
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3269-3278.doi: 10.12382/bgxb.2023.0730
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LIAO Junbei1, YI Shuowen1, LEI Fei1, LIU Siyu1, GUO Zhao1,*( ), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3
), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3
Received:2023-08-08
Online:2023-11-01
Contact:
GUO Zhao
CLC Number:
LIAO Junbei, YI Shuowen, LEI Fei, LIU Siyu, GUO Zhao, WANG Zhirui, YAN Tong, DANG Ruina. Design and Modeling of a Bionic Joint with Continuously Variable Stiffness[J]. Acta Armamentarii, 2023, 44(11): 3269-3278.
Add to citation manager EndNote|Ris|BibTeX
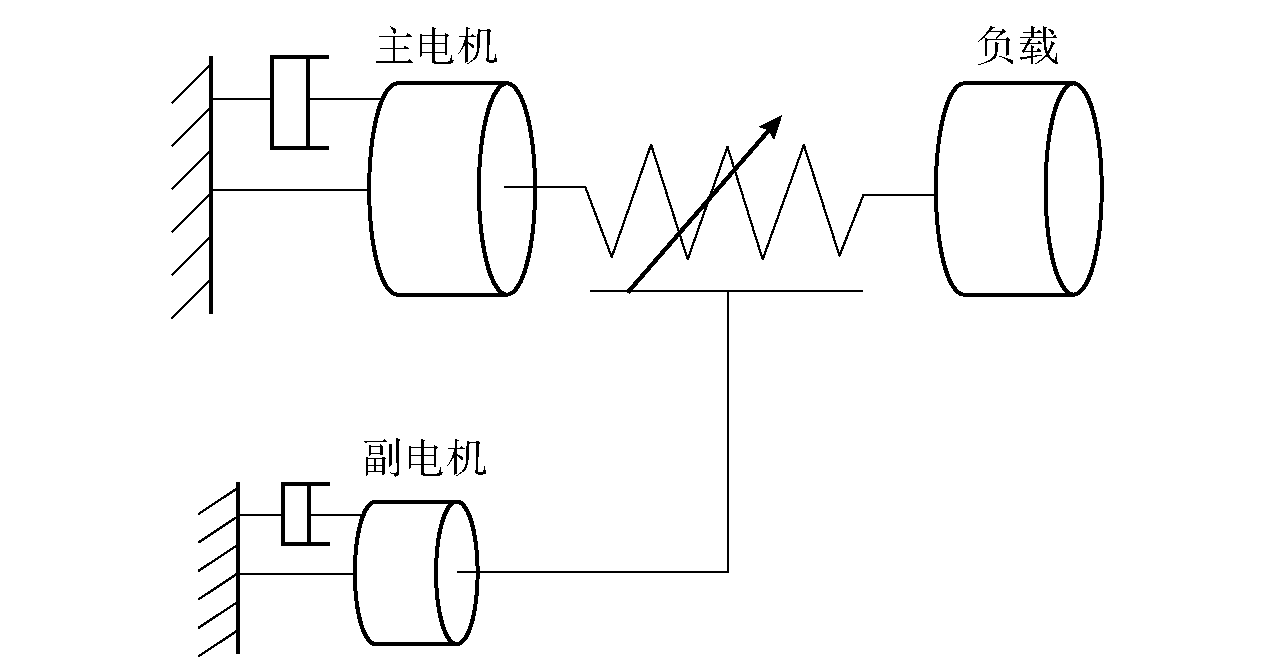
Fig.1 Schematic diagram of variable stiffness

Fig.2 Structural design
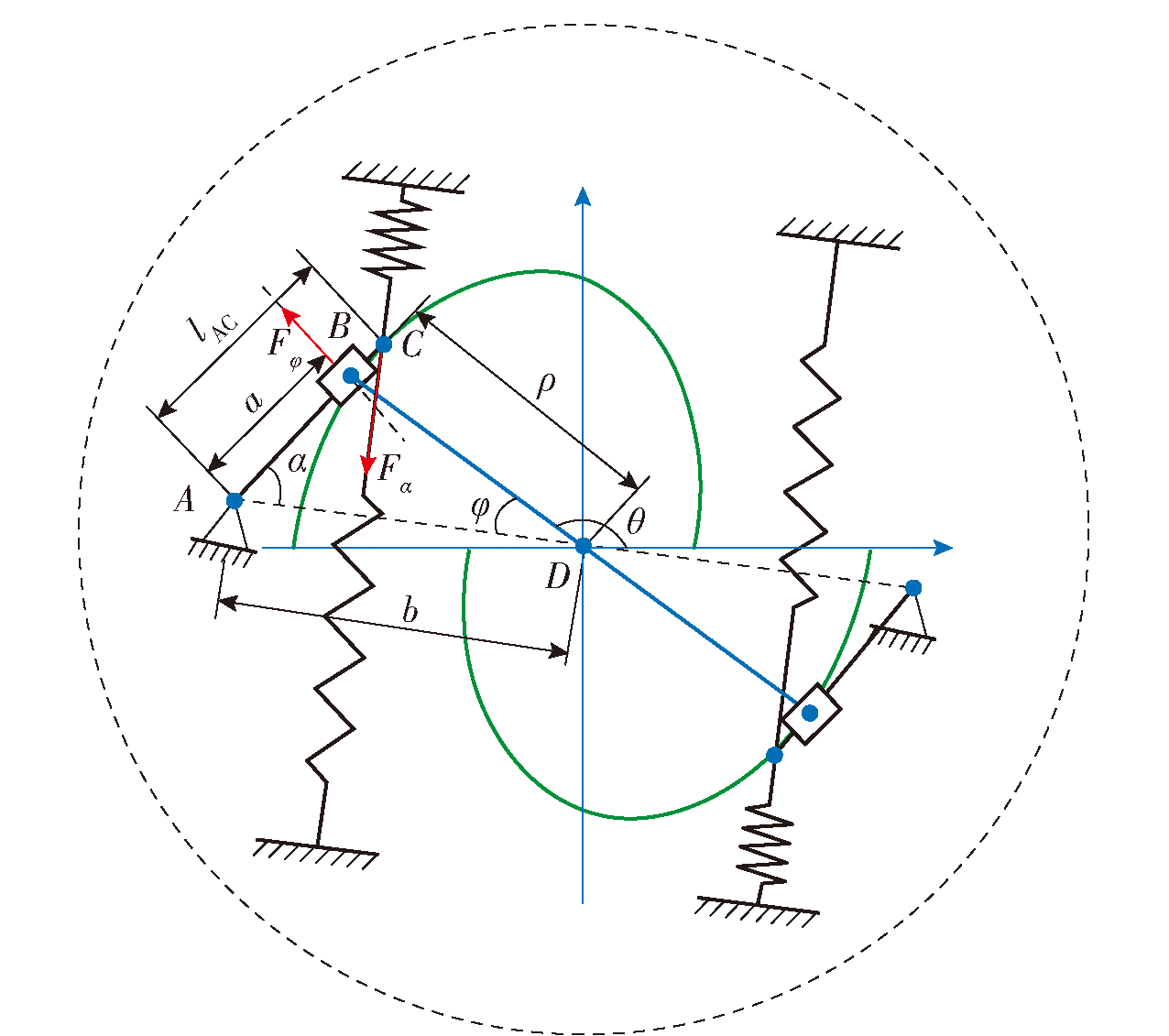
Fig.3 Principle of spring lever
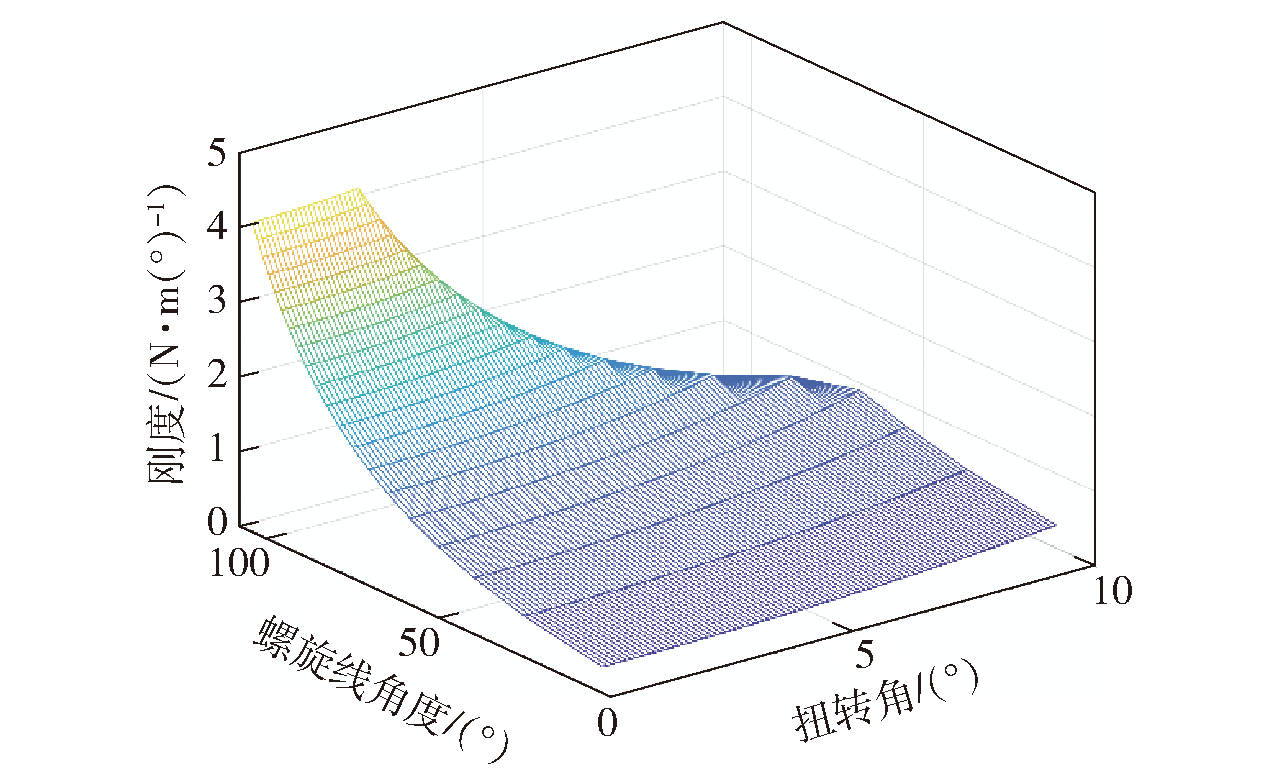
Fig.4 Stiffness versus deflection and spiral angles
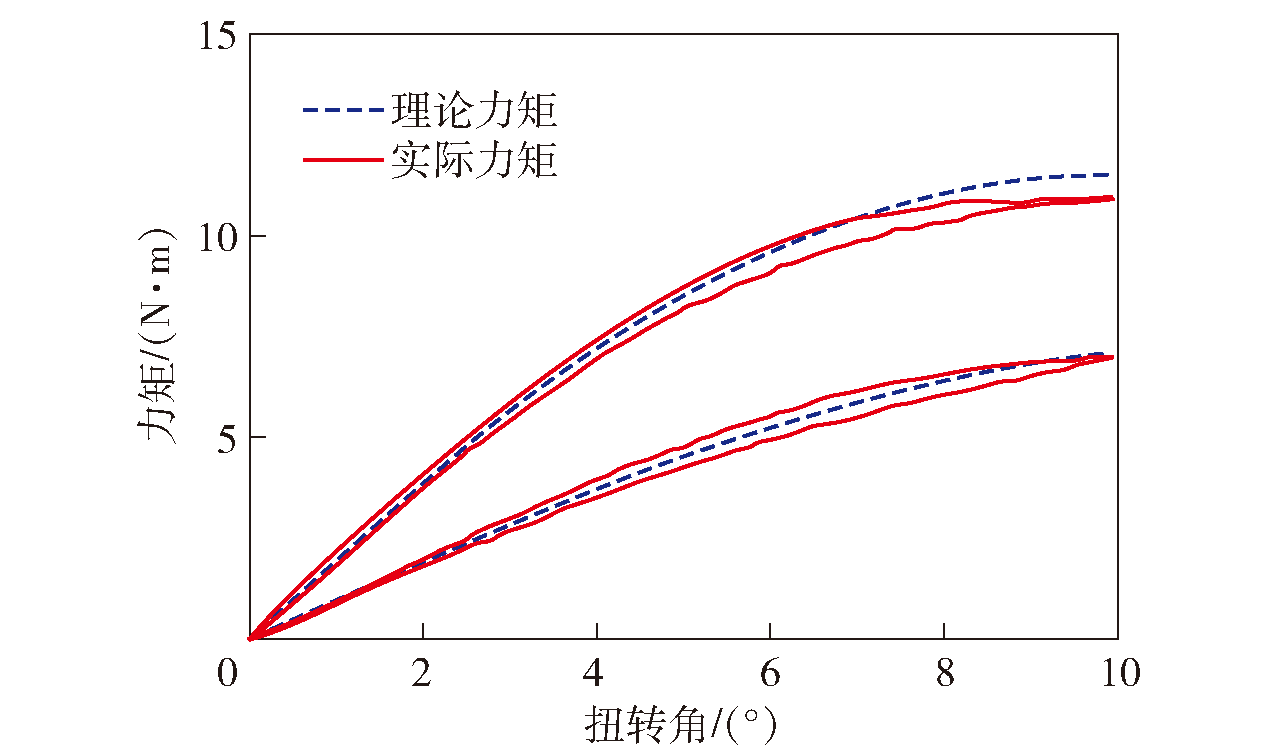
