
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (7): 2110-2127.doi: 10.12382/bgxb.2023.0132
田洪清1, 马明涛1, 张博1, 郑讯佳2,*( )
)
收稿日期:2023-02-24
上线日期:2023-11-18
通讯作者:
基金资助:
TIAN Hongqing1, MA Mingtao1, ZHANG Bo1, ZHENG Xunjia2,*()
Received:2023-02-24
Online:2023-11-18
摘要:
智能车辆路径规划是智能驾驶的一项关键技术,传统的车辆路径规划方法以最短通行距离或最小通行时间为优化目标,忽视了规划过程中的车辆运动风险。在快速随机搜索树算法的基础上,运用势场模型量化评估车辆运动风险。在快速获得车辆初始运动轨迹的基础上,以车辆运动轨迹的安全性以及通行距离和车辆转角作为运动轨迹评估依据,采用轨迹重构优化方法持续优化车辆运动轨迹。采用场景模拟仿真方法,验证规划轨迹的性能。仿真实验结果表明,在典型场景下,该方法具备平衡车辆运动效率与安全性能的特点,能在越野环境中规避障碍物和环境威胁,所规划的运动轨迹符合车辆运动学特性,运动轨迹的安全性好,通行效率较高。
中图分类号:
田洪清, 马明涛, 张博, 郑讯佳. 越野环境下势场搜索树智能车辆路径规划方法[J]. 兵工学报, 2024, 45(7): 2110-2127.
TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment[J]. Acta Armamentarii, 2024, 45(7): 2110-2127.
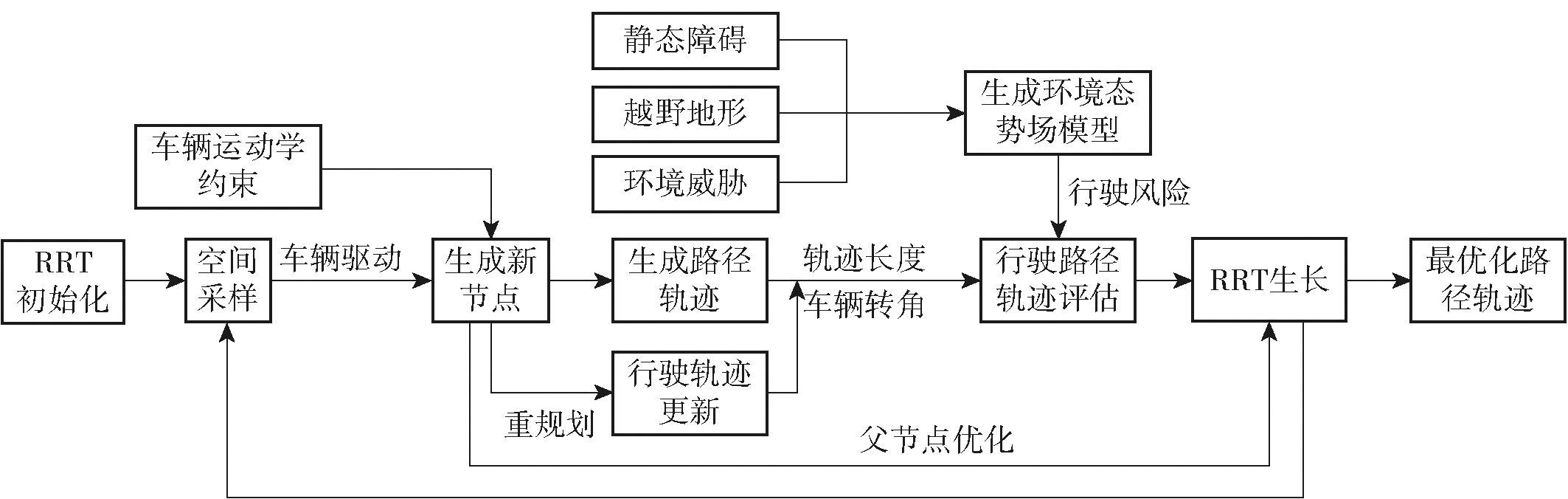
图1 PFT*算法功能框架
Fig.1 PFT* algorithm framework
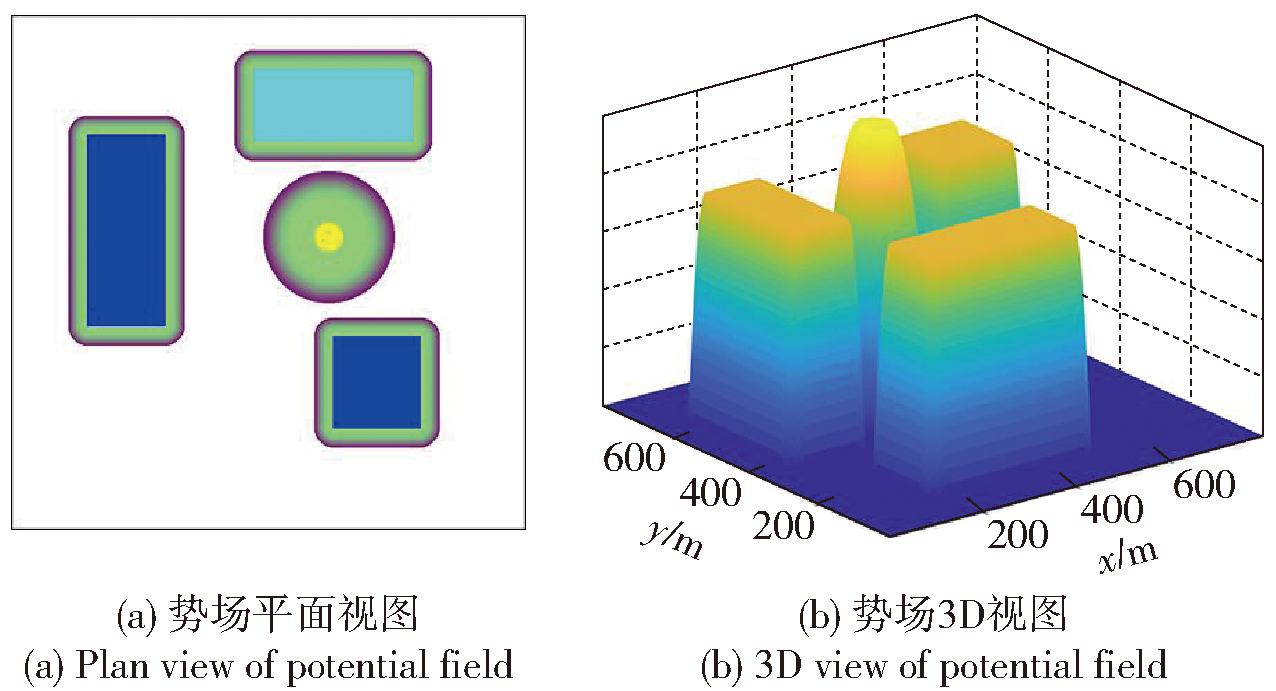
图2 场景势场图
Fig.2 Scenario potential field map
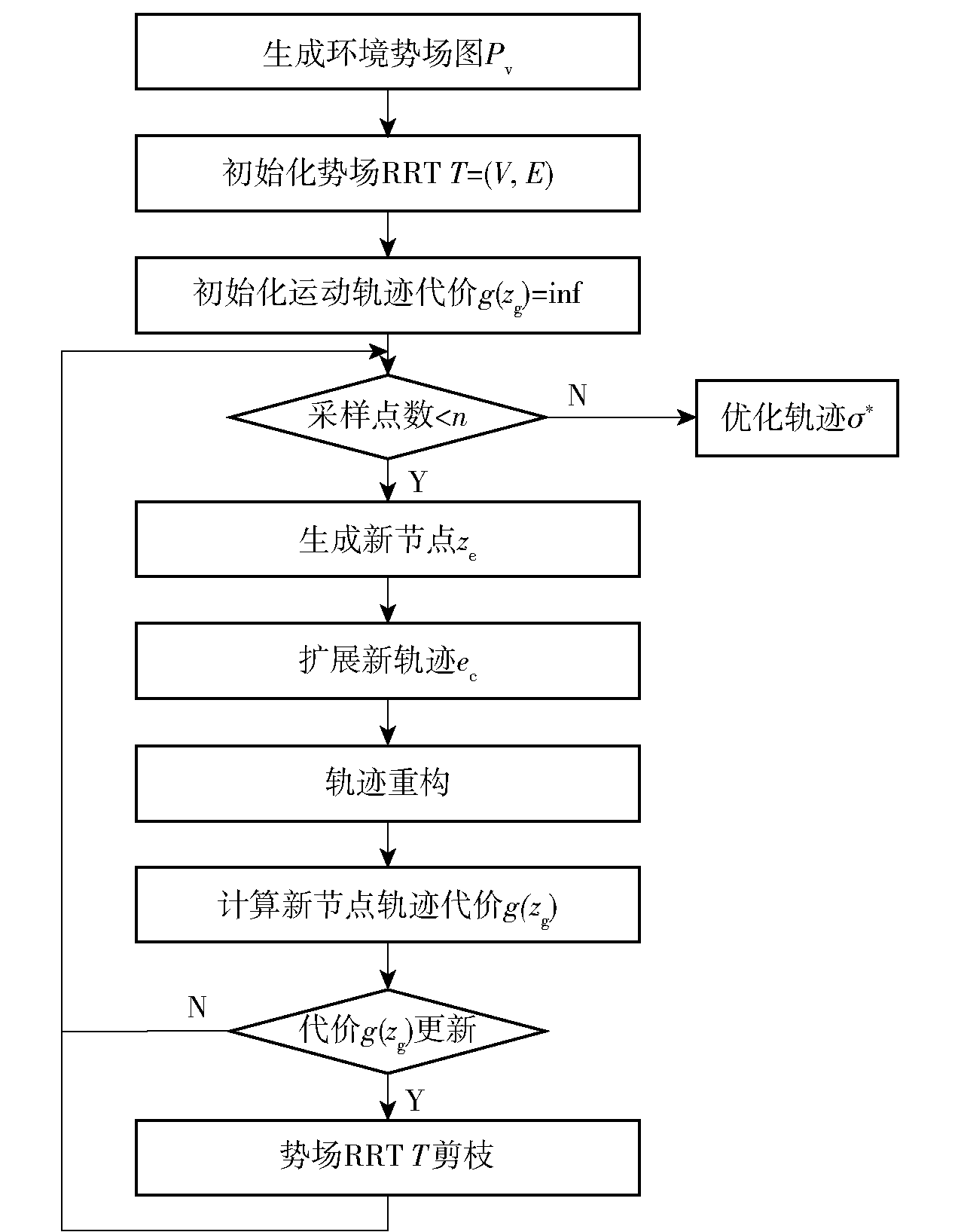
图3 PFT*路径规划算法流程图
Fig.3 PFT* path planning algorithm flowchart
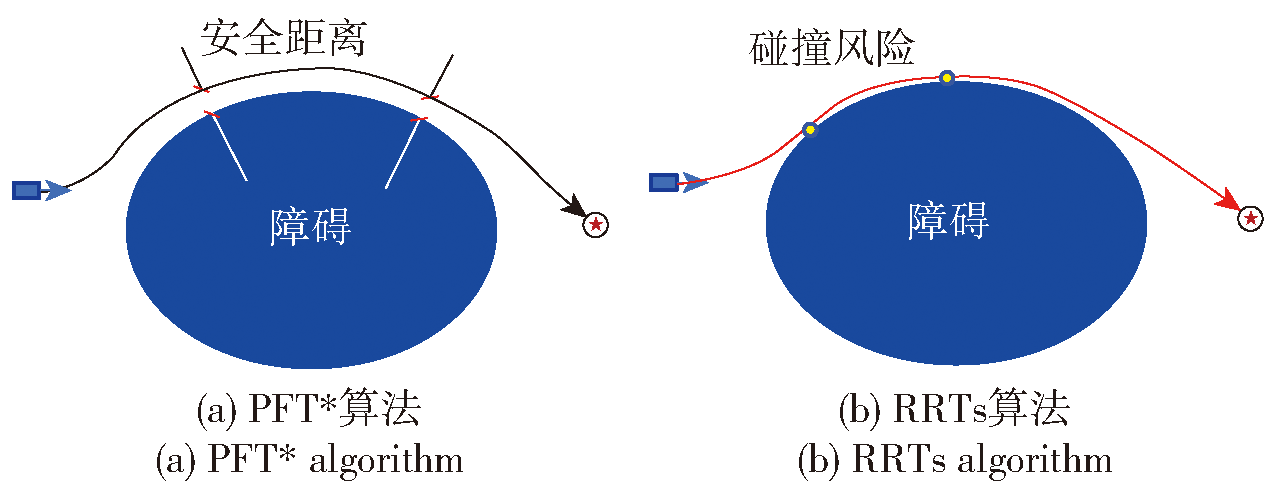
图4 PFT*算法与RRTs算法对比
Fig.4 Comparison between PFT* and RRTs
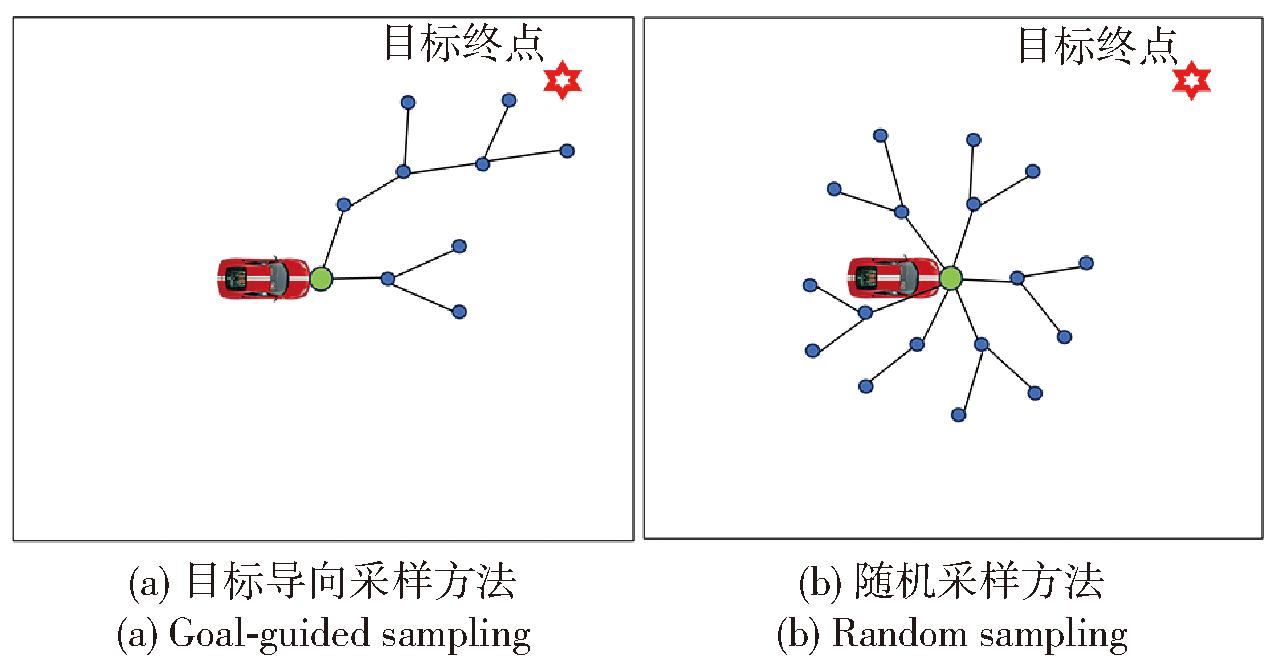
图5 智能采样与均布采样搜索方向对比
Fig.5 Comparison of searching directions of intelligent sampling and general sampling methods
