
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (12): 4295-4310.doi: 10.12382/bgxb.2023.1064
陈刚1, 王国新1, 明振军1,*( ), 陈旺2, 商曦文2, 阎艳1
), 陈旺2, 商曦文2, 阎艳1
收稿日期:2023-10-31
上线日期:2024-01-30
通讯作者:
基金资助:
CHEN Gang1, WANG Guoxin1, MING Zhenjun1,*(), CHEN Wang2, SHANG Xiwen2, YAN Yan1
Received:2023-10-31
Online:2024-01-30
摘要:
针对装甲车辆运动状态复杂性、战场态势不确定性、战术迷惑和欺骗性导致装甲车辆集群运动轨迹难以准确预测的问题,提出一种基于密度的空间聚类应用(Density-Based Spatial Clustering of Applications with Noise,DBSCAN)和长短时记忆(Long Short Term Memory,LSTM)神经网络的装甲车辆集群轨迹预测方法。根据装甲车辆的斜坡上行驶、转向和车-车交互行驶状态,建立运动学模型。选取机动特征、环境特征和车-车交互特征等轨迹特征信息,基于双层LSTM网络预测单个装甲车辆的轨迹。基于DBSCAN算法将多条单装预测轨迹进行分段、相似度计算和聚类,获得集群代表轨迹作为装甲车辆集群的预测轨迹。仿真结果表明,所提方法能够有效预测装甲车辆集群轨迹,实现料敌于先、谋敌于前。
中图分类号:
陈刚, 王国新, 明振军, 陈旺, 商曦文, 阎艳. 基于DBSCAN聚类和LSTM网络的装甲车辆集群轨迹预测方法[J]. 兵工学报, 2024, 45(12): 4295-4310.
CHEN Gang, WANG Guoxin, MING Zhenjun, CHEN Wang, SHANG Xiwen, YAN Yan. Armored Vehicle Cluster Trajectory Prediction Method Based on DBSCAN Clustering Algorithm and LSTM Network[J]. Acta Armamentarii, 2024, 45(12): 4295-4310.
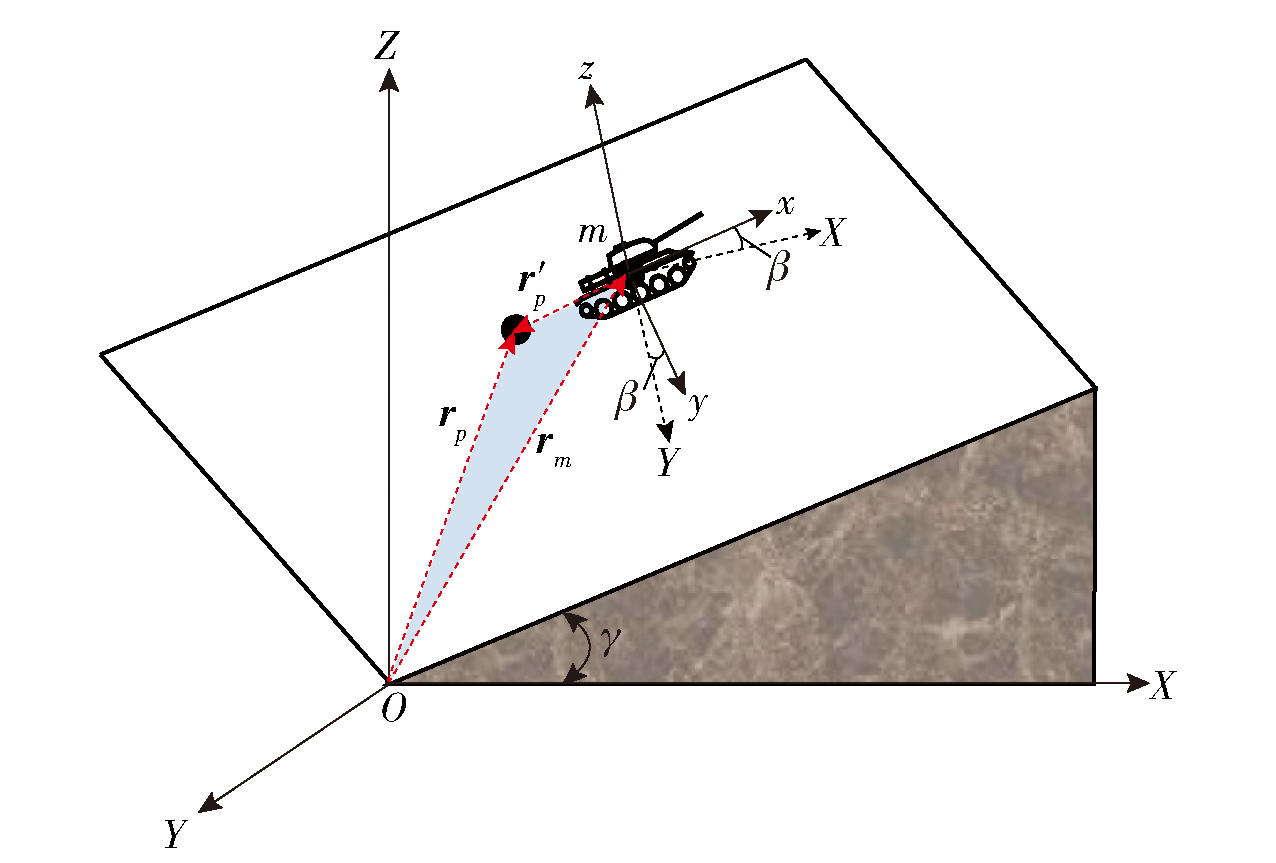
图1 坐标系定义
Fig.1 Definition of coordinate system
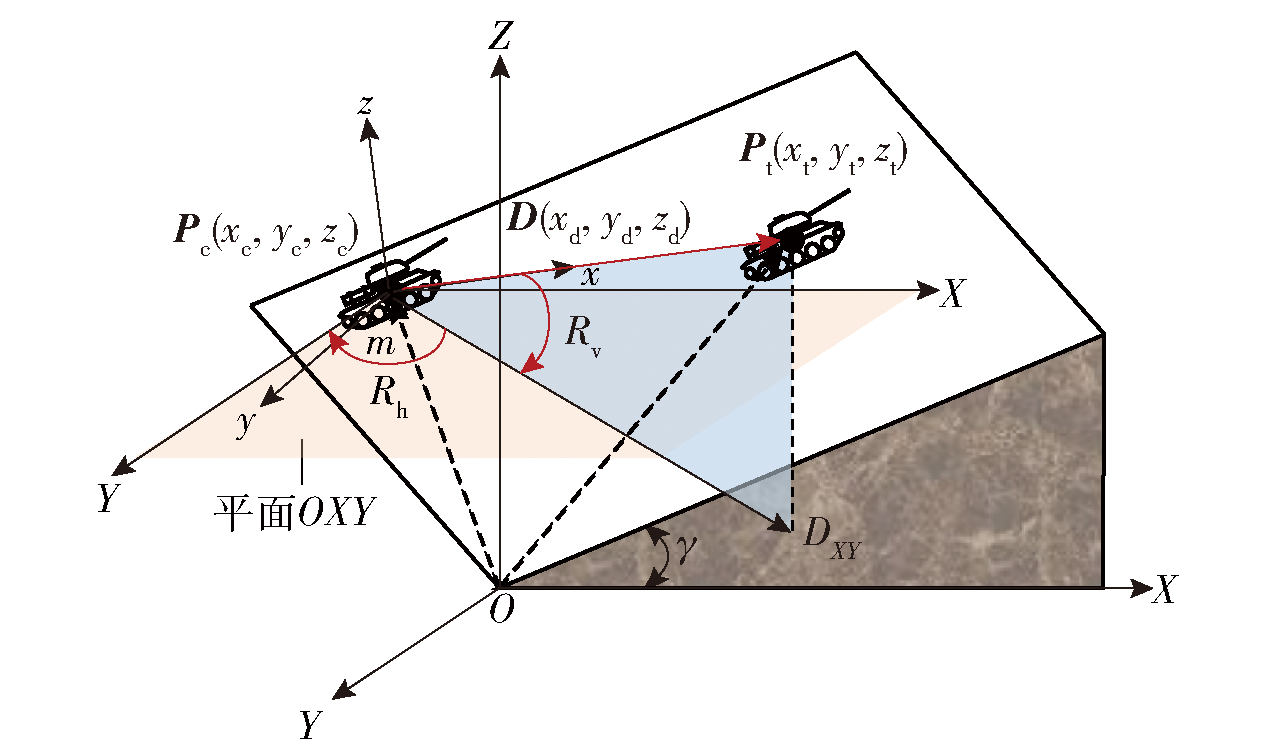
图2 装甲车辆斜坡上行驶状态
Fig.2 Armored vehicle driving on a slope
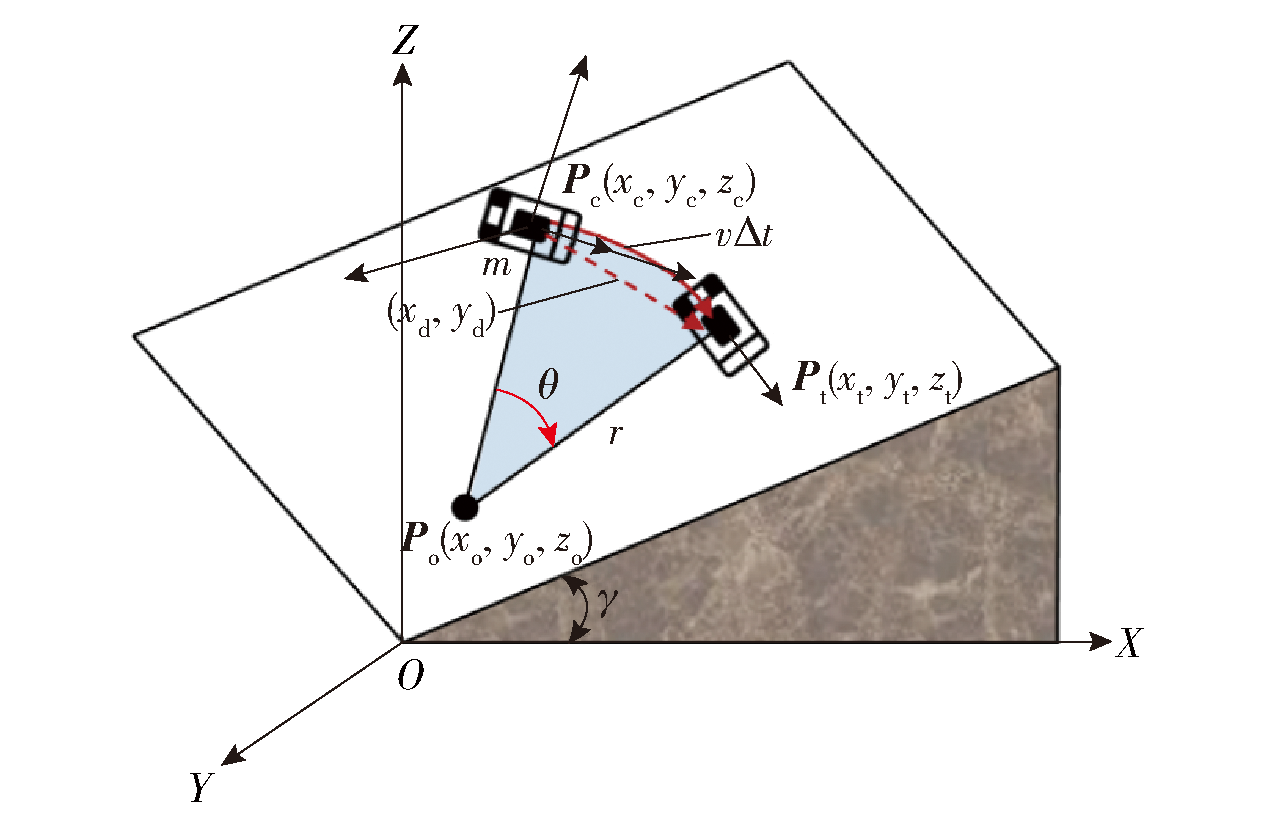
图3 装甲车辆斜坡上转向状态
Fig.3 Armored vehicle turning on a slope

图4 车-车交互行驶状态
Fig.4 Vehicle-to-vehicle interaction state
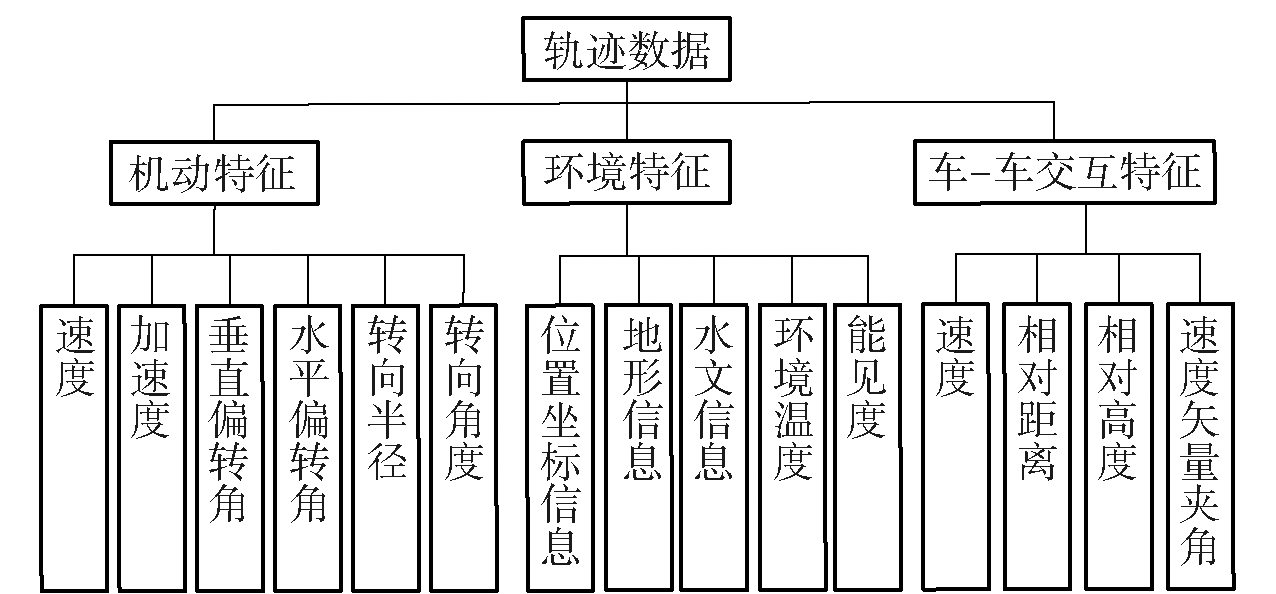
图5 装甲车辆轨迹数据特征信息
Fig.5 Feature information of armored vehicle trajectory data
| 特征类型 | 类型特征取值 | 编码 |
|---|---|---|
| 平地 | 100 | |
