
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3253-3258.doi: 10.12382/bgxb.2022.0819
所属专题: 群体协同与自主技术
张渊博1,2, 项昌乐1, 王伟达1,*( ), 陈泳丹3
), 陈泳丹3
收稿日期:2022-09-13
上线日期:2023-07-02
通讯作者:
ZHANG Yuanbo1,2, XIANG Changle1, WANG Weida1,*(), CHEN Yongdan3
Received:2022-09-13
Online:2023-07-02
摘要:
针对分布式电驱动车辆多动力源耦合作用和高度非线性造成的动力学控制难题,以 7自由度整车动力学模型为预测模型,以粒子群优化-蚁群融合算法为优化方法,提出一种基于粒子群优化-蚁群融合算法的模型预测转矩协调控制策略,并搭建了仿真实验和实车试验平台,进行了多种工况试验。试验结果表明,新提出的转矩协调控制策略能够根据试验工况调整控制模式,实现动力性、经济性和操纵稳定性的综合最优控制效果。
中图分类号:
张渊博, 项昌乐, 王伟达, 陈泳丹. 基于粒子群优化-蚁群融合算法的分布式电驱动车辆模型预测转矩协调控制策略[J]. 兵工学报, 2023, 44(11): 3253-3258.
ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle[J]. Acta Armamentarii, 2023, 44(11): 3253-3258.
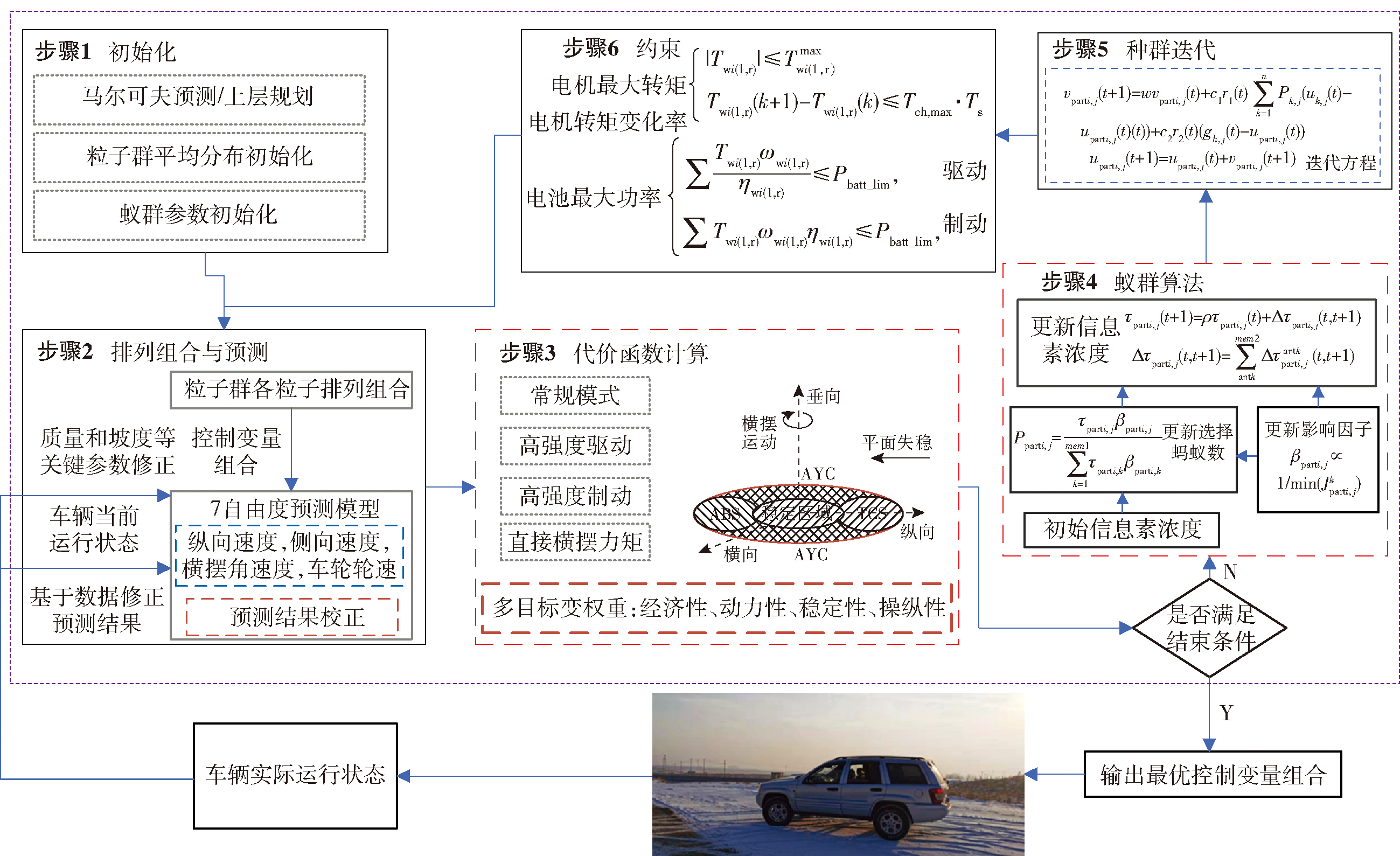