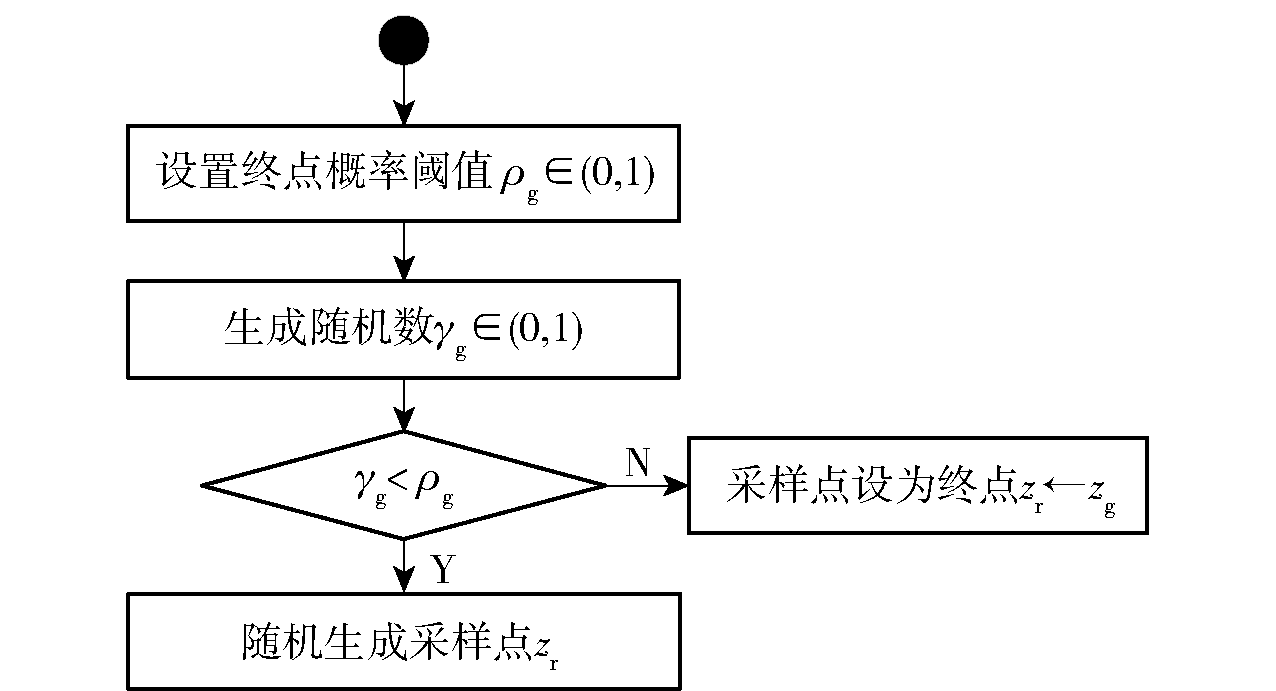
图6 智能采样流程图
Fig.6 Intelligent sampling flowchart
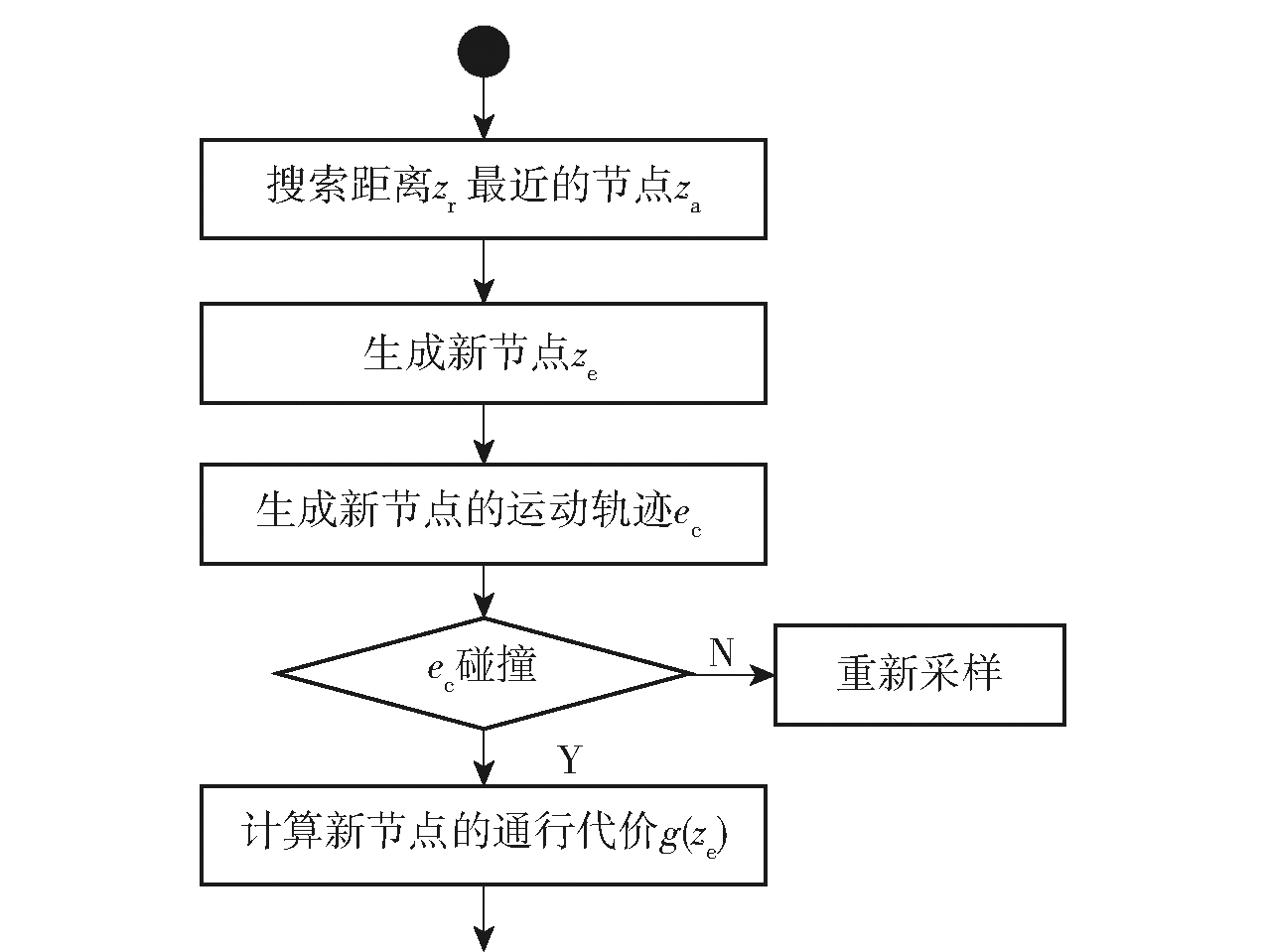
图7 车辆运动轨迹生成流程图
Fig.7 Vehicle trajectory generation flowchart
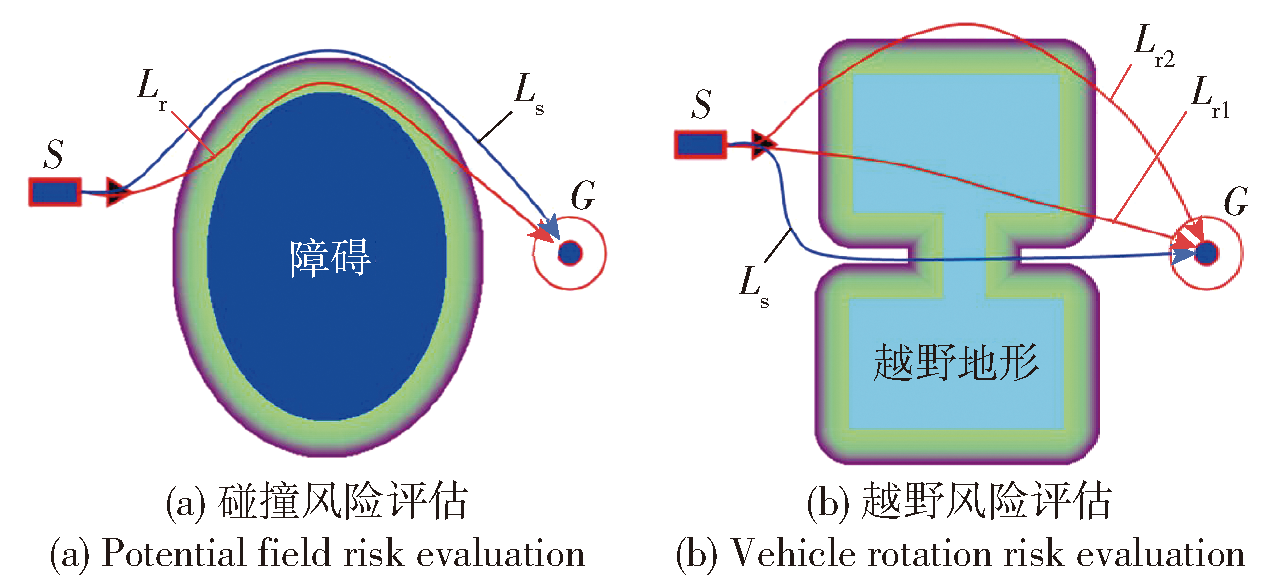
图8 车辆运动风险评估
Fig.8 Vehicle path risk evaluation
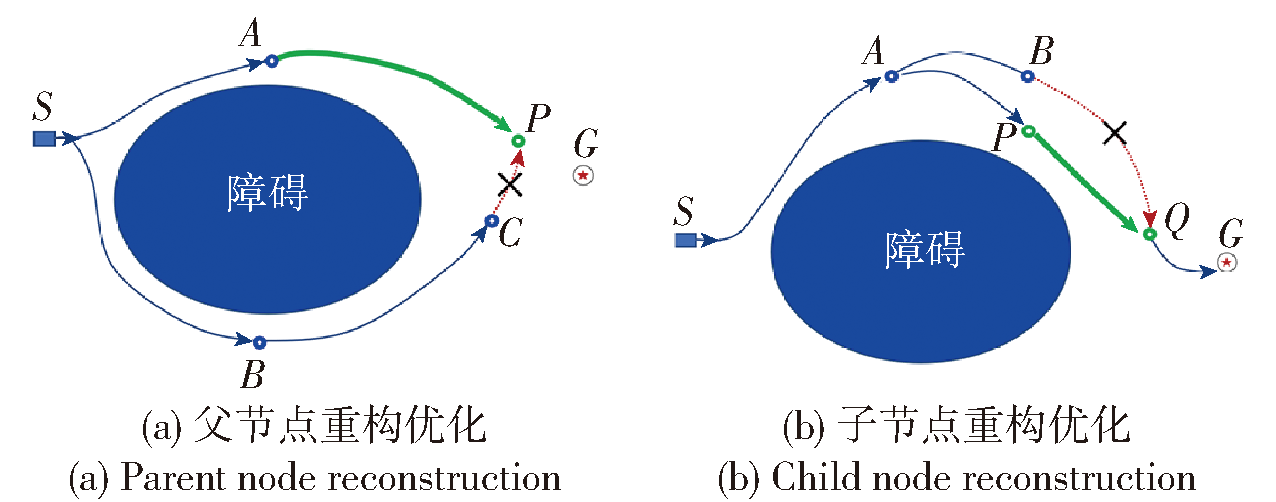
图9 RRT重构优化
Fig.9 RRT reconstruction
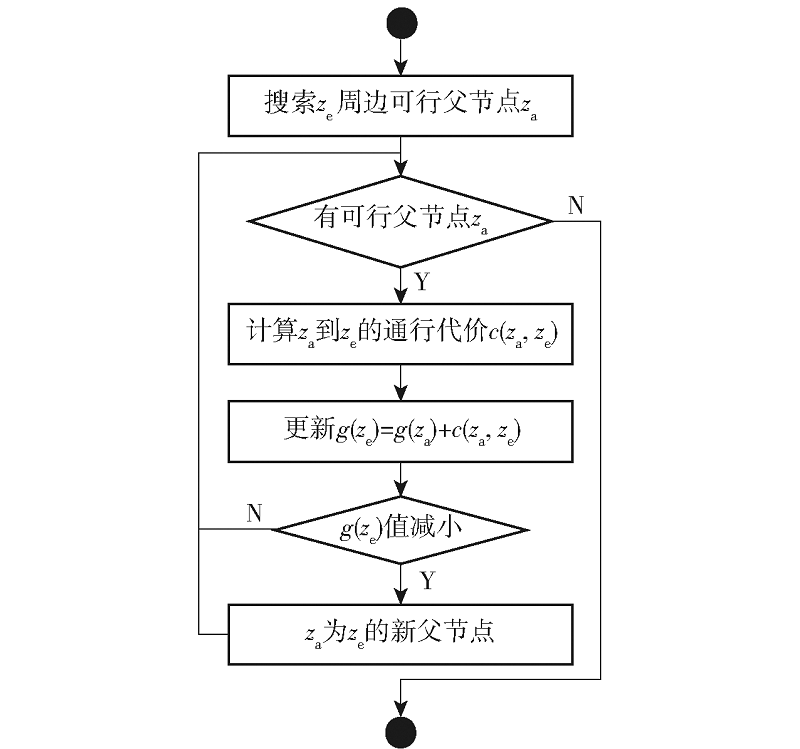
图10 RRT父节点重构流程图
Fig.10 RRT parent node reconstruction
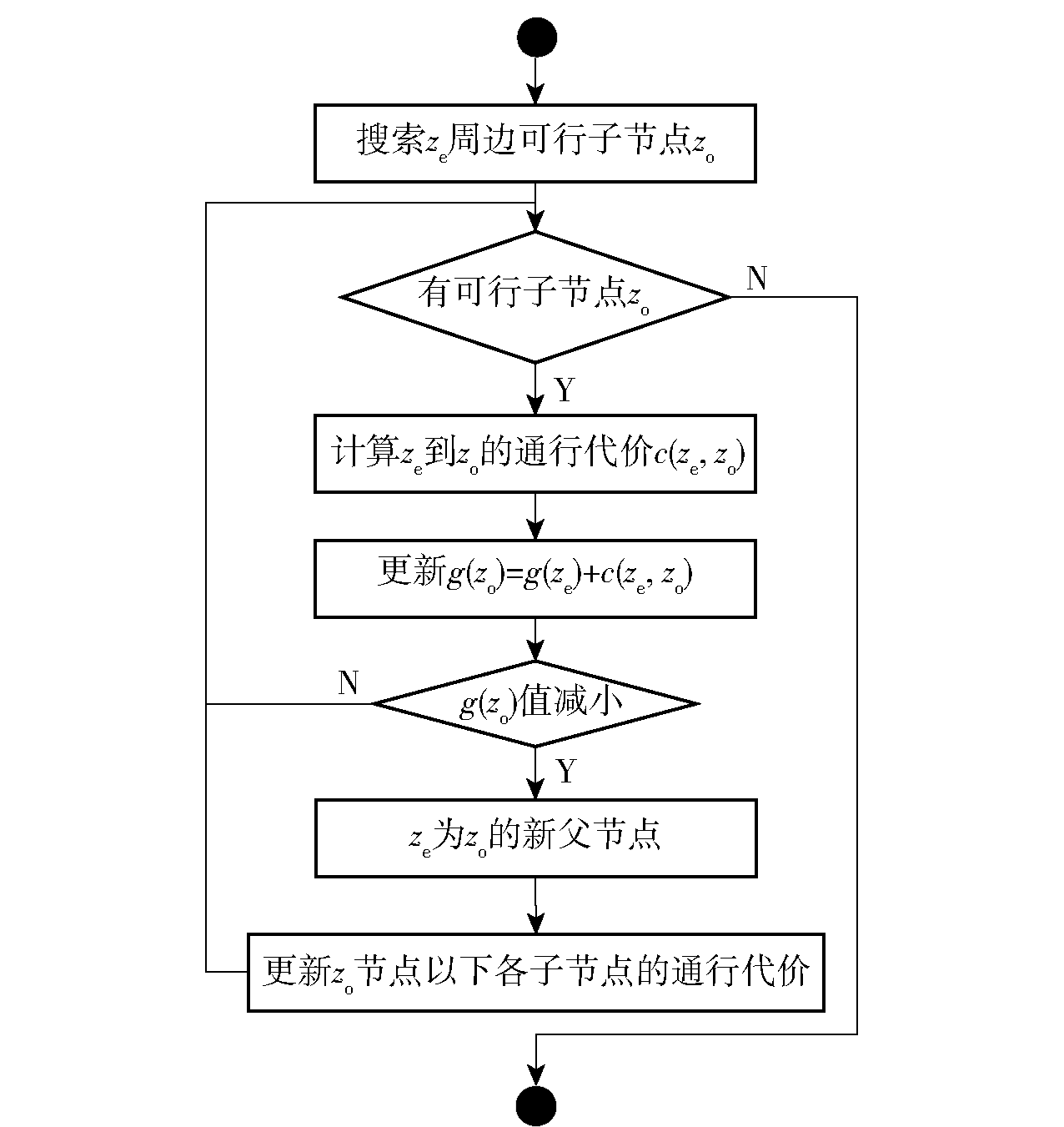
图11 RRT子节点重构流程图
Fig.11 Flowchart of RRT child node reconstruction
| 车辆参数 | 数值 |
|---|---|
| 外形尺寸(长×宽×高)/mm | 4955×2137×1920 |
| 轴距/mm | 3300 |
| 整车质量/kg | 3200 |
| 行驶车速/(km·h-1) | 30 |
表1 路径规划仿真参数
Table 1 Path planning simulation parameters
| 车辆参数 | 数值 |
|---|---|
| 外形尺寸(长×宽×高)/mm | 4955×2137×1920 |
| 轴距/mm | 3300 |
| 整车质量/kg | 3200 |
| 行驶车速/(km·h-1) | 30 |

图12 仿真实验场景图
Fig.12 Simulation experiment scenarios

图13 场景仿真实验过程
Fig.13 Scenario simulation experiment process
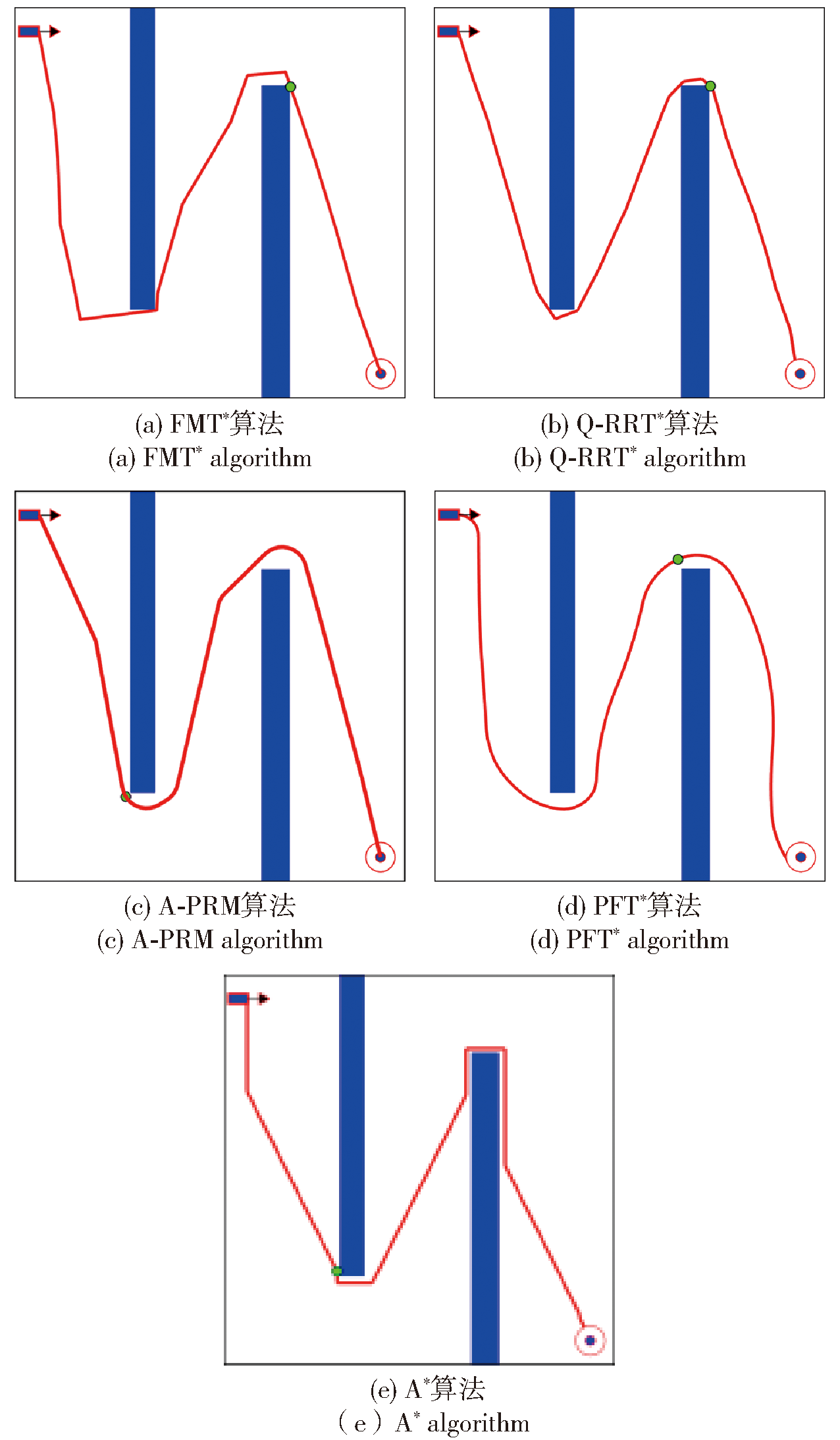
图14 仿真实验轨迹对比(场景1)
Fig.14 Comparison of simulation experimental trajectories (Scenario1)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 1999 | 161 | 2.17 | 2160 |
| Q-RRT* | 1876 | 265 | 1.62 | 2141 |
| A-PRM | 2102 | 60 | 12.22 | 2162 |
| A* | 1946 | 415 | 5.0 | 2361 |
