
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (3): 240421-.doi: 10.12382/bgxb.2024.0421
• • 上一篇
王一珉1, 袁树森2,*( ), 林大睿1, 杨国来1,**()
), 林大睿1, 杨国来1,**()
收稿日期:2024-05-29
上线日期:2025-03-26
通讯作者:
基金资助:
WANG Yimin1, YUAN Shusen2,*(), LIN Darui1, YANG Guolai1,**()
Received:2024-05-29
Online:2025-03-26
摘要:
传统坦克双向稳定系统的控制策略难以有效处理新一代全电双向稳定系统中的耦合性、非线性和不确定性,而基于模型的非线性控制能够充分利用系统动态模型的先验信息提升控制效果。因此,建立计及执行器动态的全电双向稳定系统机电耦合动力学模型,提出一种基于神经网络补偿的非线性滑模控制方法。引入滑模面和基于双曲正切函数改进的滑模鲁棒控制律设计非线性滑模控制函数,以有效地消除系统振荡,提高系统的稳态性能。同时,深度融合多层神经网络,准确估计系统的不确定性并进行前馈补偿,避免高增益反馈。基于Lyapunov理论严格证明了新控制策略可以实现连续控制输入下坦克全电双向稳定系统的渐近稳定性能。搭建了联合仿真环境与半实物实验平台,通过大量对比实验验证了新控制策略的优越性。
中图分类号:
王一珉, 袁树森, 林大睿, 杨国来. 基于神经网络补偿的坦克全电双向稳定系统非线性滑模控制[J]. 兵工学报, 2025, 46(3): 240421-.
WANG Yimin, YUAN Shusen, LIN Darui, YANG Guolai. Nonlinear Sliding Mode Control Based on Neural Network Compensation for Tank All-electric Bidirectional Stabilizers[J]. Acta Armamentarii, 2025, 46(3): 240421-.
图1 坦克全电双向稳定系统
Fig.1 Tank all-electric bidirectional stabilizer
图2 垂直向运动几何关系
Fig.2 Geometry of vertical motion
