
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (7): 2097-2109.doi: 10.12382/bgxb.2023.0305
姬鹏*( ), 郭明皓
), 郭明皓
收稿日期:2023-04-04
上线日期:2023-08-03
通讯作者:
基金资助:
JI Peng*(), GUO Minghao
Received:2023-04-04
Online:2023-08-03
摘要:
人工势场法由于运算量小、精度高,广泛应用于无人车的局部路径规划。针对传统人工势场法存在目标不可达、局部最小值及陷入U型障碍物的问题,提出一种基于Frenet坐标系下改进人工势场法的路径规划算法。构建Frenet坐标系来表述车辆避障运动,简化规划模型,解决路径规划中车辆与所在道路相对位置不易表述的问题。提出安全椭圆模型和预测距离的概念来调整势场影响区域,加入基于Frenet坐标系下的参考线势场及动态速度势场改进斥力场函数,解决车辆在静态和动态下的避障问题。利用数学仿真软件进行仿真,以不同车速在直道和弯道场景中对所提出的路径规划方法进行静态和动态避障仿真实验。研究结果表明:不同车速下的前轮转角、横摆角速度均控制在较小范围内,改进算法可以有效解决传统人工势场法的缺陷,同时与快速搜索随机树(Rapidly-exploring Random Tree,RRT)算法相比,其在避障过程中路径规划计算效率提高了42.8%,改进算法优势明显。
中图分类号:
姬鹏, 郭明皓. 基于Frenet坐标下改进人工势场法的无人车局部路径规划[J]. 兵工学报, 2024, 45(7): 2097-2109.
JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System[J]. Acta Armamentarii, 2024, 45(7): 2097-2109.

图1 Frenet坐标系的建立
Fig.1 Establishment of Frenet coordinate system

图2 笛卡尔坐标下描述路径图(左为车辆在道路上的轨迹描述图,右为车辆轨迹在笛卡尔坐标系下的实际映射图)
Fig.2 Description of path diagram in Cartesian coordinate system(Left:the depiction of vehicle trajectory on the roadway; Right:the actual mapping of vehicle trajectory in Cartesian coordinate system)

图3 Frenet坐标系描述路径图(左为车辆在道路上的轨迹描述图,右为车辆轨迹在Frenet坐标系下实际映射图)
Fig.3 Description of path diagram in Frenet coordinate system(Left: the depiction of vehicle trajectory on the roadway; Right: the actual mapping of vehicle trajectory in Frenet coordinate system)

图4 Frenet坐标系与笛卡尔坐标系的转换关系
Fig.4 Trajectory generation in Frenet coordinate system
| 参数 | 含义 |
|---|---|
| rh/m | 车辆的位置矢量 |
| vh/(m·s-1) | 车辆的速度矢量 |
| ah/(m·s-2) | 车辆的加速度矢量 |
| kh/m-1 | 车的位置在车轨迹上的曲率 |
| τh | 车轨迹切线上的单位向量 |
| nh | 车轨迹法线上的单位向量 |
表1 笛卡尔坐标系各参数及含义
Table 1 The parameters and meanings of Cartesian coordinate system
| 参数 | 含义 |
|---|---|
| rh/m | 车辆的位置矢量 |
| vh/(m·s-1) | 车辆的速度矢量 |
| ah/(m·s-2) | 车辆的加速度矢量 |
| kh/m-1 | 车的位置在车轨迹上的曲率 |
| τh | 车轨迹切线上的单位向量 |
| nh | 车轨迹法线上的单位向量 |
| 参数 | 含义 |
|---|---|
| rr/m | 车辆投影的位置矢量 |
| /(m·s-1) | 纵向速度 |
| /(m·s-2) | 纵向加速度 |
| kr/m-1 | 投影的位置矢量在道路几何上的曲率 |
| /(m·s-1) | 横向速度 |
| /(m·s-2) | 横向加速度 |
| τr | 投影在道路几何上切线的单位向量 |
| nr | 投影在道路几何上法线的单位向量 |
| l' | 横向位移对弧长的1阶导数 |
| l″ | 横向位移对弧长的2阶导数 |
表2 Frenet坐标系各参数及含义
Table 2 The parameters and meanings of Frenet coordinate system
| 参数 | 含义 |
|---|---|
| rr/m | 车辆投影的位置矢量 |
| /(m·s-1) | 纵向速度 |
| /(m·s-2) | 纵向加速度 |
| kr/m-1 | 投影的位置矢量在道路几何上的曲率 |
| /(m·s-1) | 横向速度 |
| /(m·s-2) | 横向加速度 |
| τr | 投影在道路几何上切线的单位向量 |
| nr | 投影在道路几何上法线的单位向量 |
| l' | 横向位移对弧长的1阶导数 |
| l″ | 横向位移对弧长的2阶导数 |

