
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240410-.doi: 10.12382/bgxb.2024.0410
王浩凝, 郭杰*( ), 万泱泱, 张宝超, 唐胜景, 李响
), 万泱泱, 张宝超, 唐胜景, 李响
收稿日期:2023-10-24
上线日期:2025-04-30
通讯作者:
基金资助:
WANG Haoning, GUO Jie*(), WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang
Received:2023-10-24
Online:2025-04-30
摘要:
由于高超声速滑翔飞行器无动力、轴向过载不可控的特点,高超声速滑翔飞行器编队机动飞行至滑翔段与末段的交班点时射向通常存在较大位置误差,对末段的协同打击精度造成显著影响。针对该问题,提出一种考虑射向位置调节的高超声速滑翔飞行器编队控制方法。面向二阶多智能体系统设计固定时间收敛一致性控制器。在此基础上设计欠驱动飞行器编队控制架构,围绕高超声速滑翔飞行器编队的欠驱动控制特征开展分析,设计射向调节策略,建立射向位置调节与附加侧向速度的关联;赋予飞行器编队射向调节能力的前提下建立三维人工势场,设计飞行器编队的避碰控制策略。理论分析和数值仿真表明,该方法可以支撑多个飞行器在编队散开、编队收缩、编队整体转向和高低编队飞行等场景中实现编队的形成与保持,在保证编队内部安全的前提下实现一致到达,为末段制导提供良好的交班条件。
中图分类号:
王浩凝, 郭杰, 万泱泱, 张宝超, 唐胜景, 李响. 考虑射向位置调节的高超声速滑翔飞行器编队控制方法[J]. 兵工学报, 2025, 46(4): 240410-.
WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction[J]. Acta Armamentarii, 2025, 46(4): 240410-.
图1 飞行器编队坐标系
Fig.1 Coordinate system for HGV formation
图2 欠驱动控制示意图
Fig.2 Diagram of underactuated control
图3 射向位置误差调节示意图
Fig.3 Diagram of position error adjustment in launch direction
图4 人工势场示意图
Fig.4 Diagram of artificial potential field

图5 欠驱动飞行器编队控制架构
Fig.5 Control architecture for underactuated HGV formation
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,30,0) | (0,30,0) | (0,30,0) | (0,30,0) |