Fig.5 Relationship between torque and deflection
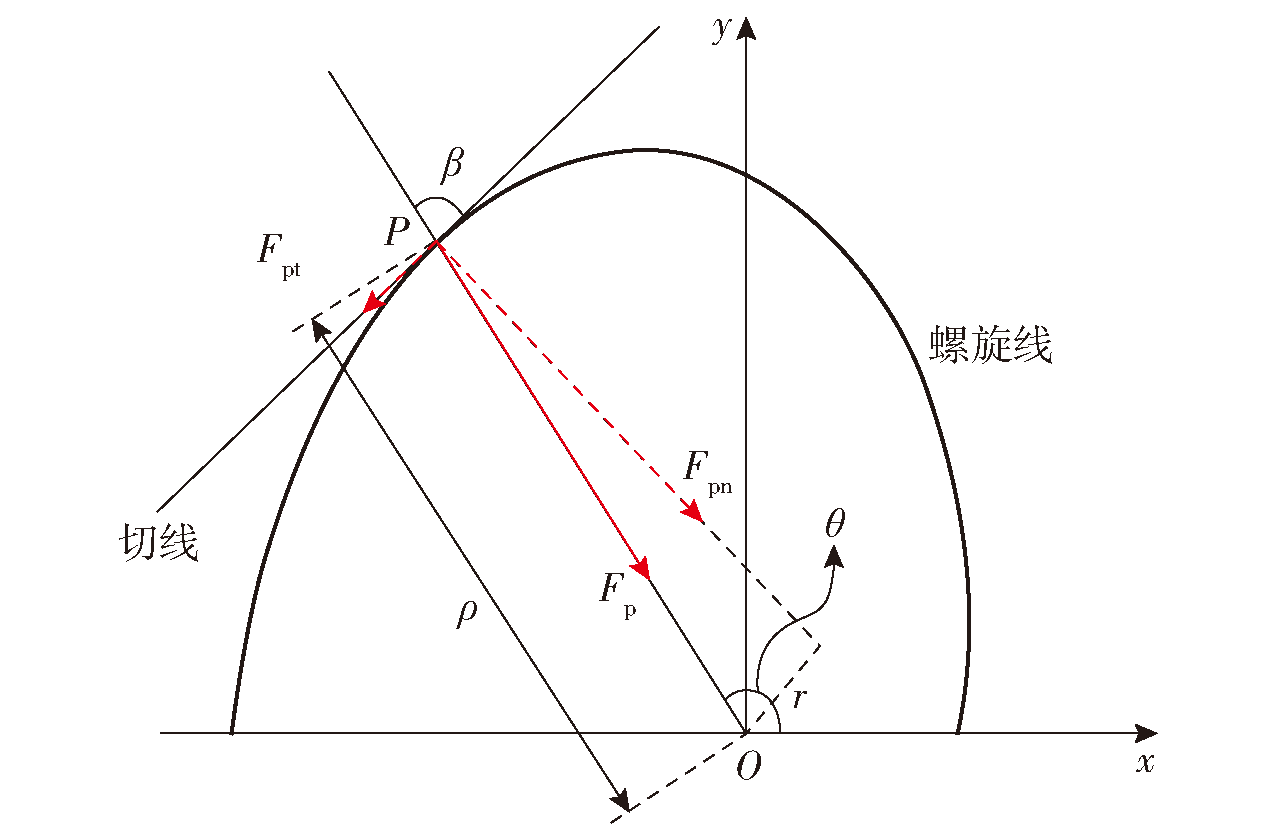
Fig.6 Torque analytical graph of Archimedean spiral gear

Fig.7 Relation of active torque and resistance torque
| 参数 | 取值 |
|---|---|
| 螺旋线齿轮齿数 | 78 |
| 副电机齿轮齿数 | 19 |
| 齿轮材料 | 45号钢 |
| 其他零件材料 | 6061合金 |
| 齿轮模数m/mm | 1 |
| 杠杆总长a/mm | 23 |
| 杠杆支点半径b/mm | 33 |
| 副电机额定输出扭矩/(N·m) | 3 |
| 主电机峰值输出扭矩/(N·m) | 23 |
| 副电机峰值输出扭矩/(N·m) | 3 |
| 驱动关节直径/mm | 110 |
| 驱动关节轴向长度/mm | 31 |
