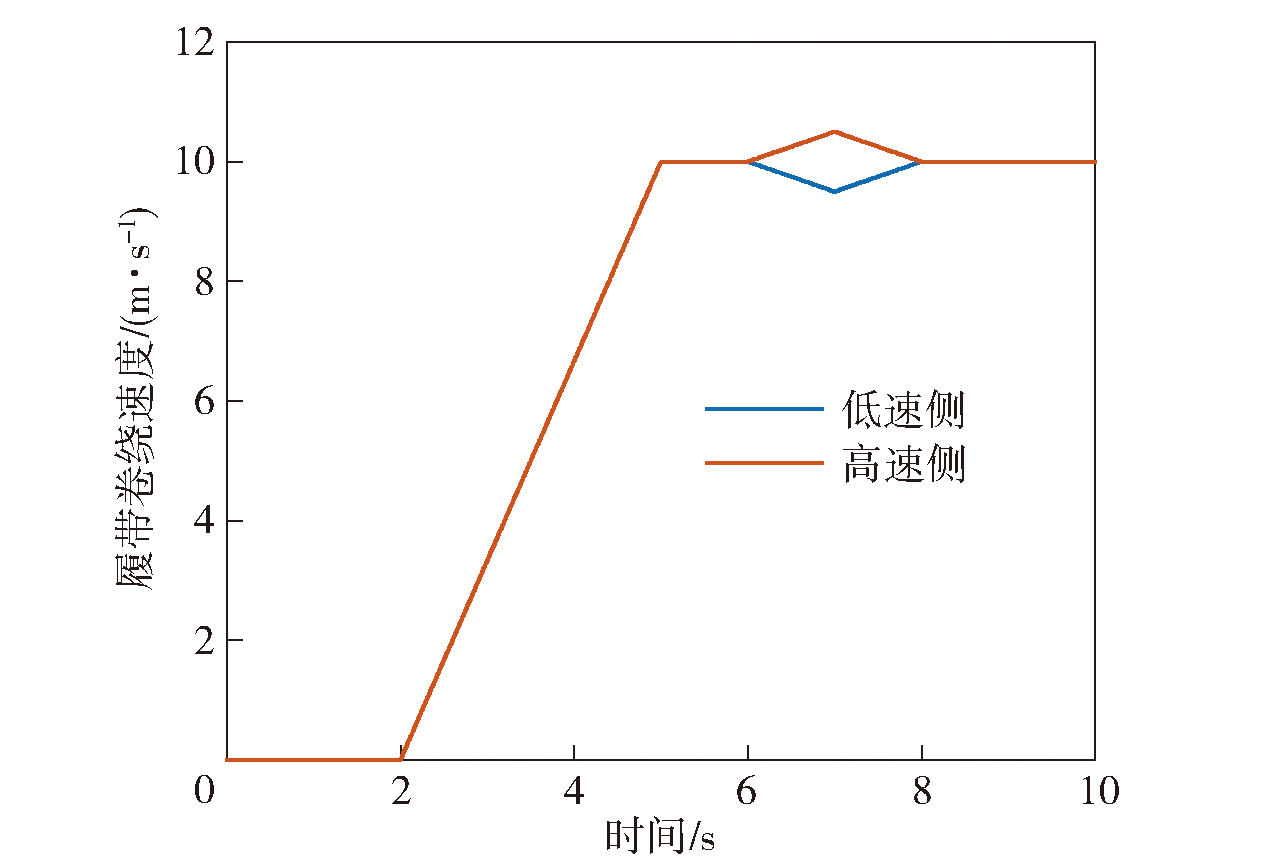
图7 履带卷绕速度
Fig.7 Crawler winding speed
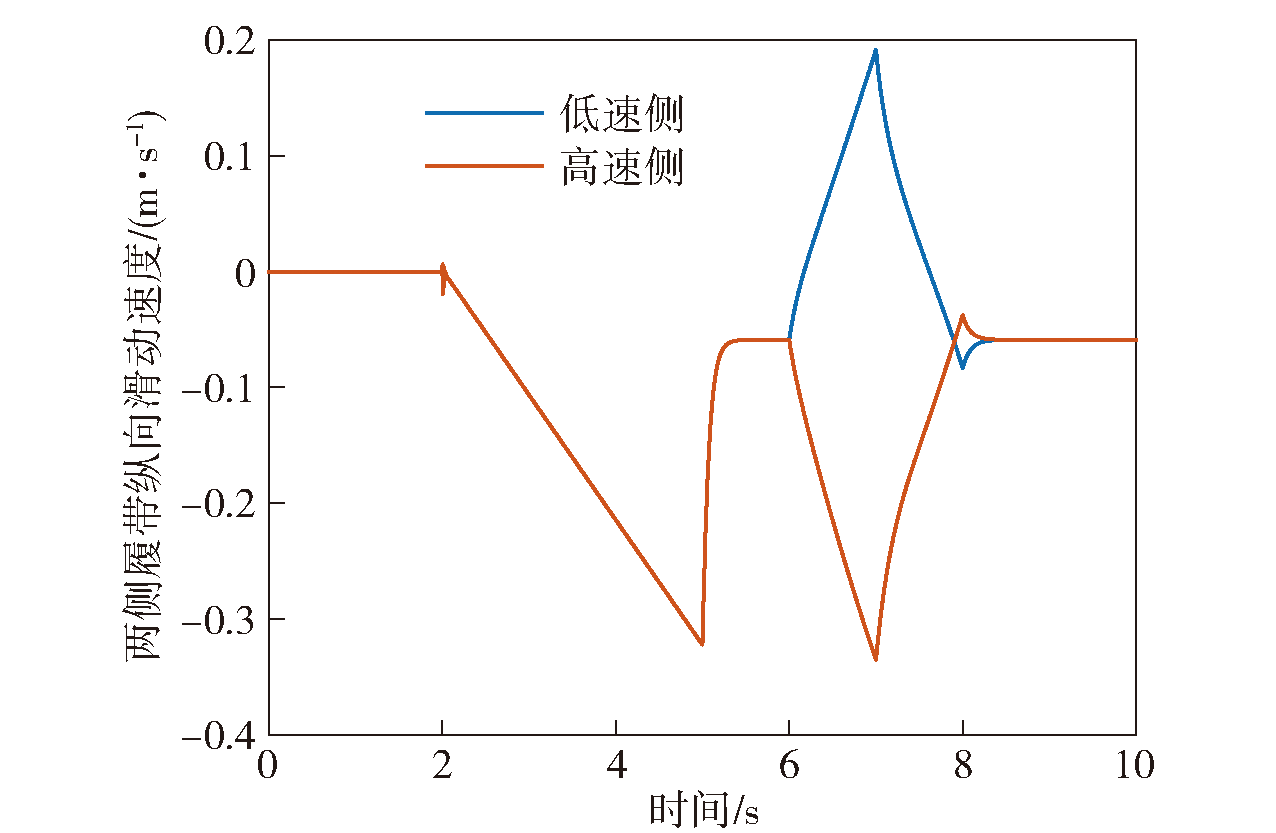
图8 履带纵向滑动速度
Fig.8 Longitudinal sliding speed of track
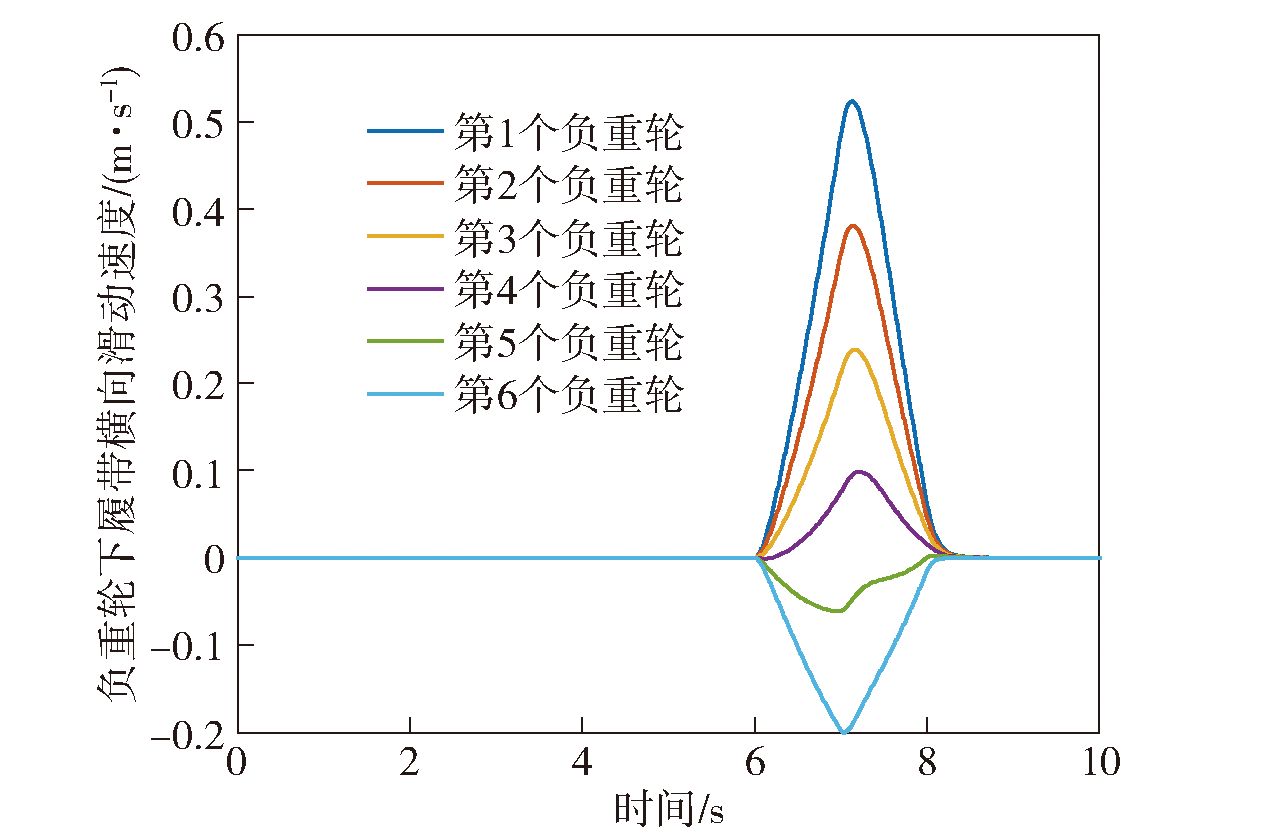
图9 各负重轮下履带横向滑动速度
Fig.9 Lateral sliding speed of track under the load wheel
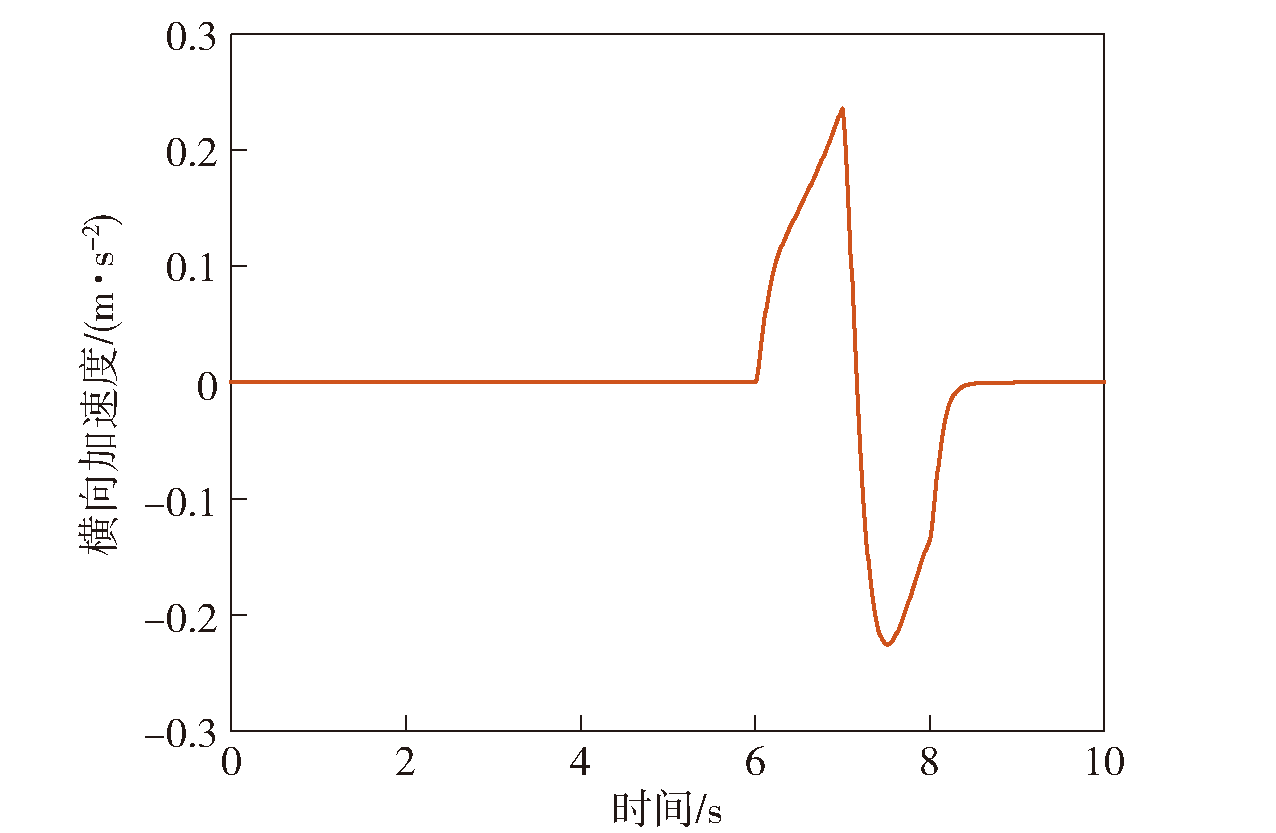
图10 横向加速度
Fig.10 Lateral acceleration
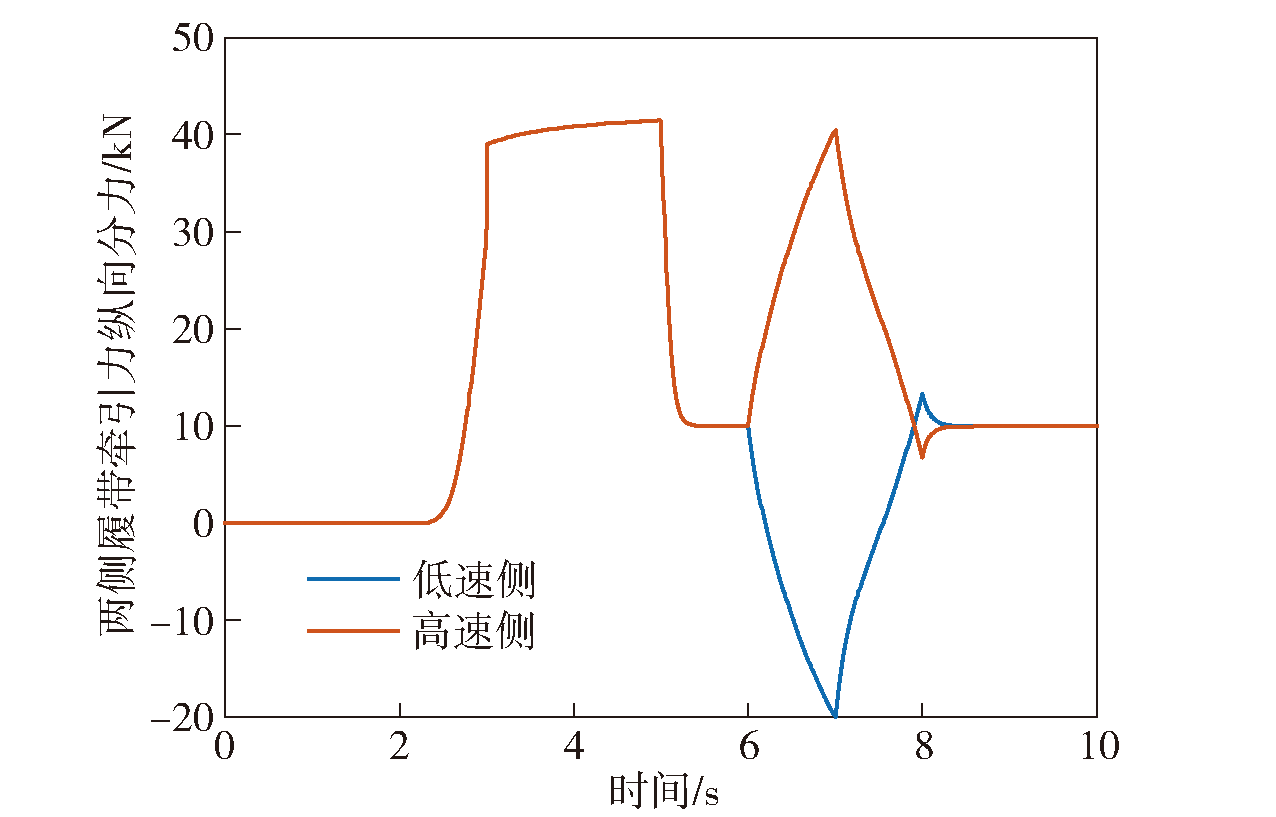
图11 履带牵引力纵向分力
Fig.11 Longitudinal component of track traction
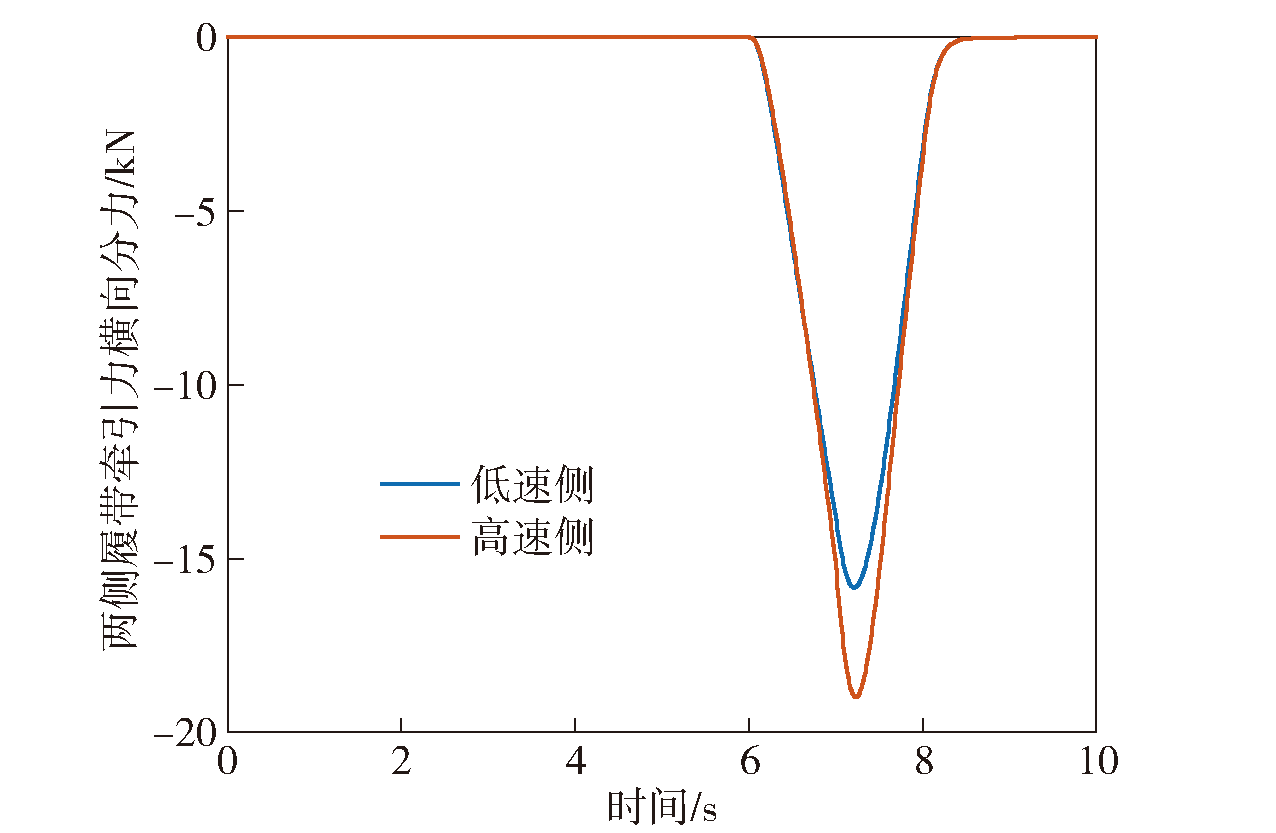
图12 履带牵引力横向分力
Fig.12 Lateral component of track traction
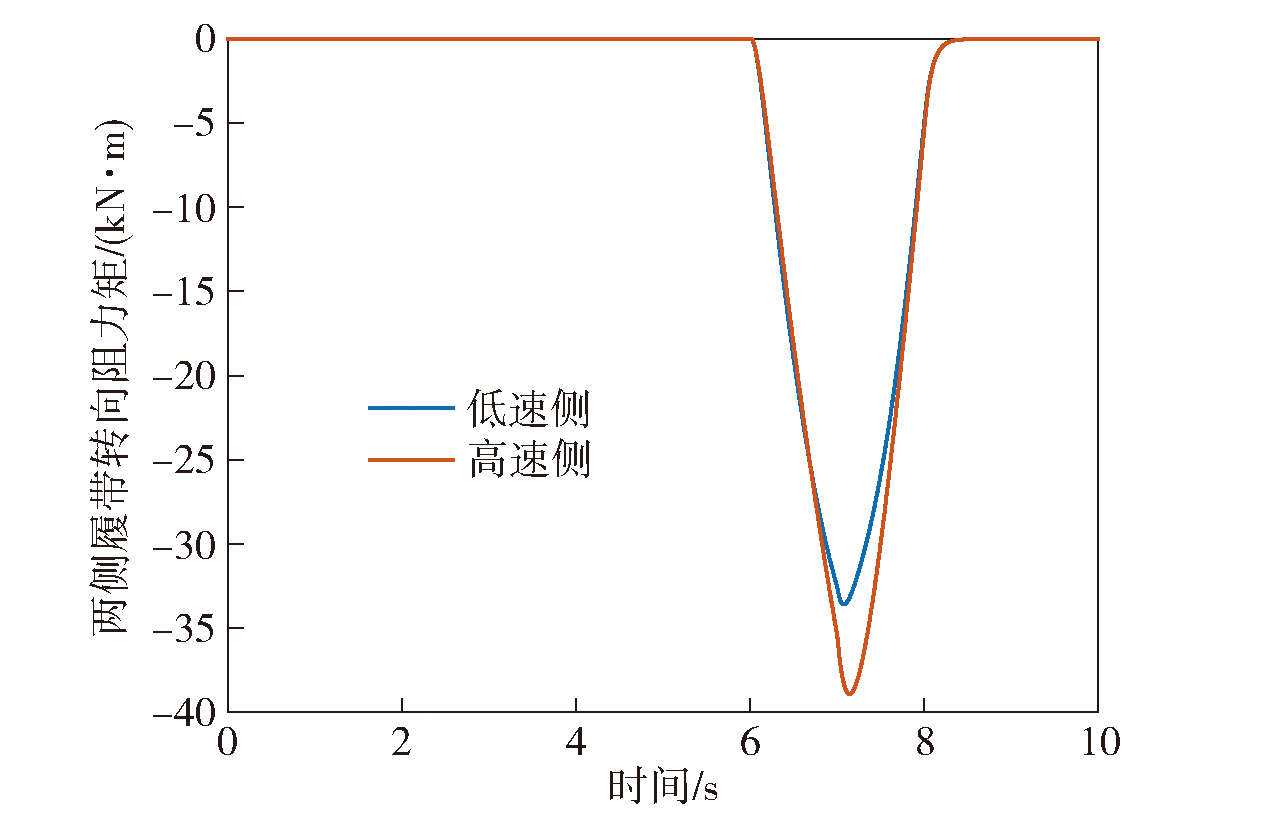