| 地形信息 | 丘陵 | 010 |
| 高山 | 001 | |
| 湖泊 | 100 | |
| 水文信息 | 沼泽 | 010 |
| 江河 | 001 |
表1 特征信息编码
Table 1 Feature information coding
| 特征类型 | 类型特征取值 | 编码 |
|---|---|---|
| 平地 | 100 | |
| 地形信息 | 丘陵 | 010 |
| 高山 | 001 | |
| 湖泊 | 100 | |
| 水文信息 | 沼泽 | 010 |
| 江河 | 001 |
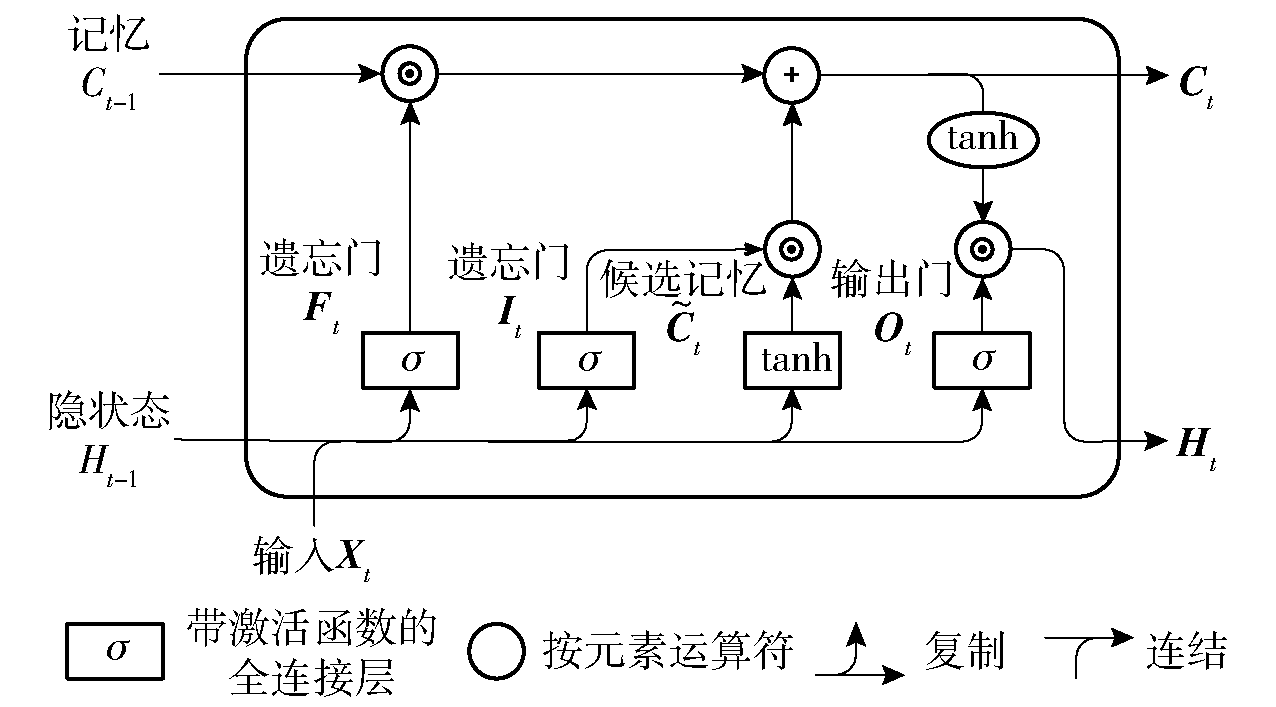
图6 LSTM网络单元结构
Fig.6 LSTM network unit structure
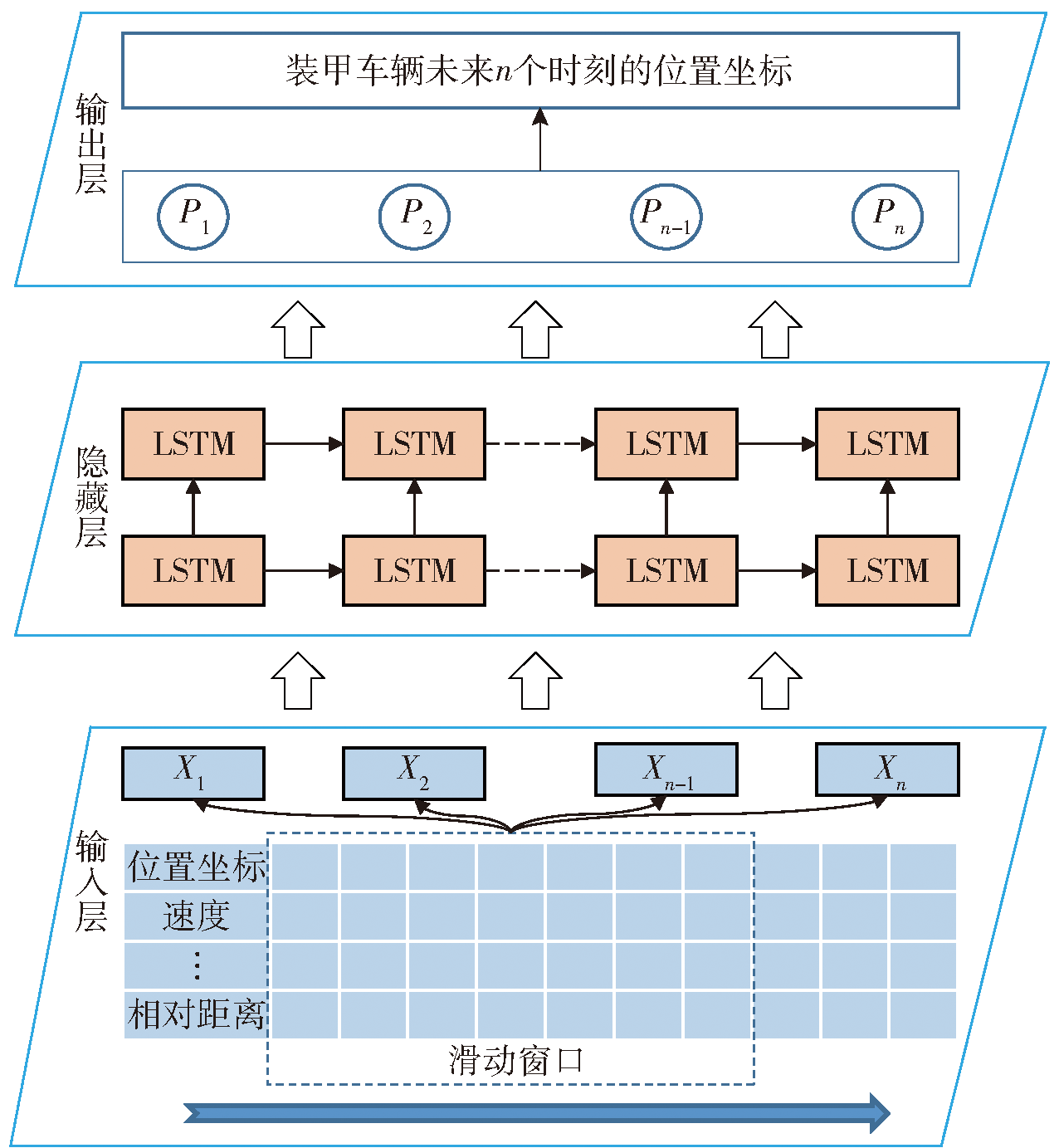
图7 单装轨迹预测模型
Fig.7 Single armored vehicle trajectory prediction model
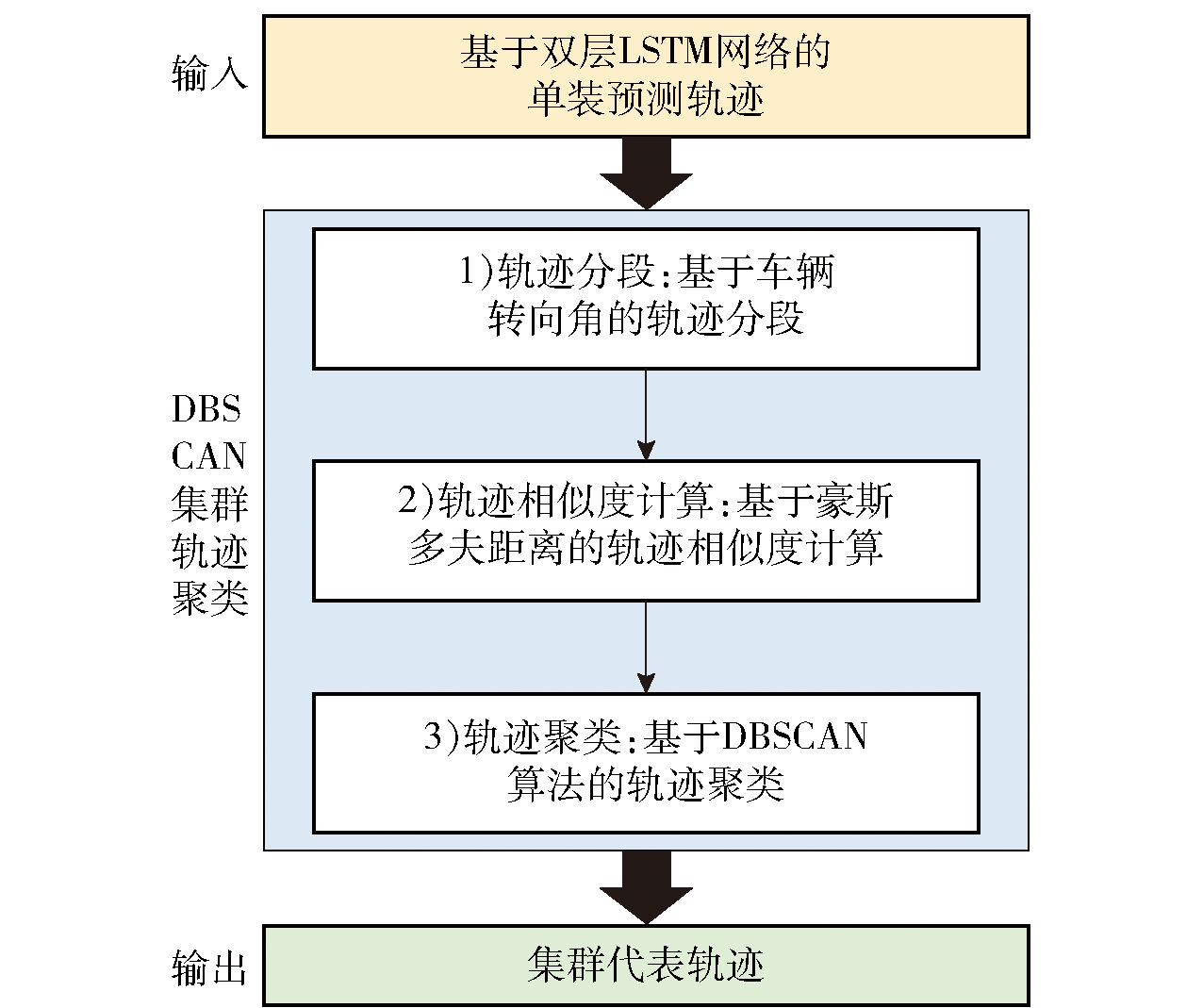
图8 装甲车辆集群轨迹聚类方法流程
Fig.8 Flowchart of armored vehicle cluster trajectory clustering method

图9 车辆转向角
Fig.9 Vehicle steering angle
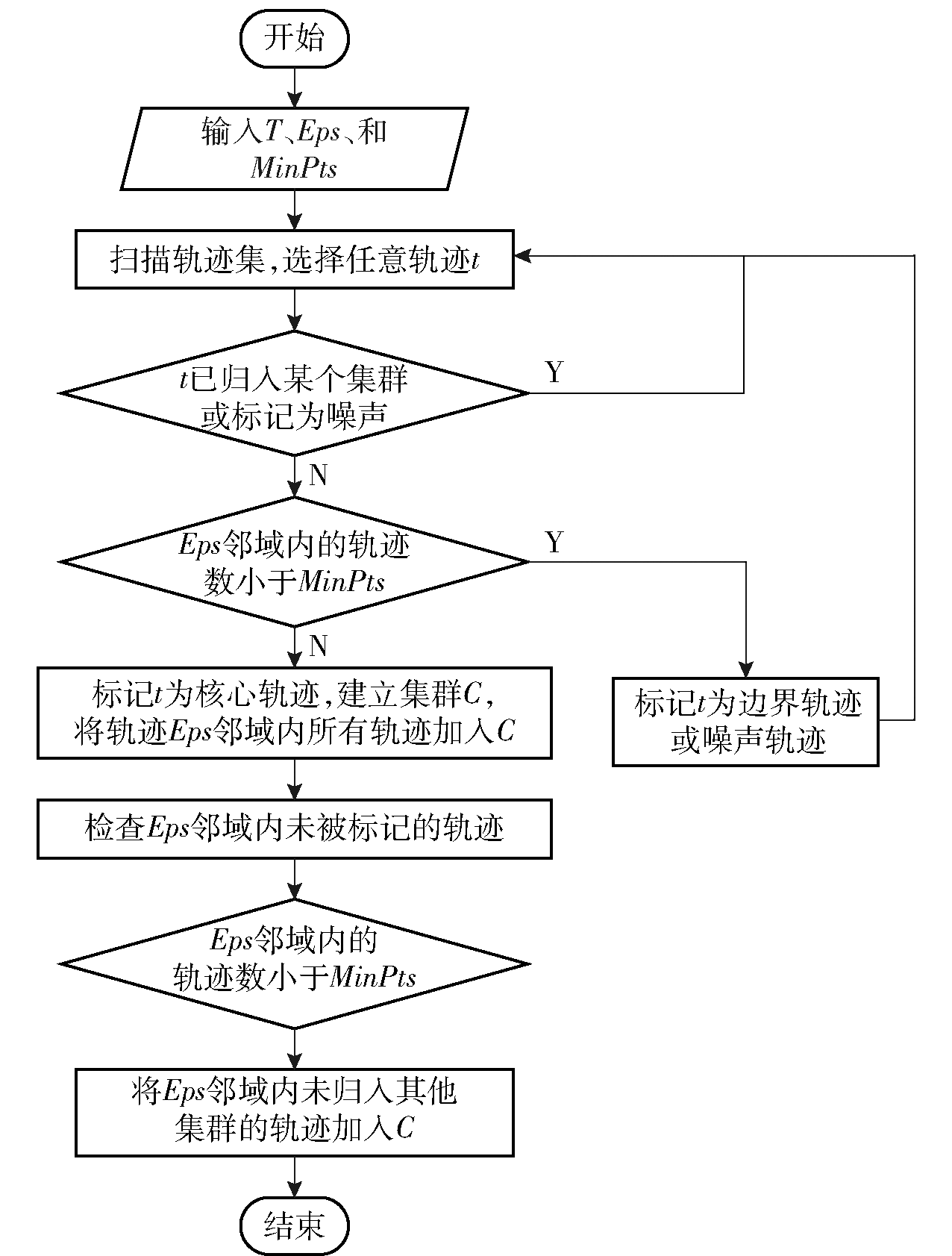
图10 基于DBSCAN的轨迹聚类算法流程图
Fig.10 Flowchart of DBSCAN-based trajectory clustering algorithm
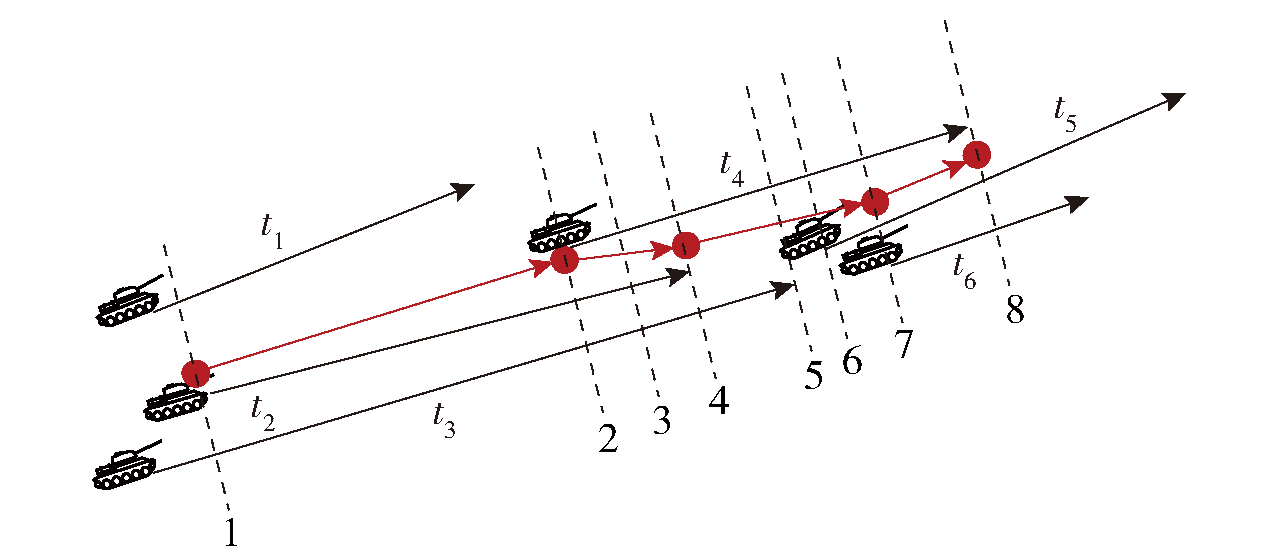
图11 装甲车辆集群代表轨迹示意图
Fig.11 Schematic diagram of armored vehicle cluster representative trajectory
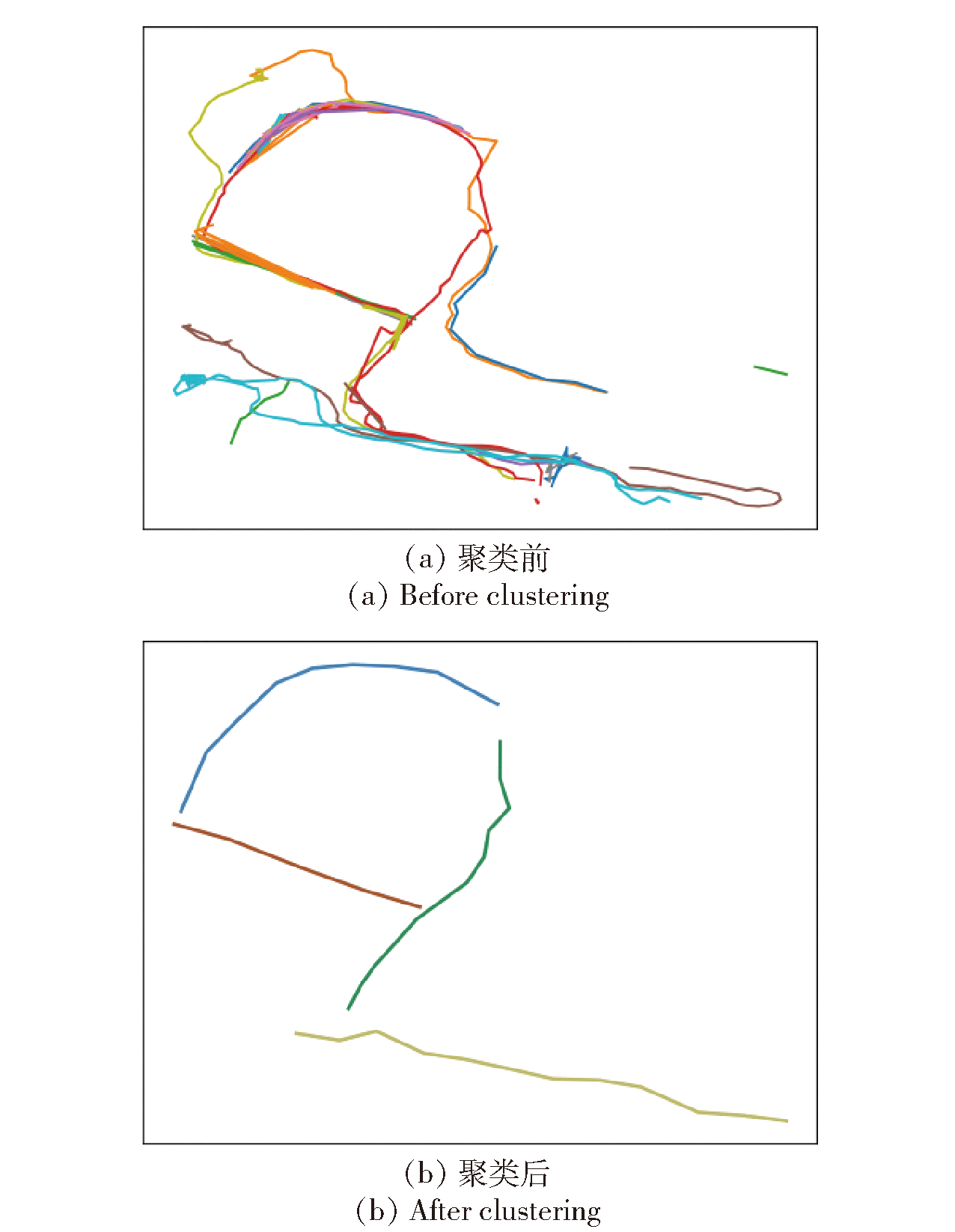
图12 集群轨迹聚类示例
Fig.12 Example of trajectory clustering
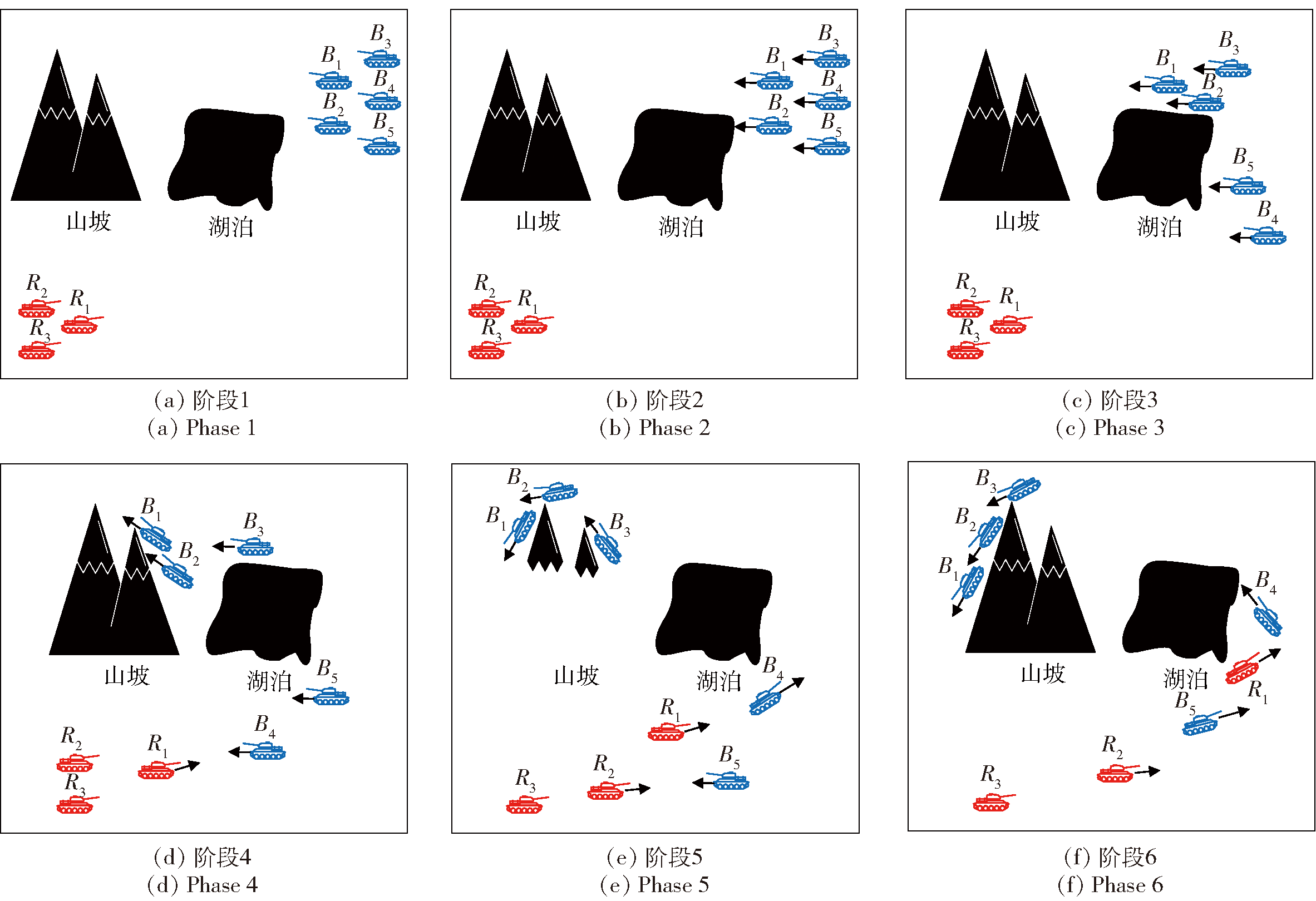
图13 装甲车辆群(组)红蓝对抗过程运动示意图
Fig.13 Movement of armored vehicle group in a red-blue confrontation process
| 样本 点 | 速度/ (km·h-1) | 加速度/ (km·h-2) | 垂直 偏转 角/ (°) | 水平 偏转 角/ (°) | 转向 半径/ km | 转向 角度/ (°) | 经度/ (°) | 纬度/ (°) | 高度/ m | 地形 信息 | 水文 信息 | 气温/ ℃ | 能见 度 | 相对 距离/ km | 相对 高度/ m | 速度 矢量 夹角/ (°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0 | 0 | -43.4 | 0 | 0 | 121.28 | 25.03 | 85.58 | 100 | 000 | 25.2 | 2 | 0 | 0 | 0 |
| 2 | 20 | 0 | 0 | -43.3 | 0 | 0 | 121.28 | 25.03 | 85. 89 | 100 | 000 | 25.3 | 2 | 0 | 0 | 0 |