图1 基于粒子群优化-蚁群算法的分布式电驱动车辆模型预测转矩协调控制策略示意图
Fig.1 Model predictive torque coordination control strategy of distributed electric drive vehicle based on particle swarm optimization-ant colony optimization algorithm
| 试验设备 | 相关参数 |
|---|---|
| 车辆 | 迎风面积3m2,质量约2300kg |
| 电池组 | 磷酸铁锂电池组,电压340V,容量60A·h |
| 驱动电机 | 永磁同步电机,额定功率30kW,峰值功率70kW,额定转速3000r/min,峰值转速6000r/min,额定转矩100N·m,峰值转矩210N·m |
| 减速器 | 传动比3.4 |
| 轮胎 | 半径0.35m |
| 综合控制器 | RaPIDECU S1,芯片型号MPC5674F,32位,主频160MHz,CAN通道数4 |
表1 分布式驱动电动车的关键参数
Table 1 Key parameters of distributed drive electric vehicle
| 试验设备 | 相关参数 |
|---|---|
| 车辆 | 迎风面积3m2,质量约2300kg |
| 电池组 | 磷酸铁锂电池组,电压340V,容量60A·h |
| 驱动电机 | 永磁同步电机,额定功率30kW,峰值功率70kW,额定转速3000r/min,峰值转速6000r/min,额定转矩100N·m,峰值转矩210N·m |