图13 履带转向阻力矩
Fig.13 Track steering resistance torque
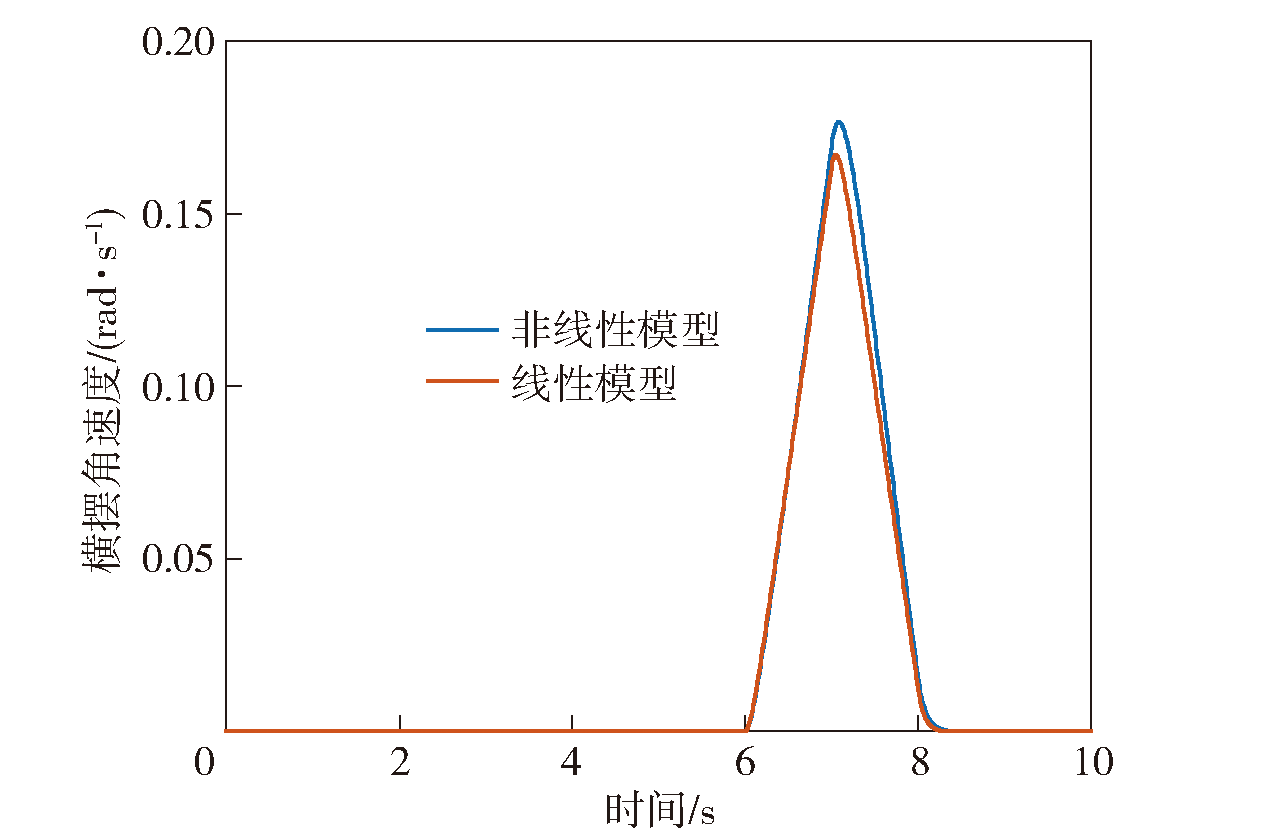
图14 非线性模型及线性模型横摆角速度对比
Fig.14 Comparison of yaw rates of nonlinear model and linear model
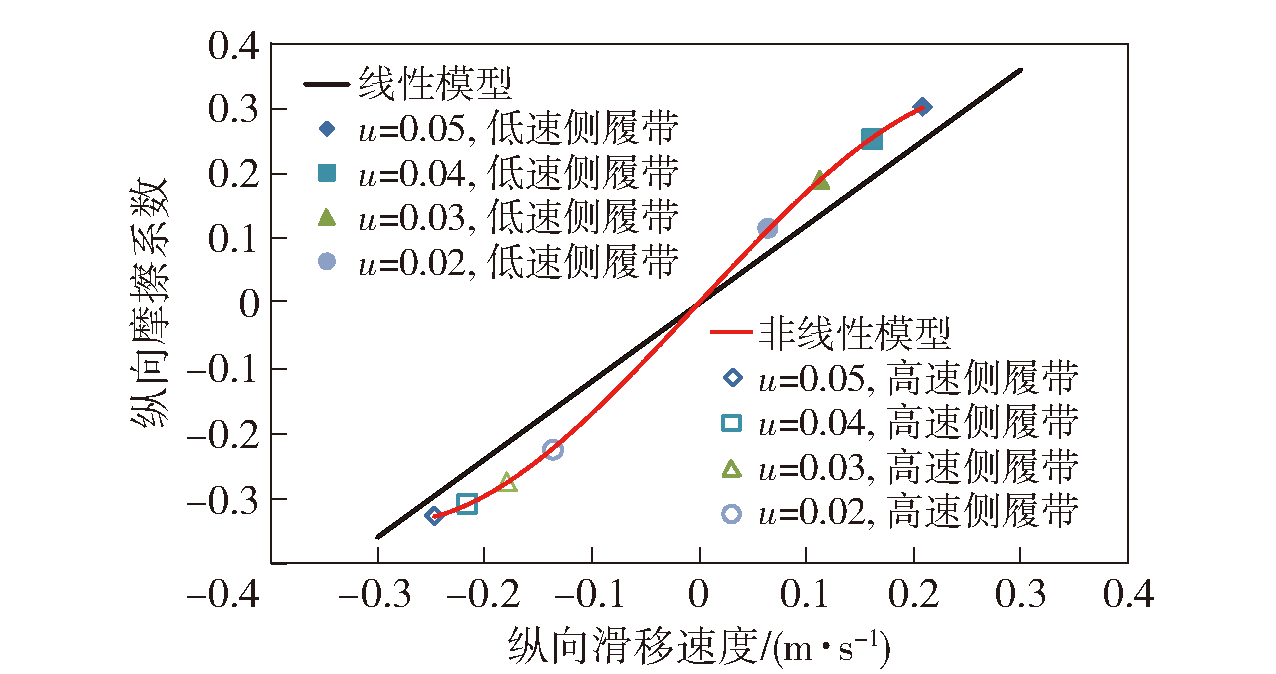
图15 纵向摩擦系数与滑动速度之间的关系
Fig.15 Relationship between longitudinal friction coefficient and longitudinal slip speed
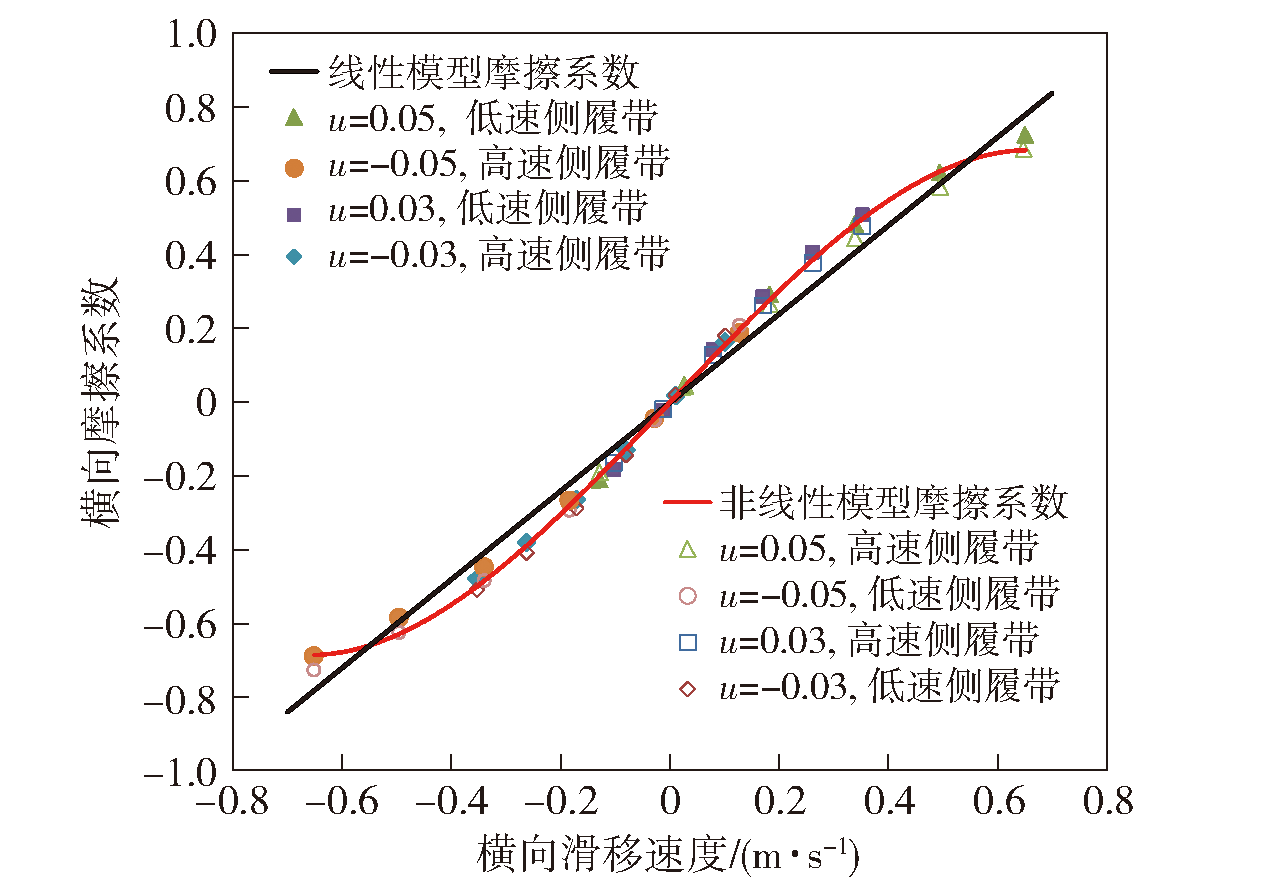
图16 横向摩擦系数与滑动速度之间的关系
Fig.16 Relationship between longitudinal friction coefficient and lateral slip speed
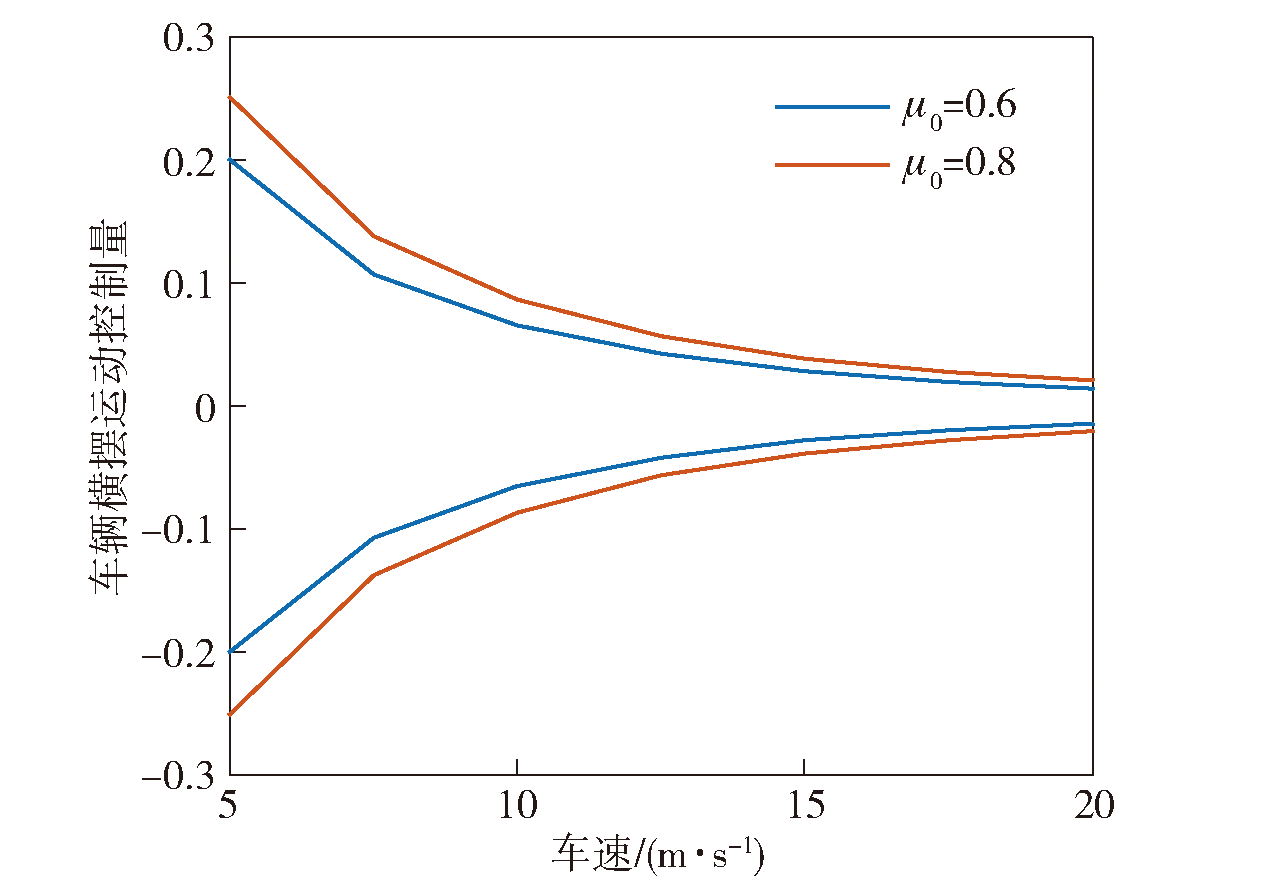
图17 线性模型适用范围
Fig.17 Applicable scope of linear model
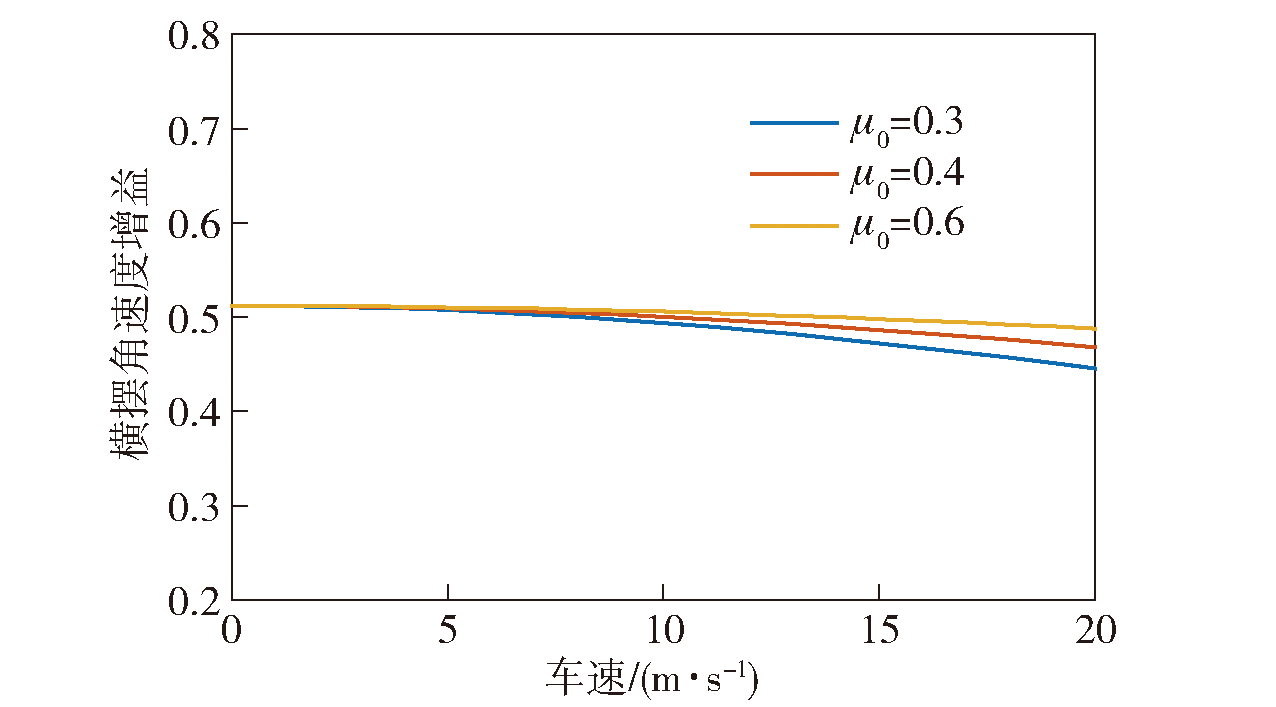