| 3 | 20 | 0 | 0 | -43.8 | 0 | 0 | 121.28 | 25.03 | 85.07 | 100 | 000 | 25.1 | 2 | 0 | 0 | 0 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 1399 | 36 | 0.4 | 15.6 | 23.4 | 20 | 12.2 | 121.31 | 25.06 | 116.01 | 100 | 100 | 25.5 | 2 | 4.3 | 20.8 | 38.2 |
| 1400 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.44 | 100 | 100 | 24.8 | 1 | 4.5 | 21.5 | 37.4 |
| 1401 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.51 | 100 | 100 | 24.8 | 1 | 4.5 | 21.9 | 37.4 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 2798 | 40 | 0.5 | 10.4 | 24.8 | 20 | -8.6 | 121.33 | 25.09 | 127.03 | 001 | 000 | 24.9 | 1 | 5.9 | 45.6 | 15.2 |
| 2799 | 40 | 0.5 | 10.6 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.15 | 001 | 000 | 24.2 | 2 | 6.2 | 45.9 | 16.8 |
| 2800 | 40 | 0.5 | 10.8 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.27 | 001 | 000 | 24.2 | 2 | 6.4 | 46.8 | 16.5 |
表2 仿真实验数据
Table 2 Simulation experimental data
| 样本 点 | 速度/ (km·h-1) | 加速度/ (km·h-2) | 垂直 偏转 角/ (°) | 水平 偏转 角/ (°) | 转向 半径/ km | 转向 角度/ (°) | 经度/ (°) | 纬度/ (°) | 高度/ m | 地形 信息 | 水文 信息 | 气温/ ℃ | 能见 度 | 相对 距离/ km | 相对 高度/ m | 速度 矢量 夹角/ (°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 20 | 0 | 0 | -43.4 | 0 | 0 | 121.28 | 25.03 | 85.58 | 100 | 000 | 25.2 | 2 | 0 | 0 | 0 |
| 2 | 20 | 0 | 0 | -43.3 | 0 | 0 | 121.28 | 25.03 | 85. 89 | 100 | 000 | 25.3 | 2 | 0 | 0 | 0 |
