
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (8): 2698-2711.doi: 10.12382/bgxb.2023.0590
庞辉*( ), 王明祥, 王磊, 郑理哲
), 王明祥, 王磊, 郑理哲
收稿日期:2023-06-19
上线日期:2023-10-19
通讯作者:
基金资助:
PANG Hui*(), WANG Mingxiang, WANG Lei, ZHENG Lizhe
Received:2023-06-19
Online:2023-10-19
摘要:
为提升车辆的行驶平稳性和安全性,针对具有输入死区和饱和特性的汽车主动悬架系统,设计一种基于事件触发(Event Trigger, ET)和长短期记忆(Long Short-Term Memory, LSTM)神经网络的智能振动控制器。在构建四分之一车辆主动悬架模型基础上,提出一种高效的ET控制器,能够有效缓解通信紧张问题和避免控制器固有的芝诺现象,提高控制器的稳定性和可靠性。为了进一步增强控制器的智能性和自适应性引入了LSTM神经网络,利用径向基函数神经网络来模拟和生成不同条件下的响应数据实现LSTM神经网络的训练,以精确预测并补偿作动器的死区和饱和影响,进而使主动悬架系统的垂直加速度趋近于0m/s2,从而极大地提升了乘坐舒适性。通过数值仿真验证所设计控制器的适用性和有效性。研究结果表明,所设计的控制器在多种工况下能够有效提高主动悬架系统的动态性能。
中图分类号:
庞辉, 王明祥, 王磊, 郑理哲. 基于事件触发的汽车主动悬架振动控制器设计[J]. 兵工学报, 2024, 45(8): 2698-2711.
PANG Hui, WANG Mingxiang, WANG Lei, ZHENG Lizhe. Design of Event Trigger-based Vibration Control for Active Suspension System[J]. Acta Armamentarii, 2024, 45(8): 2698-2711.

图1 主动悬架动力学模型
Fig.1 Active suspension system dynamic model
| 参数 | 数值 |
|---|---|
| ms/kg | 492 |
| mu/kg | 40 |
| ks/(N·m-1) | 46021 |
| kt/(N·m-1) | 238145 |
| c/(N·s·m-1) | 2040 |
表1 主动悬架系统参数
Table 1 Parameter values of active suspension model
| 参数 | 数值 |
|---|---|
| ms/kg | 492 |
| mu/kg | 40 |
| ks/(N·m-1) | 46021 |
| kt/(N·m-1) | 238145 |
| c/(N·s·m-1) | 2040 |

图2 死区和饱和特性
Fig.2 Input dead zone and saturation characteristics
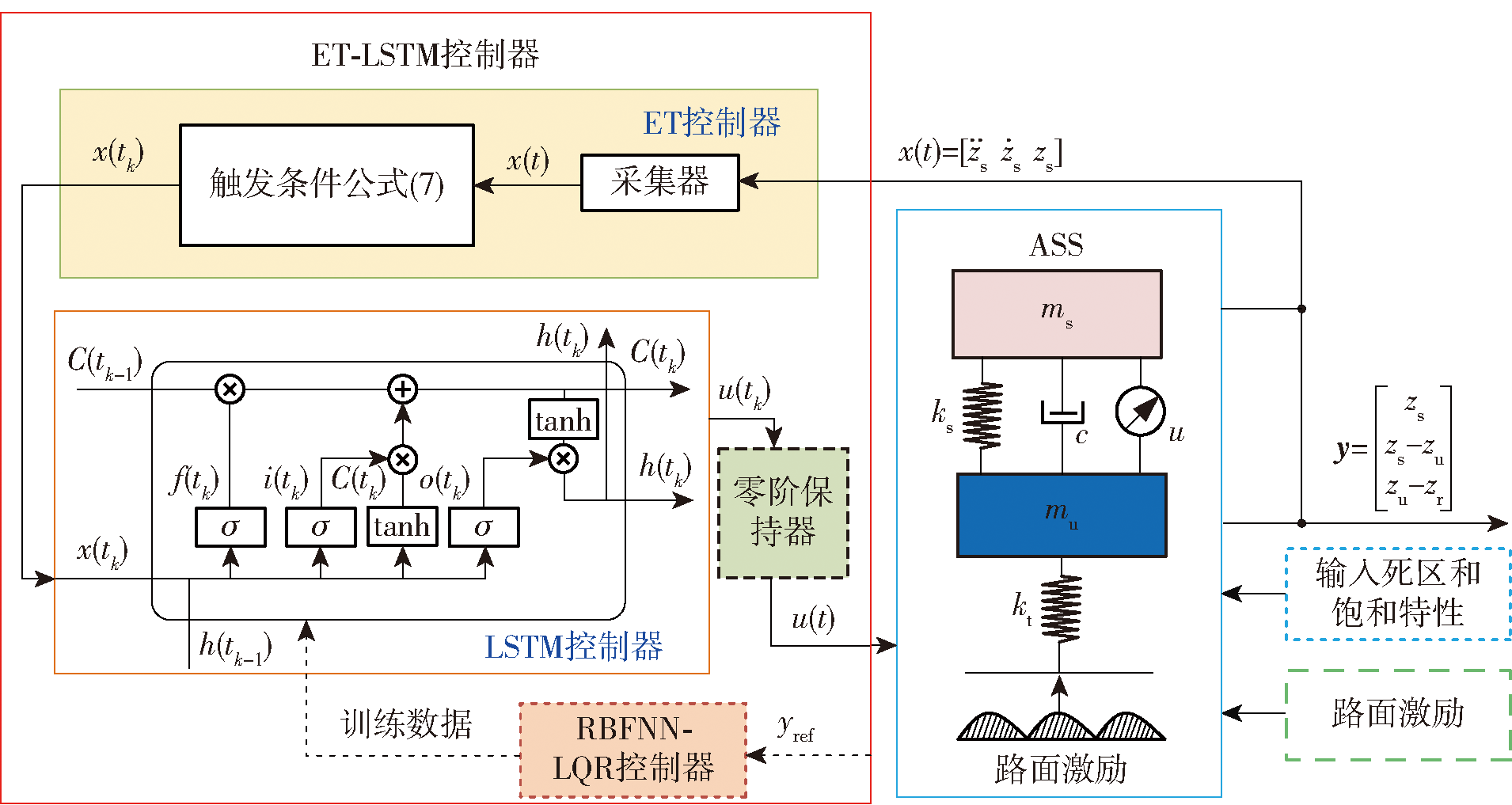
图3 悬架系统控制流程
Fig.3 Suspension system control scheme