图3 FOC控制原理
Fig.3 Principle of FOC control

图4 本文前馈神经网络结构
Fig.4 Structure of the feedforward neural network

图5 函数y=tanh(x/ξ)与y=sgn(x)对比
Fig.5 Comparison of functions y=tanh(x/ξ) and y=sgn(x)

图6 控制系统原理
Fig.6 Schematic diagram of control system
图7 坦克拓扑关系
Fig.7 Topological relation of tank

图8 坦克的多体动力学模型
Fig.8 Multibody dynamics model of the tank

图9 E级路面的三维路面谱
Fig.9 3D spectrum of E-level pavement
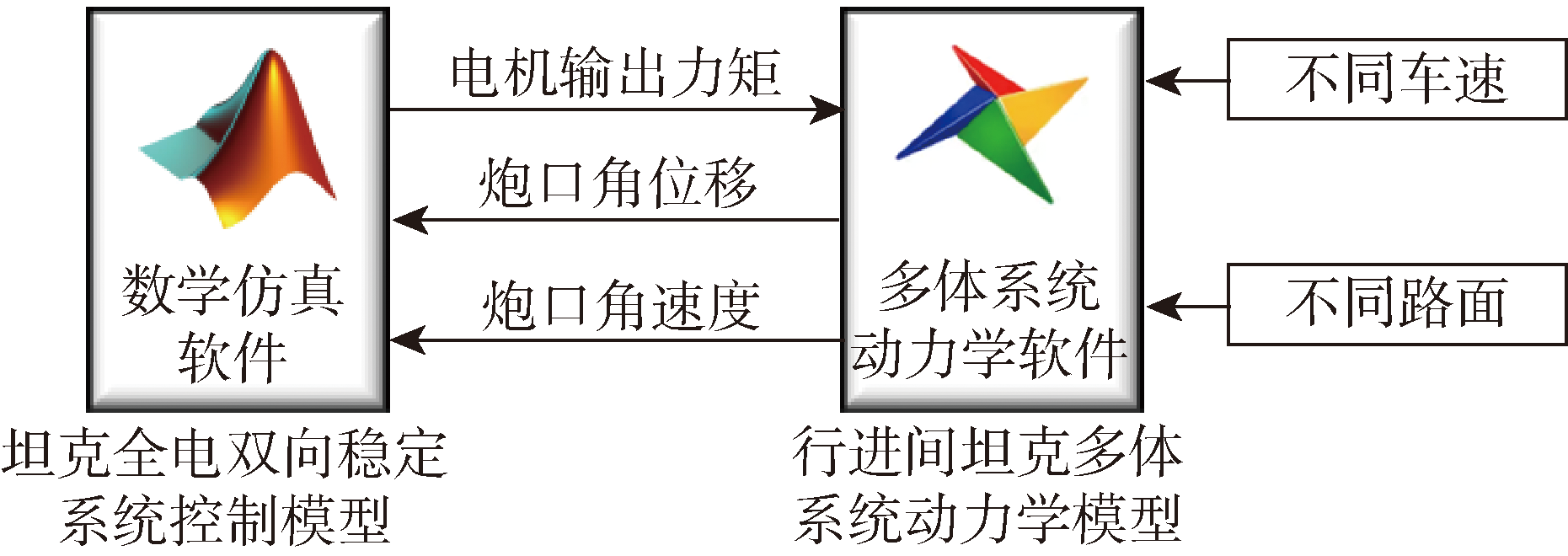
图10 软件交互实现原理
Fig.10 The principle of software interaction
| 参数 | 数值 |
|---|---|
| 水平向旋转体旋转半径h1/m | 0.20 |
| 垂直向旋转体旋转半径h2/m | 0.12 |
| 水平向旋转体总质量m1/kg | 5200.0 |
| 垂直向旋转体总质量m2/kg | 2088.0 |
| 电动缸上支点至耳轴中心距离d1/m | 0.44 |
| 电动缸下支点至耳轴中心距离d2/m | 0.30 |
| 零度射角下电动缸长度d/m | 0.40 |
| 零度射角下电动缸安装角度α0/rad | 1.07 |
| 炮塔电机力矩系数k1/(N·m·A-1) | 1.89 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 1.54 |
| 水平向传动系数N1 | 400 |
| 垂直向传动系数N2 | 5 |
| 垂直向传动效率η | 0.98 |
| 重力加速度g/(m·s-2) | 9.80 |
| 路面参考空间频率n0/m-1 | 0.1 |
| 路面频率指数w | 2 |
表1 联合仿真环境中的主要物理参数
Table 1 Major physical parameters for co-simulation
