
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240292-.doi: 10.12382/bgxb.2024.0292
侯天乐1, 毕文豪1,2,*( ), 黄湛钧1,2, 李铭浩1, 张安1,2
), 黄湛钧1,2, 李铭浩1, 张安1,2
收稿日期:2024-04-16
上线日期:2025-04-30
通讯作者:
基金资助:
HOU Tianle1, BI Wenhao1,2,*(), HUANG Zhanjun1,2, LI Minghao1, ZHANG An1,2
Received:2024-04-16
Online:2025-04-30
摘要:
为解决编队控制存在的收敛速度慢、控制器连续更新问题,针对2阶多智能体系统,提出一种基于事件触发机制的预设时间编队控制方法。基于预设时间的加速度观测器,跟随者于预设时间内估计到领航者的加速度状态。设计基于事件触发机制的预设时间编队控制器使跟随者于预设时间内跟踪上领航者,避免了控制器的连续更新。基于严格的理论分析证明,多智能体系统可实现预设时间编队控制,且避免芝诺现象。数值仿真结果表明,新提出的基于事件触发的预设时间编队控制方法可使多智能体系统于指定时间内形成期望构型,同时降低控制器更新频率从而降低系统能耗。基于四旋翼无人机编队飞行试验结果,进一步验证了新提出的控制方法的可用性和拓展性。
中图分类号:
侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-.
HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems[J]. Acta Armamentarii, 2025, 46(4): 240292-.
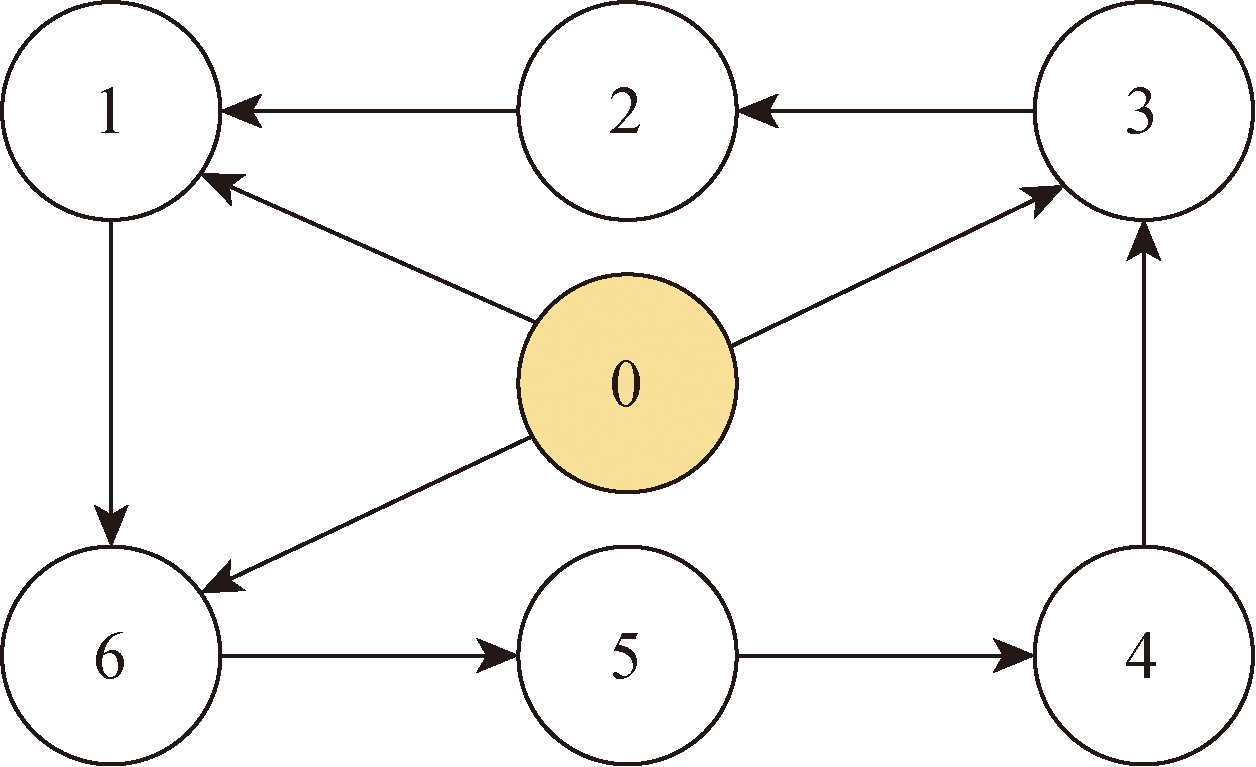
图1 算例1的通信拓扑(算例1)