图18 不同路面条件下横摆角速度增益随车速变化曲线
Fig.18 Curves of yaw rate gain versus vehicle speed under different road conditions
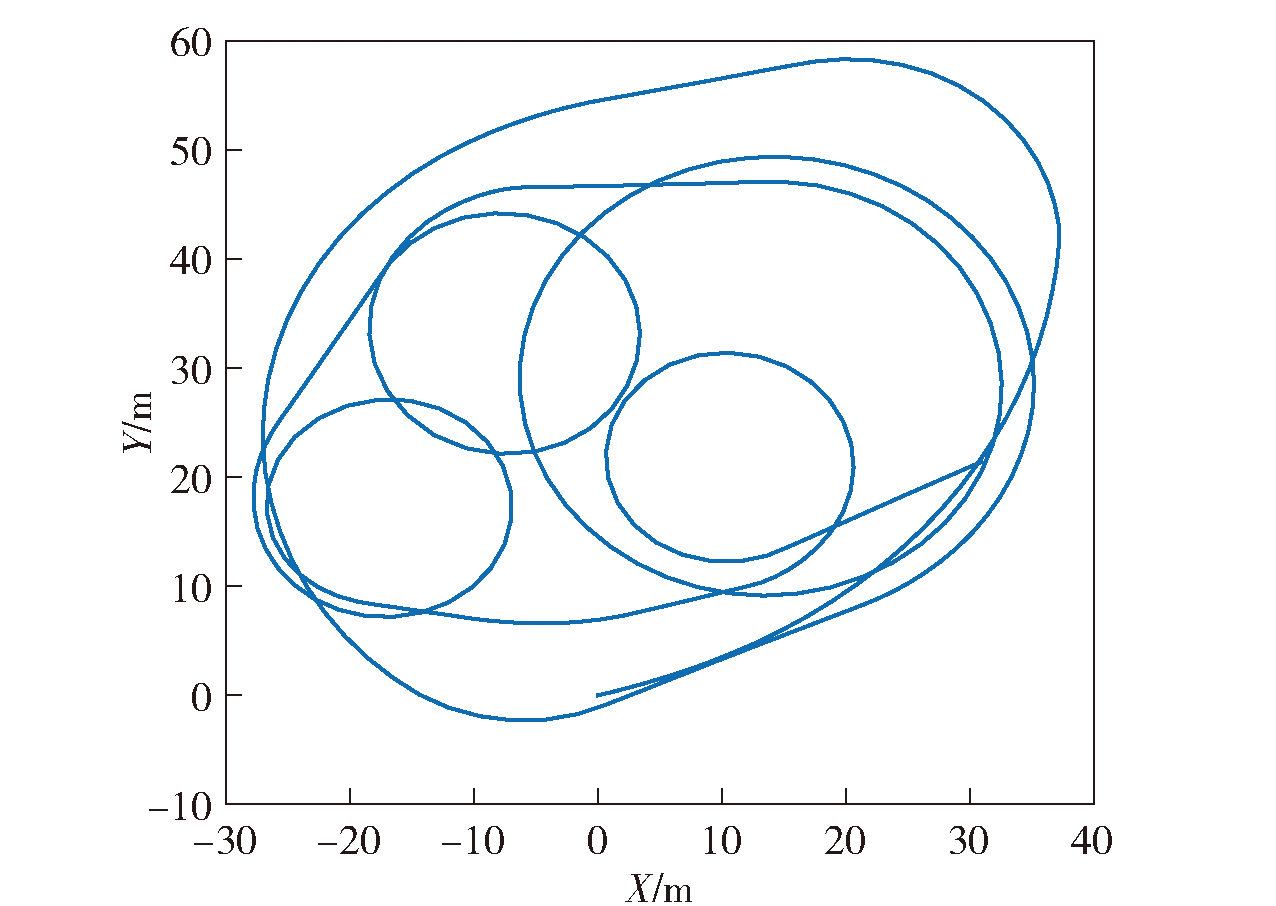
图19 车辆行驶轨迹试验测试结果
Fig.19 Vehicle motion track
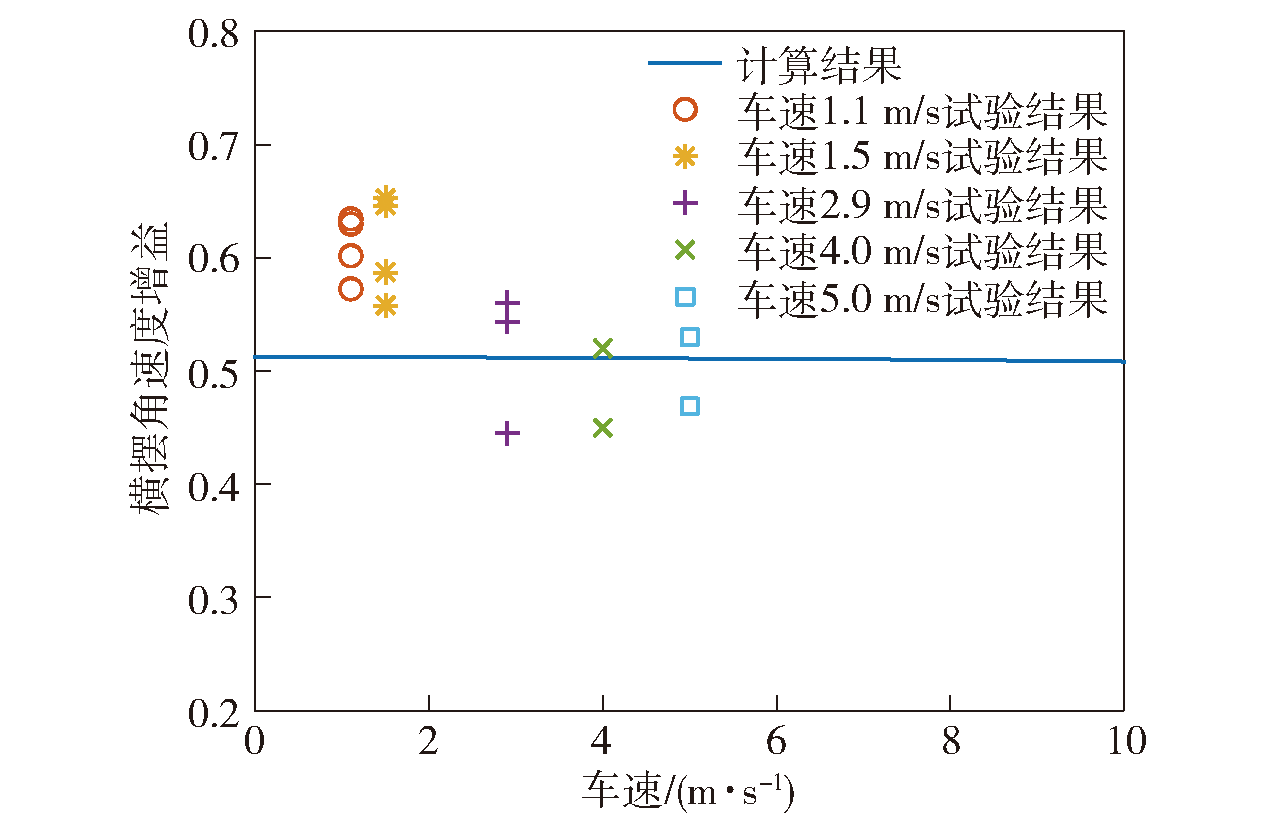
图20 横摆角速度增益试验结果与计算结果对比
Fig.20 Comparison of yaw rate gain test and calculated results
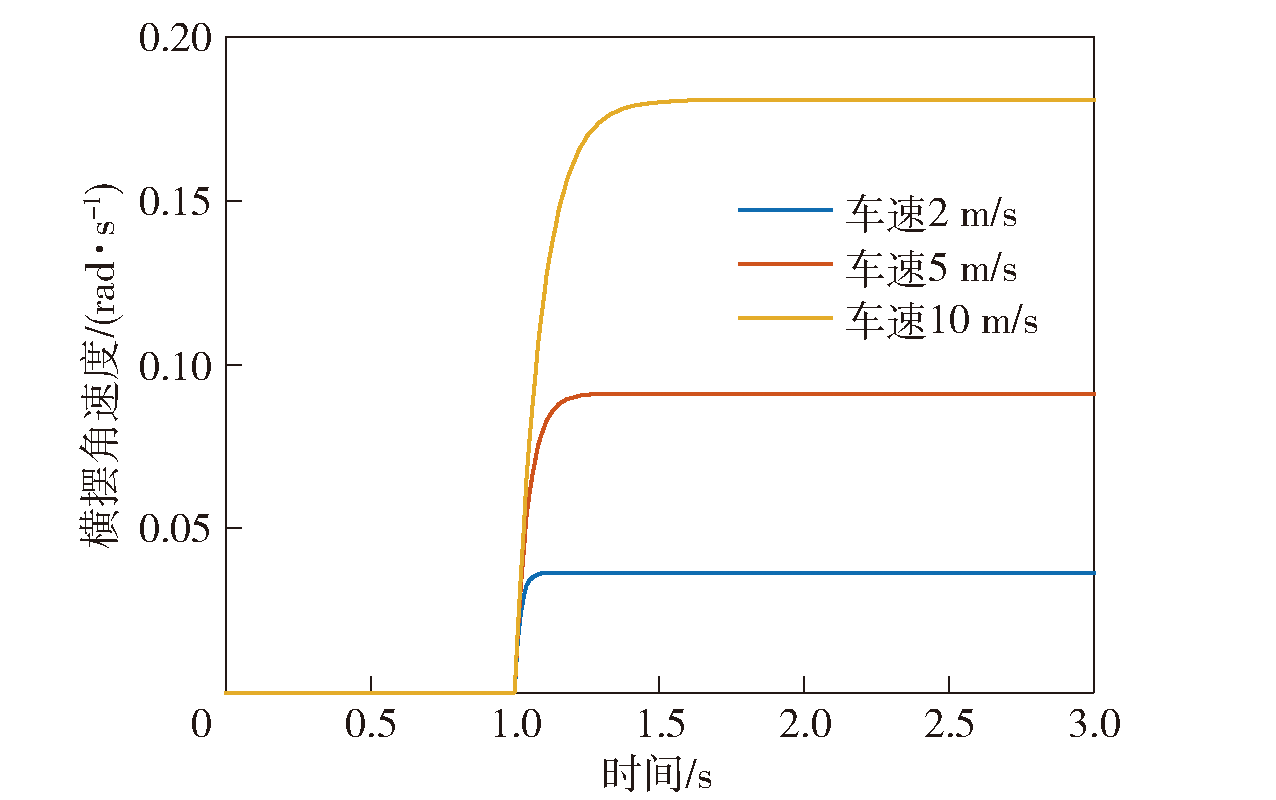
图21 不同车速下车辆横摆角速度阶跃响应
Fig.21 Step responses of vehicle yaw rate at different speeds
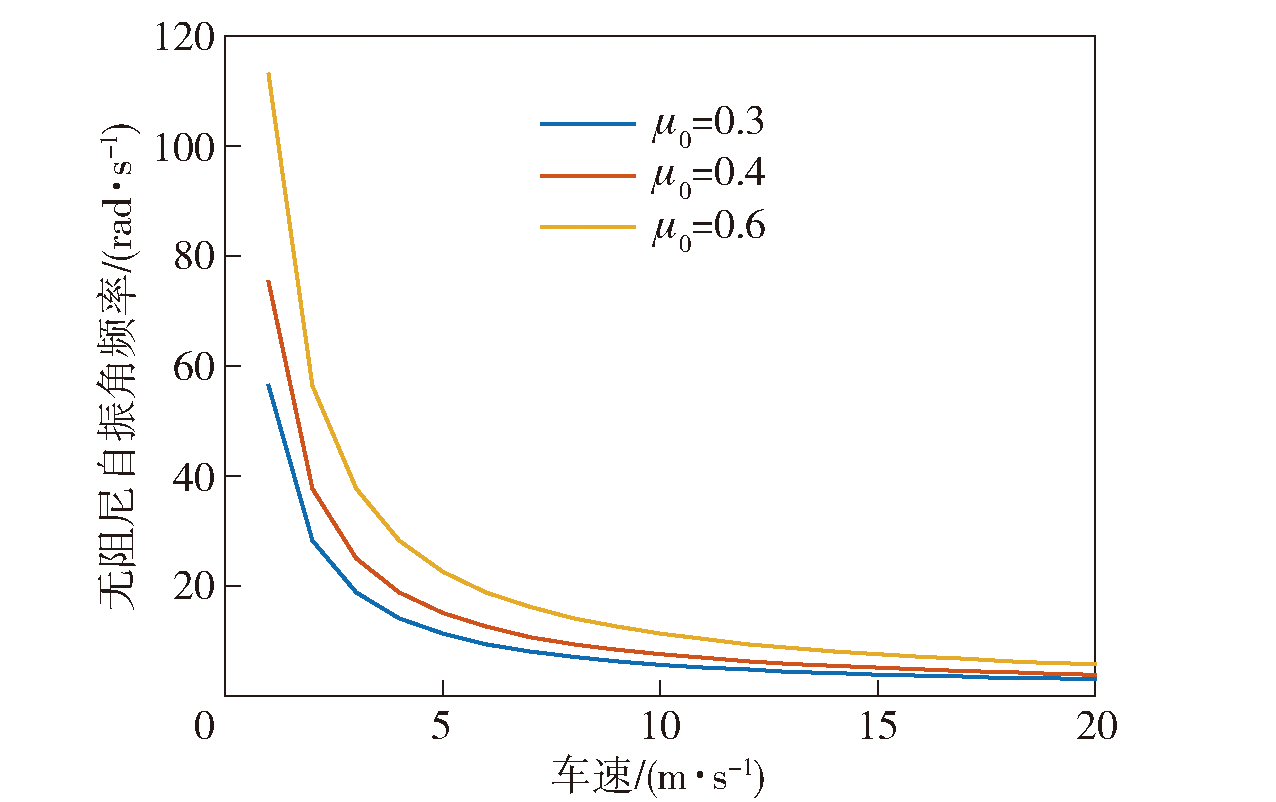
图22 不同路面条件下无阻尼自振角频率随车速变化曲线
Fig.22 Curves of undamped natural vibration anglular frequency changing with vehicle speed under different road conditions