| 参数 | 数值 |
|---|---|
| 水平向旋转体旋转半径h1/m | 0.20 |
| 垂直向旋转体旋转半径h2/m | 0.12 |
| 水平向旋转体总质量m1/kg | 5200.0 |
| 垂直向旋转体总质量m2/kg | 2088.0 |
| 电动缸上支点至耳轴中心距离d1/m | 0.44 |
| 电动缸下支点至耳轴中心距离d2/m | 0.30 |
| 零度射角下电动缸长度d/m | 0.40 |
| 零度射角下电动缸安装角度α0/rad | 1.07 |
| 炮塔电机力矩系数k1/(N·m·A-1) | 1.89 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 1.54 |
| 水平向传动系数N1 | 400 |
| 垂直向传动系数N2 | 5 |
| 垂直向传动效率η | 0.98 |
| 重力加速度g/(m·s-2) | 9.80 |
| 路面参考空间频率n0/m-1 | 0.1 |
| 路面频率指数w | 2 |

图11 联合仿真中炮口水平向角位移对比
Fig.11 Comparison of horizontal angular displacements of muzzle in co-simulation
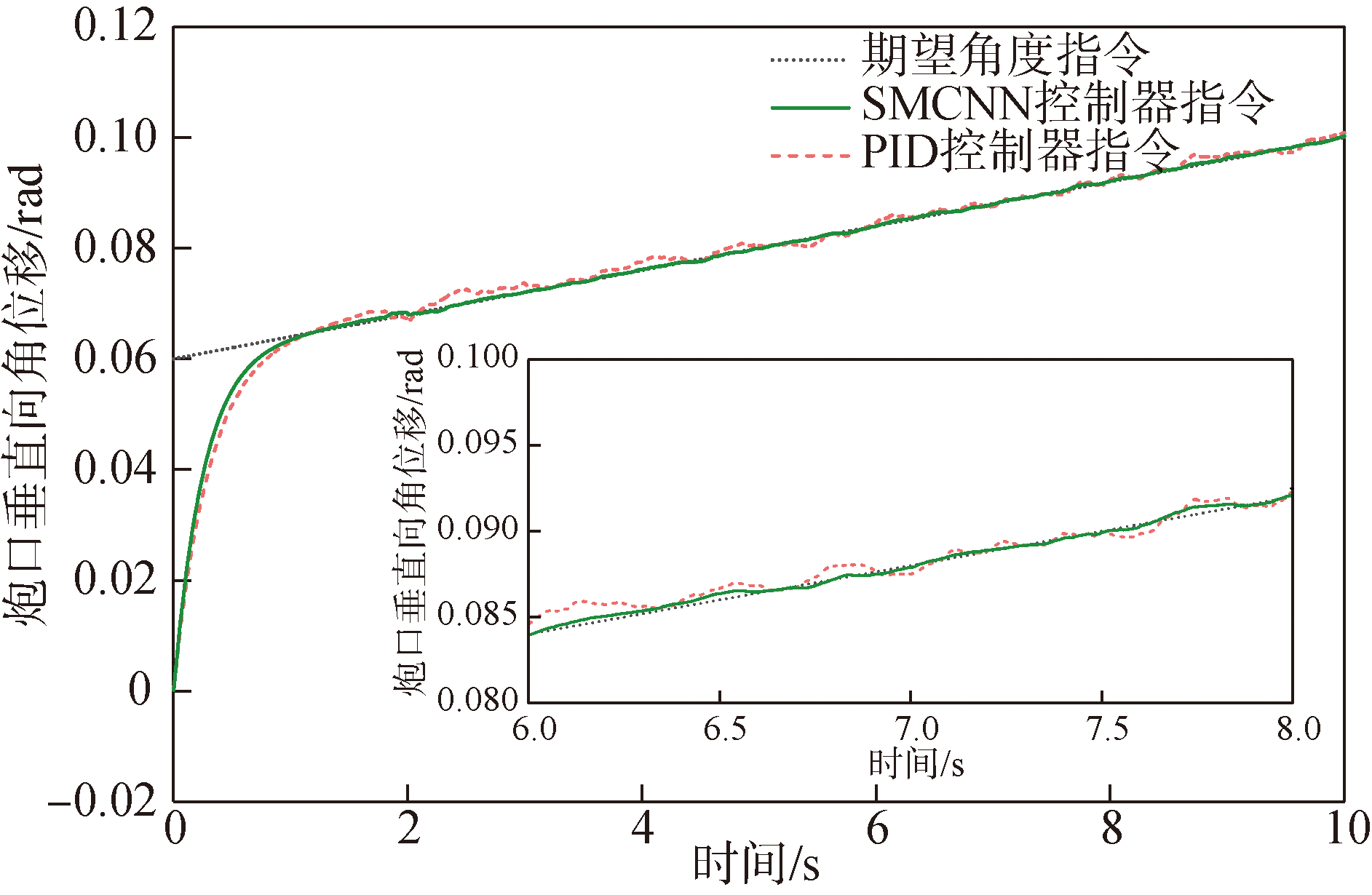
图12 联合仿真中炮口垂直向角位移对比
Fig.12 Comparison of vertical angular displacements of muzzle in co-simulation
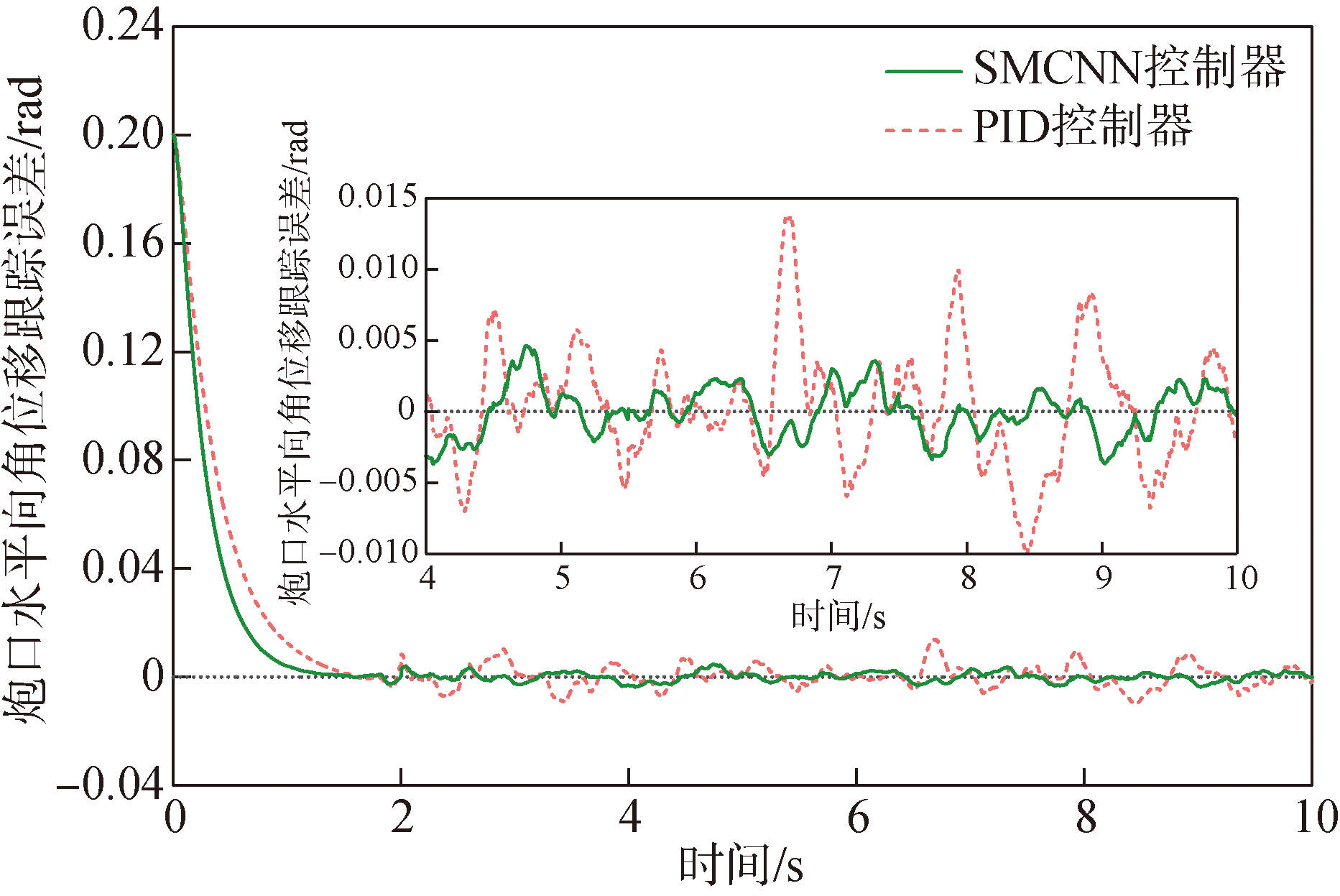
图13 联合仿真中炮口水平向角位移跟踪误差对比
Fig.13 Comparison of horizontal angular displacement errors of muzzle in co-simulation

图14 联合仿真中炮口垂直向角位移跟踪误差对比
Fig.14 Comparison of vertical angular displacement errors of muzzle in co-simulation

图15 联合仿真中炮塔电机控制电流对比
Fig.15 Comparison of turret motor control currents in co-simulation