Fig.1 Communication topology (Example 1)
| 智能体 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | -1 | 0 | |
| 1 | 10 | -1 | 0 |
| 2 | 2 | -2 | 0.5 |
| 3 | -10 | 3 | 0 |
| 4 | 5 | 1 | 1 |
| 5 | -3 | 2 | -1 |
| 6 | 3 | -3 | 0 |
表1 多智能体系统初始状态(算例1)
Table 1 The initial states of MASs (Example 1)
| 智能体 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | -1 | 0 | |
| 1 | 10 | -1 | 0 |
| 2 | 2 | -2 | 0.5 |
| 3 | -10 | 3 | 0 |
| 4 | 5 | 1 | 1 |
| 5 | -3 | 2 | -1 |
| 6 | 3 | -3 | 0 |
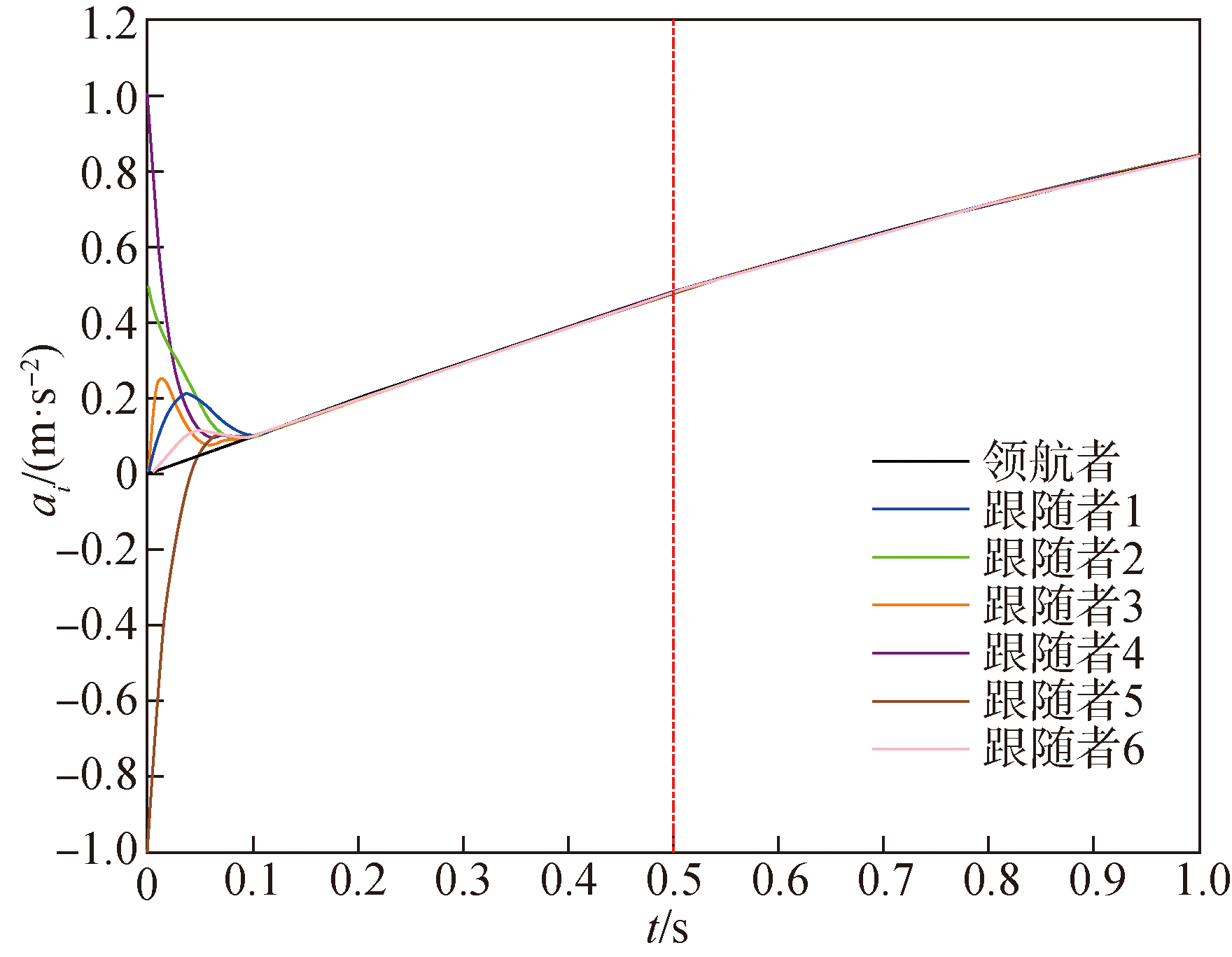
图2 智能体加速度估计量轨迹
Fig.2 Estimated acceleration trajectories of agents
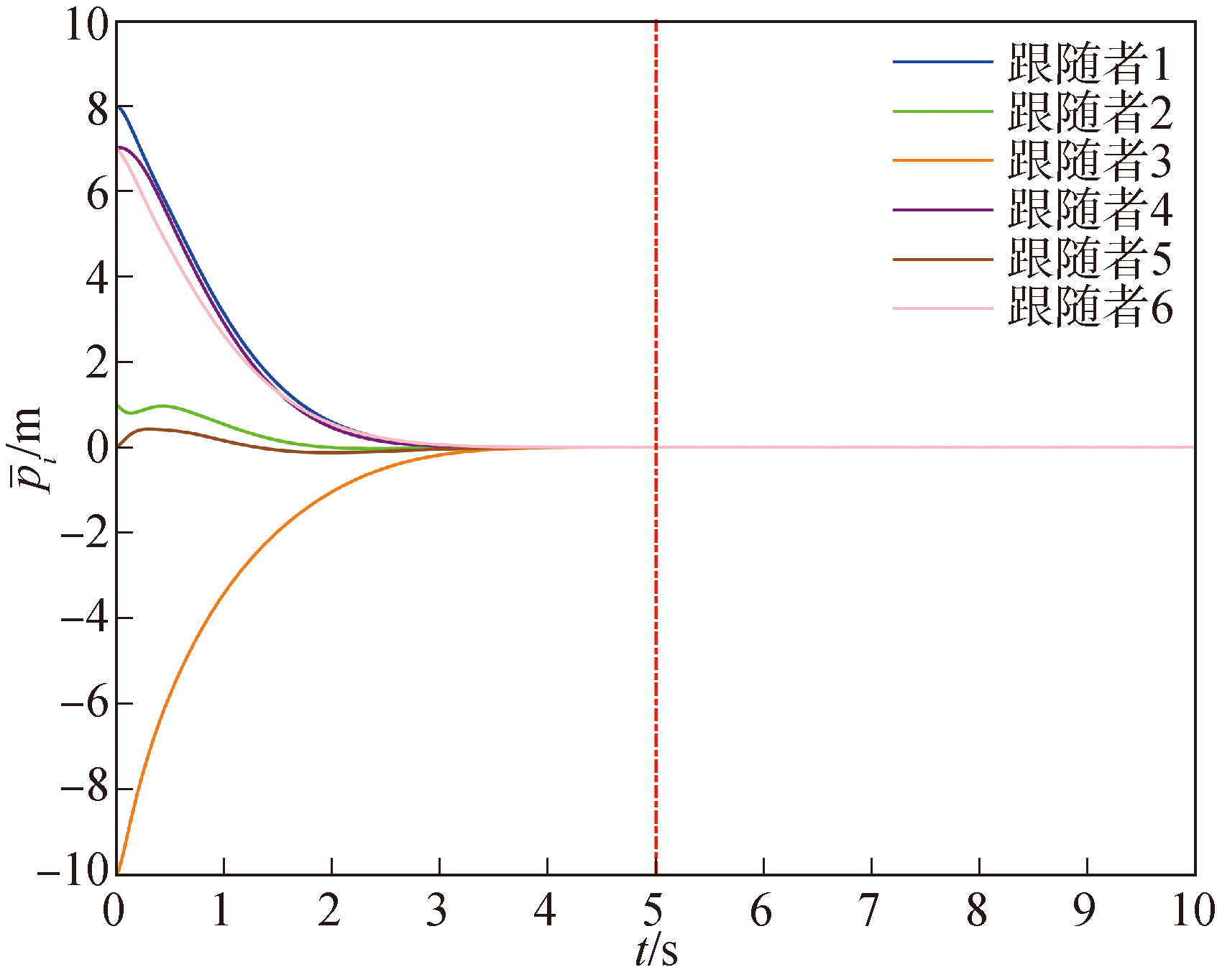
图3 跟随者位置跟踪误差轨迹
Fig.3 Position tracking error trajectories of followers
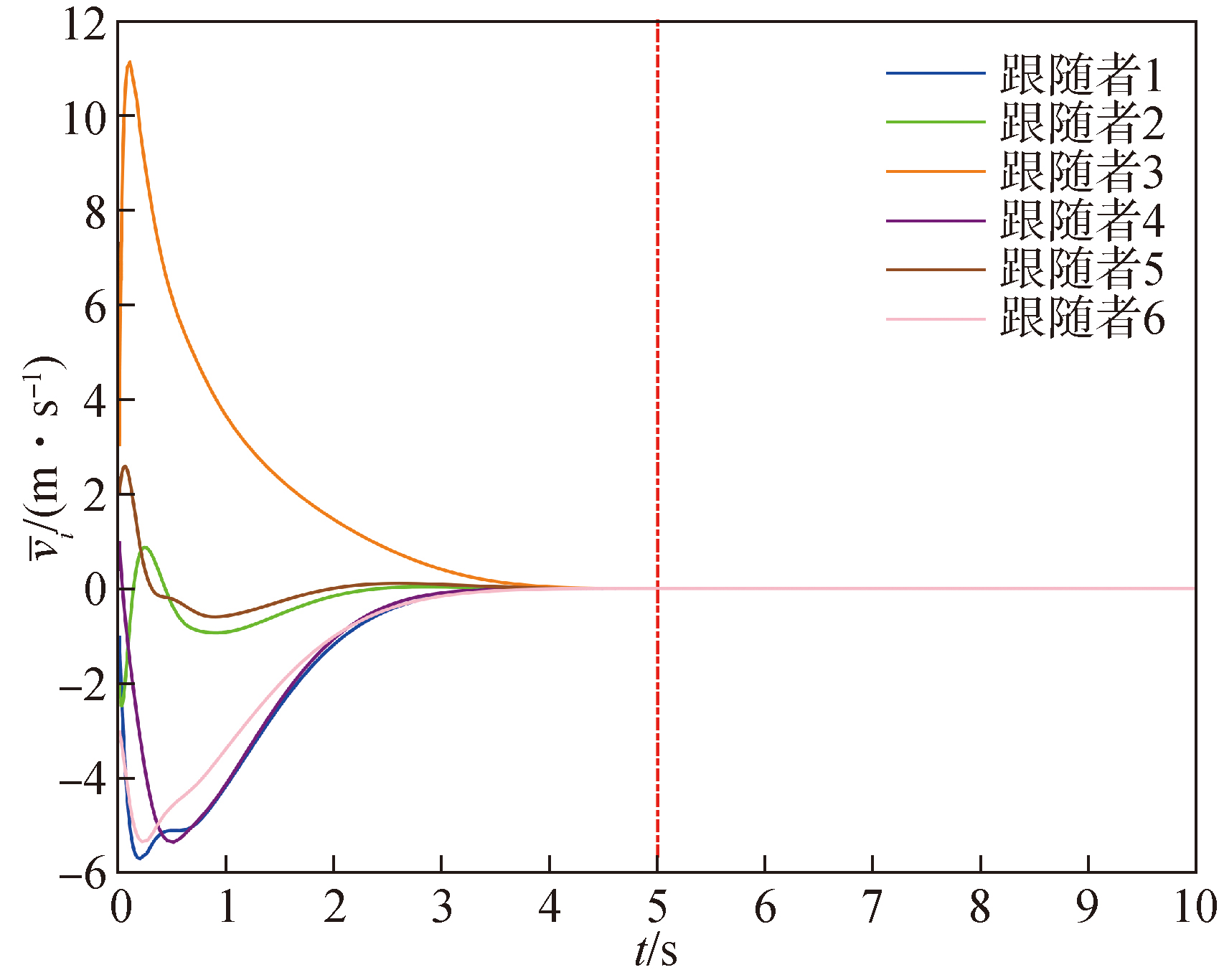
图4 跟随者速度跟踪误差轨迹
Fig.4 Velocity tracking error trajectories of followers