| PFT* | 2018 | 33 | 22.80 | 2051 |
表2 仿真实验结果数据对比(场景1)
Table 2 Comparisonof simulated results (Scenario 1)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 1999 | 161 | 2.17 | 2160 |
| Q-RRT* | 1876 | 265 | 1.62 | 2141 |
| A-PRM | 2102 | 60 | 12.22 | 2162 |
| A* | 1946 | 415 | 5.0 | 2361 |
| PFT* | 2018 | 33 | 22.80 | 2051 |
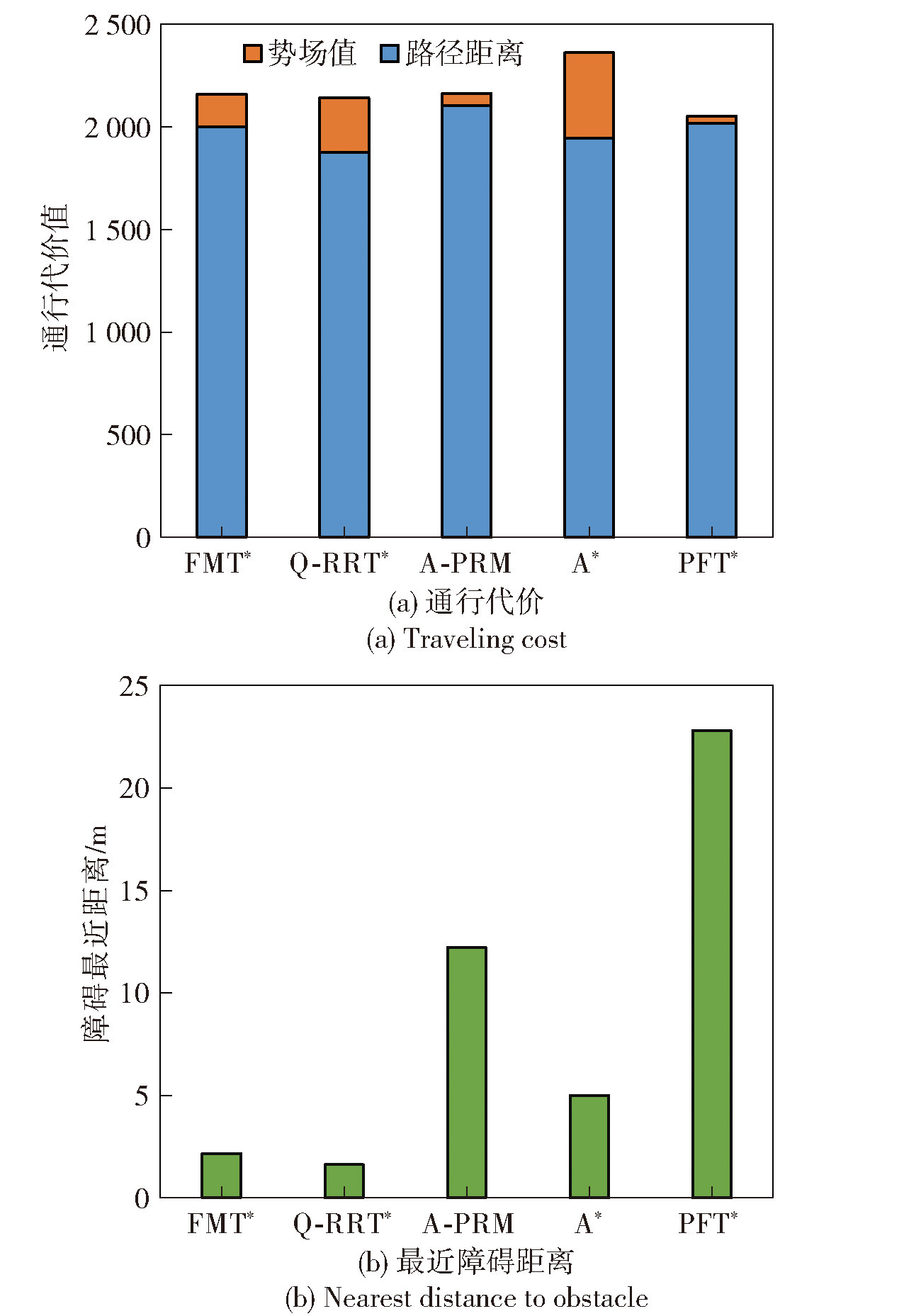
图15 仿真实验数据对比(场景1)
Fig.15 Comparison of simulated trajectories comparison (Scenario 1)
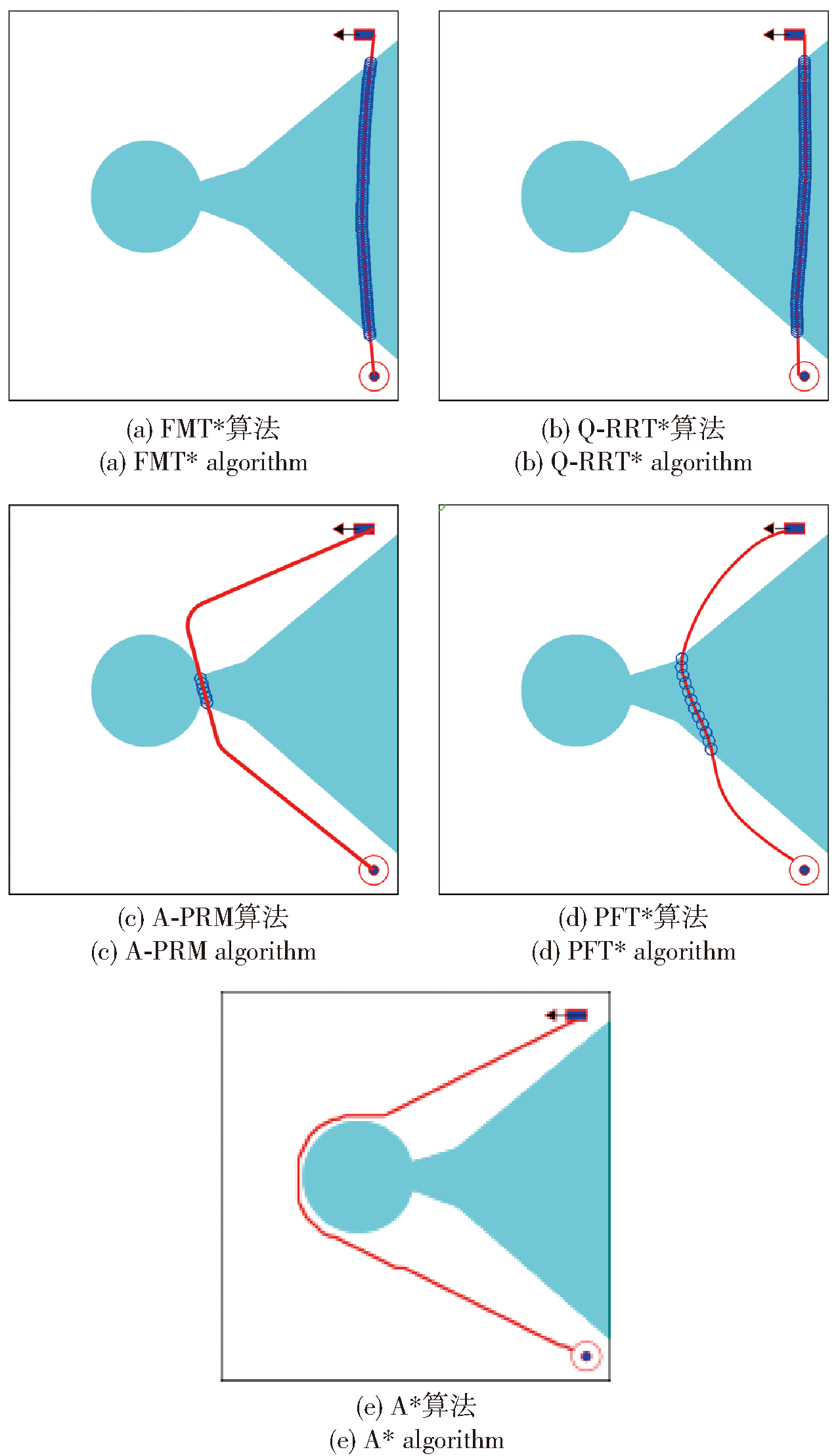
图16 仿真实验轨迹对比(场景2)
Fig.16 Comparison of simulated trajectories (Scenarios 2)
| 算法 | 距离/m | 势场值 | 越野距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 702 | 503 | 560 | 1 205 |
| Q-RRT* | 683 | 498 | 565 | 1 181 |
| A-PRM | 1 160 | 98 | 60 | 1 258 |
| A* | 1 457 | 267 | 0 | 1 724 |
| PFT* | 908 | 240 | 308 | 1 148 |
表3 仿真实验结果数据对比(场景2)
Table 3 Comparison of simulated results (Scenario 2)
| 算法 | 距离/m | 势场值 | 越野距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 702 | 503 | 560 | 1 205 |
| Q-RRT* | 683 | 498 | 565 | 1 181 |
| A-PRM | 1 160 | 98 | 60 | 1 258 |
| A* | 1 457 | 267 | 0 | 1 724 |
| PFT* | 908 | 240 | 308 | 1 148 |
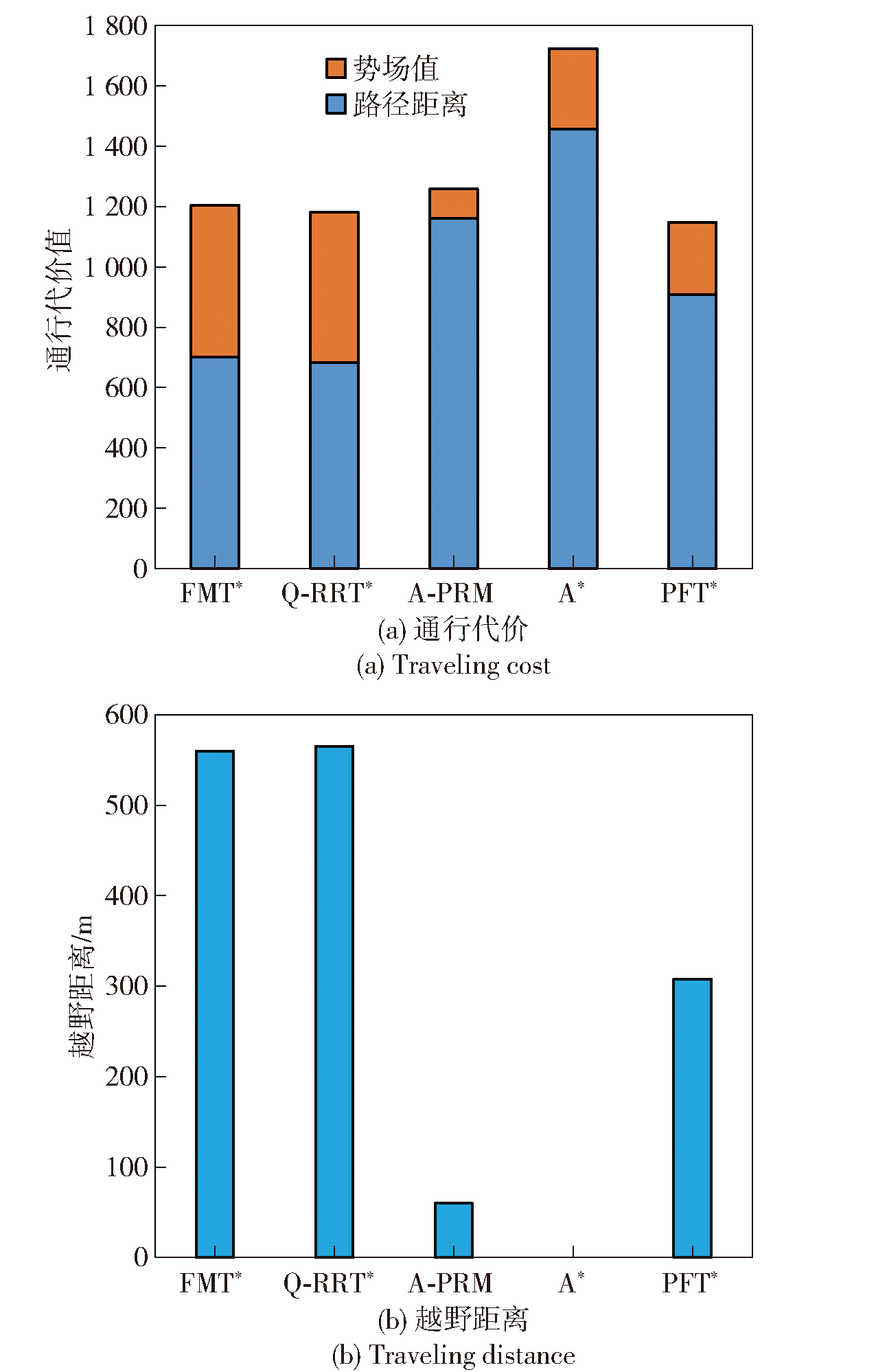
图17 仿真实验数据对比(场景2)
Fig.17 Comparison of simulated trajectories (Scenario 2)

图18 仿真实验轨迹对比(场景3)
