
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (5): 1384-1401.doi: 10.12382/bgxb.2022.1070
吴锐, 于会龙*( ), 董昊天, 席军强**()
), 董昊天, 席军强**()
收稿日期:2022-11-18
上线日期:2023-07-03
通讯作者:
基金资助:
WU Rui, YU Huilong*(), DONG Haotian, XI Junqiang**()
Received:2022-11-18
Online:2023-07-03
摘要:
履带车辆动力学模型是车辆结构优化设计与控制算法开发、测试与标定的基础。基于商业软件所搭建模型的动力学方程及梯度信息对用户未知,极大地限制了结构参数与控制参数的优化效率。此外,现有商业软件求解效率低、实时性差,影响了控制算法开发进度。针对上述问题,基于多体动力学推导建立可同时满足纵横垂耦合运动仿真需求的履带车辆精细化动力学模型并进行仿真。建立考虑空间三维耦合运动的车体动力学模型以及精细到履带板的履带链动力学模型。通过计算履带板与各部件相互作用力,将车体模型、履带链模型以及地面相关联,最终构建190自由度的履带车辆动力学模型。在加速、刹车与转向等工况下与ATV(ADAMS Tracked Vehicle Toolkit)进行对比,结果表明自主开发的仿真模型纵横垂向运动仿真结果与商业软件高度一致,验证了新方法的准确性。
中图分类号:
吴锐, 于会龙, 董昊天, 席军强. 履带式特种车辆精细化动力学建模与仿真[J]. 兵工学报, 2024, 45(5): 1384-1401.
WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles[J]. Acta Armamentarii, 2024, 45(5): 1384-1401.
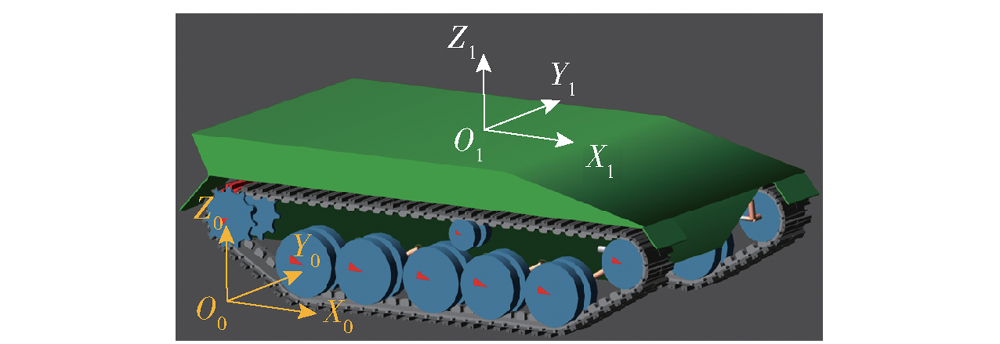
图1 履带车辆模型示意图
Fig.1 Diagrammatic sketch of tracked vehicle model
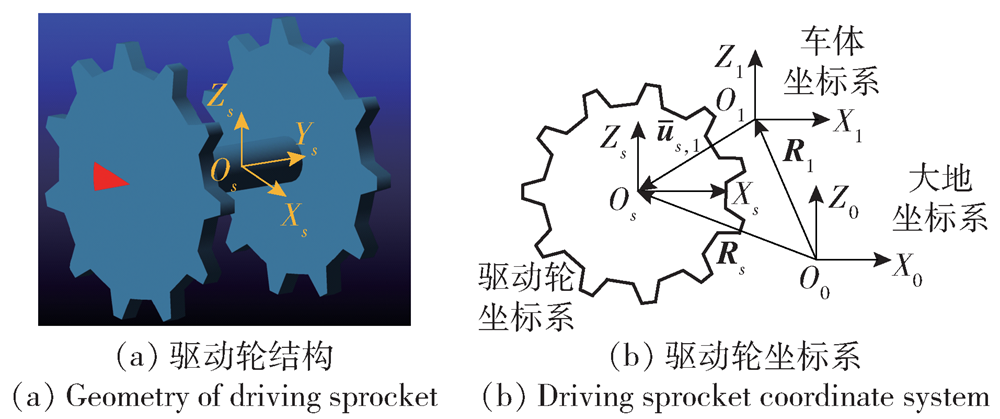
图2 驱动轮示意图
Fig.2 Diagrammatic sketch of driving sprocket
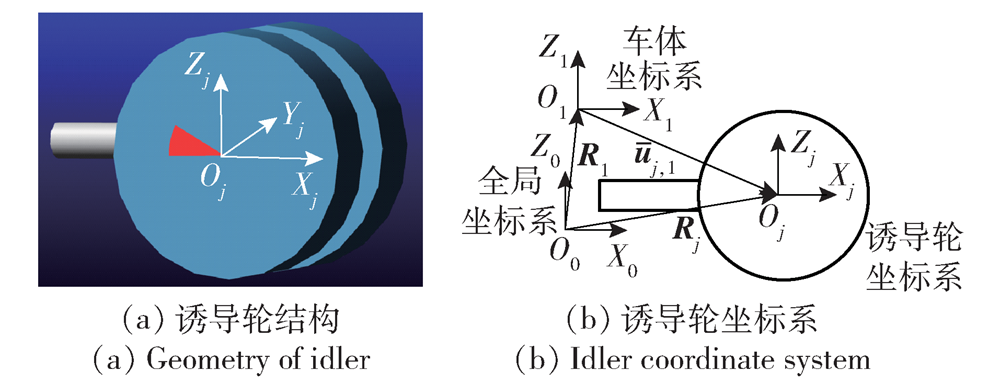
图3 诱导轮示意图
Fig.3 Diagrammatic sketch of idler
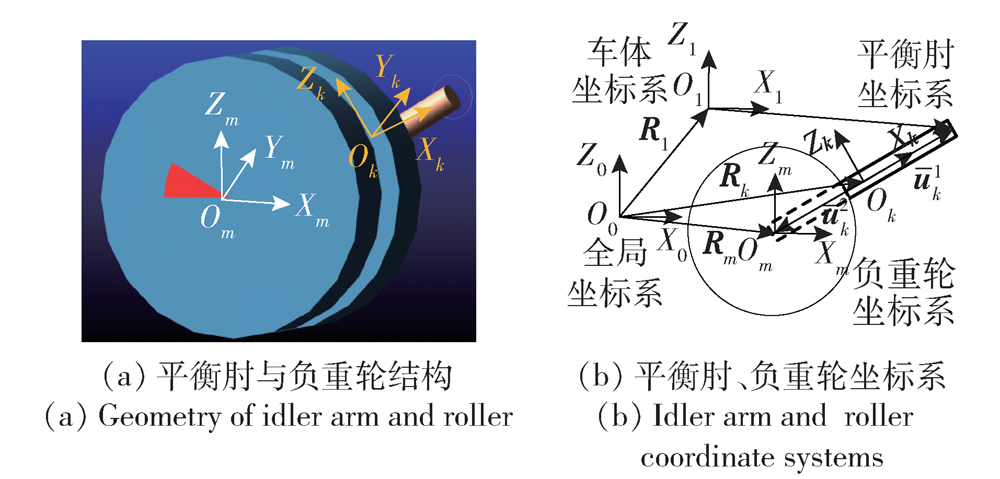
图4 平衡肘与负重轮示意图
Fig.4 Diagrammatic sketch of idler arm and roller

图5 相邻履带板示意图
Fig.5 Diagrammatic sketch of adjacent track links
图6 履带销与驱动轮接触
Fig.6 The contact of track pin and sprocket
图7 履带板与负重轮接触
Fig.7 The contact of track link and roller

图8 摩擦系数
Fig.8 Coefficient of friction