| 减速器 | 传动比3.4 |
| 轮胎 | 半径0.35m |
| 综合控制器 | RaPIDECU S1,芯片型号MPC5674F,32位,主频160MHz,CAN通道数4 |
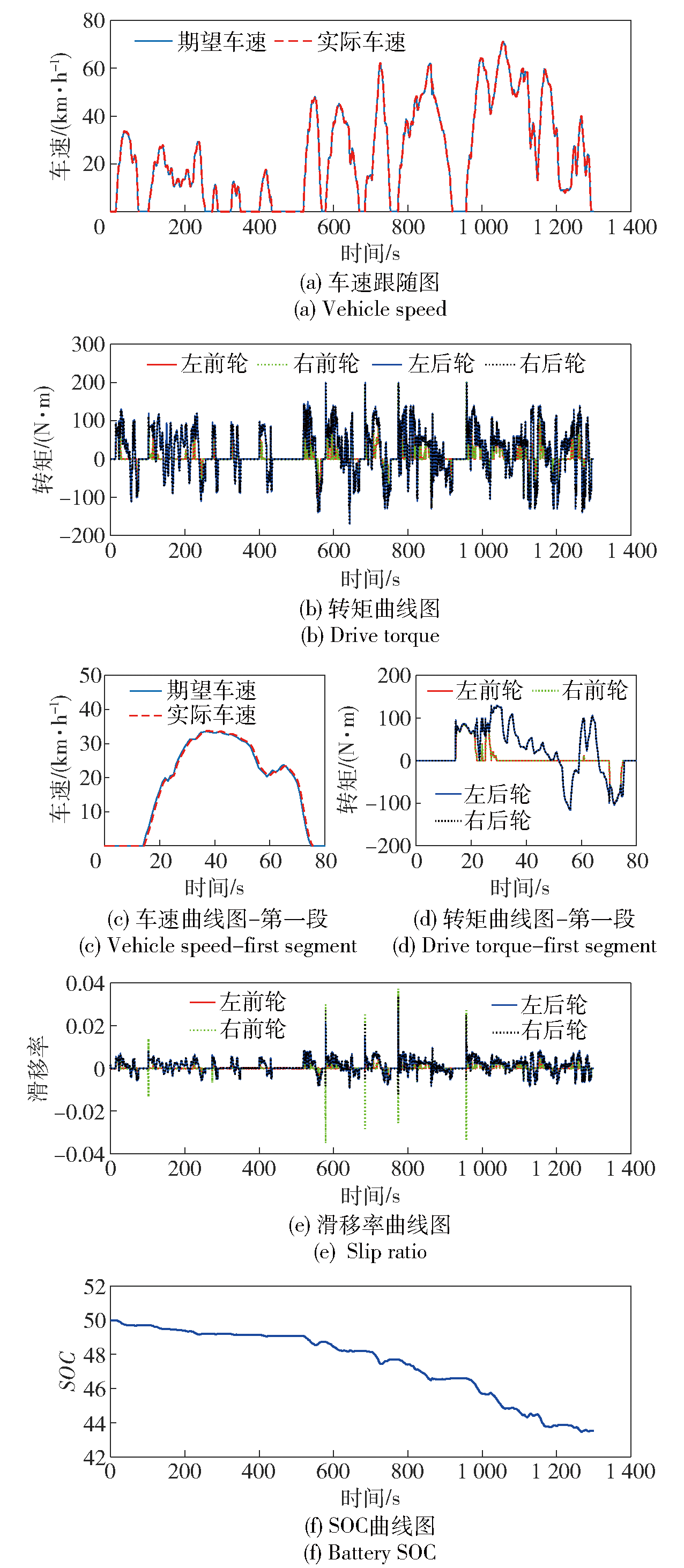
图2 模型预测转矩协调控制策略-中国汽车行驶工况
Fig.2 Model predictive torque coordination control strategy-Chinese automobile driving cycle
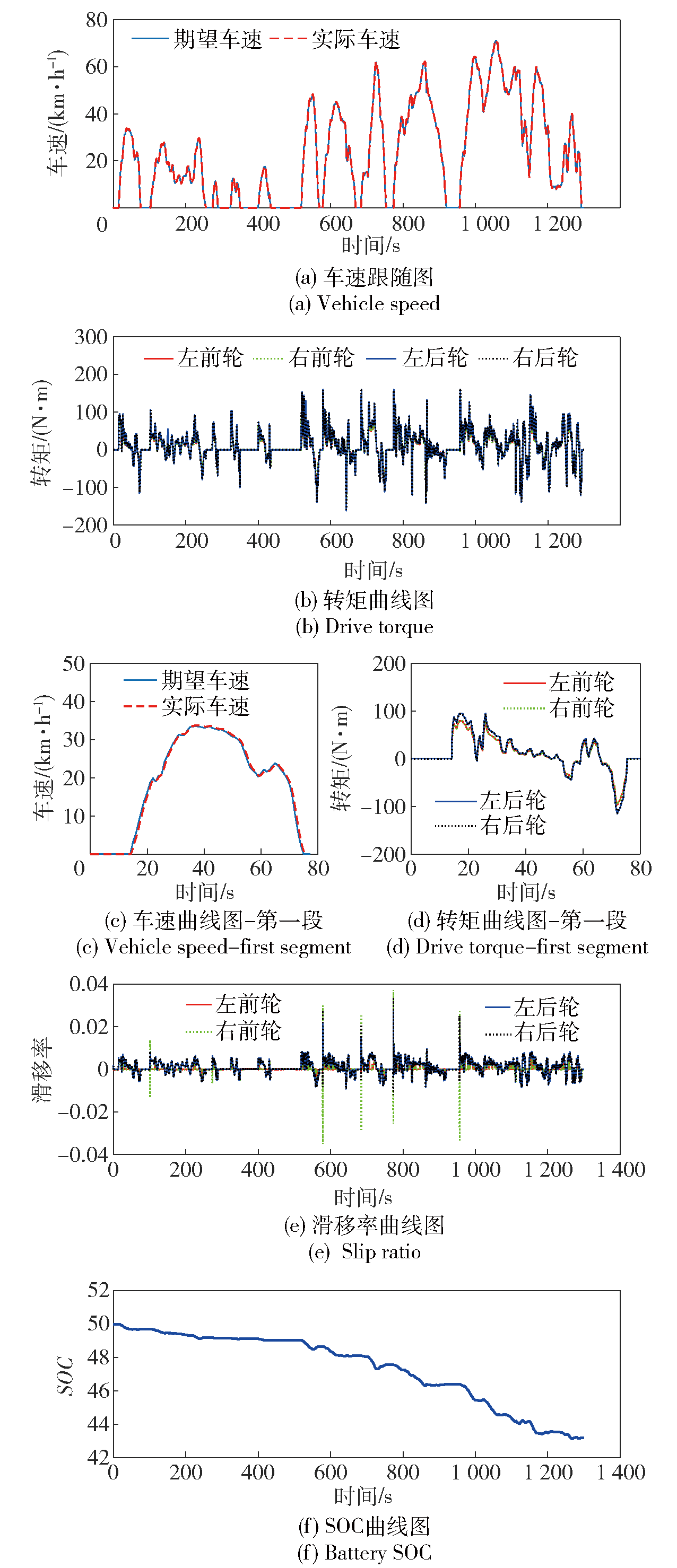
图3 规则式控制策略-中国汽车行驶工况
Fig.3 Rule-based control strategy-Chinese automobile driving cycle
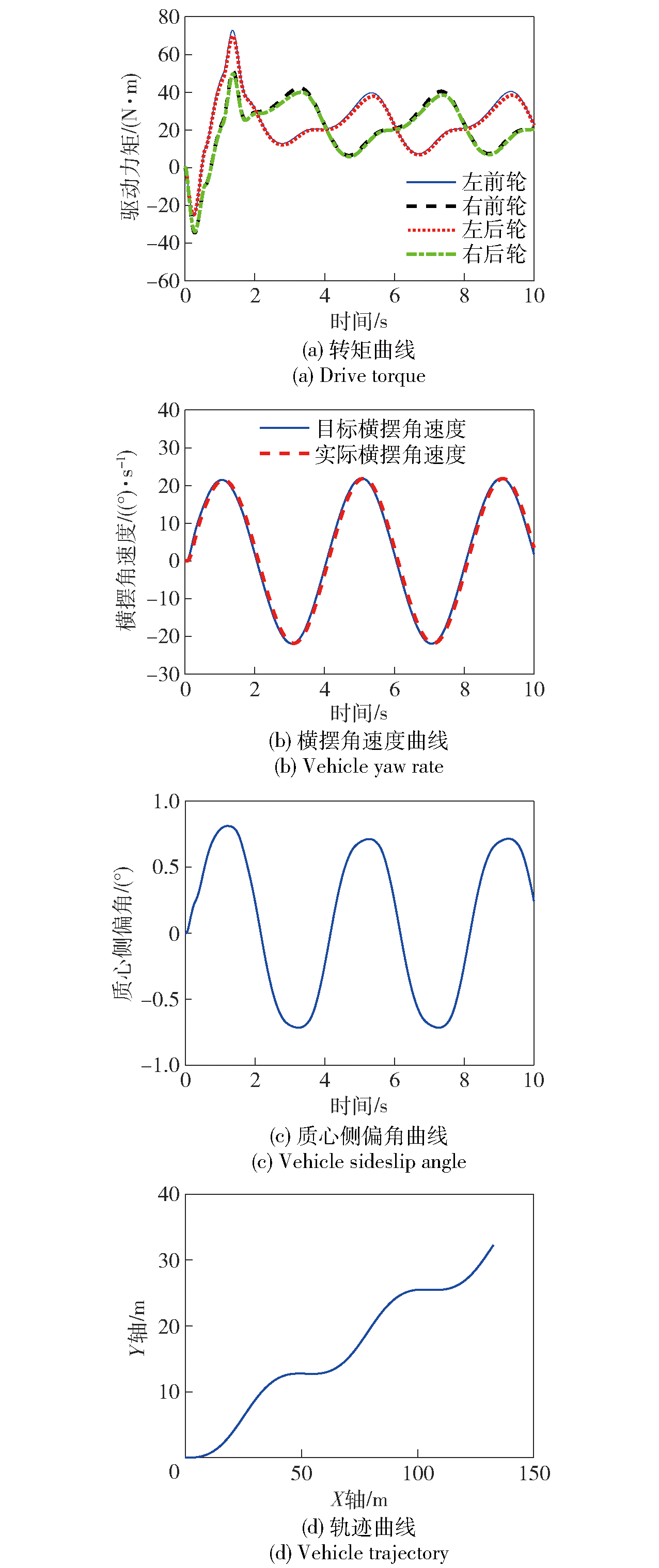
图4 模型预测转矩协调控制策略-正弦转向工况
Fig.4 Model predictive torque coordination control strategy-sinusoidal steering condition
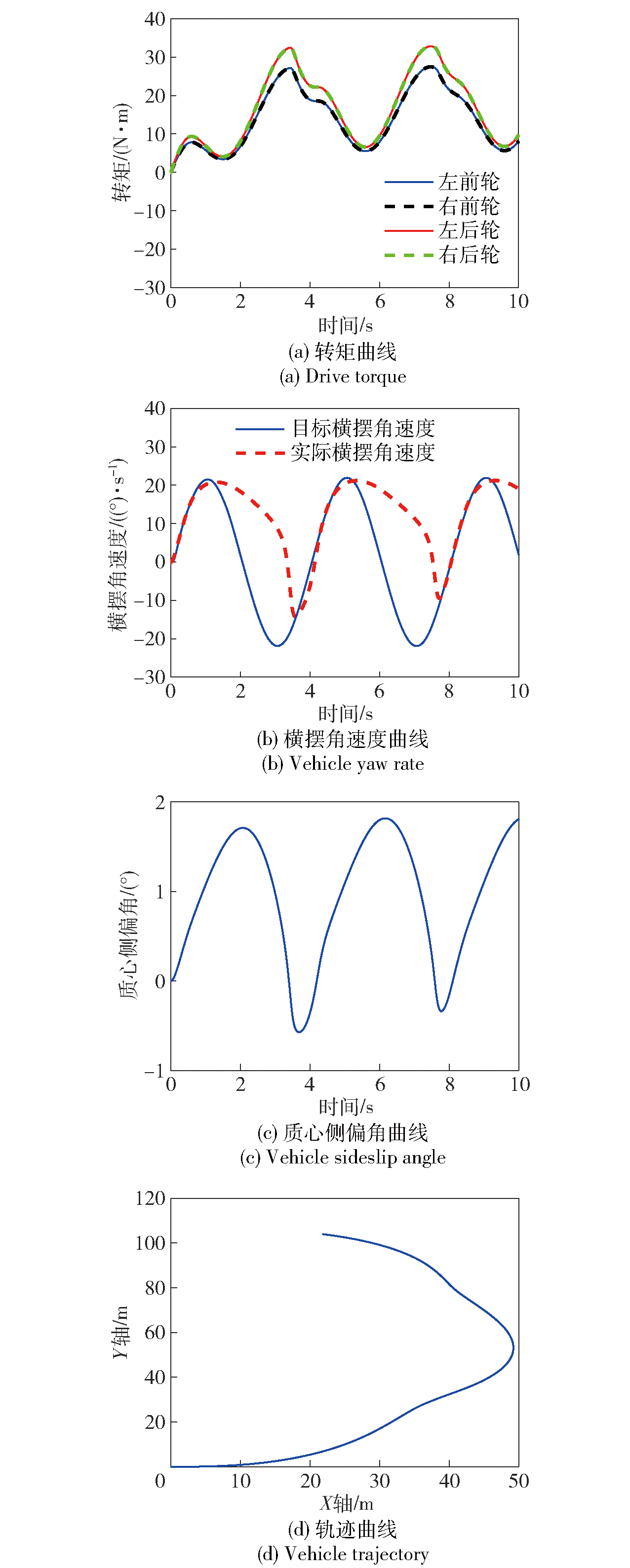
图5 无直接横摆力矩控制-正弦转向工况
Fig.5 No direct yaw torque control strategy-sinusoidal steering condition