图16 联合仿真中电动缸电机控制电流对比
Fig.16 Comparison of electric cylinder motor control currents in co-simulation

图17 坦克火炮垂直向稳定系统半实物平台
Fig.17 Semi-physical platform of tank gun vertical stabilizer
| 参数 | 数值 |
|---|---|
| 垂直向旋转体旋转半径h2/m | 0.06 |
| 垂直向旋转体总质量m2/kg | 71.01 |
| 电动缸上支点至耳轴中心距离d1/m | 0.194 |
| 电动缸下支点至耳轴中心距离d2/m | 0.170 |
| 零度射角下电动缸长度d/m | 0.094 |
| 零度射角下电动缸安装角度α0/rad | 0.51 |
| 垂直向传动系数N2 | 36 |
| 垂直向传动效率η | 0.98 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 0.195 |
| 重力加速度g/(m·s-2) | 9.80 |
表2 实验中的主要物理参数
Table 2 Major physical parameters for experiment
| 参数 | 数值 |
|---|---|
| 垂直向旋转体旋转半径h2/m | 0.06 |
| 垂直向旋转体总质量m2/kg | 71.01 |
| 电动缸上支点至耳轴中心距离d1/m | 0.194 |
| 电动缸下支点至耳轴中心距离d2/m | 0.170 |
| 零度射角下电动缸长度d/m | 0.094 |
| 零度射角下电动缸安装角度α0/rad | 0.51 |
| 垂直向传动系数N2 | 36 |
| 垂直向传动效率η | 0.98 |
| 电动缸电机力矩系数k2/(N·m·A-1) | 0.195 |
| 重力加速度g/(m·s-2) | 9.80 |

图18 跟踪实验结果
Fig.18 Tracking experimental result
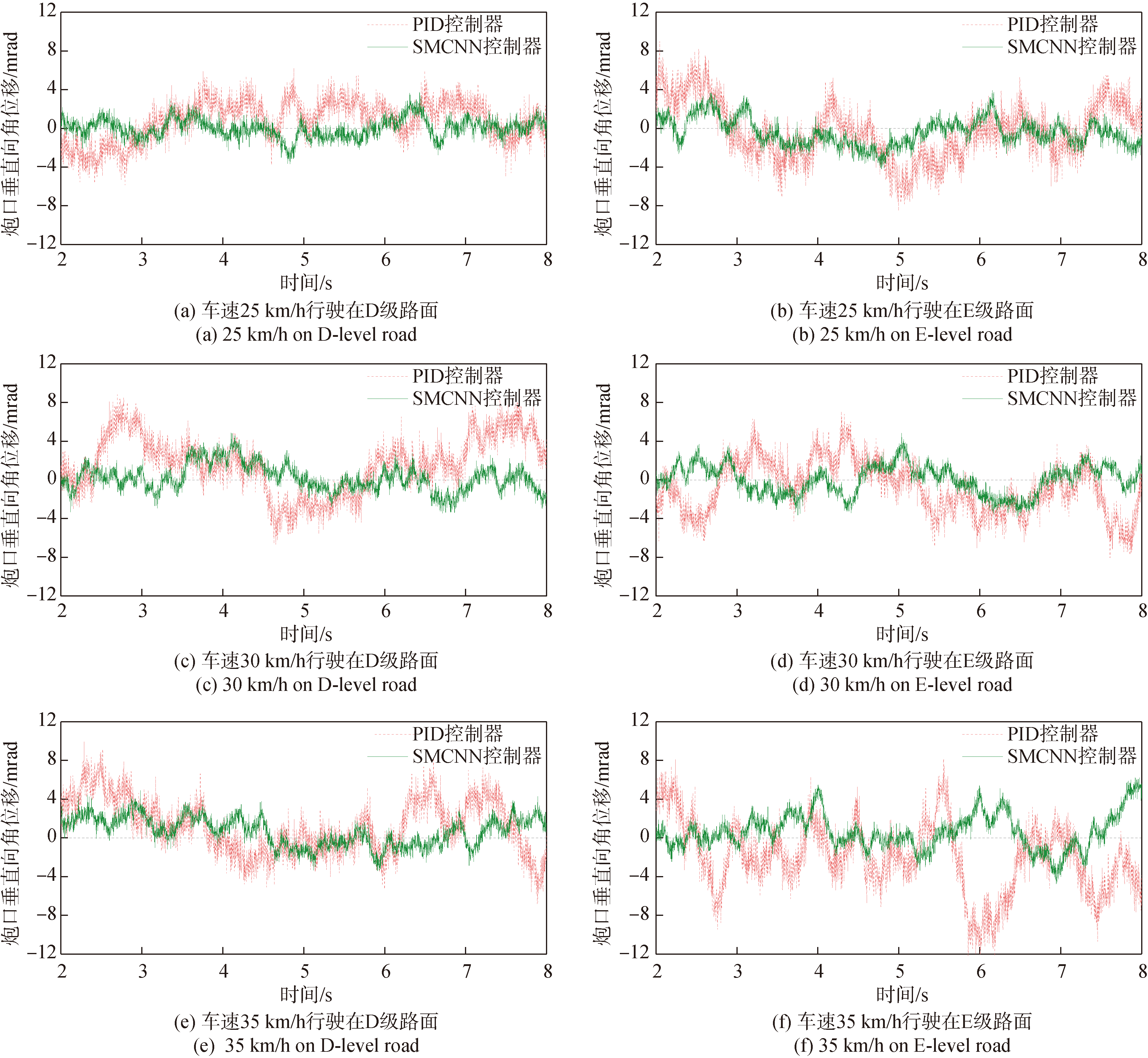
图19 抗干扰实验结果
Fig.19 Anti-interference experimental results