| 3 | 20 | 0 | 0 | -43.8 | 0 | 0 | 121.28 | 25.03 | 85.07 | 100 | 000 | 25.1 | 2 | 0 | 0 | 0 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 1399 | 36 | 0.4 | 15.6 | 23.4 | 20 | 12.2 | 121.31 | 25.06 | 116.01 | 100 | 100 | 25.5 | 2 | 4.3 | 20.8 | 38.2 |
| 1400 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.44 | 100 | 100 | 24.8 | 1 | 4.5 | 21.5 | 37.4 |
| 1401 | 36 | 0.4 | 15.8 | 24.6 | 20 | 13.5 | 121.31 | 25.06 | 116.51 | 100 | 100 | 24.8 | 1 | 4.5 | 21.9 | 37.4 |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| 2798 | 40 | 0.5 | 10.4 | 24.8 | 20 | -8.6 | 121.33 | 25.09 | 127.03 | 001 | 000 | 24.9 | 1 | 5.9 | 45.6 | 15.2 |
| 2799 | 40 | 0.5 | 10.6 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.15 | 001 | 000 | 24.2 | 2 | 6.2 | 45.9 | 16.8 |
| 2800 | 40 | 0.5 | 10.8 | 25.2 | 20 | -8.9 | 121.33 | 25.09 | 127.27 | 001 | 000 | 24.2 | 2 | 6.4 | 46.8 | 16.5 |
| 数据集 | 轨迹 数量 | 位置点 数量 | 子轨迹 数量 | 输入向量 维度 | 输出向量 维度 |
|---|---|---|---|---|---|
| 训练集 | 240 | 2000 | 474240 | 20×20 | 5×3 |
| 验证集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 测试集 | 240 | 400 | 90240 | 20×20 | 5×3 |
表3 数据集特征
Table 3 Characteristics of the dataset
| 数据集 | 轨迹 数量 | 位置点 数量 | 子轨迹 数量 | 输入向量 维度 | 输出向量 维度 |
|---|---|---|---|---|---|
| 训练集 | 240 | 2000 | 474240 | 20×20 | 5×3 |
| 验证集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 测试集 | 240 | 400 | 90240 | 20×20 | 5×3 |
| 参数 | 数值 |
|---|---|
| 输入维度 | (Batch, 20, 20) |
| 输出维度 | (Batch, 5, 3) |
| Batch | 64 |
| LSTM层数 | 2 |
| 嵌入层维度 | 64 |
| 隐藏层维度 | 128 |
| 初始学习率 | 0.01 |
| 训练周期 | 500 |
| Dropout率 | 0.2 |
| 梯度裁剪范围 | (-5, 5) |
| 优化器 | Adam |
| 激活函数 | ReLU |