| M2 | (0,30,0) | (5,30,0) | (5,30,0) | (5,31.5,0) |
| M3 | (0,30,0) | (-5,30,0) | (-5,30,0) | (-5,31.5,0) |
| M4 | (0,30,0) | (10,30,0) | (10,30,0) | (10,33,0) |
| M5 | (0,30,0) | (-10,30,0) | (-10,30,0) | (-10,33,0) |
表1 飞行器初始位置
Table 1 Initial positions of HGVs km
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,30,0) | (0,30,0) | (0,30,0) | (0,30,0) |
| M2 | (0,30,0) | (5,30,0) | (5,30,0) | (5,31.5,0) |
| M3 | (0,30,0) | (-5,30,0) | (-5,30,0) | (-5,31.5,0) |
| M4 | (0,30,0) | (10,30,0) | (10,30,0) | (10,33,0) |
| M5 | (0,30,0) | (-10,30,0) | (-10,30,0) | (-10,33,0) |
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,0,0) | (0,0,0) | (0,0,0) | (0,0,0) |
| M2 | (-5,0,0) | (-1.5,0,0) | (-5,0,0) | (-5,1.5,0) |
| M3 | (5,0,0) | (1.5,0,0) | (5,0,0) | (5,1.5,0) |
| M4 | (-10,0,0) | (-3,0,0) | (-10,0,0) | (-10,3,0) |
| M5 | (10,0,0) | (3,0,0) | (10,0,0) | (10,3,0) |
表2 飞行器编队期望队形
Table 2 Desired formation of HGVs km
| 飞行器 | 任务 | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| M1 | (0,0,0) | (0,0,0) | (0,0,0) | (0,0,0) |
| M2 | (-5,0,0) | (-1.5,0,0) | (-5,0,0) | (-5,1.5,0) |
| M3 | (5,0,0) | (1.5,0,0) | (5,0,0) | (5,1.5,0) |
| M4 | (-10,0,0) | (-3,0,0) | (-10,0,0) | (-10,3,0) |
| M5 | (10,0,0) | (3,0,0) | (10,0,0) | (10,3,0) |
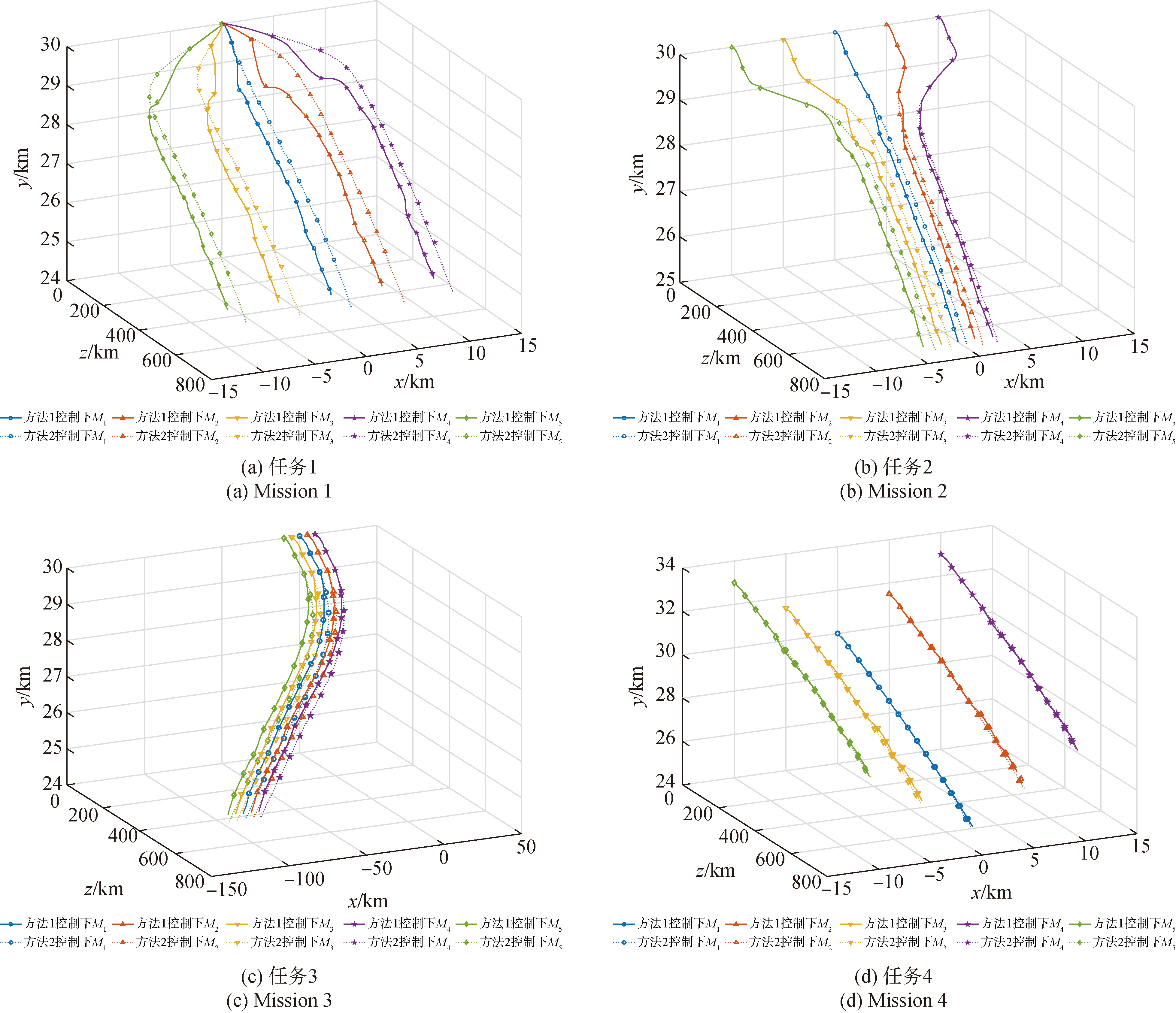