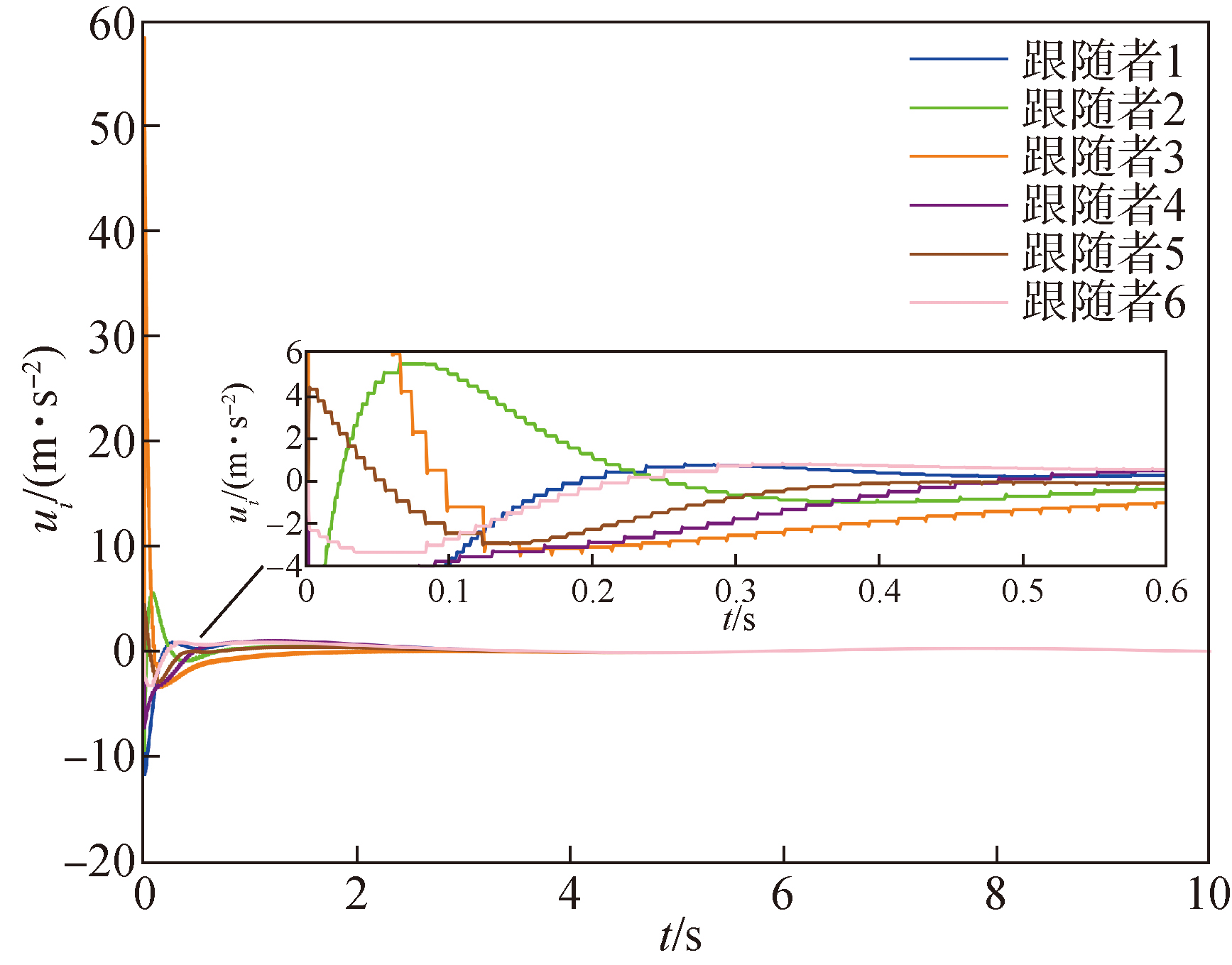
图5 跟随者控制输入轨迹
Fig.5 Control input trajectories of followers
| 类别 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 采用事件触发机制 | 999 | 853 | 843 | 964 | 860 | 970 |
| 未采用事件触发机制 | 5000 | |||||
表2 采用事件触发机制与未采用事件触 发机制控制器更新次数比较(算例1)
Table 2 Comparison of update frequencies of controller with and without event-triggering mechanism (Example 1)
| 类别 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 采用事件触发机制 | 999 | 853 | 843 | 964 | 860 | 970 |
| 未采用事件触发机制 | 5000 | |||||
| 算法 | 算法参数 |
|---|---|
| 文献[32]算法 | k1=1.2,k2=0.3,k3=0.5,k4=0.8,k5=3.5,k6=2,a=1,b=2,β=1.5,l1=0.1,l2=0.3,ρ=0.2 |
| 本文算法 | k1=1,δ=1,h1=2,α1=2,k2=30,k3=15,h2=5,α2=8,γ=5,T1=0.5 |
表3 算法参数(算例2)
Table 3 Algorithm parameters (Example 2)
| 算法 | 算法参数 |
|---|---|
| 文献[32]算法 | k1=1.2,k2=0.3,k3=0.5,k4=0.8,k5=3.5,k6=2,a=1,b=2,β=1.5,l1=0.1,l2=0.3,ρ=0.2 |