| 关节旋转角度/(°) | -120~120 |
| 弹性扭转角度/(°) | -10~10 |
| 弹簧劲度系数/(N·m) | 7440.5 |
| 副电机额定转速/(r·min-1) | 469 |
| 主电机额定转速/(r·min-1) | 80 |
Table 1 Parameters of bionic joint
| 参数 | 取值 |
|---|---|
| 螺旋线齿轮齿数 | 78 |
| 副电机齿轮齿数 | 19 |
| 齿轮材料 | 45号钢 |
| 其他零件材料 | 6061合金 |
| 齿轮模数m/mm | 1 |
| 杠杆总长a/mm | 23 |
| 杠杆支点半径b/mm | 33 |
| 副电机额定输出扭矩/(N·m) | 3 |
| 主电机峰值输出扭矩/(N·m) | 23 |
| 副电机峰值输出扭矩/(N·m) | 3 |
| 驱动关节直径/mm | 110 |
| 驱动关节轴向长度/mm | 31 |
| 关节旋转角度/(°) | -120~120 |
| 弹性扭转角度/(°) | -10~10 |
| 弹簧劲度系数/(N·m) | 7440.5 |
| 副电机额定转速/(r·min-1) | 469 |
| 主电机额定转速/(r·min-1) | 80 |

Fig.8 Prototype and experiment principle of VSA
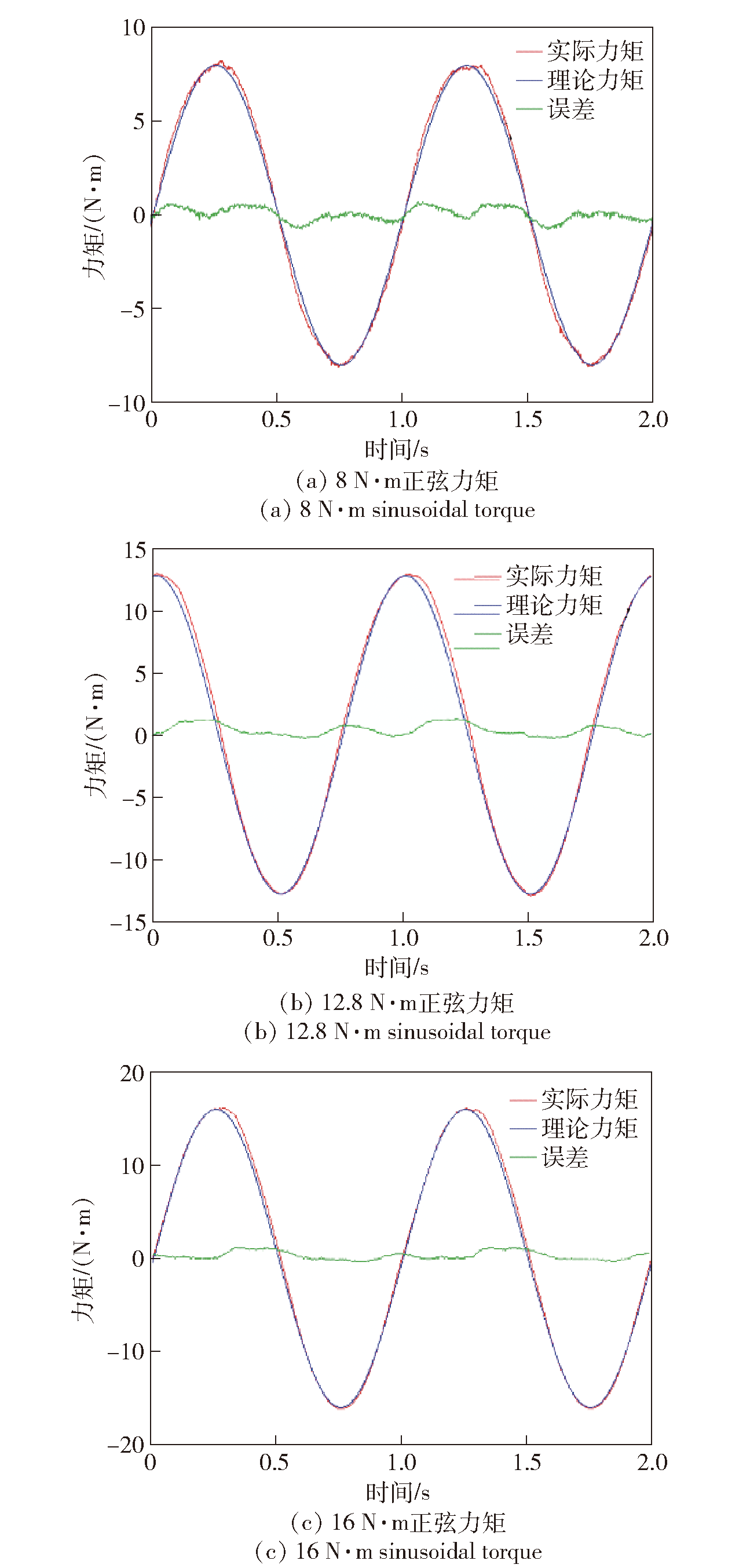
Fig.9 Sinusoidal torque experimental tracking results
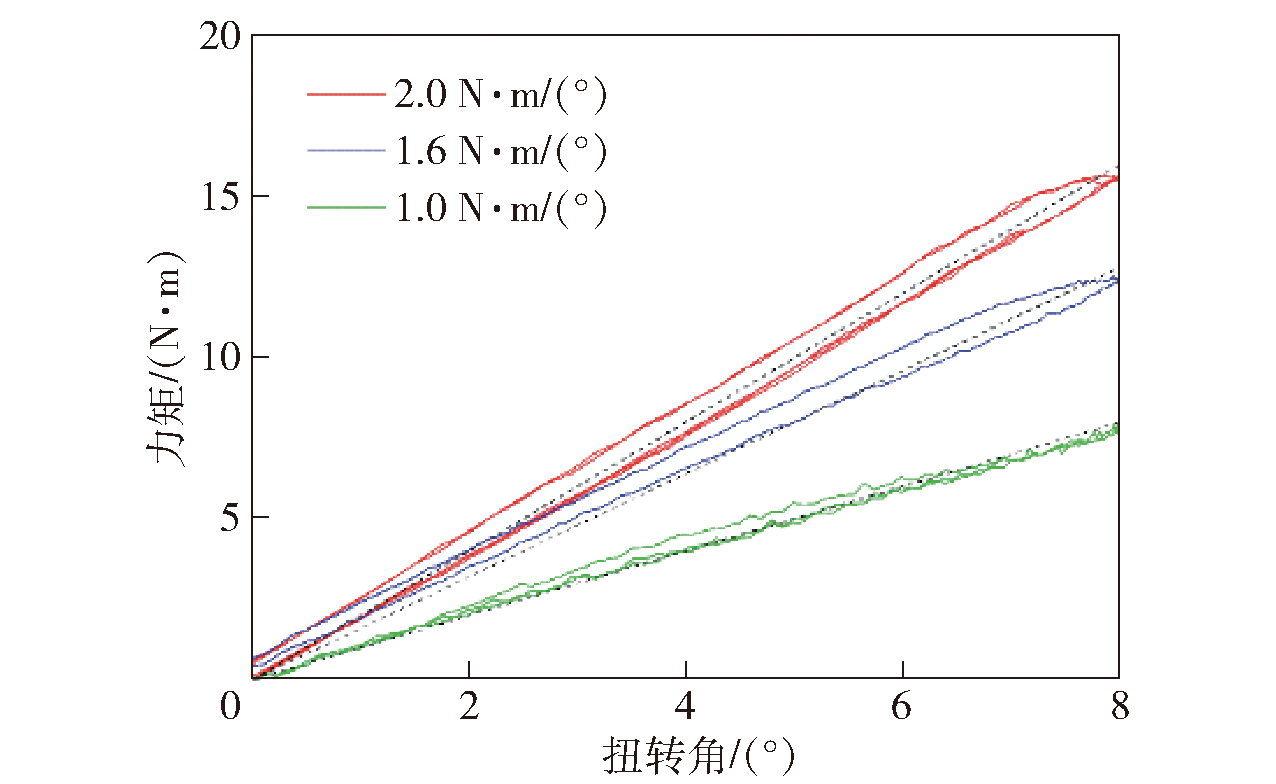
Fig.10 Comparison between the theoretical and actual torque
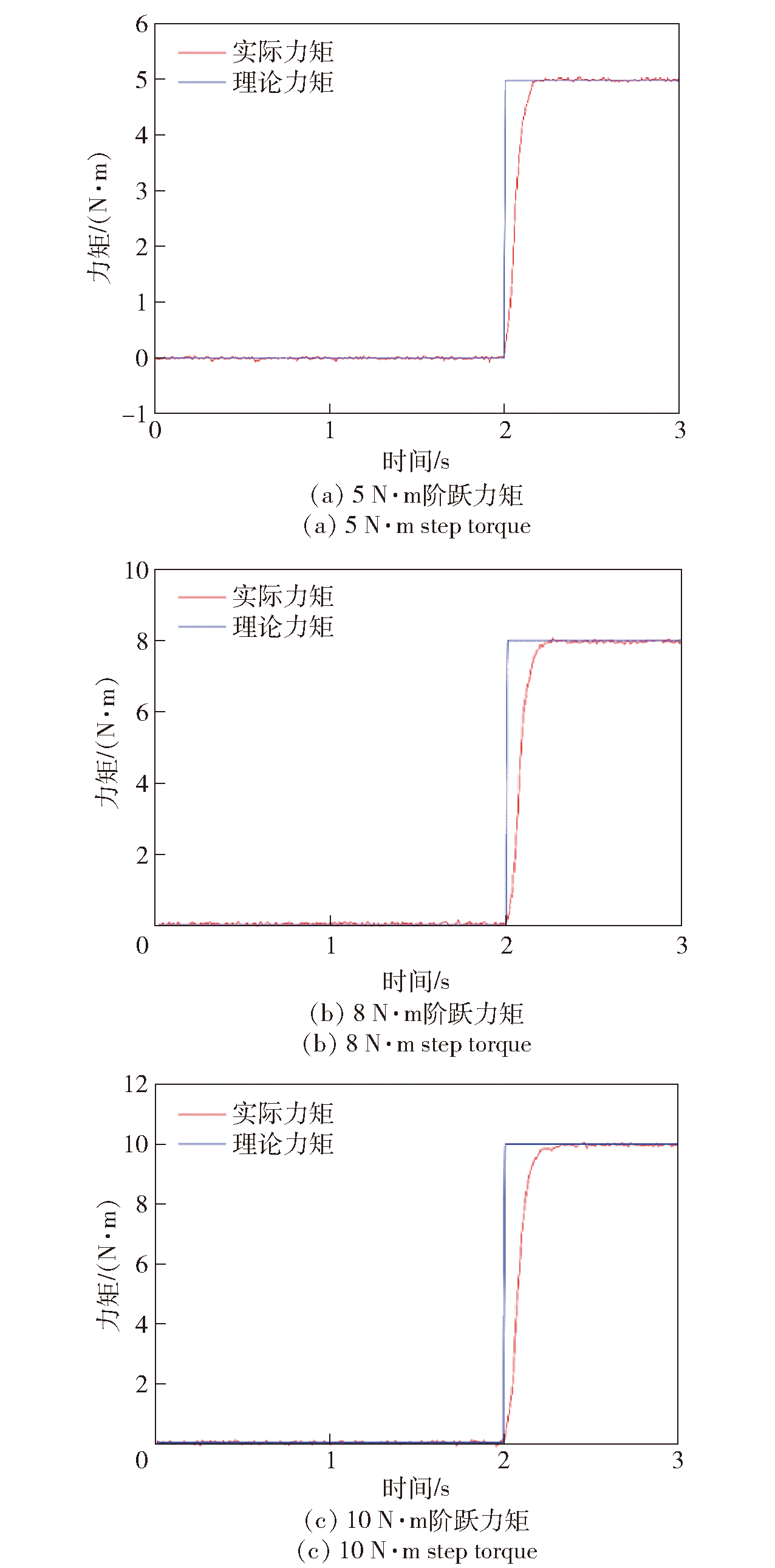
Fig.11 Step torque experimental tracking results
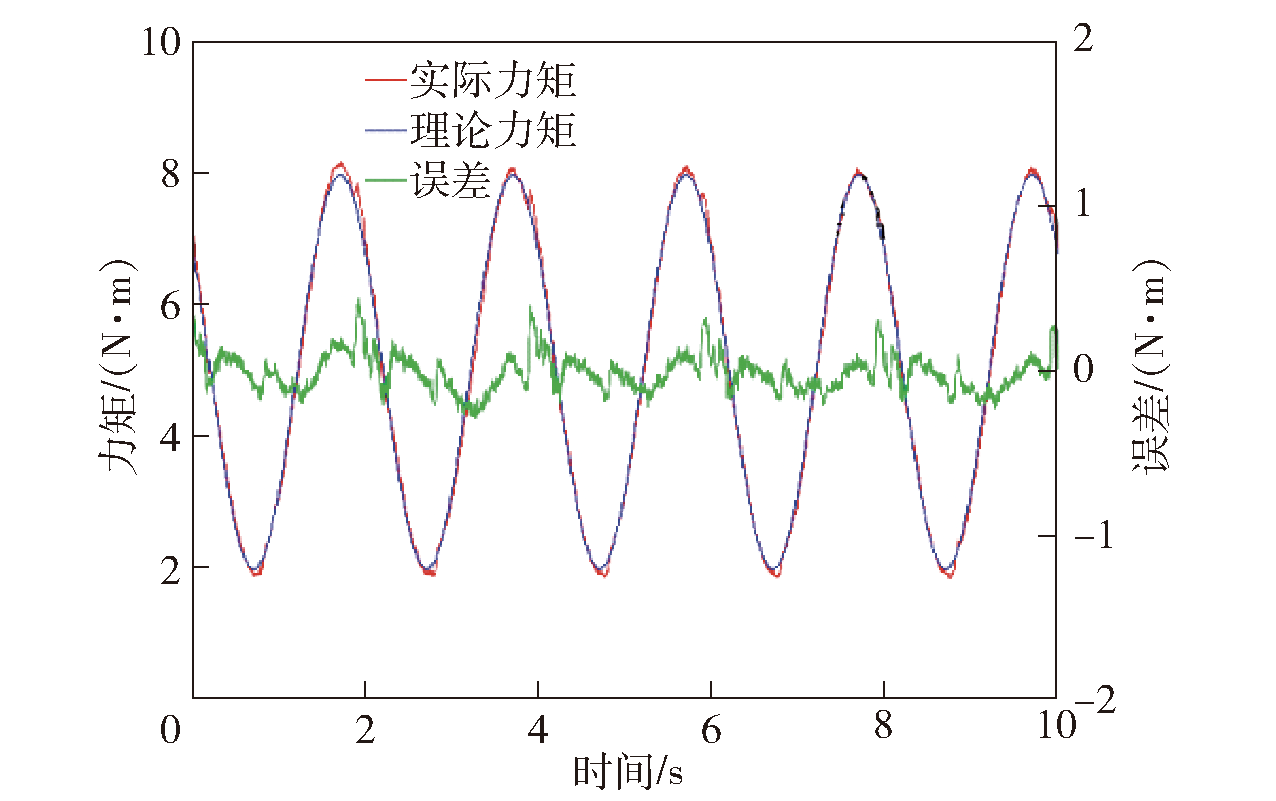
Fig.12 Stiffness tracking experiment