图6 各任务三维编队轨迹
Fig.6 3D formation trajectories for each mission

图7 各任务速度
Fig.7 Velocity curves for each mission
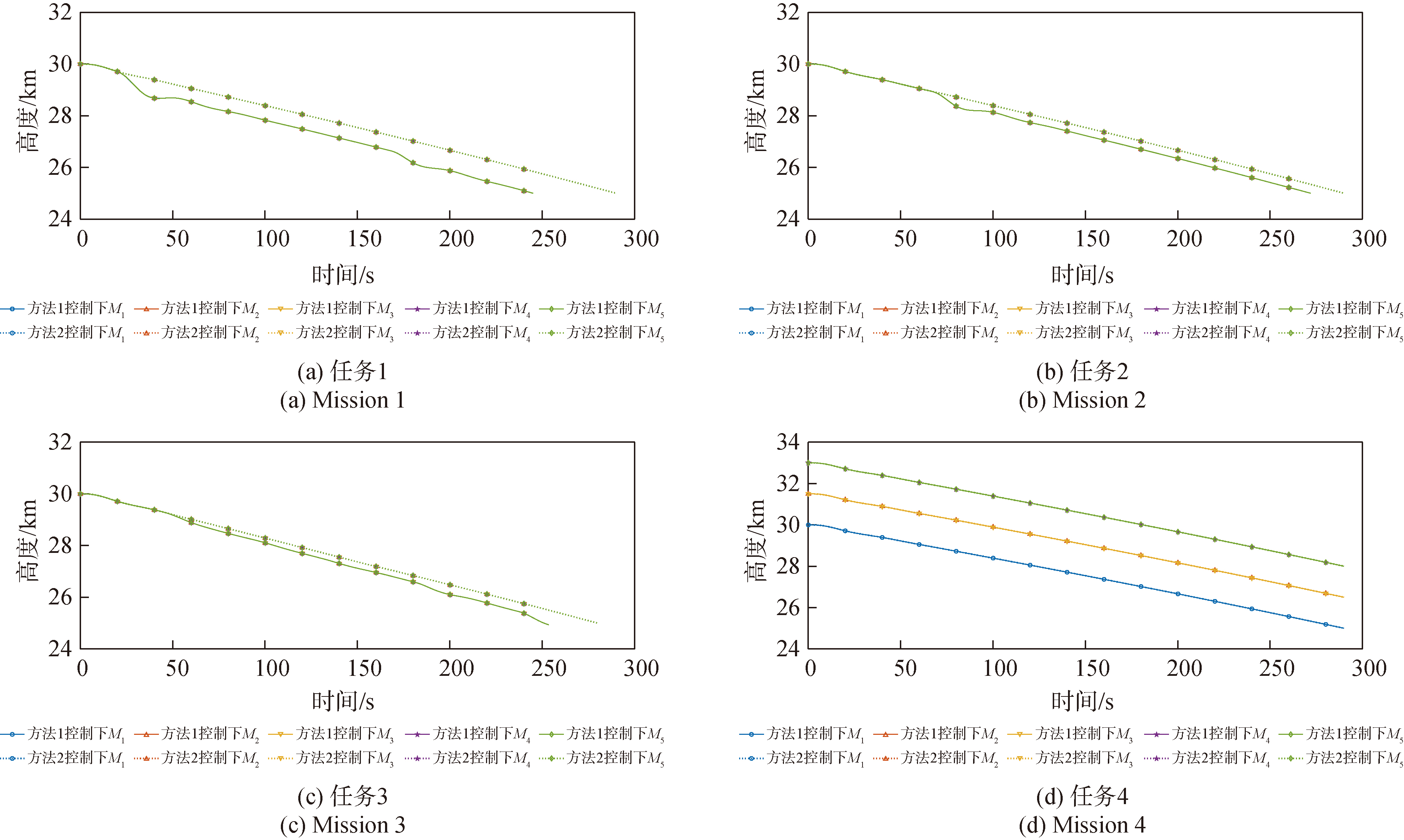
图8 各任务高度
Fig.8 Altitude curves for each mission

图9 各任务制导指令
Fig.9 Guidance command curves for each mission
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 4994.12 | 0.0021 | 198.90 | 5005.72 | 0.0022 | 4.70 | 5001.31 | 0.0003 | 518.23 | 4989.68 | 0.0005 | 186.78 |
| 2 | 1592.52 | 0.0067 | 854.82 | 1660.07 | 0.0046 | 579.22 | 1746.29 | 0.0051 | 208.56 | 1737.20 | 0.0001 | 23.46 |
| 3 | 4943.65 | 0.0110 | 728.30 | 5053.97 | 0.0011 | 172.14 | 4959.98 | 0.0011 | 116.22 | 5029.10 | 0.0135 | 491.62 |
| 4 | 5095.62 | 1500.01 | 862.75 | 4904.38 | 1500.01 | 862.75 | 4863.37 | 1500.01 | 54.89 | 5136.63 | 1500.01 | 54.89 |
表3 方法1终端编队间隔距离
Table 3 Terminal formation interval distance with position adjustment in Method 1
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 4994.12 | 0.0021 | 198.90 | 5005.72 | 0.0022 | 4.70 | 5001.31 | 0.0003 | 518.23 | 4989.68 | 0.0005 | 186.78 |
| 2 | 1592.52 | 0.0067 | 854.82 | 1660.07 | 0.0046 | 579.22 | 1746.29 | 0.0051 | 208.56 | 1737.20 | 0.0001 | 23.46 |
| 3 | 4943.65 | 0.0110 | 728.30 | 5053.97 | 0.0011 | 172.14 | 4959.98 | 0.0011 | 116.22 | 5029.10 | 0.0135 | 491.62 |