表4 模型参数
Table 4 Model parameters
| 参数 | 数值 |
|---|---|
| 输入维度 | (Batch, 20, 20) |
| 输出维度 | (Batch, 5, 3) |
| Batch | 64 |
| LSTM层数 | 2 |
| 嵌入层维度 | 64 |
| 隐藏层维度 | 128 |
| 初始学习率 | 0.01 |
| 训练周期 | 500 |
| Dropout率 | 0.2 |
| 梯度裁剪范围 | (-5, 5) |
| 优化器 | Adam |
| 激活函数 | ReLU |
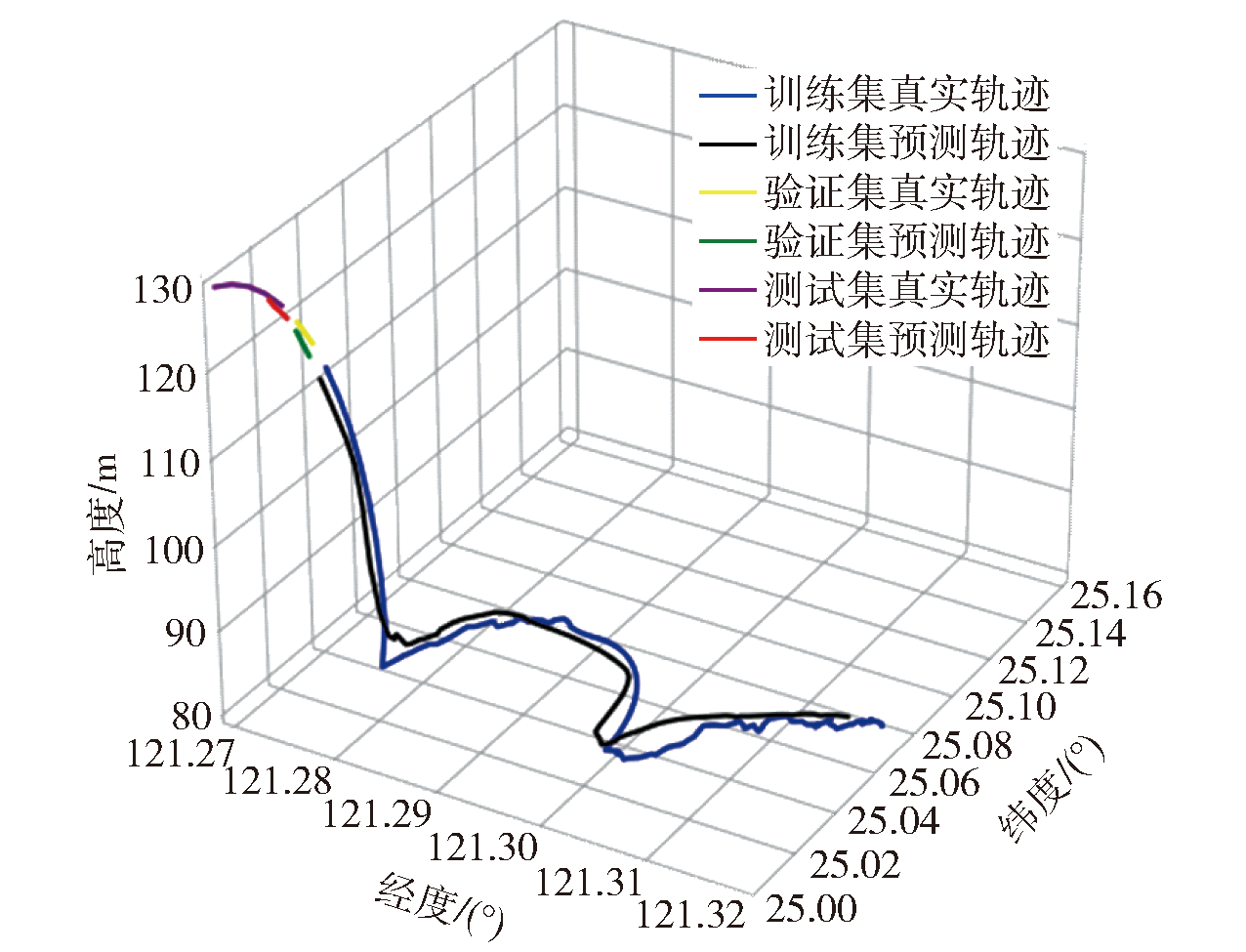
图14 装甲车辆B1三维轨迹预测结果
Fig.14 3D trajectory predicted result of armored vehicle B1
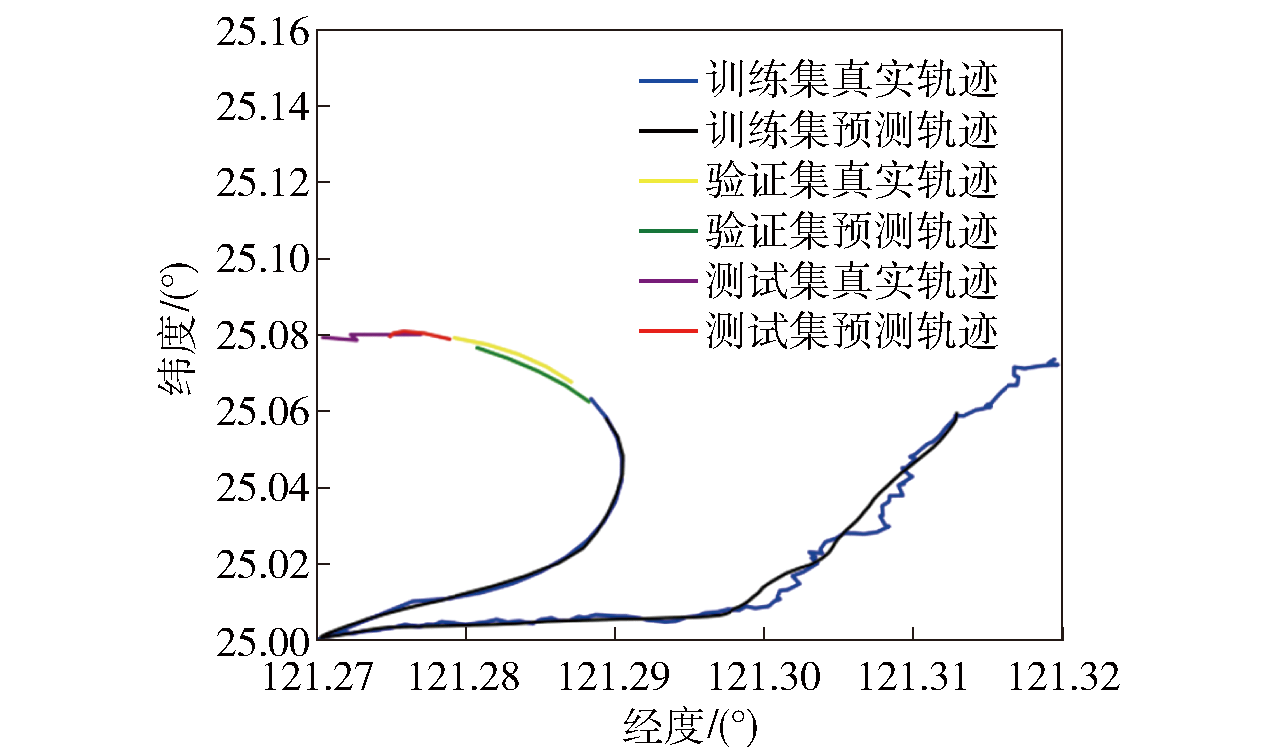
图15 装甲车辆B4二维轨迹预测结果
Fig.15 2D trajectory predicted result of armored vehicle B4
| 仿真 次数 | 指标 | BP神经 网络 | RNN | 单层 LSTM | 双层 LSTM |
|---|---|---|---|---|---|
| MAE | 25.28 | 8.83 | 3.19 | 1.65 | |
| 1 | RMSE | 4.86 | 3.25 | 1.87 | 0.91 |
| TIME | 0.028 | 0.072 | 0.121 | 0.183 | |
| MAE | 26.53 | 8.07 | 3.34 | 1.61 | |
| 2 | RMSE | 5.23 | 2.98 | 1.72 | 0.85 |
| TIME | 0.023 | 0.063 | 0.112 | 0.174 | |
| MAE | 26.44 | 8.45 | 3.23 | 1.54 | |
| 3 | RMSE | 5.12 | 3.01 | 1.75 | 0.77 |
| TIME | 0.025 | 0.067 | 0.117 | 0.181 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 26.04 | 8.28 | 3.21 | 1.60 | |
| 14 | RMSE | 5.29 | 3.11 | 1.83 | 0.85 |
| TIME | 0.020 | 0.061 | 0.107 | 0.173 | |
| MAE | 24.67 | 7.91 | 3.08 | 1.53 | |
| 15 | RMSE | 4.79 | 3.12 | 1.85 | 0.81 |
| TIME | 0.027 | 0.067 | 0.118 | 0.183 | |
| MAE | 27.26 | 8.12 | 3.12 | 1.57 | |
| 16 | RMSE | 5.14 | 3.08 | 1.90 | 0.79 |
| TIME | 0.028 | 0.069 | 0.120 | 0.185 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 25.73 | 8.25 | 3.23 | 1.56 | |
| 28 | RMSE | 5.11 | 3.13 | 1.79 | 0.87 |
| TIME | 0.019 | 0.059 | 0.109 | 0.169 | |