图4 长短期记忆神经网络结构图
Fig.4 LSTM neural network structure

图5 径向基函数神经网络结构图
Fig.5 The structure of RBFNN

图6 LSTM控制器构建流程
Fig.6 Construction process of LSTM controller

图7 预测结果对比
Fig.7 Comparison of predicted results
| 符号 | 数值 | 符号 | 数值 |
|---|---|---|---|
| q1 | 7.792×104 | nin, nim,nout | 3,5,1 |
| q2 | 9.1831×104 | Igc | 0.05 |
| q3 | 9.6057×104 | nlstm, nFcln | 200,50 |
| rlBP | 0.2 | rlLSTM | 0.01 |
| Nmax | 200 | Ggt | 1 |
| Nmin | 20 | rAR | 0.5 |
表2 主动悬架系统仿真所需参数
Table 2 Parameter values of active suspension model
| 符号 | 数值 | 符号 | 数值 |
|---|---|---|---|
| q1 | 7.792×104 | nin, nim,nout | 3,5,1 |
| q2 | 9.1831×104 | Igc | 0.05 |
| q3 | 9.6057×104 | nlstm, nFcln | 200,50 |
| rlBP | 0.2 | rlLSTM | 0.01 |
| Nmax | 200 | Ggt | 1 |
| Nmin | 20 | rAR | 0.5 |

图8 凸块路面下主动悬架系统响应对比
Fig.8 Response curves of suspension system on bump road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.3827 | 0.002340 | 243.9 |
| ET-BPNN | 0.3637 | 0.001871 | 225.6 |
| ET-LSTM | 0.3060 | 0.001821 | 207.3 |
表3 凸块路面下主动悬架性能指标RMS对比
Table 3 Comparison of RMSs of active suspension performance on bump road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.3827 | 0.002340 | 243.9 |
| ET-BPNN | 0.3637 | 0.001871 | 225.6 |
| ET-LSTM | 0.3060 | 0.001821 | 207.3 |

图9 控制器输出
Fig.9 The output of controller

图10 ET控制器触发间隔
Fig.10 Release instants of ET controller

图11 随机路面下悬架系统响应对比
Fig.11 Response curves of suspension system on random road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.938 | 0.01092 | 567.1 |
| ET-BPNN | 0.791 | 0.008958 | 399.1 |
| ET-LSTM | 0.494 | 0.008127 | 263.7 |
表4 随机路面下主动悬架性能指标RMS对比
Table 4 Comparison of RMSs of active suspension performance on random road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.938 | 0.01092 | 567.1 |
| ET-BPNN | 0.791 | 0.008958 | 399.1 |
| ET-LSTM | 0.494 | 0.008127 | 263.7 |