| 本文算法 | k1=1,δ=1,h1=2,α1=2,k2=30,k3=15,h2=5,α2=8,γ=5,T1=0.5 |

图6 总跟踪误差轨迹(算例2)
Fig.6 Total tracking error trajectories (Example 2)

图7 跟随者控制输入轨迹(算例2)
Fig.7 Control input trajectories of followers (Example 2)

图8 总跟踪误差轨迹(算例3)
Fig.8 Total tracking error trajectories (Example 3)
| 算法 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 本文算法 | 707 | 694 | 663 | 680 | 638 | 663 |
| 文献[24]算法 | 3000 | |||||
表4 采用事件触发机制与未采用事件触 发机制控制器更新次数比较(算例3)
Table 4 Comparison of update frequencies of controller with and without event-triggering mechanism (Example 3)
| 算法 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 本文算法 | 707 | 694 | 663 | 680 | 638 | 663 |
| 文献[24]算法 | 3000 | |||||

图9 试验平台示意图
Fig.9 Hardware platform
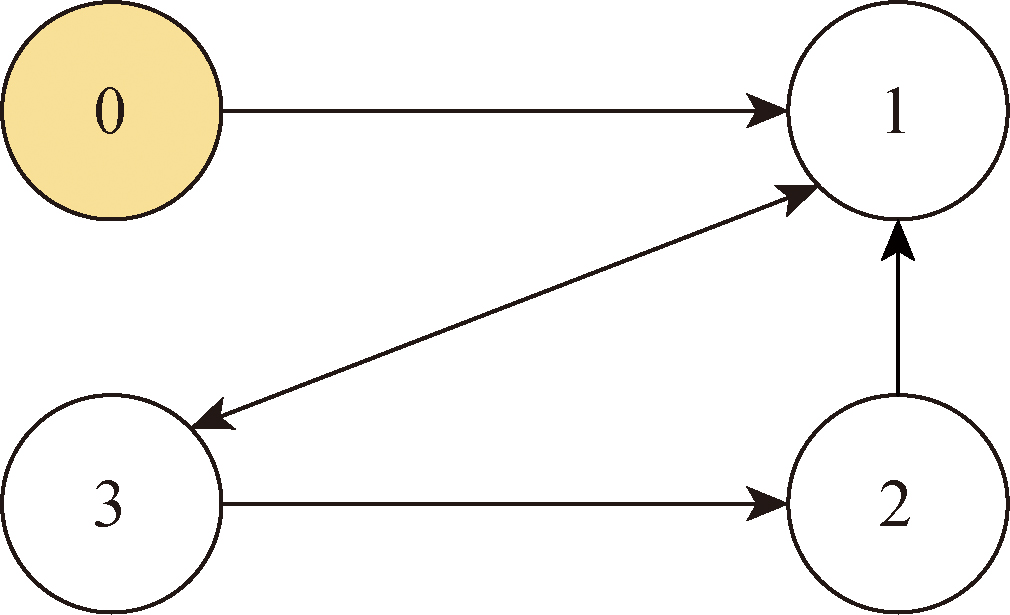
图10 四旋翼无人机编队通信拓扑
Fig.10 Communication topology of quadrotor UAVs