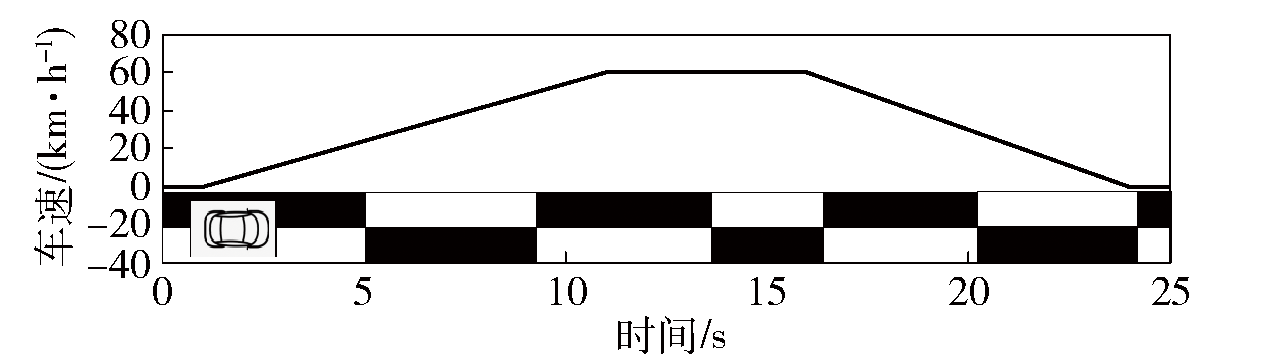
图6 棋盘附着循环工况示意图
Fig.6 Chessboard adhesion coefficient cycle
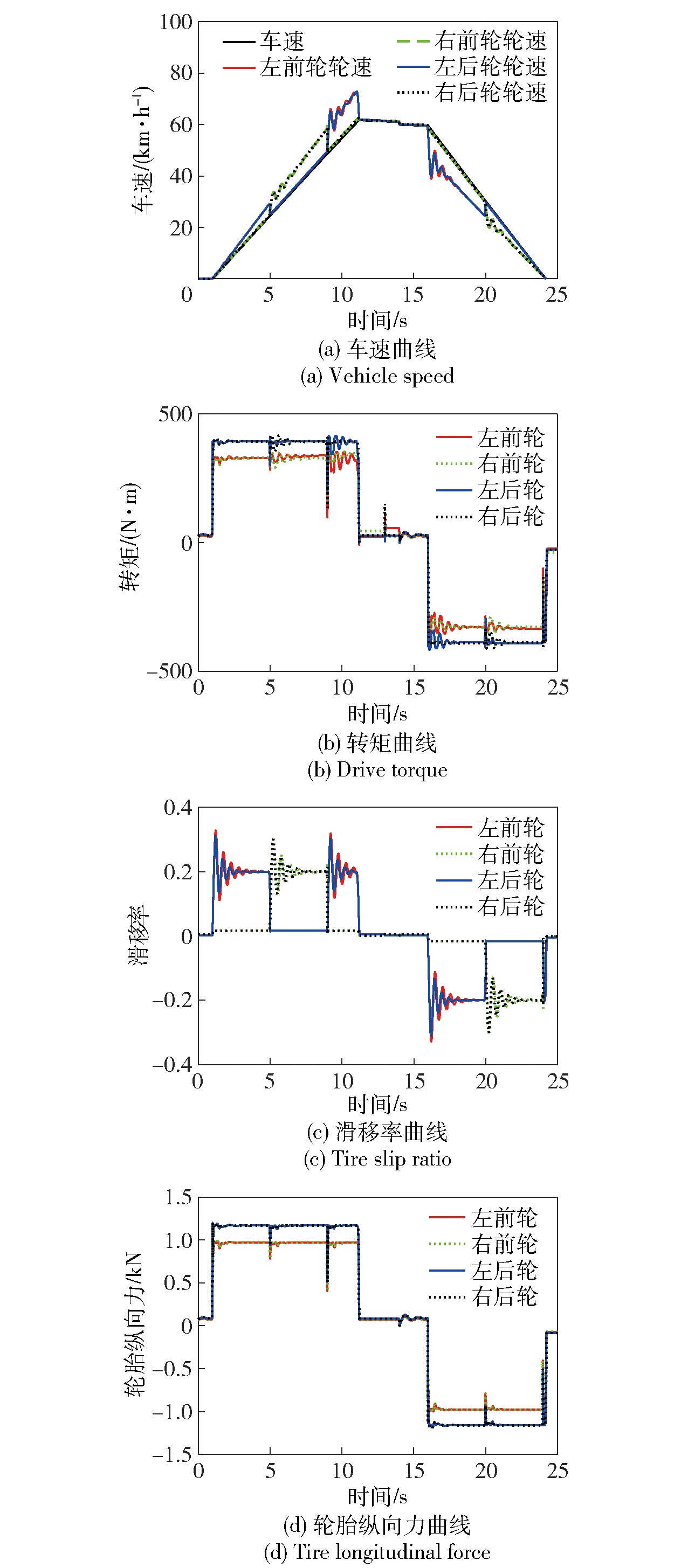
图7 模型预测转矩协调控制策略-棋盘附着循环工况
Fig.7 Model predictive torque coordinaion control strategy-chessboard adhesion coefficient cycle

图8 PID控制策略-棋盘附着循环工况
Fig.8 PID control strategy-chessboard adhesion coefficient cycle

图9 试验样车
Fig.9 Test vehicle
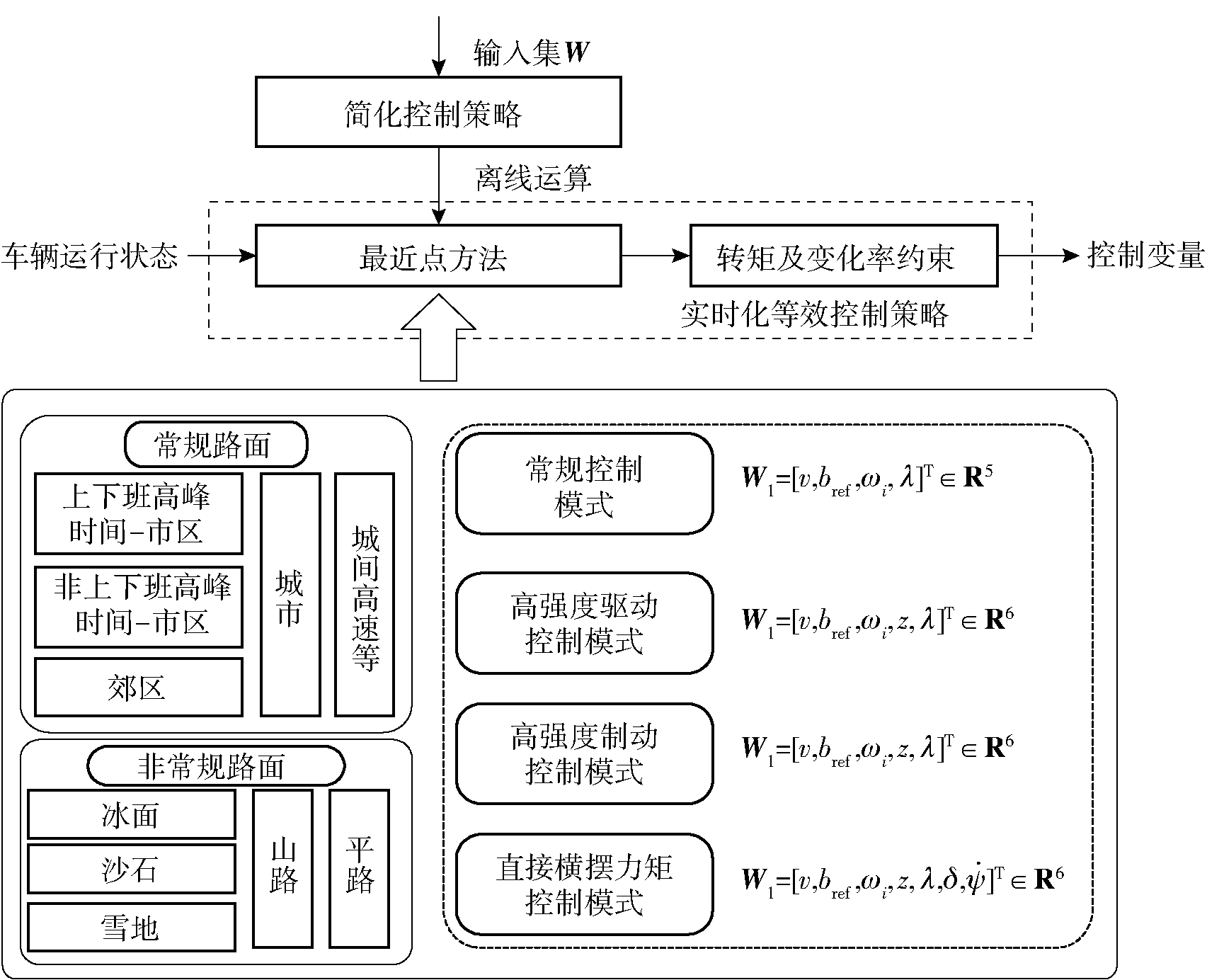
图10 等效控制策略结构图
Fig.10 Equivalent control strategy

图11 循环工况实车试验图
Fig.11 Real vehicle test-Chinese automobile driving cycle
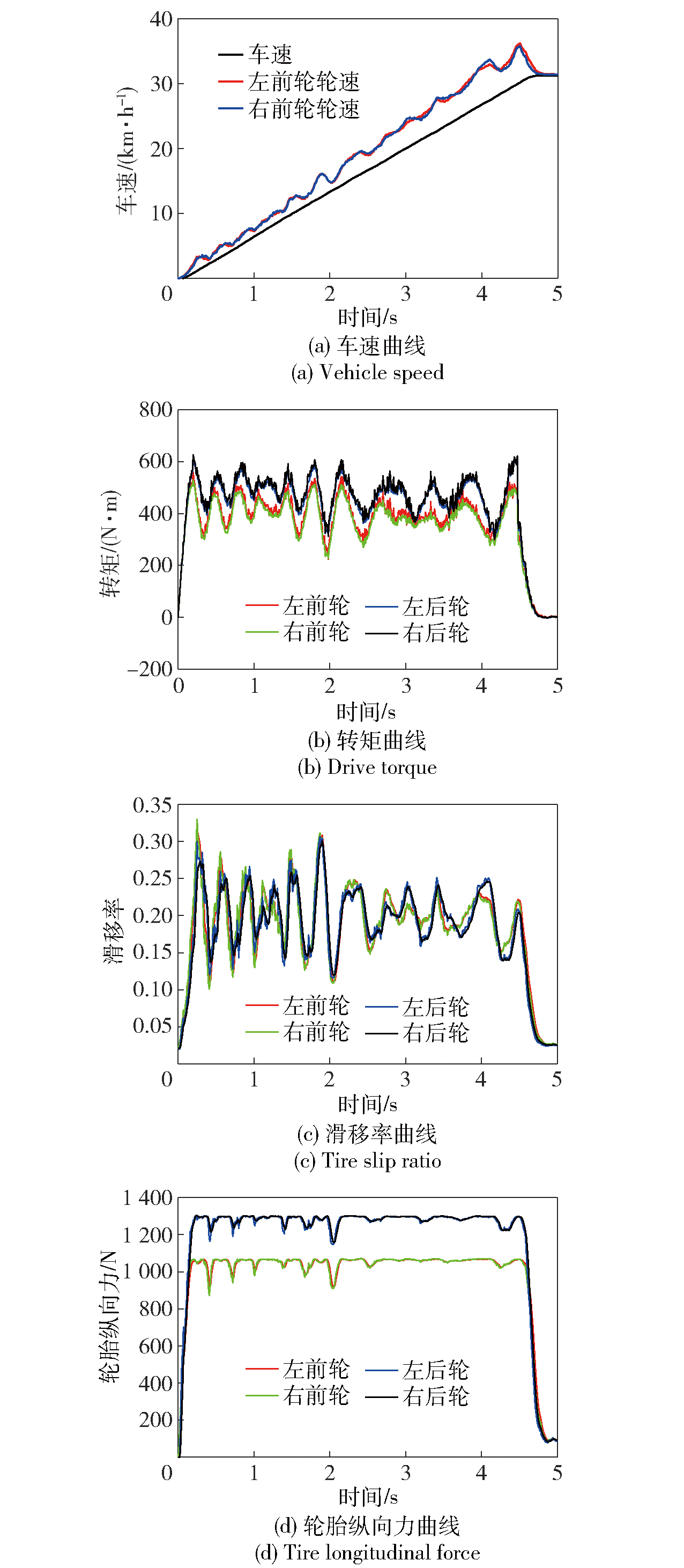
图12 加速工况实车试验图
Fig.12 Real vehicle test-acceleration condition
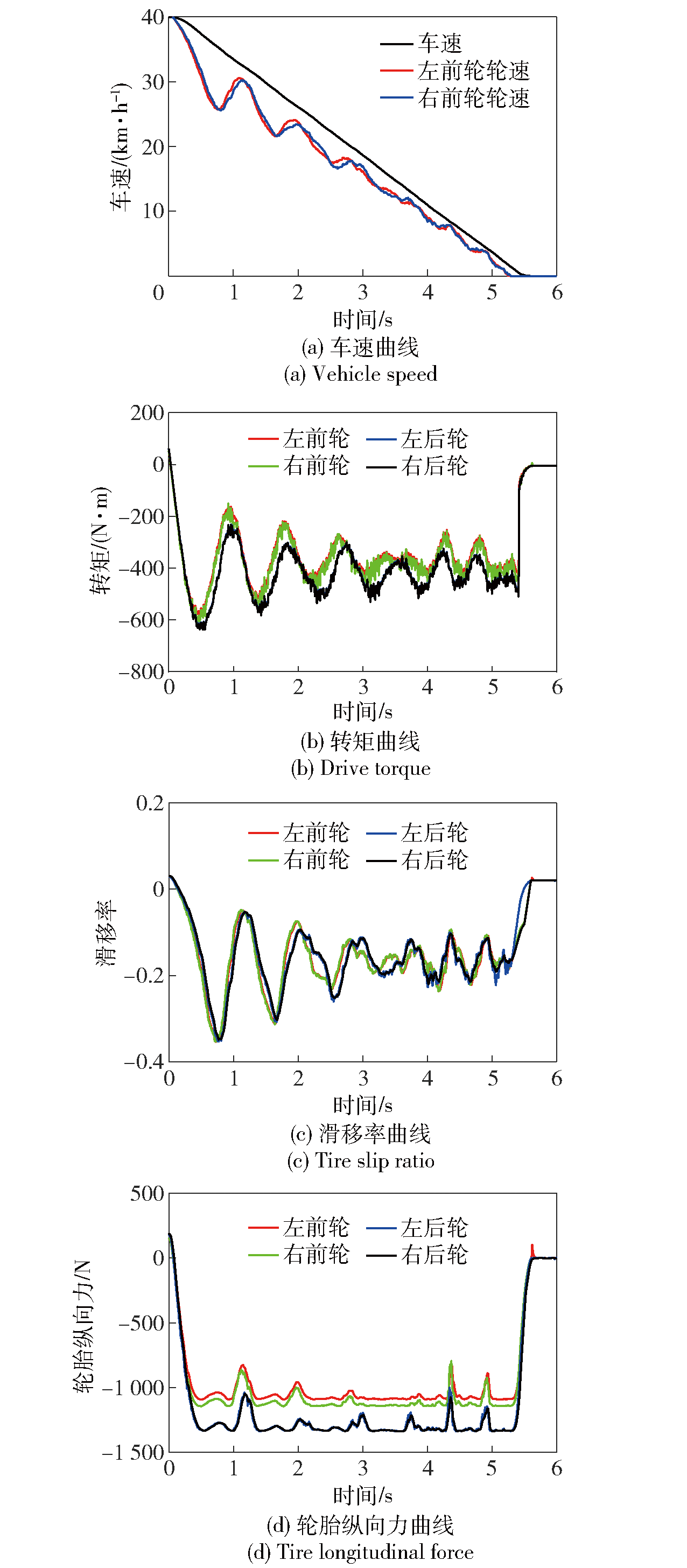
图13 紧急制动工况实车试验图