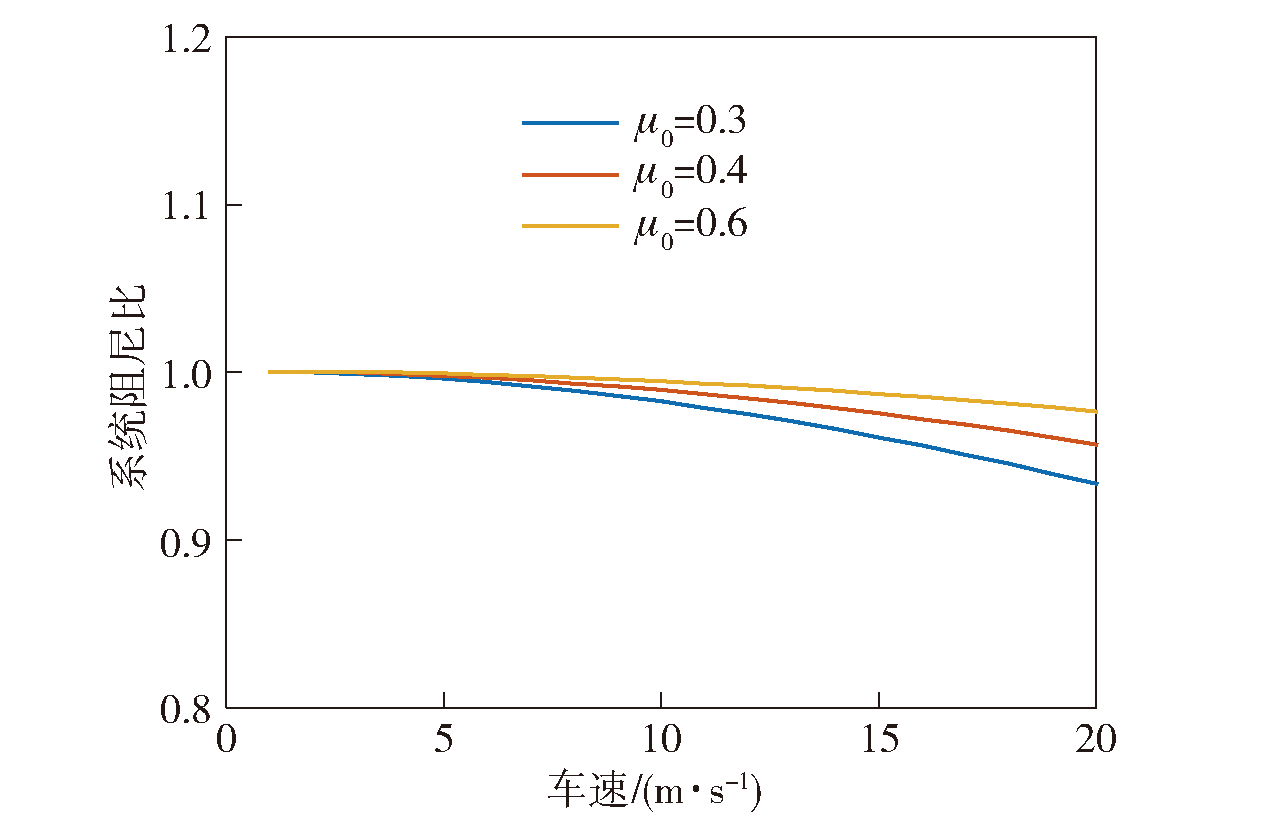
图23 不同路面条件下系统阻尼比随车速变化曲线
Fig.23 Curves of system damping ratio changing with vehicle speed under different road conditions
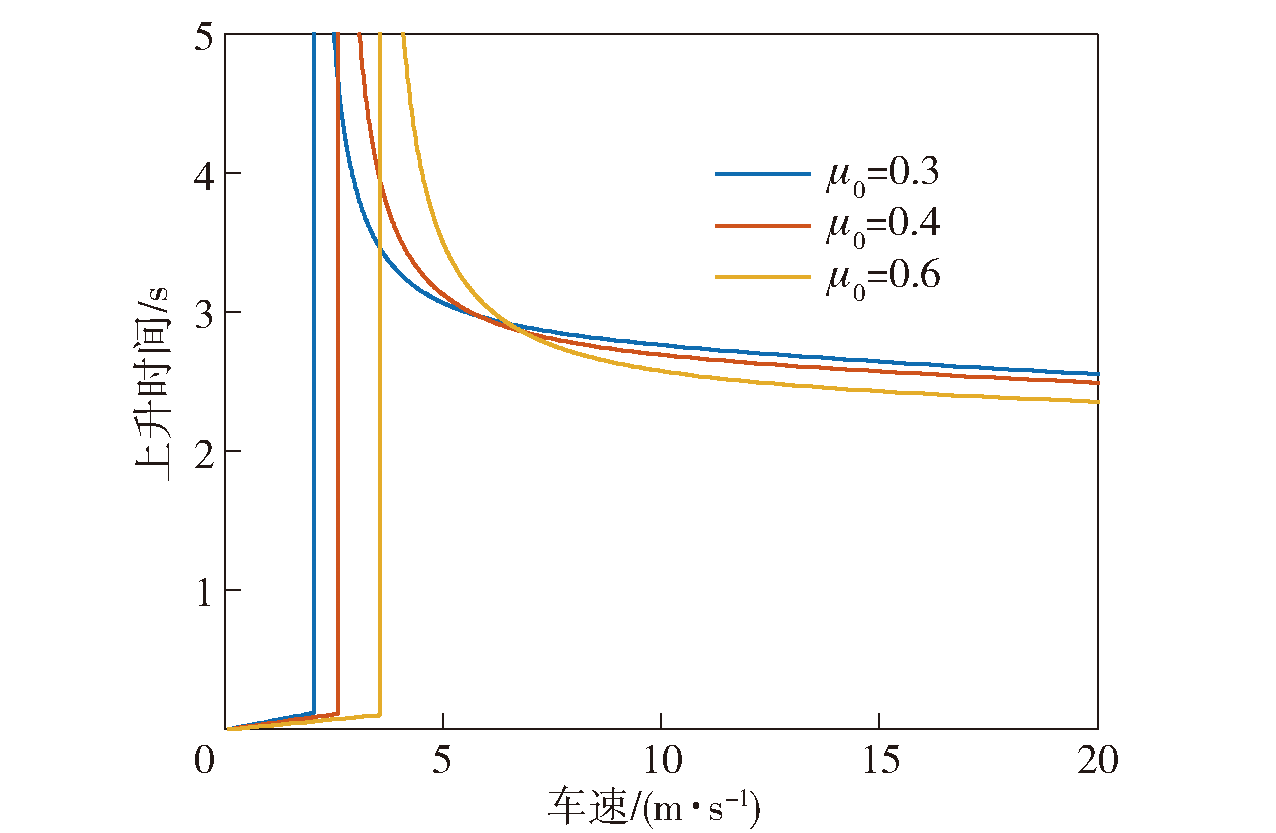
图24 不同路面条件下上升时间随车速变化曲线
Fig.24 Curves of rise time changing with vehicle speed under different road conditions
图25 不同路面条件下峰值时间随车速变化曲线
Fig.25 Curves of peak time changing with vehicle speed under different road conditions
图26 不同车速下横摆角速度频率响应特性
Fig.26 Frequency response characteristics of vehicle yaw rate at different speeds
图27 不同路面参数下横摆角速度频率响应特性