| MAE | 25.34 | 7.75 | 3.36 | 1.66 | |
| 29 | RMSE | 5.32 | 2.87 | 1.77 | 0.86 |
| TIME | 0.021 | 0.063 | 0.115 | 0.175 | |
| MAE | 27.07 | 8.70 | 3.31 | 1.55 | |
| 30 | RMSE | 5.07 | 3.09 | 1.70 | 0.84 |
| TIME | 0.023 | 0.071 | 0.121 | 0.172 | |
| MAE | 25.69 | 8.31 | 3.26 | 1.58 | |
| 平均 | RMSE | 5.07 | 3.06 | 1.81 | 0.83 |
| TIME | 0.024 | 0.065 | 0.114 | 0.178 |
表5 模型对比结果
Table 5 Model comparison results
| 仿真 次数 | 指标 | BP神经 网络 | RNN | 单层 LSTM | 双层 LSTM |
|---|---|---|---|---|---|
| MAE | 25.28 | 8.83 | 3.19 | 1.65 | |
| 1 | RMSE | 4.86 | 3.25 | 1.87 | 0.91 |
| TIME | 0.028 | 0.072 | 0.121 | 0.183 | |
| MAE | 26.53 | 8.07 | 3.34 | 1.61 | |
| 2 | RMSE | 5.23 | 2.98 | 1.72 | 0.85 |
| TIME | 0.023 | 0.063 | 0.112 | 0.174 | |
| MAE | 26.44 | 8.45 | 3.23 | 1.54 | |
| 3 | RMSE | 5.12 | 3.01 | 1.75 | 0.77 |
| TIME | 0.025 | 0.067 | 0.117 | 0.181 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 26.04 | 8.28 | 3.21 | 1.60 | |
| 14 | RMSE | 5.29 | 3.11 | 1.83 | 0.85 |
| TIME | 0.020 | 0.061 | 0.107 | 0.173 | |
| MAE | 24.67 | 7.91 | 3.08 | 1.53 | |
| 15 | RMSE | 4.79 | 3.12 | 1.85 | 0.81 |
| TIME | 0.027 | 0.067 | 0.118 | 0.183 | |
| MAE | 27.26 | 8.12 | 3.12 | 1.57 | |
| 16 | RMSE | 5.14 | 3.08 | 1.90 | 0.79 |
| TIME | 0.028 | 0.069 | 0.120 | 0.185 | |
| ︙ | ︙ | ︙ | ︙ | ︙ | ︙ |
| MAE | 25.73 | 8.25 | 3.23 | 1.56 | |
| 28 | RMSE | 5.11 | 3.13 | 1.79 | 0.87 |
| TIME | 0.019 | 0.059 | 0.109 | 0.169 | |
| MAE | 25.34 | 7.75 | 3.36 | 1.66 | |
| 29 | RMSE | 5.32 | 2.87 | 1.77 | 0.86 |