Fig.18 Comparison of simulated trajectories (Scenario 3)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1417 | 971 | 2.95 | 235 | 2389 |
| Q-RRT* | 1341 | 676 | 1.82 | 200 | 2017 |
| A-PRM | 1628 | 318 | 17.04 | 70 | 1946 |
| A* | 1616 | 326 | 13.41 | 0 | 1942 |
| PFT* | 1629 | 109 | 23.30 | 42 | 1738 |
表4 仿真实验结果数据对比(场景3)
Table 4 Comparison of simulated results (Scenario 3)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1417 | 971 | 2.95 | 235 | 2389 |
| Q-RRT* | 1341 | 676 | 1.82 | 200 | 2017 |
| A-PRM | 1628 | 318 | 17.04 | 70 | 1946 |
| A* | 1616 | 326 | 13.41 | 0 | 1942 |
| PFT* | 1629 | 109 | 23.30 | 42 | 1738 |
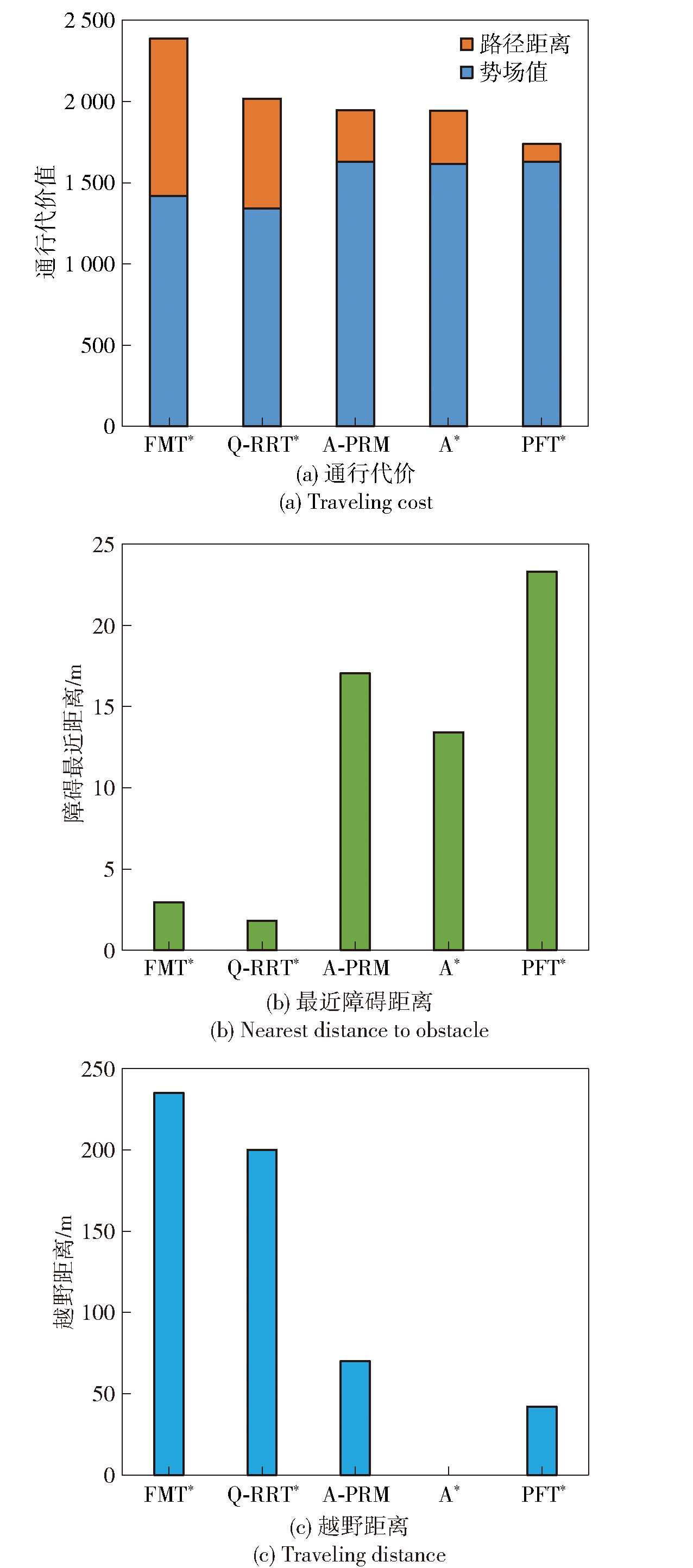
图19 仿真实验数据对比(场景3)
Fig.19 Comparison of simulated trajectories (Scenario 3)

图20 仿真实验轨迹对比(场景4)
Fig.20 Comparison of simulated trajectories (Scenario 4)
| 算法 | 距离/ m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 1138 | 230 | 3.41 | 0 | 105 | 1368 |
| Q-RRT* | 1046 | 158 | 1.76 | 0 | 150 | 1204 |
| A-PRM | 1147 | 326 | 1.94 | 98 | 139 | 1473 |
| A* | 1102 | 126 | 13.44 | 0 | 123 | 1228 |
| PFT* | 1128 | 41 | 18.21 | 0 | 110 | 1169 |
表5 仿真实验结果数据对比(场景4)
Table 5 Comparison of simulated results (Scenario 4)
| 算法 | 距离/ m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 1138 | 230 | 3.41 | 0 | 105 | 1368 |