| 名称 | 输出端直径/mm | 最大输出力矩/(N·m) | 输出刚度特性 | 质量/kg | 刚度范围/(N·m·rad-1) |
|---|---|---|---|---|---|
| 仿生驱动关节 | 110 | 23 | 线性 | 1.6 | 17.20~286.62 |
| AwAS[ | 130 | 80 | 1.8 | 30~1300 | |
| b-b VSA[ | 3 | 非线性 | 0.7~1.86 | ||
| HVSA | 17 | 非线性 | 2.36 | 4.01~126.05 | |
| SVSA[ | 140 | 22.1 | 非线性 | 2.4 | 1.7~150.56 |
| ESPaa[ | 66 | 6.1 | 非线性 | 0.45 | 0.35~35 |
Table 2 Performance comparison of each VSA
| 名称 | 输出端直径/mm | 最大输出力矩/(N·m) | 输出刚度特性 | 质量/kg | 刚度范围/(N·m·rad-1) |
|---|---|---|---|---|---|
| 仿生驱动关节 | 110 | 23 | 线性 | 1.6 | 17.20~286.62 |
| AwAS[ | 130 | 80 | 1.8 | 30~1300 | |
| b-b VSA[ | 3 | 非线性 | 0.7~1.86 | ||
| HVSA | 17 | 非线性 | 2.36 | 4.01~126.05 | |
| SVSA[ | 140 | 22.1 | 非线性 | 2.4 | 1.7~150.56 |
| ESPaa[ | 66 | 6.1 | 非线性 | 0.45 | 0.35~35 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
doi: 10.1016/j.asej.2020.11.005 URL |
| [5] |
doi: 10.1007/s11431-013-5443-7 URL |
| [6] |
丁良宏. BigDog四足机器人关键技术分析[J]. 机械工程学报, 2015, 51(7): 1-23.