| 4 | 5095.62 | 1500.01 | 862.75 | 4904.38 | 1500.01 | 862.75 | 4863.37 | 1500.01 | 54.89 | 5136.63 | 1500.01 | 54.89 |
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 5000.00 | 0 | 4200.43 | 5000.00 | 0 | 5296.45 | 5000.00 | 0 | 12806.37 | 5000.00 | 0 | 13826.46 |
| 2 | 1500.01 | 0 | 1807.01 | 1500.01 | 0 | 2272.72 | 1500.01 | 0 | 5579.01 | 1500.01 | 0 | 6013.45 |
| 3 | 5000.50 | 0 | 1206.19 | 4999.61 | 0 | 1326.80 | 5000.06 | 0 | 1267.05 | 5000.06 | 0 | 1266.07 |
| 4 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 7067.40 | 5000.00 | 1500.00 | 7067.40 |
表4 方法2终端编队间隔距离
Table 4 Terminal formation interval distance without position adjustment in Method 2
| 任务 | M1与M2 | M1与M3 | M2与M4 | M3与M5 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | Δx/m | Δy/m | Δz/m | |
| 1 | 5000.00 | 0 | 4200.43 | 5000.00 | 0 | 5296.45 | 5000.00 | 0 | 12806.37 | 5000.00 | 0 | 13826.46 |
| 2 | 1500.01 | 0 | 1807.01 | 1500.01 | 0 | 2272.72 | 1500.01 | 0 | 5579.01 | 1500.01 | 0 | 6013.45 |
| 3 | 5000.50 | 0 | 1206.19 | 4999.61 | 0 | 1326.80 | 5000.06 | 0 | 1267.05 | 5000.06 | 0 | 1266.07 |
| 4 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 11047.87 | 5000.00 | 1500.00 | 7067.40 | 5000.00 | 1500.00 | 7067.40 |
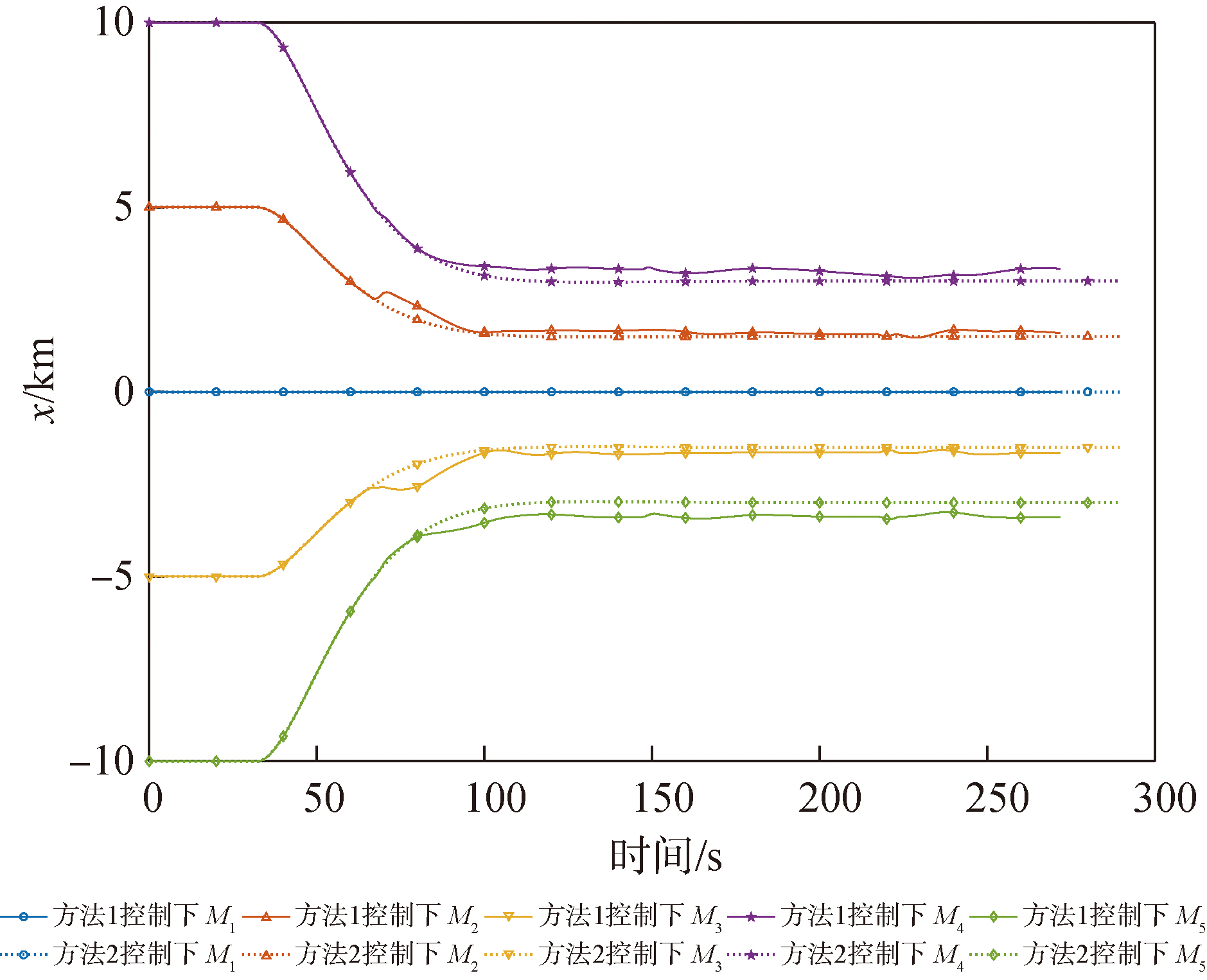
图10 任务2地面轨迹的射向调节对比