| Q-RRT* | 1046 | 158 | 1.76 | 0 | 150 | 1204 |
| A-PRM | 1147 | 326 | 1.94 | 98 | 139 | 1473 |
| A* | 1102 | 126 | 13.44 | 0 | 123 | 1228 |
| PFT* | 1128 | 41 | 18.21 | 0 | 110 | 1169 |
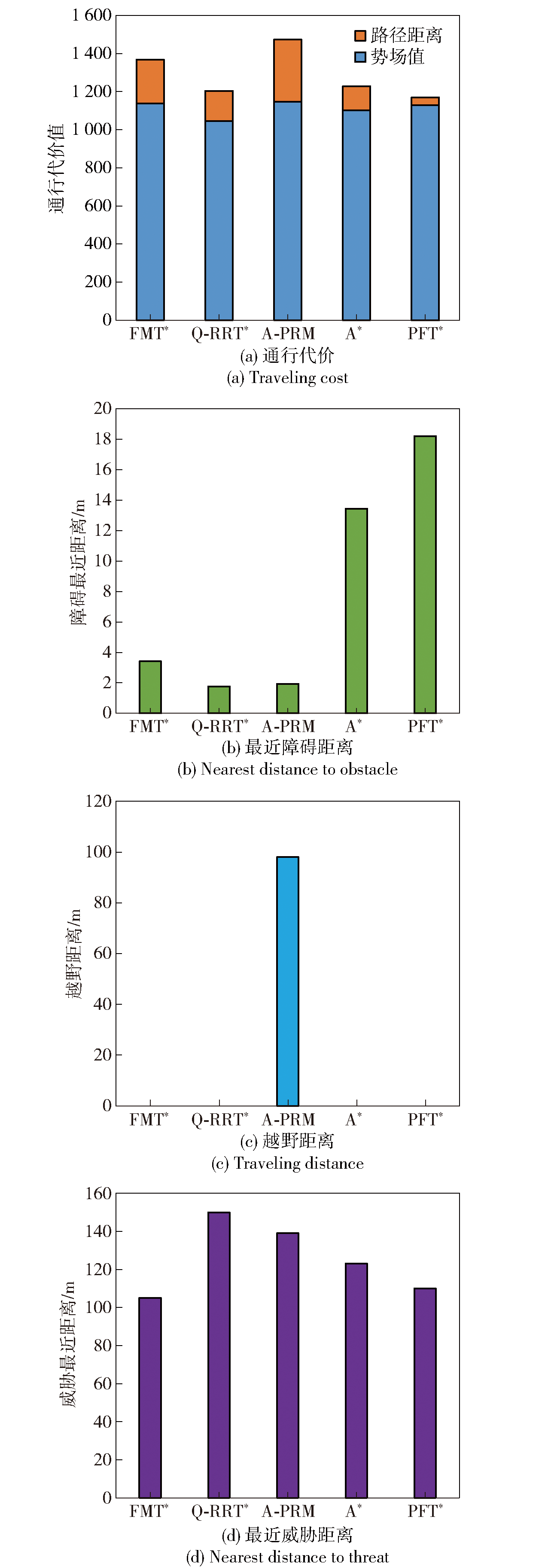
图21 仿真实验数据对比(场景3)
Fig.21 Comparison of simulated trajectories (Scenario 3)

图22 仿真实验轨迹对比(场景5)
Fig.22 Comparison of simulated trajectories (Scenario 5)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1 302 | 668 | 3.30 | 80 | 1 970 |
| Q-RRT* | 1 244 | 530 | 1.96 | 0 | 1 774 |
| A-PRM | 1 276 | 236 | 11.11 | 0 | 1 512 |
| A* | 1 262 | 186 | 5.01 | 0 | 1 448 |
| PFT* | 1 338 | 97 | 18.12 | 0 | 1 435 |
表6 仿真实验结果数据对比(场景5)
Table 6 Comparison of simulated results (Scenario 5)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 通行 代价 |
|---|---|---|---|---|---|
| FMT* | 1 302 | 668 | 3.30 | 80 | 1 970 |
| Q-RRT* | 1 244 | 530 | 1.96 | 0 | 1 774 |
| A-PRM | 1 276 | 236 | 11.11 | 0 | 1 512 |
| A* | 1 262 | 186 | 5.01 | 0 | 1 448 |
| PFT* | 1 338 | 97 | 18.12 | 0 | 1 435 |
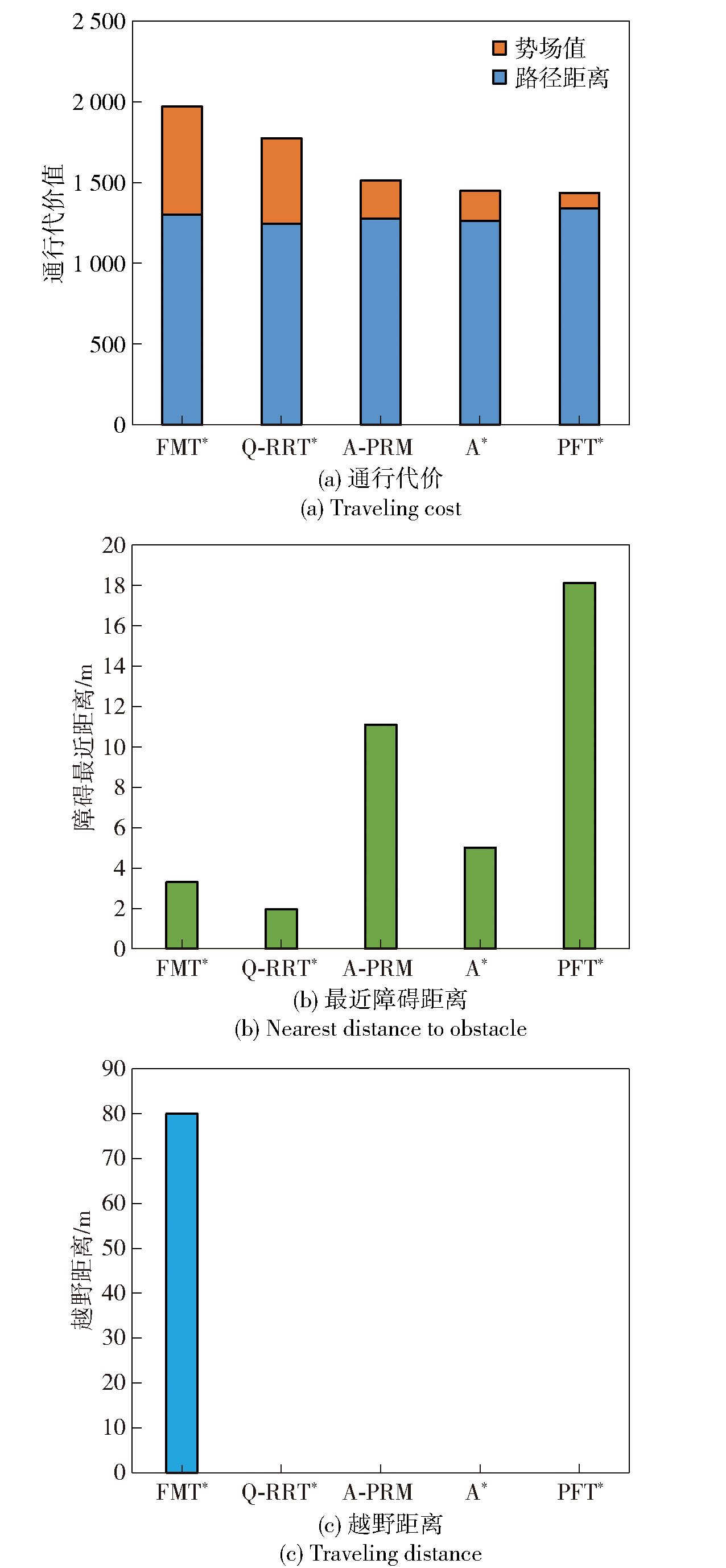
图23 仿真实验数据对比(场景5)
Fig.23 Comparison of simulated trajectories (Scenario 5)
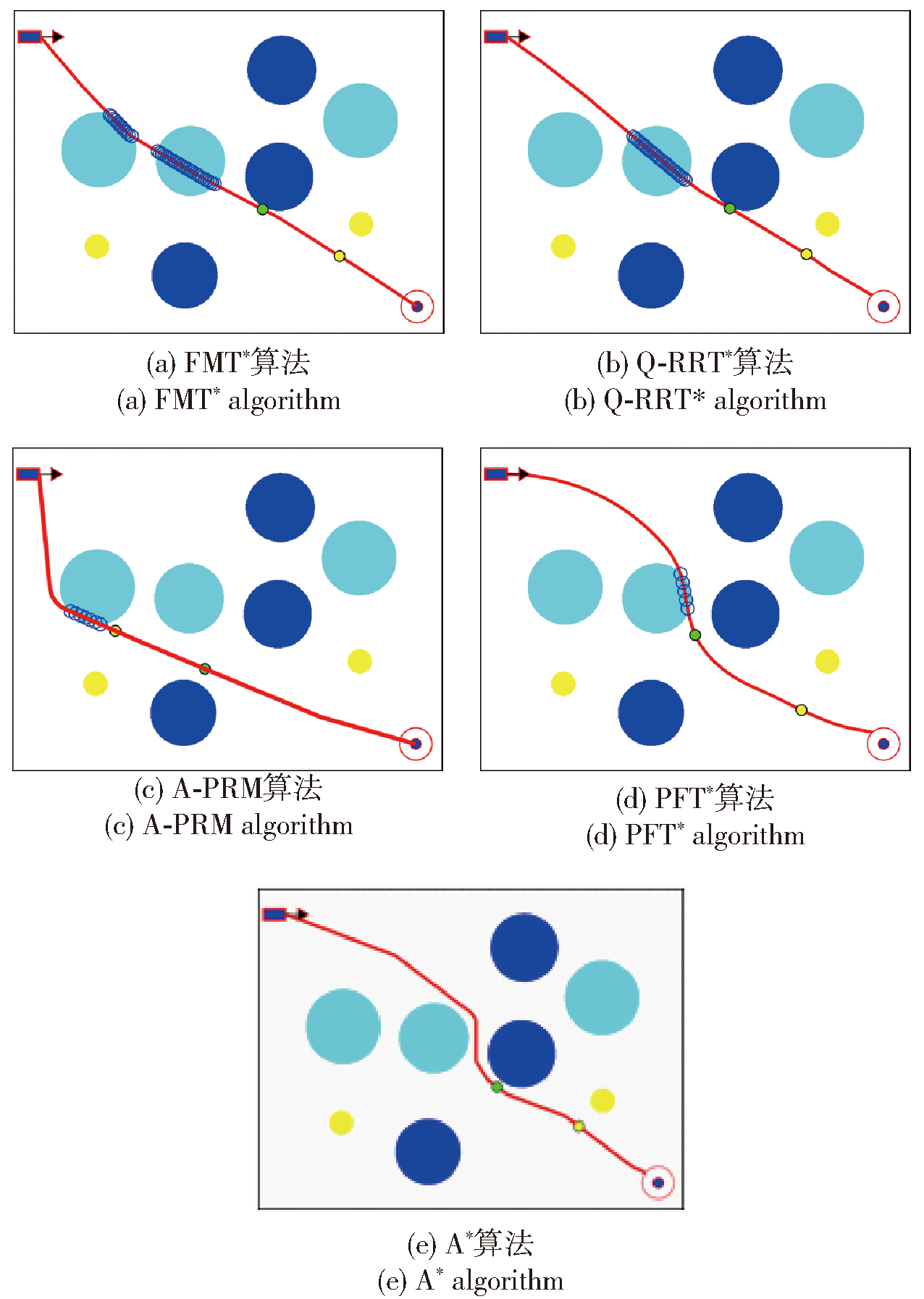
图24 仿真实验轨迹对比(场景6)
Fig.24 Comparison of simulated trajectories (Scenario 6)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 868 | 514 | 4.89 | 185 | 49 | 1382 |