图5 人工势场法势场示意图
Fig.5 Potential field diagram of artificial potential field method

图6 车辆躲避障碍物简图
Fig.6 Vehicle obstacle avoidance sketch

图7 安全椭圆图
Fig.7 Safe elliptic graph

图8 解决中间平衡点问题
Fig.8 Addressing the middle equilibrium point

图9 解决路径过长问题
Fig.9 Solving the problem of long paths

图10 解决目标不可达问题
Fig.10 Solving the problem of unreachable targets

图11 预测距离流程图
Fig.11 Flow chart of prediction distance algorithm
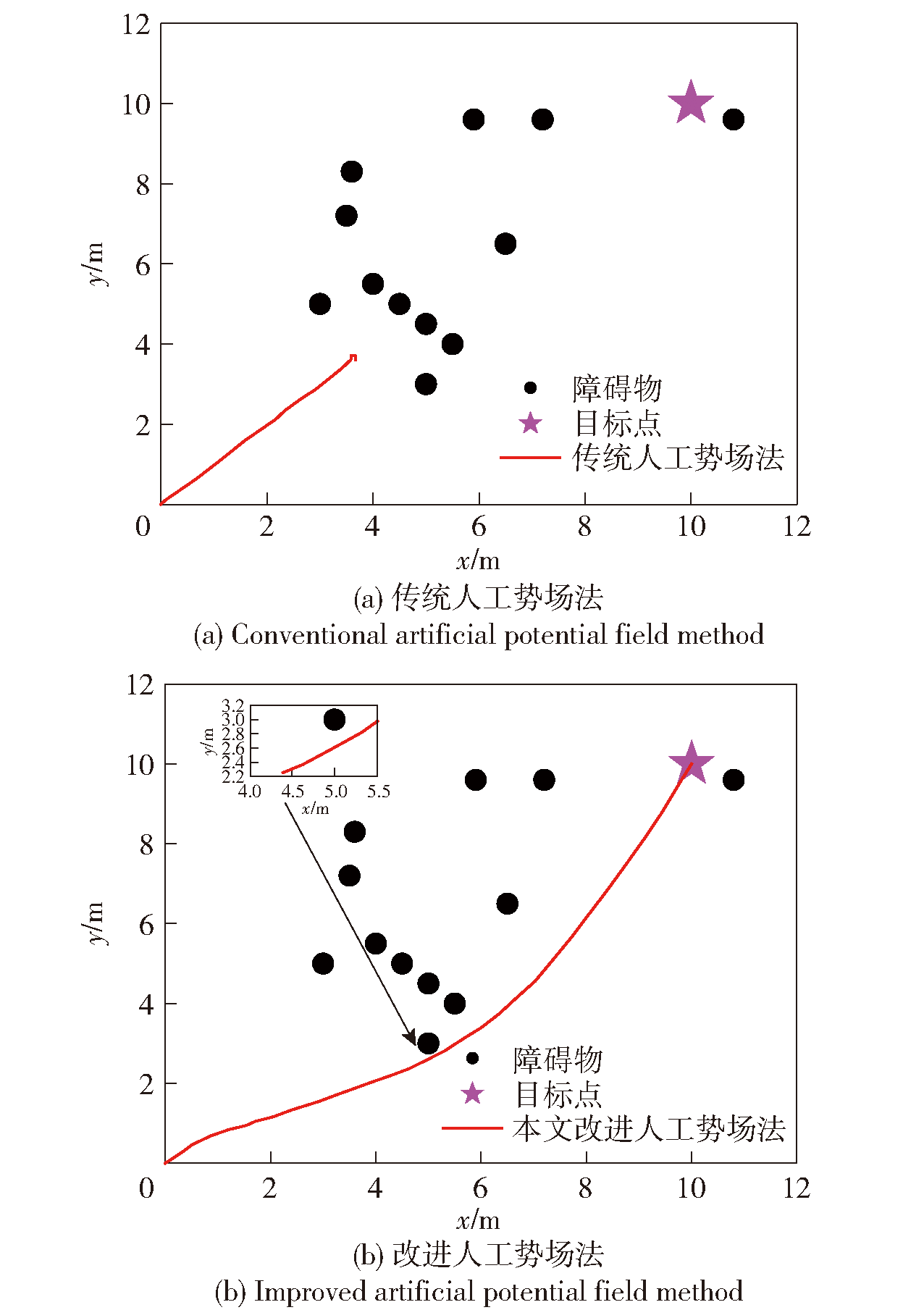
图12 解决U型障碍物问题
Fig.12 Solving the problem of U-shaped obstacles