图9 侧向接触
Fig.9 Lateral contact

图10 履带板旋转关节示意图
Fig.10 Diagrammatic sketch of revolute joint between track links

图11 求解步骤流程图
Fig.11 Flowchart of solution
图12 纵向加速对比
Fig.12 Comparison of longitudinal accelerations
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 5.290×10-1 | 3.521×10-2 |
| 纵向速度/(m·s-1) | 1.249×10-1 | 9.895×10-3 |
| 垂向位移/m | 3.389×10-3 | 2.346×10-4 |
| 垂向速度/(m·s-1) | 4.547×10-2 | 1.582×10-3 |
| 俯仰角/rad | 7.124×10-3 | 5.162×10-4 |
| 俯仰角速度/(rad·s-1) | 2.672×10-2 | 9.156×10-4 |
表1 纵向加速误差
Table 1 Longitudinal acceleration error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 5.290×10-1 | 3.521×10-2 |
| 纵向速度/(m·s-1) | 1.249×10-1 | 9.895×10-3 |
| 垂向位移/m | 3.389×10-3 | 2.346×10-4 |
| 垂向速度/(m·s-1) | 4.547×10-2 | 1.582×10-3 |
| 俯仰角/rad | 7.124×10-3 | 5.162×10-4 |
| 俯仰角速度/(rad·s-1) | 2.672×10-2 | 9.156×10-4 |
图13 纵向减速对比
Fig.13 Comparison of longitudinal decelerations
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 1.554×10-1 | 1.471×10-2 |
| 纵向速度/(m·s-1) | 1.083×10-1 | 5.511×10-3 |
| 垂向位移/m | 5.163×10-3 | 2.680×10-4 |
| 垂向速度/(m·s-1) | 4.274×10-2 | 1.124×10-3 |
| 俯仰角/rad | 5.738×10-3 | 4.401×10-4 |
| 俯仰角速度/(rad·s-1) | 1.754×10-2 | 7.596×10-4 |
表2 纵向减速误差
Table 2 Longitudinal deceleration error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 1.554×10-1 | 1.471×10-2 |
| 纵向速度/(m·s-1) | 1.083×10-1 | 5.511×10-3 |
| 垂向位移/m | 5.163×10-3 | 2.680×10-4 |
| 垂向速度/(m·s-1) | 4.274×10-2 | 1.124×10-3 |
