
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (12): 4311-4322.doi: 10.12382/bgxb.2023.0979
任宏斌1, 孙纪禹1, 陈志铿2, 赵玉壮1,*( ), 杨林1
), 杨林1
收稿日期:2023-09-27
上线日期:2024-01-11
通讯作者:
基金资助:
REN Hongbin1, SUN Jiyu1, Chih-Keng CHEN2, ZHAO Yuzhuang1,*(), YANG Lin1
Received:2023-09-27
Online:2024-01-11
摘要:
针对高速自动驾驶车辆实时高精度的运动控制问题,提出一种上层为基于路径点Cost的路径点筛选器与基于横纵向轮胎力分析的速度规划器、下层为基于线性时变动力学模型预测的路径跟踪控制器与速度控制器的两层架构,并引入最小均方(Least Mean Square, LMS)自适应状态估计器提升系统的抗噪性。路径点筛选器提升运算速度并减少筛选过程中的关键信息损失,速度规划器在安全行驶前提下生成最优速度曲线。路径跟踪控制器考虑跟踪偏差软约束,提升跟踪效果。LMS状态估计器基于在线矫正的动力学模型,对横摆角速度与横向速度在线估计。搭建dSPACE-TX2硬件在环仿真环境,在高速公路工况及双移线工况下对比所提出方案与传统运动跟踪控制。半实物仿真结果表明,所提出的运动控制架构提升了抗噪性能与21%的跟踪精度,且满足50Hz高频控制的要求。
中图分类号:
任宏斌, 孙纪禹, 陈志铿, 赵玉壮, 杨林. 基于线性时变模型预测控制的实时抗噪高速车辆运动控制[J]. 兵工学报, 2024, 45(12): 4311-4322.