Fig.10 Comparison of launch direction adjustments in ground trajectories for Mission 2
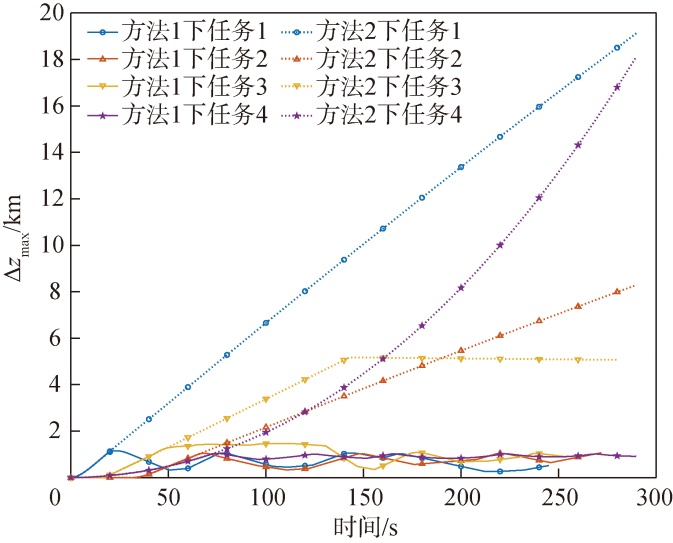
图11 各任务编队最大射向距离变化
Fig.11 Curves of maximum distance variation in launch direction for formations in each mission
| 方法 | 任务1 | 任务2 | 任务3 | 任务4 |
|---|---|---|---|---|
| 1 | 0.52 | 1.06 | 0.79 | 0.92 |
| 2 | 19.12 | 8.29 | 5.07 | 18.12 |
表5 各任务最大终端射向距离
Table 5 The maximum terminal distance in launch direction of each mission km
| 方法 | 任务1 | 任务2 | 任务3 | 任务4 |
|---|---|---|---|---|
| 1 | 0.52 | 1.06 | 0.79 | 0.92 |
| 2 | 19.12 | 8.29 | 5.07 | 18.12 |

图12 任务2地面轨迹的避碰控制对比
Fig.12 Comparison of collision avoidance controls in ground trajectories for Mission 2

图13 任务2编队最小空间距离
Fig.13 Minimum spatial distance of formation in Mission 2
| [1] |
赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展[J]. 宇航学报, 2020, 41(10):1239-1250.
|
|
|
|
| [2] |
郭杰, 郑金库, 王浩凝, 等. 高超声速滑翔飞行器再入制导方法及热点问题研究综述[J]. 空天技术, 2022(1):54-63.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(增刊1):171-183.
|
|
|
|
| [6] |
韩嘉俊, 王小虎, 郝昀, 等. 带有时间约束的再入滑翔轨迹设计[J]. 宇航学报, 2020, 41(4):438-446.
|
|
|
|
| [7] |
王培臣, 闫循良, 南汶江, 等. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7):2294-2305.
doi: 10.12382/bgxb.2023.0343 |
|
|
|
| [8] |
方科, 张庆振, 倪昆, 等. 飞行时间约束下的再入制导律[J]. 哈尔滨工业大学学报, 2019, 51(10):90-97.
|
|
|