| 俯仰角/rad | 5.738×10-3 | 4.401×10-4 |
| 俯仰角速度/(rad·s-1) | 1.754×10-2 | 7.596×10-4 |
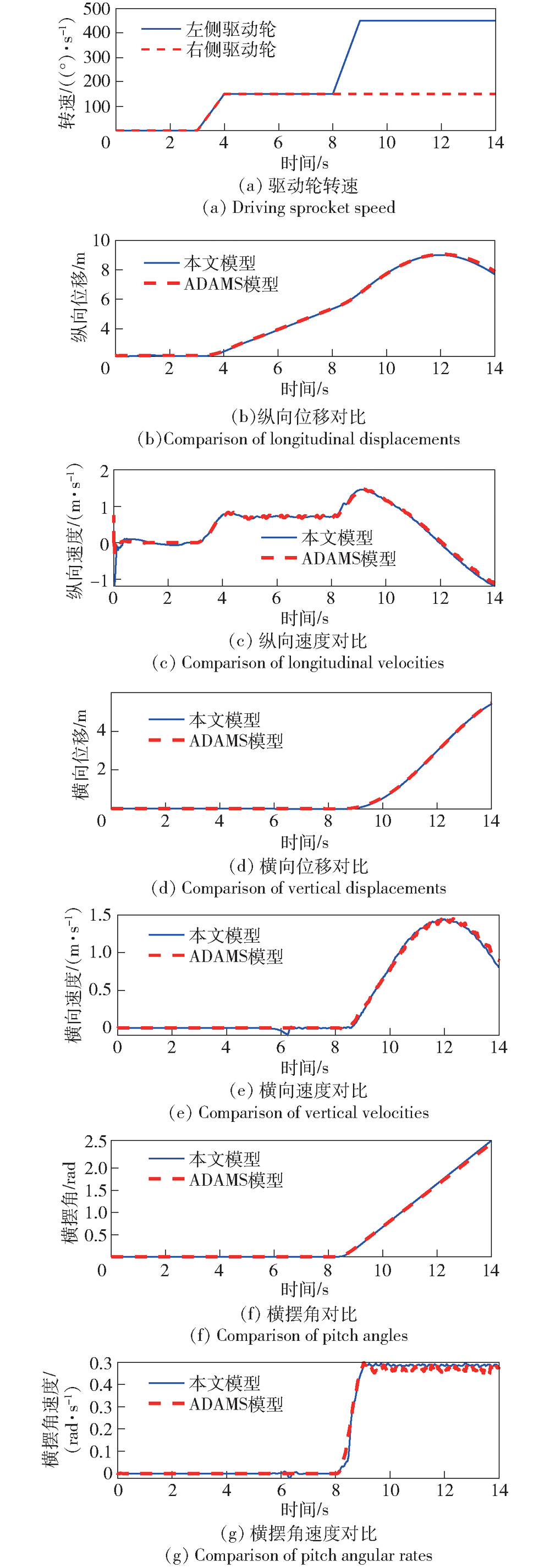
图14 转向工况对比
Fig.14 Comparison of steering working conditions
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.119×10-1 | 9.132×10-3 |
| 纵向速度/(m·s-1) | 1.614×10-1 | 6.746×10-3 |
| 横向位移/m | 5.422×10-2 | 3.147×10-3 |
| 横向速度/(m·s-1) | 1.085×10-1 | 4.212×10-3 |
| 横摆角/rad | 6.198×10-2 | 2.893×10-3 |
| 横摆角速度/(rad·s-1) | 1.000×10-1 | 2.329×10-3 |
表3 转向工况误差
Table 3 Steering error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.119×10-1 | 9.132×10-3 |
| 纵向速度/(m·s-1) | 1.614×10-1 | 6.746×10-3 |
| 横向位移/m | 5.422×10-2 | 3.147×10-3 |
| 横向速度/(m·s-1) | 1.085×10-1 | 4.212×10-3 |
| 横摆角/rad | 6.198×10-2 | 2.893×10-3 |
| 横摆角速度/(rad·s-1) | 1.000×10-1 | 2.329×10-3 |
| [1] |
邹渊, 张彬, 张旭东, 等. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10): 2159-2169.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.011 |
|
| [2] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3): 456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
王克运, 张相洪, 史力晨, 等. 履带车辆越障过程的动力学仿真[J]. 兵工学报, 2005, 26(5):577-583.
|
|
|
|
| [7] |
马星国, 李方贵, 尤小梅. 履带车辆悬挂系统当量化及车辆平面数学模型建立[J]. 机械工程学报, 2015, 51(18):143-150.
doi: 10.3901/JME.2015.18.143 |
|
|
|
| [8] |
李春明, 吴维, 郭智蔷, 等. 履带车辆纵向与垂向耦合动力学模型及功率特性[J]. 兵工学报, 2021, 42(3):449-458.
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
| [9] |
|
| [10] |