REN Hongbin, SUN Jiyu, Chih-Keng CHEN, ZHAO Yuzhuang, YANG Lin. LTV-MPC-based Real-time and Anti-noise Motion Control for High-speed Vehicle[J]. Acta Armamentarii, 2024, 45(12): 4311-4322.
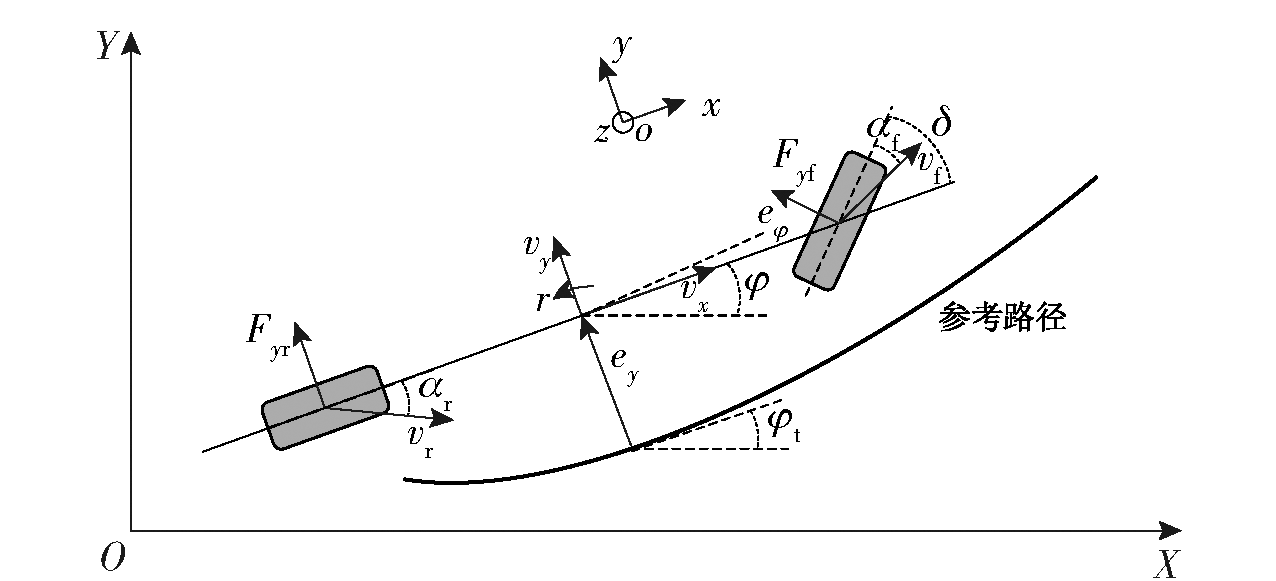
图1 单轨车辆模型
Fig.1 Single-track vehicle model

图2 双层架构车辆运动控制系统
Fig.2 Two-layer architecture vehicle motion control system
| χi | 风险等级描述 | χi | 风险等级描述 |
|---|---|---|---|
| 0 | 低风险 | 2 | 较高风险 |
| 1 | 一般风险 | 3 | 高风险 |
表1 路况风险分级
Table 1 Risk classification of road conditions
| χi | 风险等级描述 | χi | 风险等级描述 |
|---|---|---|---|
| 0 | 低风险 | 2 | 较高风险 |
| 1 | 一般风险 | 3 | 高风险 |
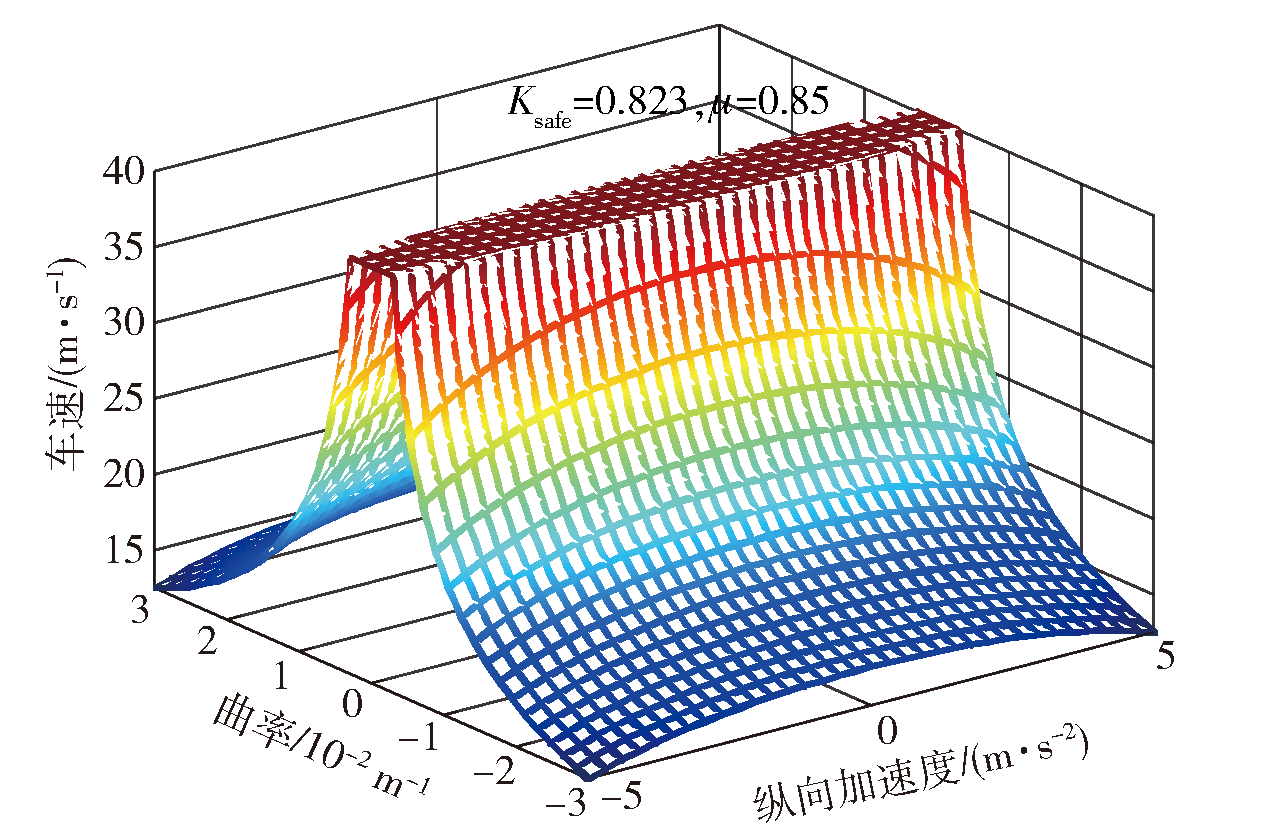
图3 加速度-曲率-车速关系
Fig.3 Acceleration-curvature-speed relation
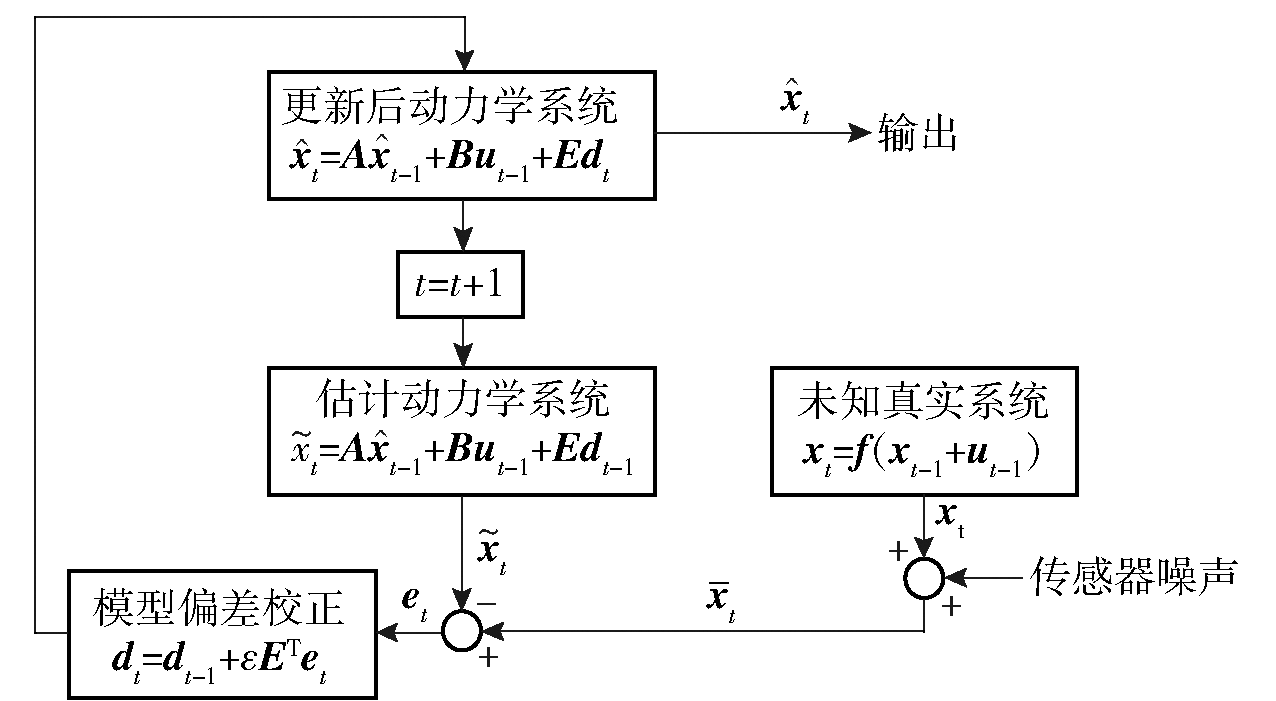
图4 LMS状态估计器算法框架