图13 本文改进人工势场法与文献[6]算法对比分析
Fig.13 Comparison of the proposed algorithm and the algorithm in Ref.[6]
| 参数 | 传统人工 势场法 | 文献[ | 本文改进 人工势场法 |
|---|---|---|---|
| 步数 | - | 71 | 62 |
| 路径长/m | - | 7.1 | 5.6 |
| 时间/s | - | 0.1114 | 0.036 |
表3 U型障碍物算法对比
Table 3 Comparison of U-shaped obstacle algorithms
| 参数 | 传统人工 势场法 | 文献[ | 本文改进 人工势场法 |
|---|---|---|---|
| 步数 | - | 71 | 62 |
| 路径长/m | - | 7.1 | 5.6 |
| 时间/s | - | 0.1114 | 0.036 |

图14 车辆速度示意图
Fig.14 Vehicle speed diagram

图15 躲避动态障碍物示意图
Fig.15 Schematic diagram of avoiding dynamic obstacles

图16 躲避障碍物不同算法对比效果
Fig.16 Path planning effects of different methods
| 算法 | 仿真时间/s | 仿真步长 | 路径长度/m |
|---|---|---|---|
| RRT算法 | 0.92 | 0.5 | 1652 |
| 传统人工势场法 | 0.40 | 0.5 | |
| 改进人工势场法 | 0.47 | 0.5 | 1476 |
表4 算法仿真数据对比
Table 4 Comparison of algorithm simulation data
| 算法 | 仿真时间/s | 仿真步长 | 路径长度/m |
|---|---|---|---|
| RRT算法 | 0.92 | 0.5 | 1652 |
| 传统人工势场法 | 0.40 | 0.5 | |
| 改进人工势场法 | 0.47 | 0.5 | 1476 |

图17 自动驾驶系统示意图
Fig.17 Schematic diagram of automatic driving system

图18 躲避静态障碍物仿真场景过程图(左:准备避障,中:避障中,右:完成避障)
Fig.18 Moving trajectory during static obstacle avoidance(Left:preparing for obstacle avoidance; Middle:avoiding obstacles; Right:obstacle avoidance completed)

图19 仿真路径跟踪效果
Fig.19 Simulation path tracking effect

图20 躲避动态障碍物仿真场景过程图(左:准备避障,中:避障中,右:完成避障)
Fig.20 Moving trajectory during dynamic obstacle avoidance(Left:preparing for obstacle avoidance; Middle:Avoiding obstacles; Right:obstacle avoidance completed)

图21 躲避动态障碍物路径跟踪效果
Fig.21 Joint simulation path tracking effect

图22 躲避U型障碍物仿真过程(左:准备避障,中:避障中,右:完成避障)
Fig.22 Simulation process of avoiding U-shaped obstacles (Left:preparing for obstacle avoidance;Middle:avoiding obstacles; Right:obstacle avoidance completed)

图23 躲避动态障碍物仿真过程(左:准备避障,中:避障中,右:完成避障)
Fig.23 Simulation process of avoiding dynamic obstacles (Left:preparing for obstacle avoidance;Middle:avoiding obstacles; Right:obstacle avoidance completed)

图24 大曲率下躲避动态障碍物仿真过程(左:准备避障,中:避障中,右:完成避障)
Fig.24 Simulation process of avoiding dynamic obstacles under large curvature(Left:preparing for obstacle avoidance; Middle:avoiding obstacles; Right:obstacle avoidance completed)