刘妤, 谢铌, 张拓, 等. 履带车辆软坡地面力学建模及行驶性能分析[J]. 机械设计, 2021, 38(3):110-118.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
蒲明辉, 吴江. 基于ADAMS的链传动多体动力学模型研究[J]. 机械设计与研究, 2008, 24(2):57-59
|
|
|
|
| [21] |
|
| [22] |
刘延柱, 潘振宽, 戈新生. 多体系统动力学[M]. 第2版. 北京: 高等教育出版社, 2014.
|
|
|
| [1] | 袁艺, 盖江涛, 曾根, 周广明, 李训明, 马长军. 高速履带车辆横摆运动响应特性分析与试验验证[J]. 兵工学报, 2024, 45(4): 1094-1107. |
| [2] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [3] | 王绪, 李睿, 黄英, 沈继伟, 商显赫. 考虑不同路面特征的军用履带车辆循环工况构建[J]. 兵工学报, 2024, 45(3): 907-915. |
| [4] | 肖万港, 周云波, 傅耀宇, 张明, 周军, 葛纪桃. 土壤对军用越野车辆机动性能影响分析[J]. 兵工学报, 2024, 45(1): 288-298. |
| [5] | 杜万闪, 周洲, 拜昱, 张志林, 王科雷. 组合式飞行器多体动力学建模与飞行力学特性[J]. 兵工学报, 2023, 44(8): 2245-2262. |
| [6] | 刘佳, 刘海鸥, 陈慧岩, 毛飞鸿. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276. |
| [7] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [8] | 曾子豪, 张京东, 龚雪莲, 刘坤明, 桂学文, 廖日东. 拉伸载荷下双销式履带板强度计算方法[J]. 兵工学报, 2023, 44(3): 831-840. |
| [9] | 生辉, 项昌乐, 盖江涛, 袁艺, 简洪超, 张楠. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44(11): 3498-3507. |
| [10] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [11] | 张发平, 张书畅, 武锴, 张云贺, 阎艳. 基于代理模型进化的履带车辆动力学参数优化[J]. 兵工学报, 2023, 44(1): 27-39. |
| [12] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [13] | 袁艺, 盖江涛, 周广明, 高秀才, 李训明, 马长军. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213. |
| [14] | 帅志斌, 贺帅, 李国辉, 李耀恒, 李勇, 张颖, 简洪超. 特种履带车辆机电复合传动装置低温启动过程建模与优化控制[J]. 兵工学报, 2023, 44(1): 117-128. |
| [15] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4