Fig.4 LMS state estimator algorithm framework

图5 硬件在环仿真环境
Fig.5 Hardware-in-the-loop simulation environment
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| Lf/m | 1.015 | Bpr | 10 |
| Lr/m | 1.895 | Cpf | 1.35 |
| m/kg | 1270 | Cpr | 1.3 |
| Iz/kgm2 | 1536.7 | Dpf | 7700 |
| Cf/(N·rad-1) | 78944 | Dpr | 4341 |
| Cr/(N·rad-1) | 44493 | Epf | -1.5 |
| Bpf | 10 | Epr | -1.5 |
表2 仿真车辆参数
Table 2 Simulated vehicle parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| Lf/m | 1.015 | Bpr | 10 |
| Lr/m | 1.895 | Cpf | 1.35 |
| m/kg | 1270 | Cpr | 1.3 |
| Iz/kgm2 | 1536.7 | Dpf | 7700 |
| Cf/(N·rad-1) | 78944 | Dpr | 4341 |
| Cr/(N·rad-1) | 44493 | Epf | -1.5 |
| Bpf | 10 | Epr | -1.5 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 0.5 | eymax/m | 0.05 | |
| 2 | eφmax/(°) | 5 | |
| 1 | Np | 40 | |
| qδ | 100 | Nc | 20 |
| 500 | T/s | 0.02 | |
| 500 | f/Hz | 50 | |
| δmax/(°) | 30 | εw | 0.99 |
| Δδmax/((°)·s-1 | 100 | εh | 0.008 |
表3 仿真MPC参数
Table 3 Simulated MPC parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 0.5 | eymax/m | 0.05 | |
| 2 | eφmax/(°) | 5 | |
| 1 | Np | 40 | |
| qδ | 100 | Nc | 20 |
| 500 | T/s | 0.02 | |
| 500 | f/Hz | 50 | |
| δmax/(°) | 30 | εw | 0.99 |
| Δδmax/((°)·s-1 | 100 | εh | 0.008 |
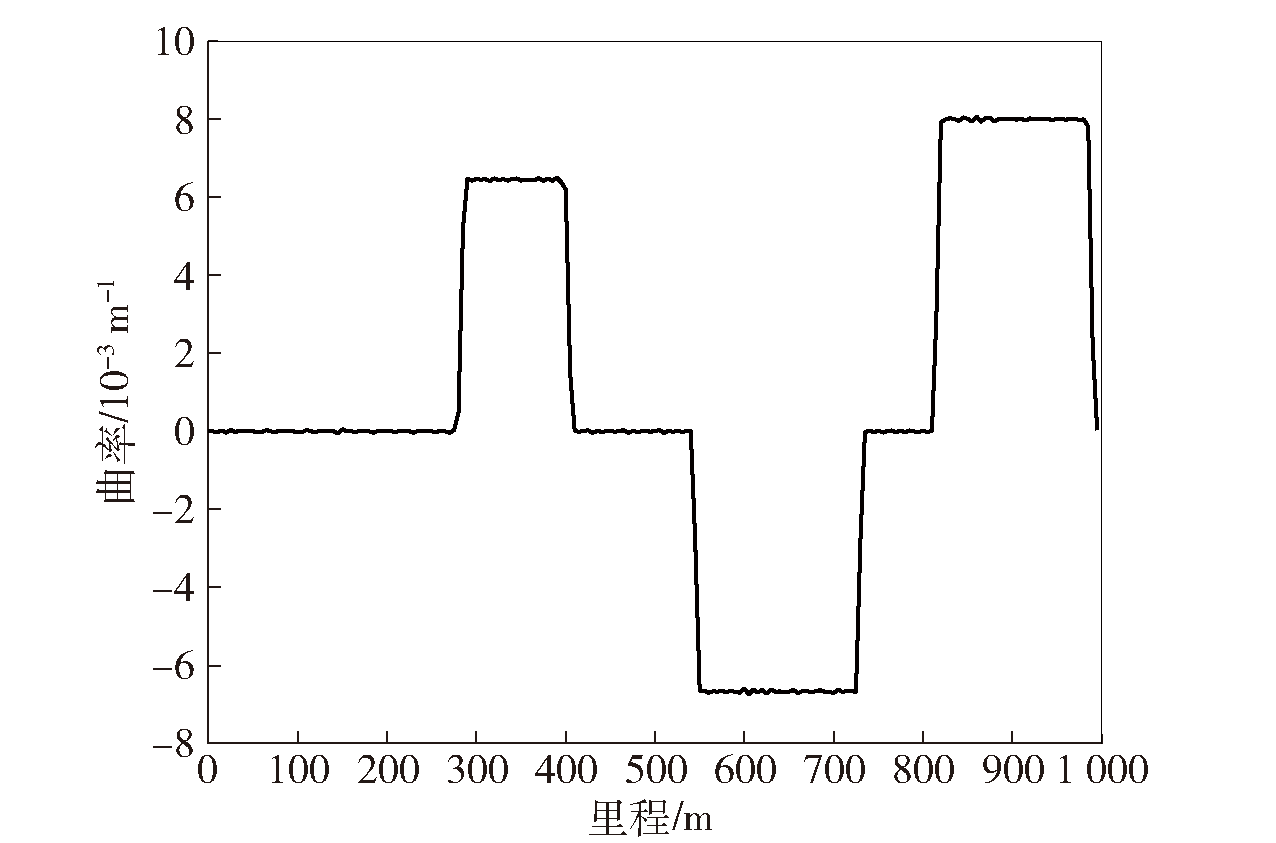
图6 高速公路工况曲率
Fig.6 Highway curvature
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| wκ | 0.5 | Ksafe | 0.823 |
| wd | 2 | μ | 0.85 |
| ωχ | 1 |
表4 路径点筛选器与车速规划器参数
Table 4 Parameters of path point filter and velocity planner