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 1.919 | 2.844 | 2.511 |
| SMCNN控制器/mrad | 0.942 | 1.296 | 1.618 |
| 降低百分比/% | 50.91 | 54.43 | 35.56 |
表3 D级路面下稳定精度
Table 3 Stabilization accuracy on D-level road
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 1.919 | 2.844 | 2.511 |
| SMCNN控制器/mrad | 0.942 | 1.296 | 1.618 |
| 降低百分比/% | 50.91 | 54.43 | 35.56 |
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 2.403 | 2.344 | 3.282 |
| SMCNN控制器/mrad | 1.429 | 1.465 | 2.232 |
| 降低百分比/ % | 40.53 | 37.50 | 31.99 |
表4 E级路面下稳定精度
Table 4 Stabilization accuracy on E-level road
| 控制器及降低百分比 | 车速/(km·h-1) | ||
|---|---|---|---|
| 25 | 30 | 35 | |
| PID控制器/mrad | 2.403 | 2.344 | 3.282 |
| SMCNN控制器/mrad | 1.429 | 1.465 | 2.232 |
| 降低百分比/ % | 40.53 | 37.50 | 31.99 |
| [1] |
|
| [2] |
|
| [3] |
李长兵, 袁东, 马晓军, 等. 高速机动条件下坦克火炮系统扰动力矩谱研究[J]. 兵工学报, 2015, 36(4):582-589.
doi: 10.3969/j.issn.1000-1093.2015.04.002 |
|
|
|
| [4] |
|
| [5] |
陈宇. 坦克行进间发射动力学分析及优化研究[D]. 南京: 南京理工大学, 2019.
|
|
|
|
| [6] |