Fig.13 Real vehicle test-braking condition
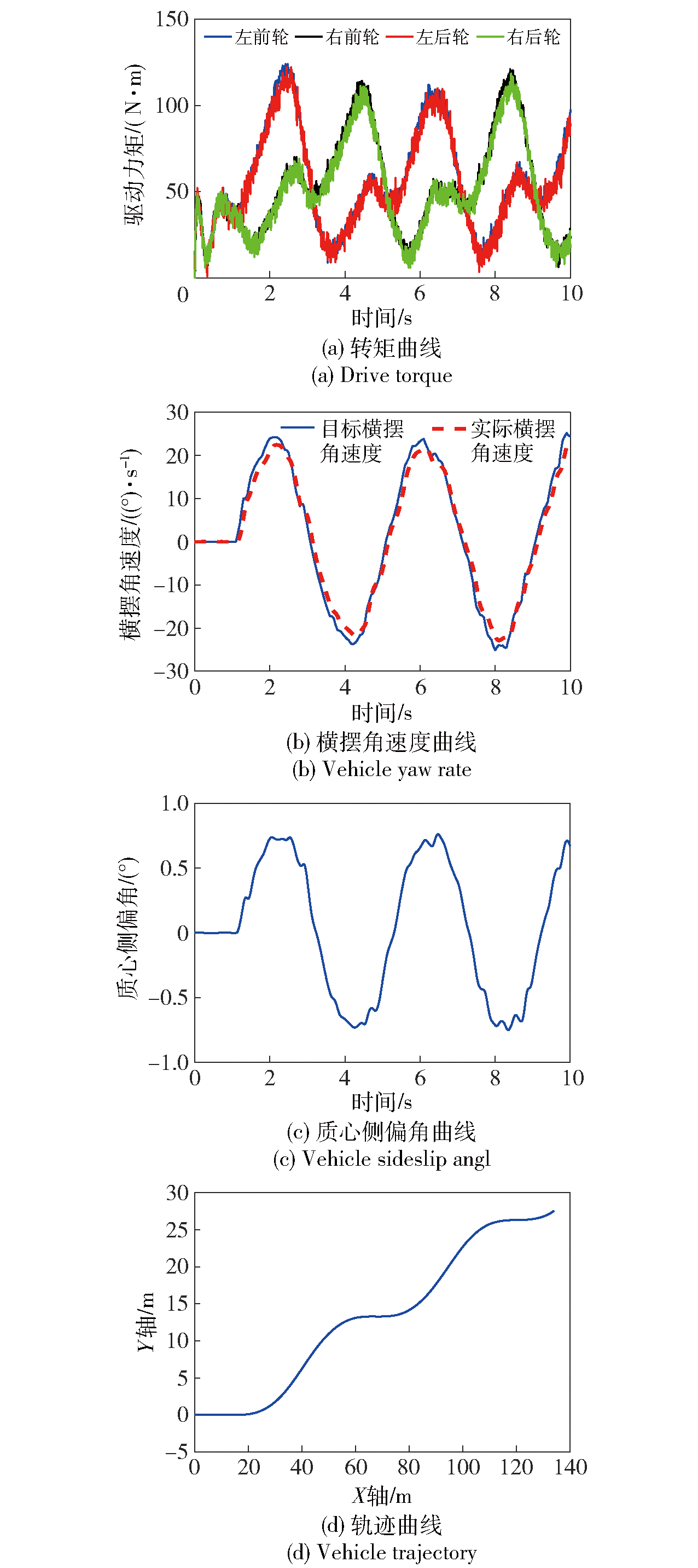
图14 正弦转向实车试验图
Fig.14 Real vehicle test-sinusoidal steering condition
| [1] |
张渊博, 王伟达, 张华, 等. 基于新型改进遗传算法的混合动力客车高效制动能量回收预测控制策略研究[J]. 机械工程学报, 2020, 56(18):105-115.
doi: 10.3901/JME.2020.18.105 |
|
doi: 10.3901/JME.2020.18.105 |
|
| [2] |
doi: 10.1080/00423114.2015.1028414 URL |
| [3] |
doi: 10.3901/CJME.2015.0318.033 URL |
| [4] |
马可. 四轮驱动电动车纵向动力学控制[D]. 北京: 清华大学, 2011.
|
|
|
|
| [5] |
|
| [6] |
朱元, 武四辈, 吴志红, 等. 电动汽车用内置式永磁同步电动机精确转矩控制方法[J]. 农业机械学报, 2014, 45(1):8-13.
|
|
|
|
| [7] |
doi: 10.1080/00423114.2012.666357 URL |
| [8] |
|
| [9] |
|
| [10] |
doi: 10.4271/2015-01-2846 URL |
| [11] |
doi: 10.6113/JPE.2015.15.5.1244 URL |