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| wκ | 0.5 | Ksafe | 0.823 |
| wd | 2 | μ | 0.85 |
| ωχ | 1 |
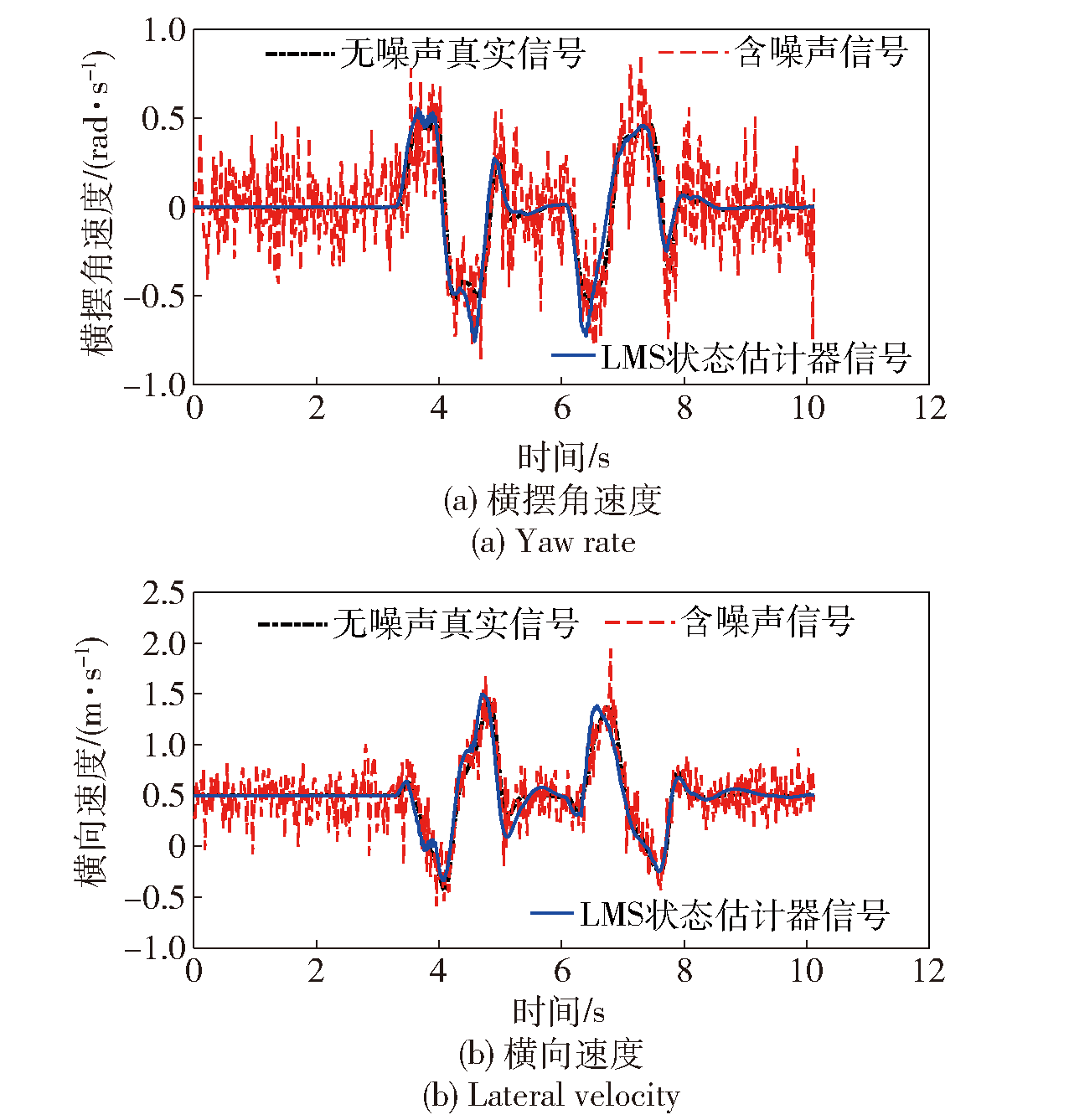
图7 LMS状态估计器处理前后状态量
Fig.7 State variables before and after processing by LMS state estimator
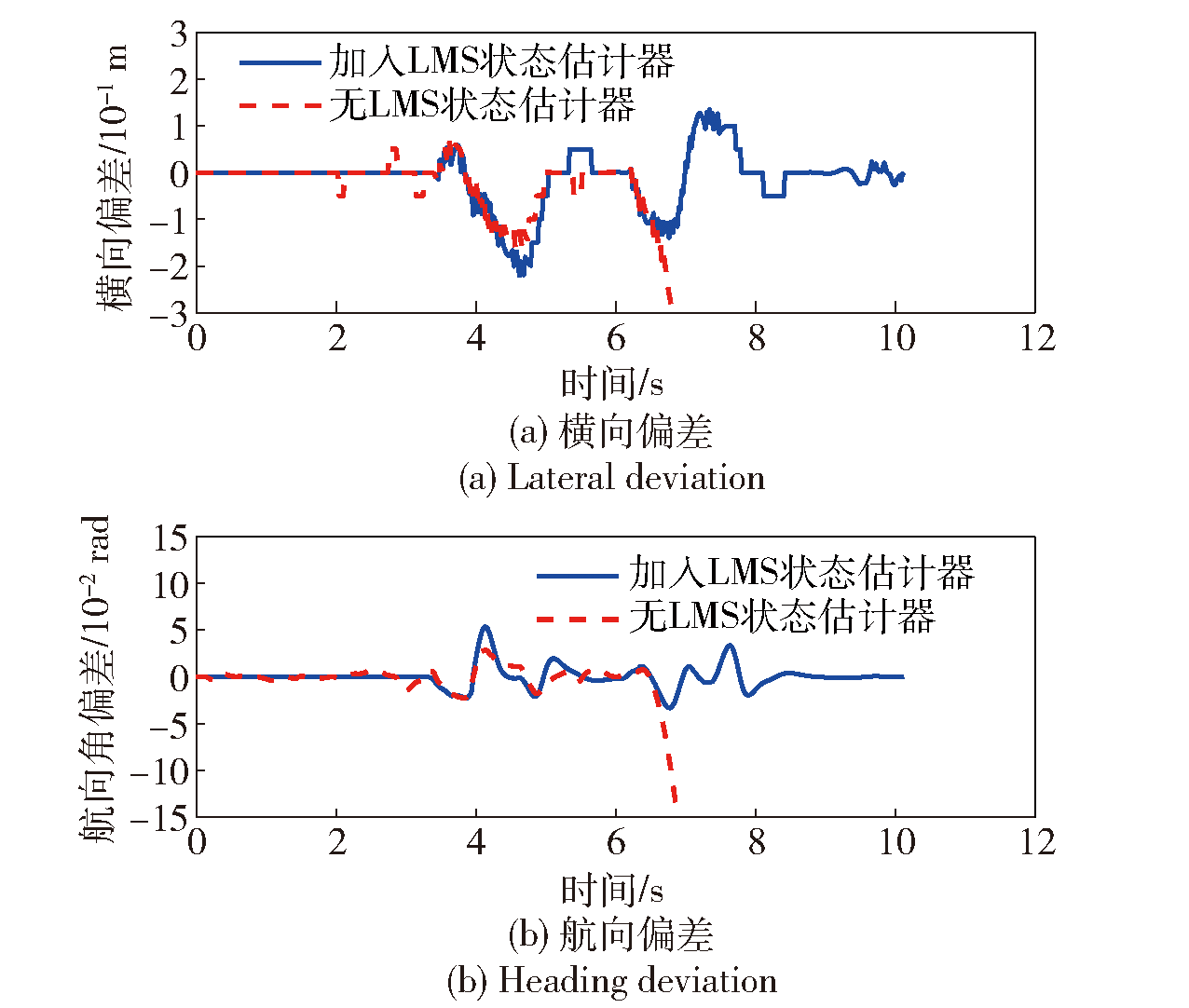
图8 有无LMS状态估计器跟踪偏差
Fig.8 Tracking deviation with and without LMS state estimator
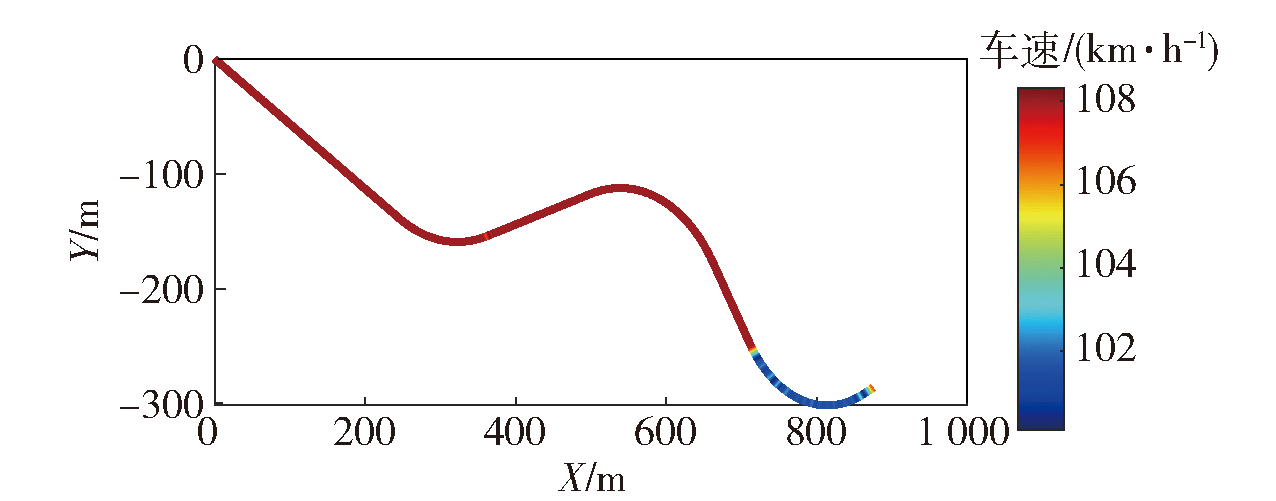
图9 高速公路工况运动控制结果
Fig.9 Motion control results under the condition of highway
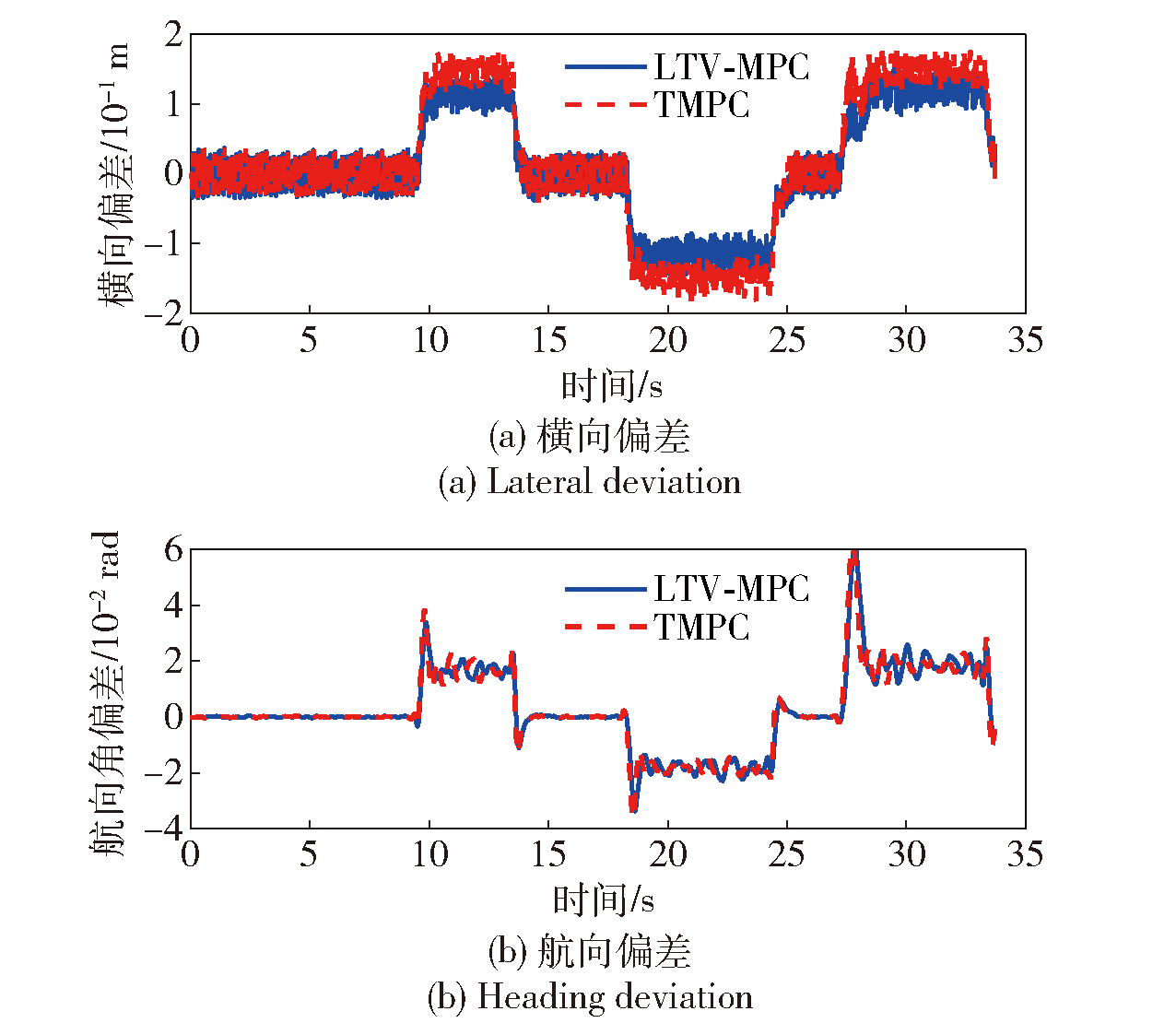
图10 高速公路工况跟踪偏差
Fig.10 Tracking deviation under the condition of highway
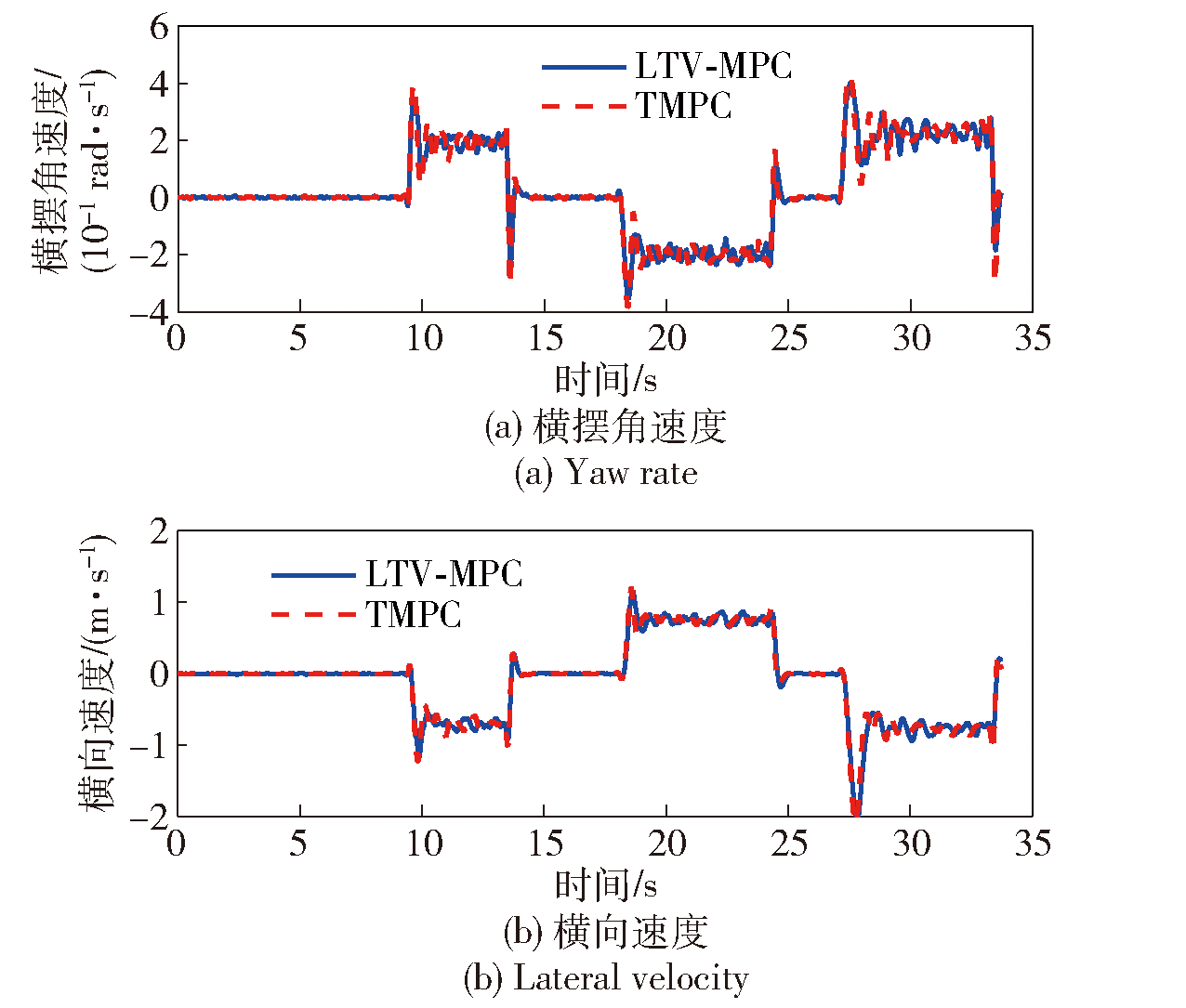
图11 高速公路工况横摆角速度、横向速度
Fig.11 Highway condition yaw rate and lateral velocity under the condition of highway