陈宇, 杨国来, 付羽翀, 等. 高速机动条件下坦克行进间火炮非线性振动动力学研究[J]. 兵工学报, 2019, 40(7):1339-1348.
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.002 |
|
| [7] |
|
| [8] |
王宗范, 杨国来. 计及不等式约束的坦克炮稳定系统约束跟随控制[J]. 南京理工大学学报, 2023, 47(4):461-467.
|
|
|
|
| [9] |
吕从鑫, 汪波, 陈静波, 等. 永磁同步电机控制策略综述与展望[J]. 电气传动自动化, 2022, 44(4):1-10.
|
|
|
|
| [10] |
马晓军, 袁东, 臧克茂, 等. 数字全电式坦克炮控系统研究现状与发展[J]. 兵工学报, 2012, 33(1):69-76.
|
|
|
|
| [11] |
孙国轩, 宫新宇, 时岩, 等. 基于差分进化算法的自行高炮随动系统PID参数整定[J]. 兵工学报, 2021, 42(5):903-912.
doi: 10.3969/j.issn.1000-1093.2021.05.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.05.002 |
|
| [12] |
|
| [13] |
邱晓波, 窦丽华, 韩京清, 等. 自抗扰控制在坦克机动目标状态估计中的应用[J]. 兵工学报, 2009, 30(7):989-993.
|
|
|
|
| [14] |
|
| [15] |
代普, 潘军, 马晴, 等. 火炮俯仰电液伺服系统速度非线性抑制技术研究[J]. 兵工学报, 2022, 43(6):1246-1254.
doi: 10.12382/bgxb.2021.0357 |
|
doi: 10.12382/bgxb.2021.0357 |
|
| [16] |
|
| [17] |
高强, 侯润民, 杨国来, 等. 基于分数阶神经滑模的某顶置火炮调炮控制[J]. 兵工学报, 2013, 34(10):1311-1317.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 018 |
|
|
|
| [18] |
曾子健, 杨国来, 龙义强, 等. 基于自适应鲁棒控制的坦克俯仰系统建模与仿真[J]. 弹道学报, 2022, 34(2):41-46.