| Q-RRT* | 838 | 438 | 9.89 | 125 | 50 | 1276 |
| A-PRM | 967 | 232 | 29.31 | 70 | 82 | 1199 |
| A* | 915 | 490 | 13 | 0 | 0.45 | 1405 |
| PFT* | 914 | 132 | 34.15 | 60 | 89 | 1046 |
表7 仿真实验结果数据对比(场景6)
Table 7 Comparison of simulated results (Scenario 6)
| 算法 | 距离/m | 势场值 | 最近障碍 距离/m | 越野距 离/m | 最近威胁 距离/m | 通行 代价 |
|---|---|---|---|---|---|---|
| FMT* | 868 | 514 | 4.89 | 185 | 49 | 1382 |
| Q-RRT* | 838 | 438 | 9.89 | 125 | 50 | 1276 |
| A-PRM | 967 | 232 | 29.31 | 70 | 82 | 1199 |
| A* | 915 | 490 | 13 | 0 | 0.45 | 1405 |
| PFT* | 914 | 132 | 34.15 | 60 | 89 | 1046 |
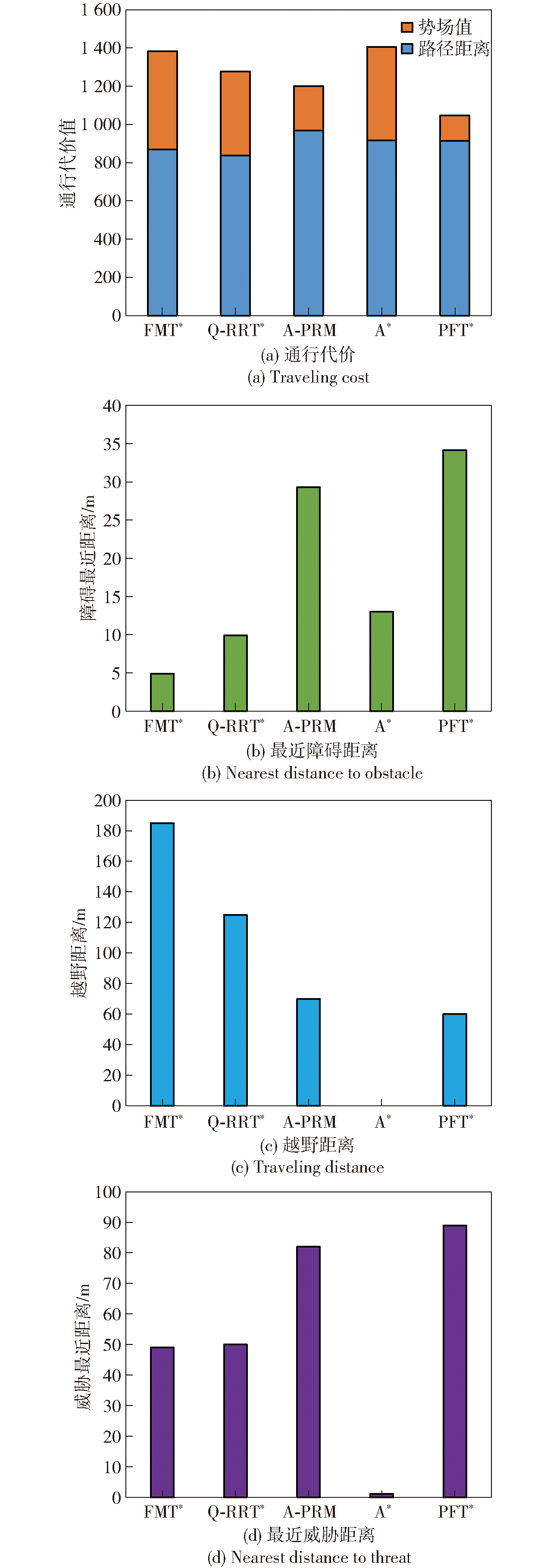
图25 仿真实验数据对比(场景6)
Fig.25 Comparison of simulated trajectories(Scenario 6)
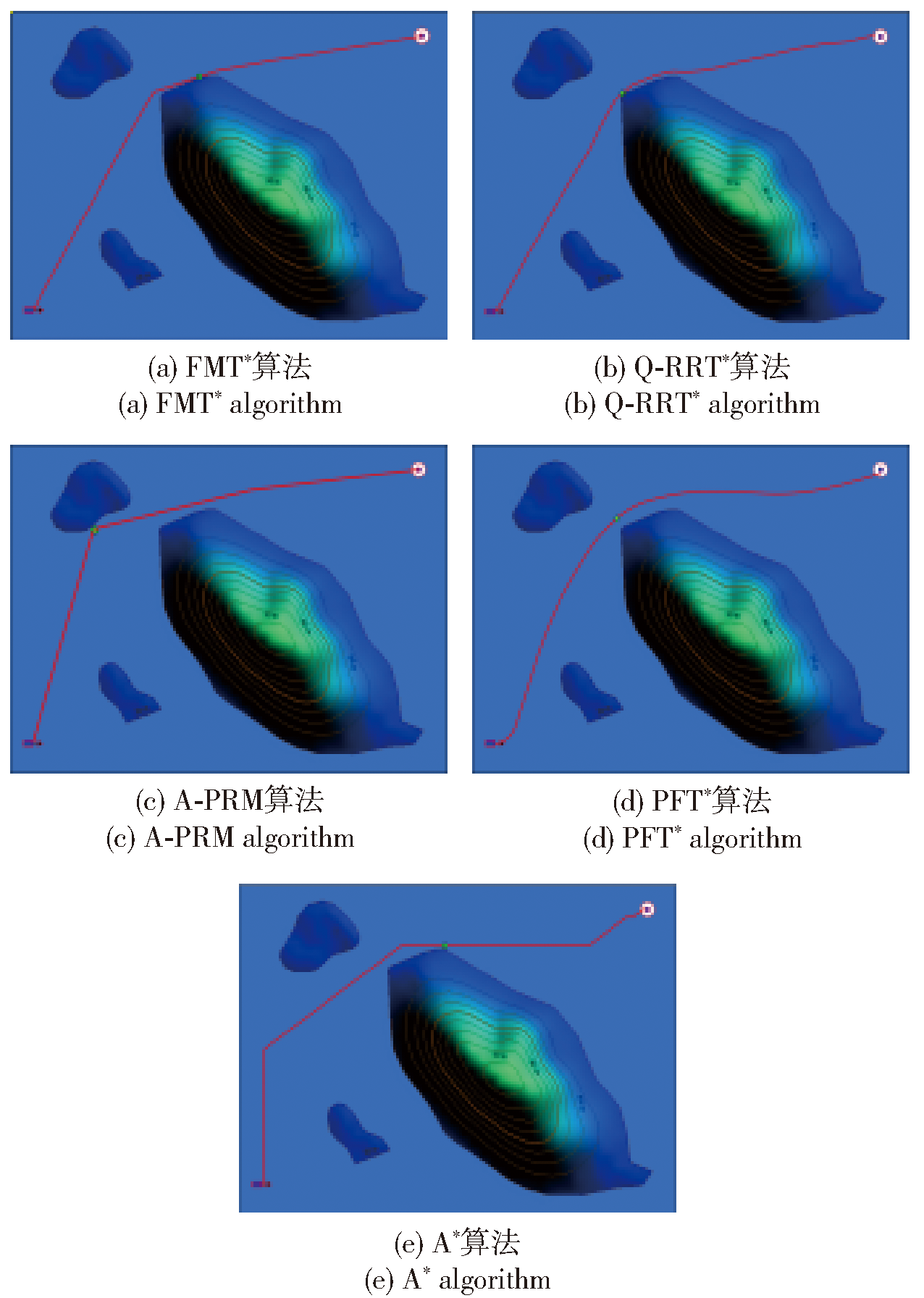
图26 高程地图轨迹对比(场景7)
Fig.26 Trajectory comparison in elevation map (Scenario7)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 2 218 | 410 | 2.9 | 2 628 |
| Q-RRT* | 2 188 | 144 | 3.3 | 2 332 |
| A-PRM | 2 359 | 180 | 16.1 | 2 539 |
| A* | 2 403 | 144 | 13.4 | 2 547 |
| PFT* | 2 274 | 0 | 44.2 | 2 274 |
表8 高程地图规划数据对比(场景7)
Table 8 Planning data comparison in elevation map (Scenario 7)
| 算法 | 距离/m | 势场值 | 最近障碍距离/m | 通行代价 |
|---|---|---|---|---|
| FMT* | 2 218 | 410 | 2.9 | 2 628 |
| Q-RRT* | 2 188 | 144 | 3.3 | 2 332 |