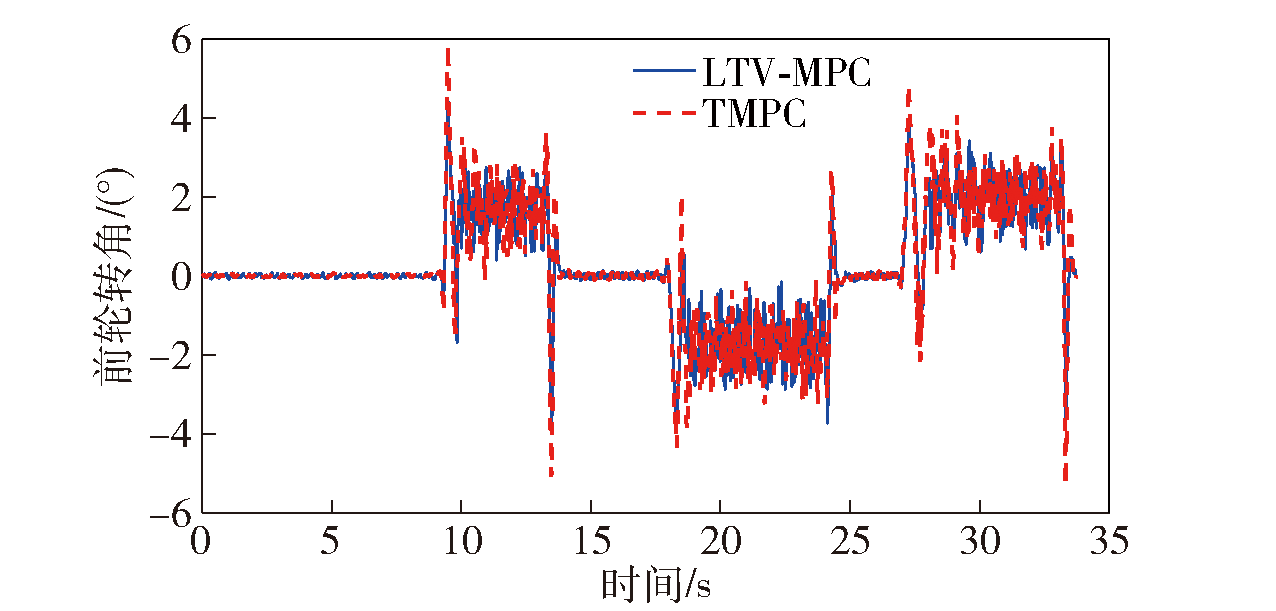
图12 高速公路工况前轮转角
Fig.12 Steering angle of front wheel under the condition of highway
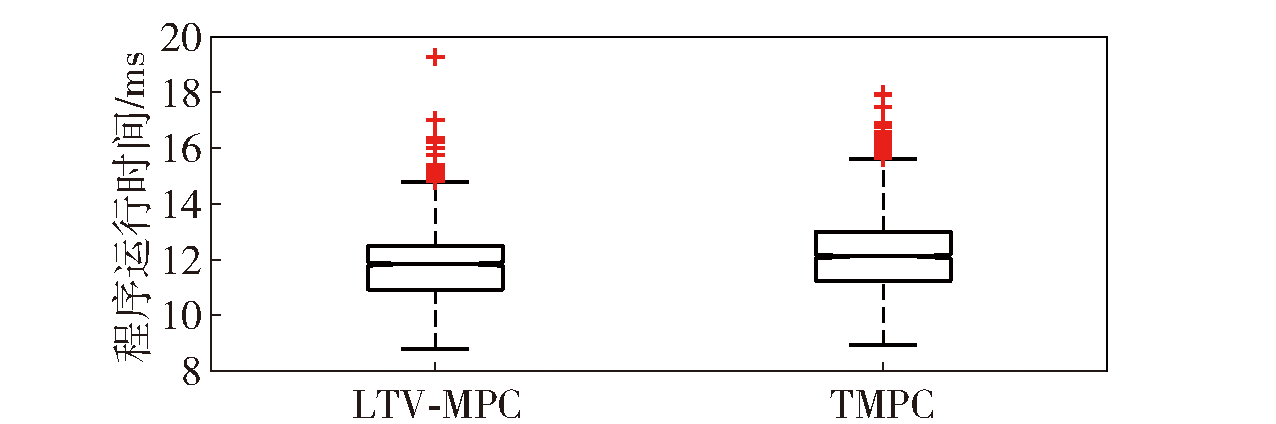
图13 高速公路工况程序运行时间
Fig.13 Highway condition program runtime
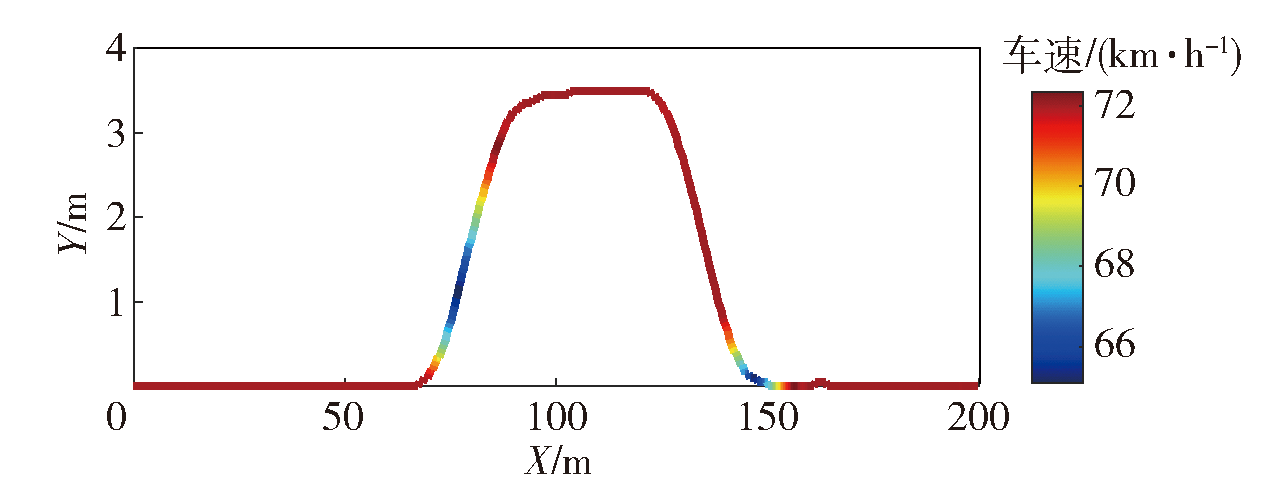
图14 双移线工况运动控制结果
Fig.14 Motion control results under double line change condition
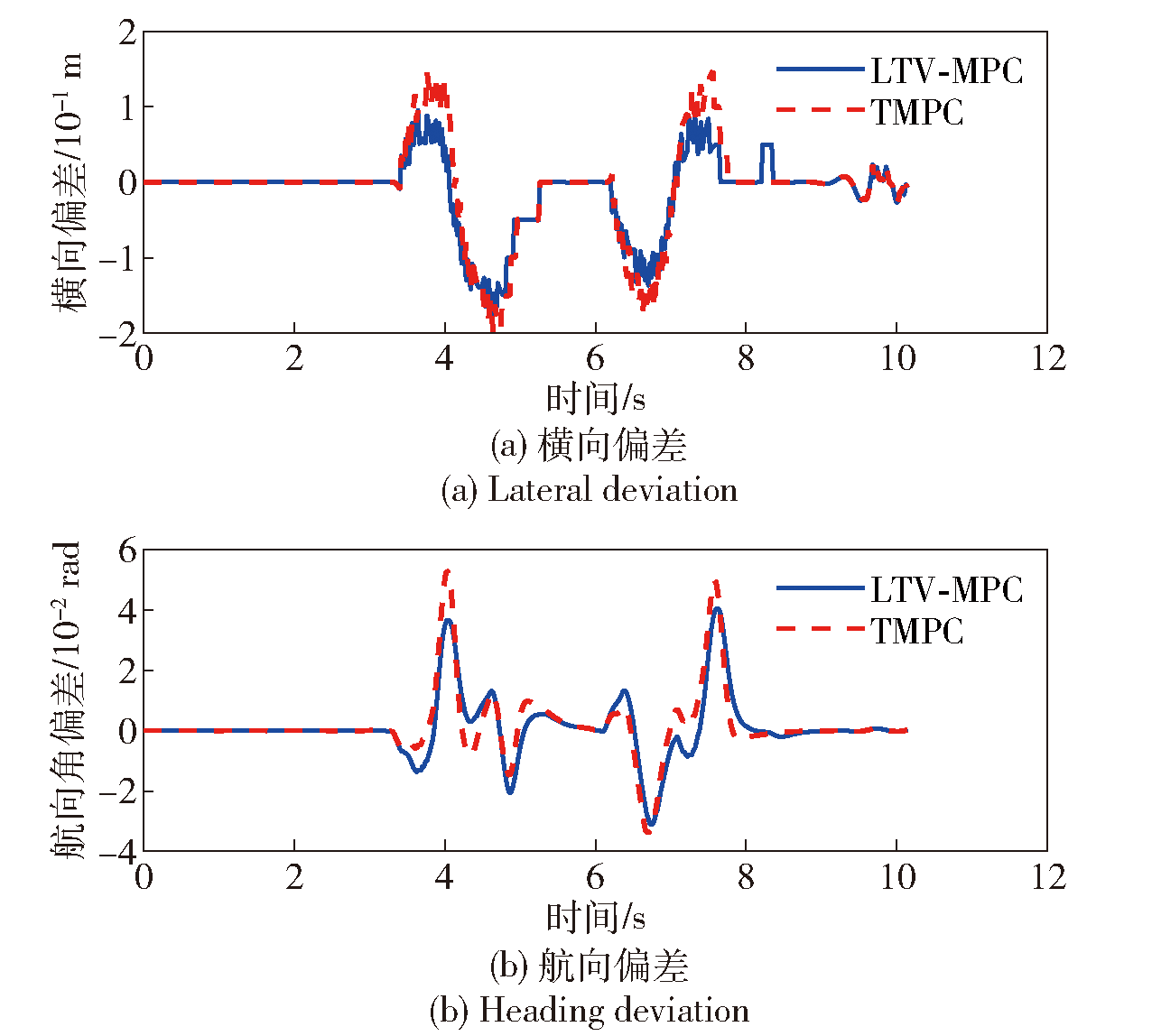
图15 双移线工况跟踪偏差
Fig.15 Tracking deviation under double line change condition
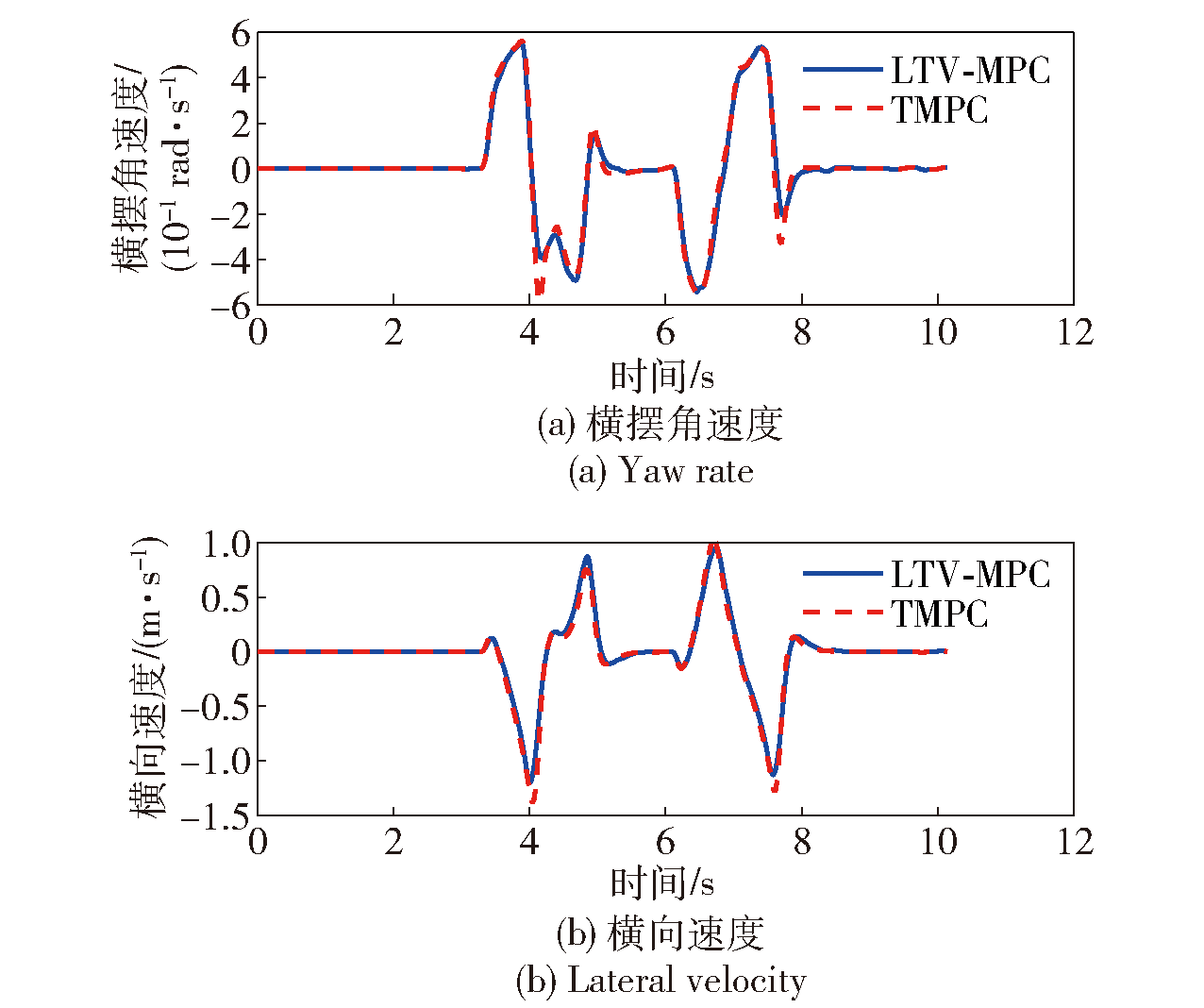
图16 双移线工况横摆角速度、横向速度
Fig.16 Yaw rate and lateral velocity under double line change condition
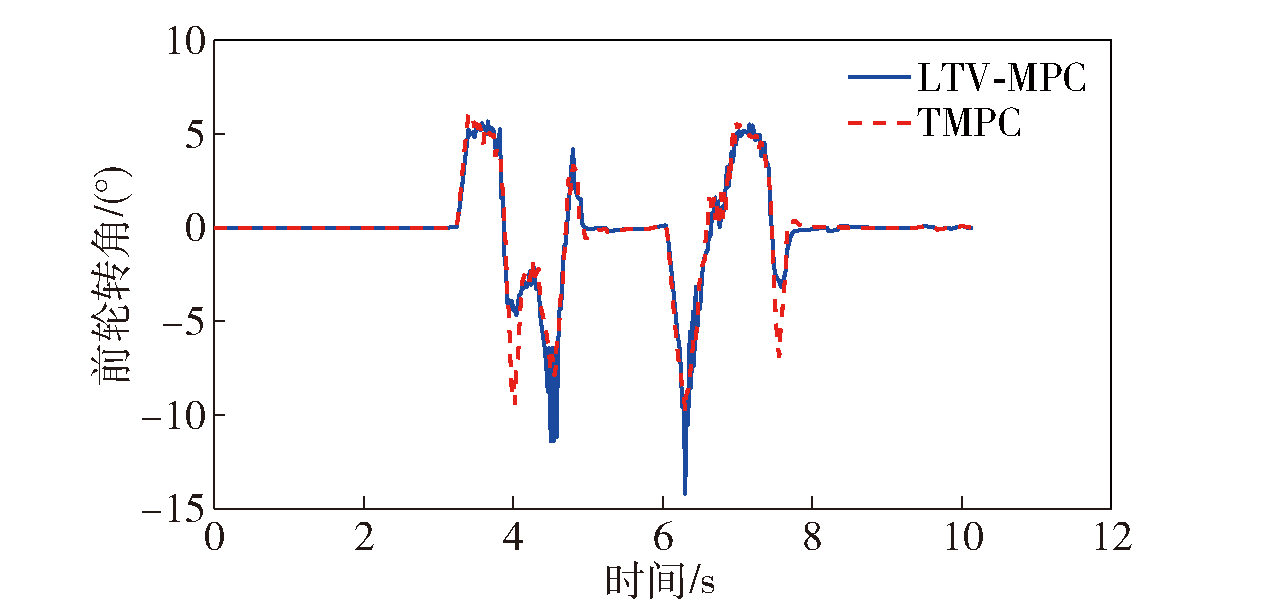
图17 双移线工况前轮转角
Fig.17 Steering angle of front wheel under double line change condition