Fig.27 Frequency response characteristics of vehicle yaw rate with different ground parameters
| [1] |
余志生. 汽车理论[M]. 北京: 机械工业出版社, 2006.
|
|
|
|
| [2] |
倪佑民. 汽车方向稳定性基本原理[M]. 北京: 清华大学出版社, 1978.
|
|
|
|
| [3] |
陆正煜, 伦景光, 倪佑民. 方向盘斜阶跃转角输入对汽车转向瞬态响应特性的影响[J]. 汽车工程, 1982(1):35-41.
|
|
|
|
| [4] |
陆正煜, 伦景光, 倪佑民. 汽车转向特性模拟计算的初步研究[J]. 汽车工程, 1982(2):39-53.
|
|
|
|
| [5] |
郭孔辉. 人-车-路闭环操纵系统主动安全性的综合评价与优化设计[J]. 汽车技术, 1993(4):4-12.
|
|
|
|
| [6] |
郭孔辉. 驾驶员-汽车闭环系统操纵运动的最优预瞄曲率模型[J]. 汽车工程, 1984(3):1-15, 16.
|
|
|
|
| [7] |
李亮, 朱宏军, 陈杰, 等. 用于汽车稳定性控制的路面附着识别算法[J]. 机械工程学报, 2014, 50(2):132-138.
|
|
|
|
| [8] |
王伟达, 张宇航, 黄国强, 等. 轮毂驱动电动车辆动力学稳定性滑模控制策略研究[J]. 动力学与控制学报, 2021, 19(3):5-14.