| TIME | 0.021 | 0.063 | 0.115 | 0.175 | |
| MAE | 27.07 | 8.70 | 3.31 | 1.55 | |
| 30 | RMSE | 5.07 | 3.09 | 1.70 | 0.84 |
| TIME | 0.023 | 0.071 | 0.121 | 0.172 | |
| MAE | 25.69 | 8.31 | 3.26 | 1.58 | |
| 平均 | RMSE | 5.07 | 3.06 | 1.81 | 0.83 |
| TIME | 0.024 | 0.065 | 0.114 | 0.178 |
| 超参数 | 取值 |
|---|---|
| Eps | 1,5,10,15,20,25 |
| MinPts | 2,3,4,5 |
表6 超参数取值
Table 6 Hyperparameter values
| 超参数 | 取值 |
|---|---|
| Eps | 1,5,10,15,20,25 |
| MinPts | 2,3,4,5 |
| MinPts | Eps | |||||
|---|---|---|---|---|---|---|
| 1 | 5 | 10 | 15 | 20 | 25 | |
| 2 | 0.129 | 0.688 | 0.739 | 0.715 | 0.699 | 0.721 |
| 3 | 0.141 | 0.523 | 0.645 | 0.577 | 0.554 | 0.632 |
| 4 | 0.109 | 0.317 | 0.559 | 0.468 | 0.324 | 0.511 |
| 5 | 0.032 | 0.047 | 0.069 | 0.091 | 0.121 | 0.152 |
表7 不同超参数组合的模型轮廓系数
Table 7 Model profile coefficients for different combinations of hyperparameters
| MinPts | Eps | |||||
|---|---|---|---|---|---|---|
| 1 | 5 | 10 | 15 | 20 | 25 | |
| 2 | 0.129 | 0.688 | 0.739 | 0.715 | 0.699 | 0.721 |
| 3 | 0.141 | 0.523 | 0.645 | 0.577 | 0.554 | 0.632 |
| 4 | 0.109 | 0.317 | 0.559 | 0.468 | 0.324 | 0.511 |
| 5 | 0.032 | 0.047 | 0.069 | 0.091 | 0.121 | 0.152 |

图16 装甲车辆集群代表轨迹
Fig.16 Representative trajectory of armored vehicle cluster
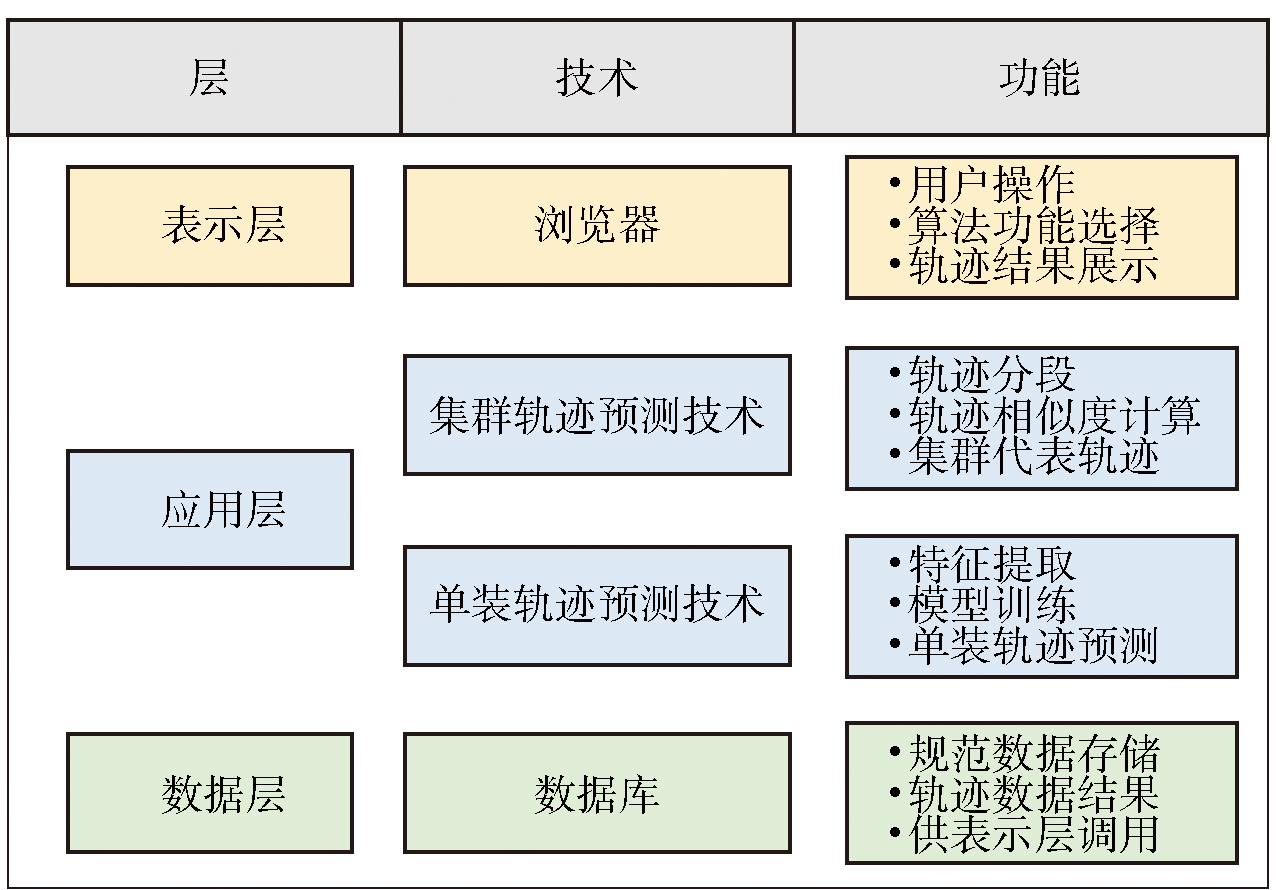
图17 轨迹预测系统架构
Fig.17 Architecture of trajectory prediction system

图18 野外作战想定各阶段集群预测轨迹
Fig.18 Cluster prediction trajectory for each phase of field combat scenario
| [1] |
杜志岐, 唐镜. 基于系统工程的装甲车辆总体设计[J]. 兵工学报, 2022, 43(增刊1): 1-10.