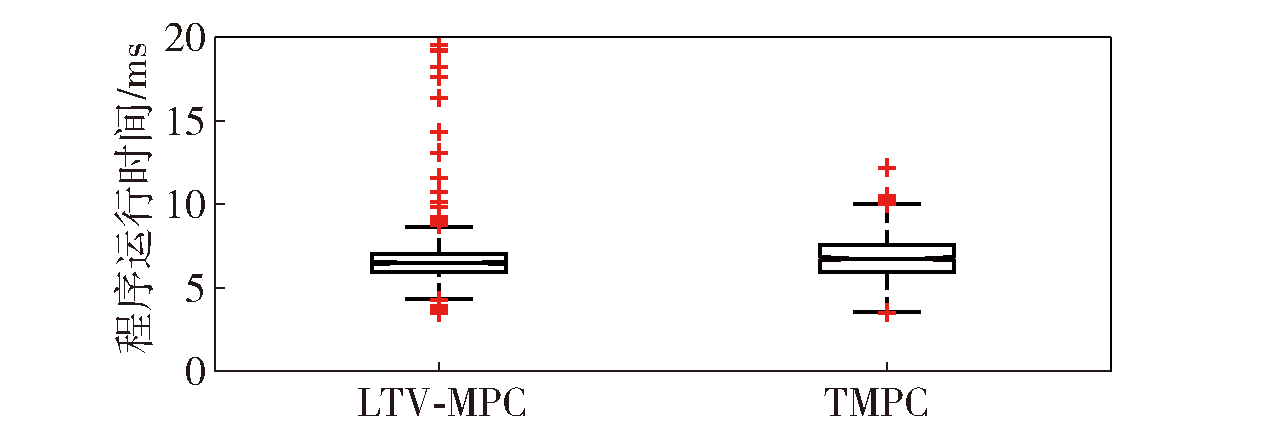
图18 双移线工况程序运行时间
Fig.18 Program runtime under double line change condition
| [1] |
|
| [2] |
|
| [3] |
高琳琳, 唐风敏, 郭蓬, 等. 自动驾驶横向运动控制的改进LQR方法研究[J]. 机械科学与技术, 2021, 40(3): 435-441.
|
|
|
|
| [4] |
胡杰, 钟鑫凯, 陈瑞楠, 等. 基于模糊LQR的智能汽车路径跟踪控制[J]. 汽车工程, 2022, 44(1): 17-25,43.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
doi: 10.1109/LRA.2019.2926677 |
| [16] |
|
| [17] |
|
| [18] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [1] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [2] | 王绪, 高晓宇, 黄英, 崔涛, 骆承良. 模型失配条件下混合动力两栖车功率协调预测控制[J]. 兵工学报, 2024, 45(12): 4578-4588. |
| [3] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [4] | 邢伯阳, 许威, 李宇峰, 赵浩宇, 王康, 闫曈. 基于分层解耦的四轮足机器人模型预测控制[J]. 兵工学报, 2024, 45(12): 4272-4282. |
| [5] | 王天翔, 崔涛, 张付军, 赵彦凯. 基于MPC的电动复合增压柴油机进气压力控制[J]. 兵工学报, 2024, 45(10): 3642-3653. |
| [6] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [7] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [8] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [9] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [10] | 蒋岩, 丁语嫣, 张兴龙, 徐昕. 基于模型预测与策略学习的智能车辆人机协同控制算法[J]. 兵工学报, 2023, 44(11): 3465-3477. |
| [11] | 张渊博, 项昌乐, 王伟达, 陈泳丹. 基于粒子群优化-蚁群融合算法的分布式电驱动车辆模型预测转矩协调控制策略[J]. 兵工学报, 2023, 44(11): 3253-3258. |
| [12] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [13] | 周球, 周悦, 孙洪鸣, 郭威, 吴凯, 兰彦军. 深海着陆车路径规划及跟踪控制方法[J]. 兵工学报, 2023, 44(1): 298-306. |
| [14] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [15] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4