doi: 10.12115/j.issn.1004-499X(2022)02-006 |
|
doi: 10.12115/j.issn.1004-499X(2022)02-006 |
|
| [19] |
谢润. 车载武器行进间发射动力学研究[D]. 南京: 南京理工大学, 2015.
|
|
|
|
| [20] |
王经纬, 侯远龙, 高强, 等. 炮控系统电动负载模拟器神经网络滑模控制[J]. 兵工自动化, 2019, 38(4):62-65.
|
|
|
|
| [21] |
潘公宇. 汽车振动学基础及其应用[M]. 北京: 北京大学出版社, 2013:105-108.
|
|
|
|
| [22] |
袁树森, 邓文翔, 姚建勇, 等. 全电坦克双向稳定系统自适应积分鲁棒控制[J]. 兵工学报, 2023, 44(1):140-155.
doi: 10.12382/bgxb.2022.0107 |
|
doi: 10.12382/bgxb.2022.0107 |
| [1] | 宁建国, 汪齐, 栗建桥. 基于人工神经网络的三棱柱定向装药结构破片初速预测模型[J]. 兵工学报, 2025, 46(3): 240346-. |
| [2] | 李英顺, 于昂, 李茂, 贺喆, 刘师铭. 基于KLDA-IDBO-BP的装甲车发动机故障诊断[J]. 兵工学报, 2025, 46(3): 240083-. |
| [3] | 苏政宇, 杨宝生, 杨婧, 唐静楠, 姜毅, 邓月光. 基于卷积神经网络与支持向量机的适配器落点预测方法[J]. 兵工学报, 2025, 46(2): 240016-. |
| [4] | 万张博, 胡建刚, 李俊杰, 陈励, 毛余琨, 叶梦雅. 基于图卷积的陆域智能化无人作战体系效能评估[J]. 兵工学报, 2024, 45(S1): 271-277. |
| [5] | 刘锟龙, 王虎, 刘小强, 牛帅旭, 黄奕, 付琦, 赵涛. 基于光照感知和特征增强的可见光-热红外图像语义分割[J]. 兵工学报, 2024, 45(S1): 219-230. |
| [6] | 王烨茹, 杨耿, 刘述, 许啸, 陈华杰, 秦飞巍, 徐华杰. 基于图神经网络的车辆目标遮蔽关重部位检测[J]. 兵工学报, 2024, 45(S1): 242-251. |
| [7] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [8] | 夏焕雄, 李康, 高丰, 刘检华, 敖晓辉. 基于凝固前沿演变特征的熔铸装药成型工艺参数智能优化[J]. 兵工学报, 2024, 45(9): 2936-2950. |
| [9] | 杜甫, 董明明, 汪浒江, 赵艳辉, 郑凤杰. 基于准零刚度的坦克装甲车辆半主动惯容悬架控制策略[J]. 兵工学报, 2024, 45(9): 2929-2935. |
| [10] | 原红伟, 李豪杰, 戴可人, 陈荷娟, 张合. 基于哈里斯鹰优化算法的引信装定系统参数优化方法[J]. 兵工学报, 2024, 45(8): 2594-2606. |
| [11] | 庞辉, 王明祥, 王磊, 郑理哲. 基于事件触发的汽车主动悬架振动控制器设计[J]. 兵工学报, 2024, 45(8): 2698-2711. |
| [12] | 郭爱强, 李天鹏, 朱曦, 管智超, 李门, 董弘玙, 高欣宝. 基于卷积神经网络和时空特征的烟幕视频检测和参数提取[J]. 兵工学报, 2024, 45(8): 2478-2486. |
| [13] | 林瑜斌, 侯保林, 鲍丹, 赵伟. 基于隐式Lyapunov函数的弹药传输机械臂变增益超螺旋滑模控制[J]. 兵工学报, 2024, 45(8): 2573-2583. |
| [14] | 岳文斌, 宁功韬, 倪永亮, 宋克岭, 黄煜, 王志远, 李艳明. 坦克装甲车辆电力系统源网荷储协同优化与安全控制:架构设计及前沿思考[J]. 兵工学报, 2024, 45(8): 2463-2477. |
| [15] | 刘亚丽, 鲁妍池, 马勋举, 宋遒志. 基于卷积神经网络的肌电信号人体运动模式识别技术[J]. 兵工学报, 2024, 45(7): 2144-2158. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4