图12 控制器输出
Fig.12 The output of controller

图13 ET控制器触发间隔
Fig.13 Release instants of ET controller

图14 速度为5m/s随机路面下悬架系统响应对比
Fig.14 Response curves of suspension system on random road at a speed of 5m/s

图15 速度为10m/s随机路面下悬架系统响应对比曲线
Fig.15 Response curves of suspension system on random road at a speed of 10m/s

图16 速度为15m/s随机路面下悬架系统响应对比曲线
Fig.16 Response curves of suspension system on random road at a speed of 15m/s
| 车速/ (m·s-1) | 控制 算法 | RMS( ) | RMS (yu) | RMS (F) |
|---|---|---|---|---|
| Passive | 0.469 | 0.005458 | 233.5 | |
| 5 | ET-BPNN | 0.4354 (↓7.16%) | 0.004479 (↓17.9%) | 220.9 (↓5.4%) |
| ET-LSTM | 0.3955 (↓15.67%) | 0.003478 (↓36.28%) | 199.5 (↓14.56%) | |
| Passive | 0.6633 | 0.007716 | 330.3 | |
| 10 | ET-BPNN | 0.6157 (↓7.17%) | 0.006334 (↓17.9%) | 312.5 (↓5.4%) |
| ET-LSTM | 0.5593 (↓15.68%) | 0.004919 (↓36.25%) | 282.2 (↓14.56%) | |
| Passive | 0.8124 | 0.009453 | 402.5 | |
| 15 | ET-BPNN | 0.7641 (↓5.9%) | 0.007758 (↓17.93%) | 382.7 (↓4.92%) |
| ET-LSTM | 0.685 (↓15.68%) | 0.006024 (↓36.27%) | 345.6 (↓14.14%) |
表5 不同速度随机路面下主动悬架性能指标RMS对比
Table 5 Comparison of RMSs of active suspension performance on random road at different speeds
| 车速/ (m·s-1) | 控制 算法 | RMS( ) | RMS (yu) | RMS (F) |
|---|---|---|---|---|
| Passive | 0.469 | 0.005458 | 233.5 | |
| 5 | ET-BPNN | 0.4354 (↓7.16%) | 0.004479 (↓17.9%) | 220.9 (↓5.4%) |
| ET-LSTM | 0.3955 (↓15.67%) | 0.003478 (↓36.28%) | 199.5 (↓14.56%) | |
| Passive | 0.6633 | 0.007716 | 330.3 | |
| 10 | ET-BPNN | 0.6157 (↓7.17%) | 0.006334 (↓17.9%) | 312.5 (↓5.4%) |
| ET-LSTM | 0.5593 (↓15.68%) | 0.004919 (↓36.25%) | 282.2 (↓14.56%) | |
| Passive | 0.8124 | 0.009453 | 402.5 | |
| 15 | ET-BPNN | 0.7641 (↓5.9%) | 0.007758 (↓17.93%) | 382.7 (↓4.92%) |
| ET-LSTM | 0.685 (↓15.68%) | 0.006024 (↓36.27%) | 345.6 (↓14.14%) |
| [1] |
马硕, 李永明, 伊曙东. 汽车主动悬架系统的控制方法综述[J]. 控制工程, 2024, 31(4):695-702.
|
|
|
|
| [2] |
曹青松, 许力, 易星. 轮毂电机驱动的电动汽车主动悬架构型与控制[J]. 机械设计, 2020, 37(10): 85-92.
doi: 10.13841/j.cnki.jxsj.2020.10.012 |
|
|
|
| [3] |
殷珺, 罗建南, 喻凡. 汽车电磁式主动悬架技术综述[J]. 机械设计与研究, 2020, 36(1): 161-168.
|
|
|
|
| [4] |
|
| [5] |
李金辉, 张柯柯, 徐立友. 重型汽车主动悬架次优控制策略设计与分析[J]. 振动与冲击, 2020, 39(13): 141-147.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
李韶华, 张培强, 杨建森. 轮毂电机驱动电动汽车主动悬架T-S变论域模糊控制研究[J]. 振动与冲击, 2022, 41(24): 201-209.
|
|
|
|
| [10] |
张云, 孙劭泽, 金贤建, 等. 轮毂式电机驱动电动汽车主动悬架滑模控制研究[J]. 动力学与控制学报, 2021, 19(3): 89-94.