| [12] |
|
| [13] |
doi: 10.1007/s12239-015-0096-0 URL |
| [14] |
doi: 10.1177/0954407014564780 URL |
| [15] |
doi: 10.1002/asjc.v18.1 URL |
| [16] |
doi: 10.1002/asjc.v18.1 URL |
| [17] |
doi: 10.1049/cth2.v9.18 URL |
| [18] |
doi: 10.1080/00423114.2015.1012212 URL |
| [19] |
高晓杰, 余卓平, 张立军. 集成底盘控制系统的控制构架研究[J]. 汽车工程, 2007, 29(1):21-25.
|
|
|
|
| [20] |
朱冰, 李幼德, 赵健, 等. 基于多变量频域控制方法的车辆底盘集成控制[J]. 农业机械学报, 2010, 41 (1): 14-18.
|
|
|
|
| [21] |
牛礼民, 陈龙, 赵又群, 等. 车辆底盘集成控制系统的电动机控制[J]. 农业机械学报, 2008, 39(12):27-30, 44.
|
|
|
|
| [22] |
刘聪, 刘辉, 韩立金, 等. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10):2102-2113.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.006 |
|
| [23] |
蔡立春, 廖自力, 李嘉麒, 等. 8×8分布式电驱动装甲车辆稳定性直接横摆力矩与转矩矢量控制[J]. 兵工学报, 2021, 42(10):2196-2205.
doi: 10.3969/j.issn.1000-1093.2021.10.015 |
|
doi: 10.3969/j.issn.1000-1093.2021.10.015 |
|
| [24] |
doi: 10.1080/00423114.2020.1845387 URL |
| [25] |
doi: 10.1016/j.automatica.2008.06.015 URL |
| [26] |
doi: 10.1016/j.conengprac.2010.03.002 URL |
| [27] |
|
| [1] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [2] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [3] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [4] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [5] | 王磊, 徐超, 李淼, 赵慧武. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8): 2224-2232. |
| [6] | 范博洋, 赵高鹏, 薄煜明, 吴祥. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575. |
| [7] | 陈美杉, 刘赢, 曾维贵, 钱坤. 空射诱饵弹干扰资源动态分配策略[J]. 兵工学报, 2023, 44(5): 1443-1455. |
| [8] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [9] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [10] | 蒋岩, 丁语嫣, 张兴龙, 徐昕. 基于模型预测与策略学习的智能车辆人机协同控制算法[J]. 兵工学报, 2023, 44(11): 3465-3477. |
| [11] | 周球, 周悦, 孙洪鸣, 郭威, 吴凯, 兰彦军. 深海着陆车路径规划及跟踪控制方法[J]. 兵工学报, 2023, 44(1): 298-306. |
| [12] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [13] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [14] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [15] | 郭志明, 王迪, 庞婷, 李娟, 赵丹, 杨建新. 面向装备体系联合检验的指数分布定时截尾方案优化研究[J]. 兵工学报, 2022, 43(S1): 203-207. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4