| A-PRM | 2 359 | 180 | 16.1 | 2 539 |
| A* | 2 403 | 144 | 13.4 | 2 547 |
| PFT* | 2 274 | 0 | 44.2 | 2 274 |
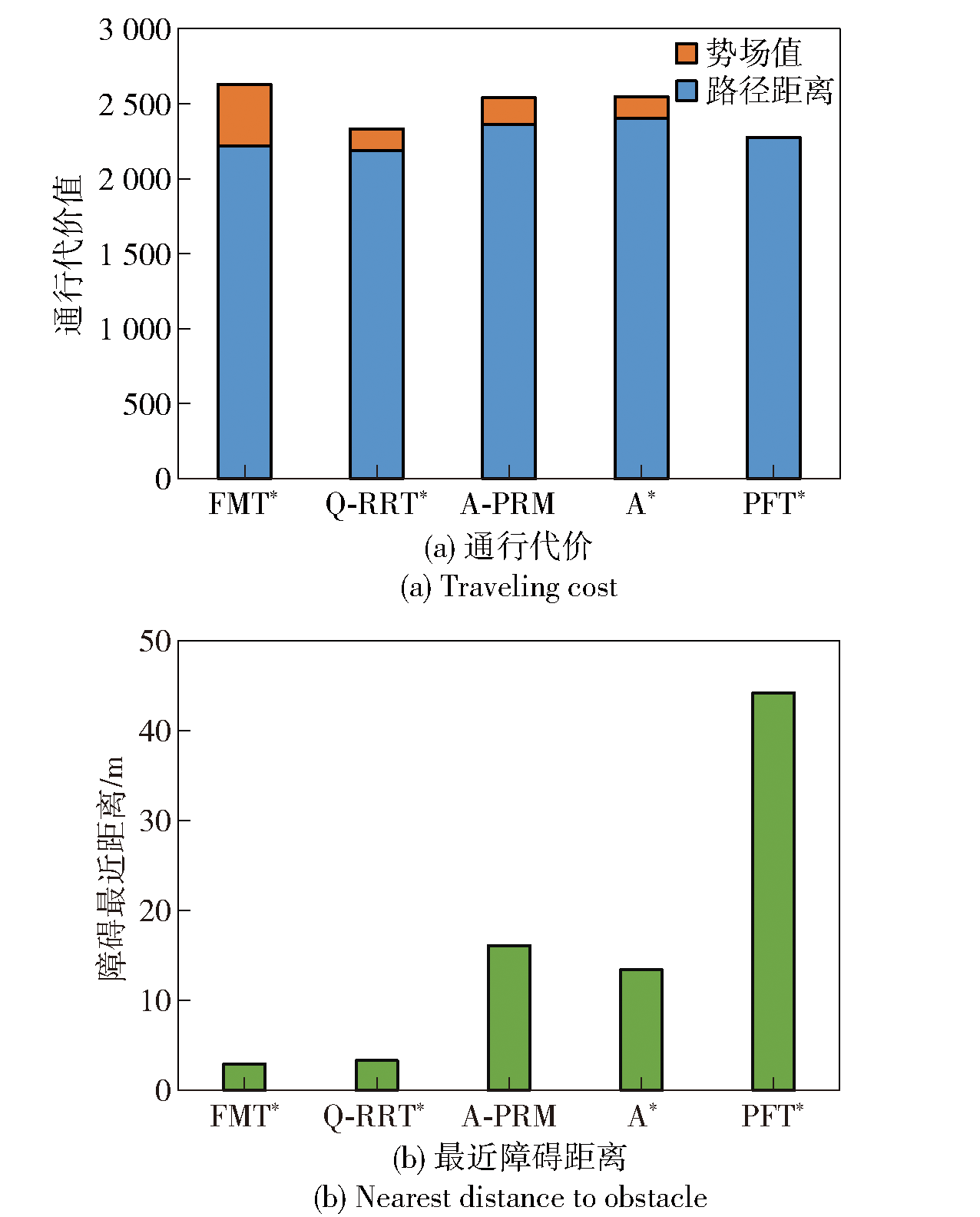
图27 高程地图规划数据对比(场景7)
Fig.27 Planning data comparison in elevation map(Scenario 7)
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述[J]. 中国公路学报, 2019, 32(6):20-33.
doi: 10.19721/j.cnki.1001-7372.2019.06.002 |
|
doi: 10.19721/j.cnki.1001-7372.2019.06.002 |
|
| [3] |
采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J]. 汽车安全与节能学报, 2021, 12(3): 279-297.
|
|
|
|
| [4] |
孔国杰, 冯时, 于会龙, 等. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1):11-26.
doi: 10.12382/bgxb.2022.0930 |
|
doi: 10.12382/bgxb.2022.0930 |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
田洪清, 王建强, 黄荷叶, 等. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7):1496-1505.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158.
|
|
|
|
| [18] |
冯来春, 梁华为, 杜明博, 等. 基于A*引导域的RRT智能车辆路径规划算法[J]. 计算机系统应用, 2017, 26(8):127-133.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
张立彬, 林后凯, 谭大鹏. 基于栅格空间的自适应GB_RRT*机械臂路径规划[J]. 计算机集成制造系统, 2022, 28(6):28-37.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
潘作栋, 周悦, 郭威, 等. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2023, 2023, 21(4):1496-1505.
|
|
|
|
| [32] |
|
| [33] |
|
| [34] |