doi: 10.3901/JME.2015.07.001 |
|
doi: 10.3901/JME.2015.07.001 |
|
| [7] |
|
| [8] |
doi: 10.1038/s41598-021-88879-0 pmid: 33953253 |
| [9] |
doi: 10.1108/IR-11-2014-0422 URL |
| [10] |
李庆中, 李晓丹, 于福杰, 等. 介电弹性体式蛙型仿生软体机器人设计[J]. 兵工学报, 2022, 43(1): 140-147.
|
|
doi: 10.3969/j.issn.1000-1093.2022.01.015 |
|
| [11] |
doi: 10.1109/TMECH.2022.3224423 URL |
| [12] |
|
| [13] |
刘畅, 毕树生, 赵宏哲, 等. 基于折叠式串联簧片的可调刚度致动器设计[J]. 机械工程学报, 2017, 53(17): 70-77.
doi: 10.3901/JME.2017.17.070 |
|
doi: 10.3901/JME.2017.17.070 |
|
| [14] |
doi: 10.1109/TMECH.3516 URL |
| [15] |
|
| [16] |
doi: 10.1016/j.robot.2007.05.013 URL |
| [17] |
doi: 10.1016/j.rcim.2019.101886 URL |
| [18] |
王伟, 刘立冬, 魏来, 等. 柔性齿条式变刚度关节驱动器设计与研究[J]. 机械工程学报, DOI: 10.3901/JME.2016.01.026.
|
|
|
|
| [19] |
doi: 10.1109/TMECH.2015.2501019 URL |
| [20] |
|
| [21] |
doi: 10.1016/j.mechmachtheory.2021.104323 URL |
| [22] |
doi: 10.1016/j.mechmachtheory.2019.05.016 URL |
| [23] |
doi: 10.1109/TMECH.2014.2321428 URL |
| [24] |
|
| [25] |
doi: 10.1109/TMECH.2012.2218615 URL |
| [26] |
|
| [27] |
孙剑韬, 周江琛, 郭朝, 等. 面向柔性机器人的串联式变刚度驱动器设计[J]. 华中科技大学学报(自然科学版), 2019, 47(1): 7-12.
|
|
|
|
| [28] |
doi: 10.1109/TMECH.3516 URL |
| [29] |
doi: 10.1016/j.mechmachtheory.2021.104716 URL |
| [30] |
doi: 10.1109/LSP.2016. URL |
| [31] |
doi: 10.1109/TMECH.2021.3055364 URL |
| [1] | PAN Zuodong, ZHOU Yue , GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [2] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Four-Wheeled Legged Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 0, (): 0-0. |
| [3] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 0, (): 0-0. |
| [4] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [5] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [6] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [7] | SU Zhibao, XIANG Shen, YU Xuewei, AN Xuyang. A Simulation System for Cooperative Control of Autonomous Convoy [J]. Acta Armamentarii, 2023, 44(S2): 35-43. |
| [8] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [9] | LIU Siyu, LIAO Junbei, LEI Fei, WANG Zhirui, YAN Tong, DANG Ruina, GUO Zhao. Design and Optimization of a Parallel Elastic Actuator Leg for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 71-83. |
| [10] | JIANG Chenxing, YAO Qichang, XU Peng, ZHOU Yuting, YAN Tong. The Transformation of Quadruped and Biped Robot Technologies under the New Technological Situation [J]. Acta Armamentarii, 2023, 44(S2): 84-89. |
| [11] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [12] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [13] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [14] | LIU Yali, LU Yanchi, XU Xiaolong, SONG Qiuzhi. A Review of the Evaluation Methods and Applications of Assisting Effectiveness of Exoskeleton Robot [J]. Acta Armamentarii, 0, (): 0-0. |
| [15] | CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method [J]. Acta Armamentarii, 2023, 44(11): 3345-3358. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||