| 无人机 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | [0,1,0]T | [0,0,0]T | |
| 1 | [2.5,1,0]T | [0,0,0]T | [0,0,0]T |
| 2 | [2.5,-1.5,0]T | [0,0,0]T | [0,0,0]T |
| 3 | [0,-1.5,0]T | [0,0,0]T | [0,0,0]T |
表5 无人机初始位置与速度
Table 5 The initial position and velocity of UAVs
| 无人机 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | [0,1,0]T | [0,0,0]T | |
| 1 | [2.5,1,0]T | [0,0,0]T | [0,0,0]T |
| 2 | [2.5,-1.5,0]T | [0,0,0]T | [0,0,0]T |
| 3 | [0,-1.5,0]T | [0,0,0]T | [0,0,0]T |

图11 编队飞行示意图
Fig.11 formation flight
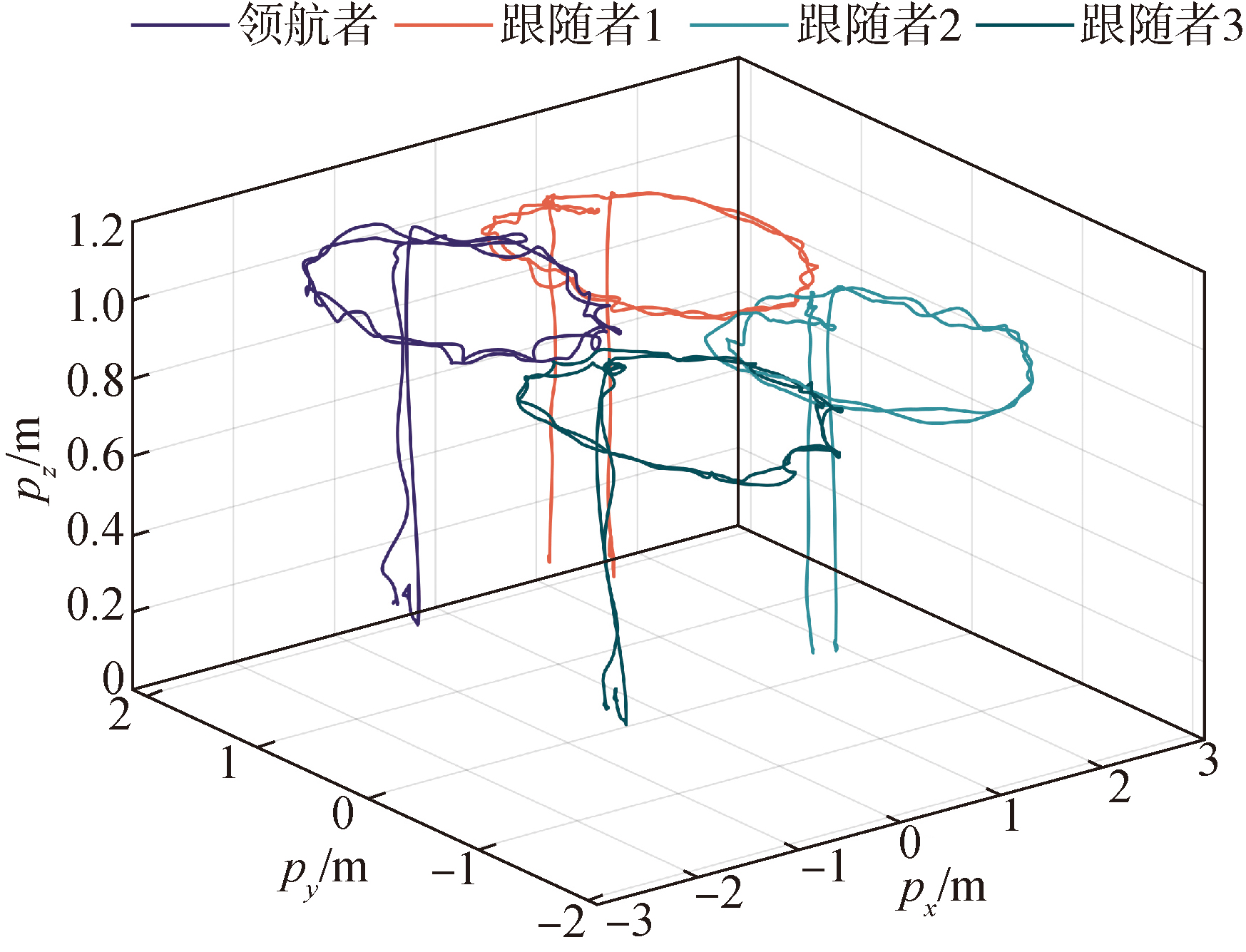
图12 飞行轨迹
Fig.12 Flight trajectories

图13 位置跟踪轨迹
Fig.13 Position tracking trajectories

图14 速度跟踪轨迹
Fig.14 Velocity tracking trajectories
| 跟随者无人机 | x轴方向 | y轴方向 | z轴方向 |
|---|---|---|---|
| 1 | 251 | 264 | 243 |
| 2 | 323 | 288 | 281 |
| 3 | 312 | 292 | 284 |