李爱娟, 李舜酩, 李殿荣, 等. 智能车运动轨迹规划中的关键技术研究现状[J]. 机械科学与技术, 2013, 32(7):1022-1026.
|
|
|
|
| [35] |
田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4):518-526.
|
|
|
| [1] | 姬鹏, 郭明皓. 基于Frenet坐标下改进人工势场法的无人车局部路径规划[J]. 兵工学报, 2024, 45(7): 2097-2109. |
| [2] | 王霄龙, 陈洋, 胡棉, 李旭东. 基于改进深度Q网络的机器人持续监测路径规划[J]. 兵工学报, 2024, 45(6): 1813-1823. |
| [3] | 潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [4] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [5] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [6] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [7] | 蒋岩, 丁语嫣, 张兴龙, 徐昕. 基于模型预测与策略学习的智能车辆人机协同控制算法[J]. 兵工学报, 2023, 44(11): 3465-3477. |
| [8] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [9] | 刘龙龙, 陈慧岩, 刘海鸥, 关海杰, 卢佳兴. 基于拓扑路网的多挡无人履带平台路径重规划[J]. 兵工学报, 2023, 44(1): 279-289. |
| [10] | 胡致远, 王征, 杨洋, 尹洋. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684. |
| [11] | 郭威, 吴凯, 周悦, 孙洪鸣, 徐高飞, 高森. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6): 1387-1394. |
| [12] | 张韬, 项祺, 郑婉文, 孙宇祥, 周献中. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968. |
| [13] | 密俊霞, 于会龙, 席军强. 基于MLP-SVM的驾驶员换道行为预测[J]. 兵工学报, 2022, 43(12): 3020-3029. |
| [14] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [15] | 赵鹏程, 宋保维, 毛昭勇, 丁文俊. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4