|
|
|
|
| [9] |
闫清东, 张连第, 赵毓芹, 等. 坦克构造与设计[M]. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [10] |
盖江涛, 黄守道, 周广明, 等. 双电机耦合驱动履带车辆自适应滑模转向控制[J]. 兵工学报, 2015, 36(3):405-411.
doi: 10.3969/j.issn.1000-1093.2015.03.004 |
|
|
|
| [11] |
邹渊, 孙逢春, 张承宁. 电传动履带车辆双侧驱动转速调节控制策略[J]. 北京理工大学学报, 2007, 27(4):303-307.
|
|
|
|
| [12] |
曾庆含, 马晓军, 廖自力, 等. 双侧电驱动履带车辆等效条件积分滑模稳定转向控制[J]. 兵工学报, 2016, 37(8):1351-1358.
doi: 10.3969/j.issn.1000-1093.2016.08.002 |
|
|
|
| [13] |
盖江涛, 刘春生, 马长军, 等. 考虑履带滑转滑移的电驱动车辆转向控制策略研究[J]. 兵工学报, 2021, 42(10):2092-2101.
doi: 10.3969/j.issn.1000-1093.2021.10.005 |
|
|
|
| [14] |
刘志强, 刘广. 分布式驱动电动汽车稳定性控制仿真与试验[J]. 汽车工程, 2019, 41(7):792-799.
|
|
|
|
| [15] |
袁小芳, 陈秋伊, 黄国明, 等. 基于FNN 的电动汽车自适应横向稳定性控制[J]. 湖南大学学报(自然科学版), 2019, 46(8):98-104.
|
|
|
|
| [16] |
陈无畏, 王晓, 谈东奎, 等. 基于最小能耗的电动汽车横摆稳定性灰色预测可拓控制研究[J]. 机械工程学报, 2019, 55(2):156-167.
doi: 10.3901/JME.2019.02.156 |
|
doi: 10.3901/JME.2019.02.156 |
|
| [17] |
张雷, 赵宪华, 王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J]. 汽车工程, 2020, 42(11):1513-1521.
doi: 10.19562/j.chinasae.qcgc.2020.11.009 |
|
|
|
| [18] |
高琪, 王春燕. 四轮驱动汽车转向状态下的横向稳定性控制研究[J]. 重庆理工大学学报(自然科学), 2019, 33(8):16-21.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
汪明德, 赵毓芹, 祝嘉光. 坦克行驶原理[M]. 北京: 国防工业出版社, 1983.
|
|
|
|
| [22] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16):162-172.
|
|
|
|
| [23] |
芮强, 王红岩, 王钦龙, 等. 履带车辆转向性能参数分析与试验研究[J]. 机械工程学报, 2015, 51(12):128-136.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
董景新, 赵长德, 熊沈蜀, 等. 控制工程基础[M]. 北京: 清华大学出版社, 2003.
|
|
|
| [1] | 袁艺, 盖江涛, 周广明, 高秀才, 李训明, 马长军. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213. |
| [2] | 王钦龙, 王红岩, 芮强. 基于多目标遗传算法的高速履带车辆动力学模型参数修正研究[J]. 兵工学报, 2016, 37(6): 969-978. |
| [3] | 李志农, 杜宜光, 肖尧先. 基于非线性输出频率响应函数的多裂纹转子故障诊断方法研究[J]. 兵工学报, 2015, 36(6): 1096-1103. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4