图25 躲避动态障碍物路径跟踪效果
Fig.25 Avoid dynamic obstacle path tracking effect
| [1] |
翟丽, 张雪莹, 张闲, 等. 基于势场法的无人车局部动态避障路径规划算法[J]. 北京理工大学学报, 2022, 42(7):696-705.
|
|
|
|
| [2] |
牛秦玉, 李美凡, 赵勇. 改进人工势场法的AGV路径规划算法研究[J]. 机床与液压, 2022, 50(17):19-24.
doi: 10.3969/j.issn.1001-3881.2022.17.004 |
|
|
|
| [3] |
|
| [4] |
修彩靖, 陈慧. 基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J]. 汽车工程, 2013, 35(9):808-811.
|
|
|
|
| [5] |
陈相茹. 基于人工势场理论的车辆行驶路径建模研究[D]. 长春: 吉林大学, 2020.
|
|
|
|
| [6] |
李二超, 王玉华. 改进人工势场法的移动机器人避障轨迹研究[J]. 计算机工程与应用, 2022, 58(6):296-304.
doi: 10.3778/j.issn.1002-8331.2108-0122 |
|
|
|
| [7] |
孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10):2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
|
|
| [8] |
|
| [9] |
王沙晶, 陈建业. 基于Frenet坐标系的智能车运动规划研究[J]. 移动电源与车辆, 2019, 195(1):22-29.
|
|
|
|
| [10] |
魏民祥, 滕德成, 吴树凡. 基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J]. 控制与决策, 2021, 36(4):815-824.
|
|
|
|
| [11] |
刘冰雁, 叶雄兵, 方胜良, 等. 基于Frenet和改进人工势场的在轨规避路径自主规划[J]. 北京航空航天大学学报, 2021, 47(4):731-741.
|
|
|
|
| [12] |
王威, 陈慧岩, 马建昊, 等. 基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪[J]. 兵工学报, 2019, 40(11):2336-2351.
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
| [13] |
袁春, 龚城, 何成诚, 等. Frenet坐标系及凸近似避障原理的无人车局部路径规划[J]. 重庆理工大学学报(自然科学), 2022, 36(4):59-67.
|
|
|
|
| [14] |
李萌. 基于Frenet坐标系的智能车辆多场景轨迹规划研究[D]. 哈尔滨: 哈尔滨工业大学, 2021.
|
|
|
|
| [15] |
|
| [16] |
陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3):651-658.
doi: 10.3969/j.issn.1000-1093.2019.03.025 |
|
|
|
| [17] |
韩宇洪. 基于改进人工势场法的无人车避障路径规划研究[D]. 重庆: 重庆理工大学, 2020.
|
|
|
|
| [18] |
朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 镇江: 江苏大学, 2017.
|
|
|
|
| [19] |
范世鹏, 祁琪, 路坤锋, 等. 基于改进人工势场法的巡航导弹自主避障技术[J]. 北京理工大学学报, 2018, 38(8):828-834.
|
|
|
|
| [20] |
|
| [1] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [2] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [3] | 何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱. 智能无人车辆混合储能系统选配与参数优化[J]. 兵工学报, 2023, 44(9): 2791-2801. |
| [4] | 赵晓冬, 张洵颖. 基于YOLOv5的无人车自主目标识别优化算法[J]. 兵工学报, 2023, 44(9): 2732-2744. |
| [5] | 潘博, 李胜飞, 汪洋, 谭森起, 张乃斯, 罗天, 崔星. 多轴分布式驱动无人车辆极限操纵状态整车集成控制方法[J]. 兵工学报, 2023, 44(11): 3279-3294. |
| [6] | 李作轩, 贾良跃, 郝佳, 王超, 王国新, 明振军, 阎艳. 基于多工况关联的无人车辆车身结构轻量化优化设计[J]. 兵工学报, 2023, 44(11): 3529-3542. |
| [7] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [8] | 宋佳睿, 陶刚, 李德润, 臧政, 吴绍斌, 龚建伟. 参数自优化的有人与无人车辆编队鲁棒模型预测控制[J]. 兵工学报, 2023, 44(1): 84-97. |
| [9] | 谭颖琦, 许景懿, 熊光明, 李子睿, 陈慧岩. 基于轨迹规划与CNN-LSTM预测的履带式混合动力无人平台能量管理优化[J]. 兵工学报, 2022, 43(11): 2738-2748. |
| [10] | 杜广泽, 张旭东, 邹渊, 郑壮壮. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10): 2096-2105. |
| [11] | 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4