|
| [9] |
王肖, 郭杰, 唐胜景, 等. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40(3):239-250.
|
|
|
|
| [10] |
|
| [11] |
张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7):1400-1411.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.007 |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
李文, 尚腾, 姚寅伟, 等. 速度时变情况下多飞行器时间协同制导方法研究[J]. 兵工学报, 2020, 41(6):1096-1110.
doi: 10.3969/j.issn.1000-1093.2020.06.006 |
|
doi: 10.3969/j.issn.1000-1093.2020.06.006 |
|
| [17] |
许强强. 高超声速多飞行器编队协同动力学研究[D]. 长沙: 国防科学技术大学, 2016.
|
|
|
|
| [18] |
水晓冰, 王晓芳, 林平, 等. 高超声速飞行器编队控制方法[J]. 战术导弹技术, 2020(5):139-148.
|
|
|
|
| [19] |
李兆亭. 高超声速滑翔导弹集群控制方法研究[D]. 长沙: 国防科技大学, 2018.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [1] | 潘云伟, 李敏, 曾祥光, 黄傲, 张加衡, 任文哲, 彭倍. 基于人工势场和改进强化学习的自主式水下潜航器避障和航迹规划[J]. 兵工学报, 2025, 46(4): 240300-. |
| [2] | 肖柳骏, 李雅轩, 刘新福. 基于强化学习的高超声速滑翔飞行器自适应末制导[J]. 兵工学报, 2025, 46(2): 240222-. |
| [3] | 姬鹏, 郭明皓. 基于Frenet坐标下改进人工势场法的无人车局部路径规划[J]. 兵工学报, 2024, 45(7): 2097-2109. |
| [4] | 张君彪, 熊家军, 兰旭辉, 李凡, 陈新, 席秋实. 基于自适应多通道交互式多模型的高超声速滑翔飞行器跟踪方法[J]. 兵工学报, 2021, 42(12): 2626-2636. |
| [5] | 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. |
| [6] | 潘无为, 姜大鹏, 庞永杰, 李岳明, 张强. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 326-334. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4