表6 事件触发机制下触发次数
Table 6 The triggering frequency with the event triggering mechanism
| 跟随者无人机 | x轴方向 | y轴方向 | z轴方向 |
|---|---|---|---|
| 1 | 251 | 264 | 243 |
| 2 | 323 | 288 | 281 |
| 3 | 312 | 292 | 284 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
王彤, 李磊, 蒋琪. “进攻性蜂群使能战术”项目推进无人蜂群能力发展分析[J]. 战术导弹技术, 2020(1):33-38.
|
|
|
|
| [8] |
陈士涛, 李大喜, 孙鹏, 等. 美军作战协同能力发展演进分析[J]. 中国电子科学研究院学报, 2021, 16(11):1113-1118.
|
|
|
|
| [9] |
孙佳琛, 王金龙, 陈瑾, 等. 群体智能协同通信:愿景、模型和关键技术[J]. 中国科学:信息科学, 2020, 50(3):307-317.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1002/asjc.1814 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
王晶, 顾维博, 窦立亚. 基于Leader-Follower的多无人机编队轨迹跟踪设计[J]. 航空学报, 2020, 41(增刊1):723758.
|
|
doi: 10.7527/S1000-6893.2019.23758 |
|
| [18] |
吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41(9):323848.
doi: 10.7527/S1000-6893.2020.23848 |
|
doi: 10.7527/S1000-6893.2020.23848 |
|
| [19] |
|
| [20] |
doi: 10.1109/TCYB.2013.2288980 pmid: 25137682 |
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
张继雄, 李宗刚, 宁小刚, 等. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(增刊2):223-234.
|
|
doi: 10.12382/bgxb.2023.0664 |
|
| [31] |
|
| [32] |
于镝, 王亚洁, 赵博, 等. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5):1403-1413.
|
|
doi: 10.12382/bgxb.2022.1267 |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [1] | 王浩凝, 郭杰, 万泱泱, 张宝超, 唐胜景, 李响. 考虑射向位置调节的高超声速滑翔飞行器编队控制方法[J]. 兵工学报, 2025, 46(4): 240410-. |
| [2] | 胡砚洋, 何凡, 白成超. 高超声速飞行器末制导段协同避障决策方法[J]. 兵工学报, 2024, 45(9): 3147-3160. |
| [3] | 梁苑, 戚国庆, 陈烨, 李银伢, 盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [4] | 周浩, 暴小鹏, 张洪刚. 无人机自抗扰控制的调相补偿改进设计与抑扰实现[J]. 兵工学报, 2024, 45(10): 3619-3630. |
| [5] | 贾一飞, 蒋朝阳. 动态可重构自适应无人车辆编队系统[J]. 兵工学报, 2024, 45(10): 3654-3673. |
| [6] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [7] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [8] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [9] | 张继雄, 李宗刚, 宁小刚, 陈引娟. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(S2): 223-234. |
| [10] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [11] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [12] | 于镝, 王亚洁, 赵博, 刘琼. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5): 1403-1413. |
| [13] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [14] | 修杨, 邓宏彬, 危怡然, 李东方. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938. |
| [15] | 朱毅飞, 林德福, 莫雳, 叶建川. 四旋翼无人机旋翼对机身非定常气动干扰特性[J]. 兵工学报, 2022, 43(2): 410-422. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4