|
|
|
|
| [11] |
秦武, 朱钢, 上官文斌, 等. 具有扰动观测器的汽车主动悬架滑模控制[J]. 振动工程学报, 2020, 33(1): 158-167.
|
|
|
|
| [12] |
李娜. 基于模糊神经网络的二自由度主动悬架滑模控制系统设计[J]. 计算机测量与控制, 2021, 29(9): 101-104, 120.
|
|
|
|
| [13] |
|
| [14] |
吕科, 杨正才, 赵宝. 递归对角神经网络算法在汽车主动悬架控制系统中的研究[J]. 燕山大学学报, 2017, 41(1): 27-31.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
刘秋, 孙晋伟, 张华, 等. 基于卷积神经网络的路面识别及半主动悬架控制[J]. 兵工学报, 2020, 41(8): 1483-1493.
doi: 10.3969/j.issn.1000-1093.2020.08.002 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.002 |
|
| [18] |
寇发荣, 胡凯仑, 陈若晨, 等. 基于ResNeSt网络路面状态识别的主动悬架模型预测控制[J]. 控制与决策, 2024, 39(6): 1849-1858.
|
|
|
|
| [19] |
梁冠群, 赵通, 王岩, 等. 基于LSTM网络的路面不平度辨识方法[J]. 汽车工程, 2021, 43(4): 509-517, 628.
|
|
|
|
| [20] |
|
| [21] |
范利蓉, 王芳, 周超, 等. 状态时延和全状态约束下的多智能体系统自适应事件触发控制[J]. 控制与决策, 2022, 37(4): 892-902.
|
|
|
|
| [22] |
张栋, 马苏慧, 吕石, 等. 多智能体系统事件触发一致性研究综述[J]. 北京理工大学学报, 2022, 42(10): 1059-1072.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
庞辉, 王延, 刘凡. 考虑参数不确定性的主动悬架H2/H∞保性能控制[J]. 控制与决策, 2019, 34(3): 470-478.
|
|
|
|
| [30] |
|
| [31] |
陈浩浩, 樊渊. 基于动态事件触发机制的线性系统最优控制[J]. 控制工程, 2020, 27(10): 1820-1827.
|
|
|
|
| [32] |
|
| [33] |
|
| [1] | 严松, 姜毅, 邓月光, 文享华. 泡沫铝填充薄壁金属圆管吸能特性的预测及优化方法[J]. 兵工学报, 2024, 45(6): 1954-1964. |
| [2] | 梁苑, 戚国庆, 陈烨, 李银伢, 盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [3] | 张继雄, 李宗刚, 宁小刚, 陈引娟. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(S2): 223-234. |
| [4] | 闵博旭, 高剑, 井安言, 陈依民, 王佳润, 潘光. 基于事件触发的水下滑翔机自适应容错俯仰控制[J]. 兵工学报, 2023, 44(7): 2092-2100. |
| [5] | 于镝, 王亚洁, 赵博, 刘琼. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5): 1403-1413. |
| [6] | 任济寰, 吴祥, 薄煜明, 吴盘龙, 何山. 基于增强上下文信息长短期记忆网络的弹道轨迹预测[J]. 兵工学报, 2023, 44(2): 462-471. |
| [7] | 杨春伟, 刘炳琪, 王继平, 邵节, 韩治国. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(S2): 78-86. |
| [8] | 于哲峰, 胥建宇, 罗跃, 杨鹰, 刘进博, 兰京川. 高超声速飞行器烧蚀后退量时序提取及基于神经网络的预测[J]. 兵工学报, 2021, 42(6): 1230-1237. |
| [9] | 李彬, 庞永杰, 朱枭猛, 程妍雪. 水下航行器环肋复合材料耐压壳6σ优化设计[J]. 兵工学报, 2018, 39(6): 1171-1177. |
| [10] | 陈烨, 盛安冬, 戚国庆, 李银伢. 不完全量测下事件触发卡尔曼一致滤波及在光电探测网中的应用[J]. 兵工学报, 2018, 39(4): 625-634. |
| [11] | 梁苑, 盛安冬, 武兆斌, 张蛟, 戚国庆, 李银伢. 事件触发容积卡尔曼滤波及其在火控探测网络中的应用[J]. 兵工学报, 2018, 39(3): 417-427. |
| [12] | 蒋清山, 钱林方, 徐亚栋, 邹权. 考虑区间不确定性的某弹丸提升装置参数优化[J]. 兵工学报, 2015, 36(6): 1117-1122. |
| [13] | 赵捍东, 李志鹏. 基于径向基函数神经网络和无迹卡尔曼滤波的弹丸落点预报方法研究[J]. 兵工学报, 2014, 35(7): 965-971. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4