|
|
doi: 10.12382/bgxb.2022.A016 |
|
| [2] |
陈刚, 姚丽亚, 王国新, 等. 面向鲁棒决策的战场态势评估人机共识形成方法[J]. 兵工学报, 2022, 43(11): 2953-2964.
doi: 10.12382/bgxb.2021.0557 |
|
doi: 10.12382/bgxb.2021.0557 |
|
| [3] |
张堃, 杜睿怡, 时昊天, 等. 基于Mogrifier-BiGRU的飞行器轨迹预测[J]. 兵工学报, 2024, 45(2):373-384.
doi: 10.12382/bgxb.2022.0750 |
|
doi: 10.12382/bgxb.2022.0750 |
|
| [4] |
万宜春, 陈志龙, 何昌其, 等. 基于时空和作战编组的兵棋推演系统轨迹聚类算法[J]. 指挥控制与仿真, 2023, 45(1): 108-118.
doi: 10.3969/j.issn.1673-3819.2023.01.018 |
|
|
|
| [5] |
乔少杰, 韩楠, 朱新文, 等. 基于卡尔曼滤波的动态轨迹预测算法[J]. 电子学报, 2018, 46(2): 418-423.
doi: 10.3969/j.issn.0372-2112.2018.02.022 |
|
|
|
| [12] |
唐上钦, 魏政磊, 谢磊, 等. 基于机动单元库的TSO-GRU-Ada机动轨迹预测[J]. 兵工学报, 2022, 43(8): 1913-1925.
|
|
doi: 10.12382/bgxb.2021.0417 |
|
| [13] |
|
| [14] |
张百川, 毕文豪, 张安, 等. 基于Transformer模型的空战飞行器轨迹预测误差补偿方法[J]. 航空学报, 2023, 44(9): 291-304.
|
|
|
|
| [15] |
张永梅, 赖裕平, 马健喆, 等. 基于视频的装甲车和飞机检测跟踪及轨迹预测算法[J]. 兵工学报, 2021, 42(3):545-554.
doi: 10.3969/j.issn.1000-1093.2021.03.010 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.010 |
|
| [16] |
|
| [17] |
连静, 丁荣琪, 李琳辉, 等. 基于图模型和注意力机制的车辆轨迹预测方法[J]. 兵工学报, 2023, 44(7): 2162-2170.
doi: 10.12382/bgxb.2022.0117 |
|
doi: 10.12382/bgxb.2022.0117 |
|
| [18] |
杨春伟, 刘炳琪, 王继平, 等. 基于注意力机制的高超声速飞行器LSTM智能轨迹预测[J]. 兵工学报, 2022, 43(增刊2):78-86.
|
|
doi: 10.12382/bgxb.2022.B002 |
|
| [19] |
郭立威, 王权, 高克斌, 等. 基于虚拟现实的装甲车辆运动仿真研究[J]. 计算机系统应用, 2019, 28(6):221-227.
|
|
|
|
| [20] |
刘妤, 谢铌, 张拓, 等. 履带车辆软坡地面力学建模及行驶性能分析[J]. 机械设计, 2021, 38 (3): 110-118.
|
|
|
|
| [21] |
宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512.
doi: 10.12305/j.issn.1001-506X.2023.02.22 |
|
doi: 10.12305/j.issn.1001-506X.2023.02.22 |
|
| [22] |
|
| [23] |
|
| [24] |
刘钰, 彭鹏菲. 基于改进DBSCAN的船舶轨迹聚类方法研究[J]. 舰船电子工程, 2022, 42(12): 57-63.
|
|
|
|
| [25] |
韩萍, 张启, 石庆研, 等. 基于DBSCAN-GRU算法的终端区4D航迹预测[J]. 信号处理, 2023, 39(3):439-449.
|
|
|
|
| [26] |
杨任农, 岳龙飞, 宋敏, 等. 基于Bi-LSTM的无人机轨迹预测模型及仿真[J]. 航空工程进展, 2020, 11(1):77-84.
|
|
|
|
| [27] |
俞庆英, 赵亚军, 叶梓彤, 等. 基于群组与密度的轨迹聚类算法[J]. 计算机工程, 2021, 47(4): 100-107.
doi: 10.19678/j.issn.1000-3428.0057425 |
|
doi: 10.19678/j.issn.1000-3428.0057425 |
|
| [28] |
杨家轩, 刘元. 基于DBTCAN算法的船舶轨迹聚类与航路识别[J]. 上海海事大学学报, 2022, 43(3):7-12.
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4): 680-688.
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
| [11] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3): 600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [28] |
|
| [29] |
李文杰, 闫世强, 蒋莹, 等. 自适应确定DBSCAN算法参数的算法研究[J]. 计算机工程与应用, 2019, 55(5): 1-7,148.
doi: 10.3778/j.issn.1002-8331.1809-0018 |
|
doi: 10.3778/j.issn.1002-8331.1809-0018 |
|
| [30] |
万佳, 胡大裟, 蒋玉明. 多密度自适应确定DBSCAN算法参数的算法研究[J]. 计算机工程与应用, 2022, 58(2): 78-85.
doi: 10.3778/j.issn.1002-8331.2012-0476 |
|
doi: 10.3778/j.issn.1002-8331.2012-0476 |
| [1] | 熊瑛, 李小健, 范知友, 李楠, 王彪, 王天楠. 装甲车辆大功率电驱动系统传导干扰预测模型构建方法[J]. 兵工学报, 2024, 45(9): 3004-3016. |
| [2] | 杜甫, 董明明, 汪浒江, 赵艳辉, 郑凤杰. 基于准零刚度的坦克装甲车辆半主动惯容悬架控制策略[J]. 兵工学报, 2024, 45(9): 2929-2935. |
| [3] | 岳文斌, 宁功韬, 倪永亮, 宋克岭, 黄煜, 王志远, 李艳明. 坦克装甲车辆电力系统源网荷储协同优化与安全控制:架构设计及前沿思考[J]. 兵工学报, 2024, 45(8): 2463-2477. |
| [4] | 季稳, 李春娜, 贾续毅, 王刚, 龚春林. 结合系统辨识和迁移学习的高速旋转弹气动力建模方法[J]. 兵工学报, 2024, 45(7): 2197-2208. |
| [5] | 刘懿, 任济寰, 吴祥, 薄煜明. 基于集成迁移学习的新装备装甲车辆分类[J]. 兵工学报, 2023, 44(8): 2319-2328. |
| [6] | 孙晓东, 金晓萍, 解芳, 孙厚杰, 郑思涓. 多模态告警和认知负荷对装甲车辆乘员反应的影响[J]. 兵工学报, 2023, 44(4): 972-981. |
| [7] | 高普, 李宏才, 刘辉, 孟杰克. 装甲车辆综合传动装置外接油管系统动态特性分析[J]. 兵工学报, 2023, 44(11): 3447-3454. |
| [8] | 张瑞增, 龚建伟, 陈慧岩, 刘海鸥, 卢佳兴. 硬质路面条件下履带车辆转向模型分析及验证[J]. 兵工学报, 2023, 44(1): 233-246. |
| [9] | 丁伟, 明振军, 王国新, 阎艳. 基于多层次LSTM网络的多智能体攻防效能动态预测模型[J]. 兵工学报, 2023, 44(1): 176-192. |
| [10] | 杜志岐, 唐镜. 基于系统工程的装甲车辆总体设计[J]. 兵工学报, 2022, 43(S1): 1-10. |
| [11] | 熊瑛, 李小健, 周伟, 李楠, 焦美, 李燕, 杜晓琳, 聂秀丽, 纪相普. 装甲车辆三相同步电机宽频电磁兼容模型构建方法[J]. 兵工学报, 2022, 43(7): 1467-1477. |
| [12] | 孙厚杰, 金晓萍, 解芳, 孙晓东, 郑思涓. 长时工作记忆和注意力分配对装甲车辆乘员情景意识的影响[J]. 兵工学报, 2022, 43(11): 2749-2760. |
| [13] | 张永梅, 赖裕平, 马健喆, 冯超, 束颉. 基于视频的装甲车和飞机检测跟踪及轨迹预测算法[J]. 兵工学报, 2021, 42(3): 545-554. |
| [14] | 郭司南, 完颜笑如, 刘双, 梁超然, 陈浩. 智能化设计与信息加工通道复杂度对装甲车乘员脑力负荷的影响[J]. 兵工学报, 2021, 42(2): 234-241. |
| [15] | 廖自力, 疏歆, 高强, 李嘉麒. 电传动装甲车辆母线电压双通道补偿控制[J]. 兵工学报, 2021, 42(10): 2082-2091. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4