
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3345-3358.doi: 10.12382/bgxb.2023.0547
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
CAO Haozhe1,*( ), LIU Quanpan2
), LIU Quanpan2
Received:2023-06-01
Online:2023-08-28
Contact:
CAO Haozhe
CLC Number:
CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method[J]. Acta Armamentarii, 2023, 44(11): 3345-3358.
Add to citation manager EndNote|Ris|BibTeX
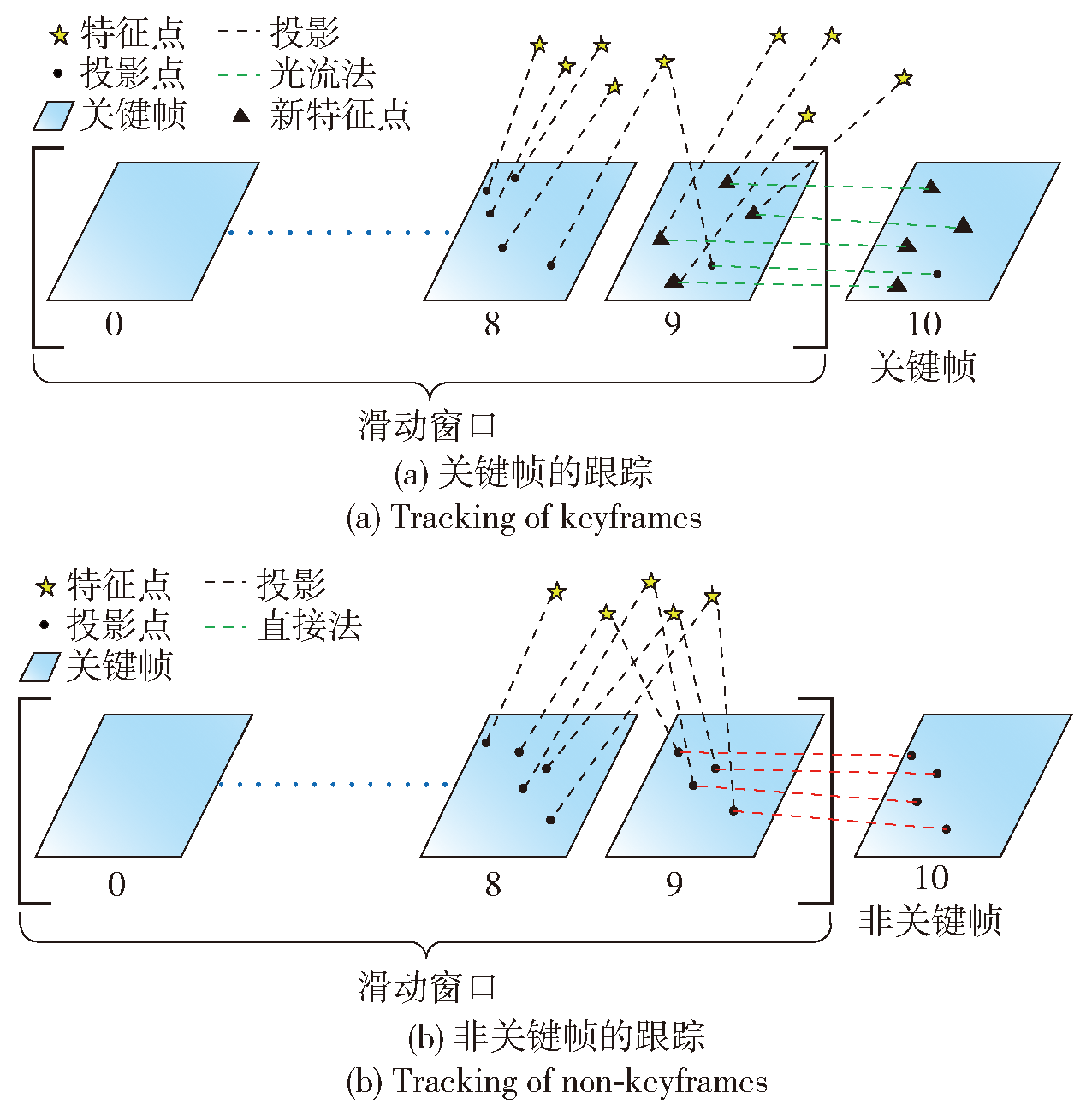
Fig.1 Tracking of keyframes and non-keyframes

Fig.2 Direct image alignment

Fig.3 Alignment of non-keyframes with local map
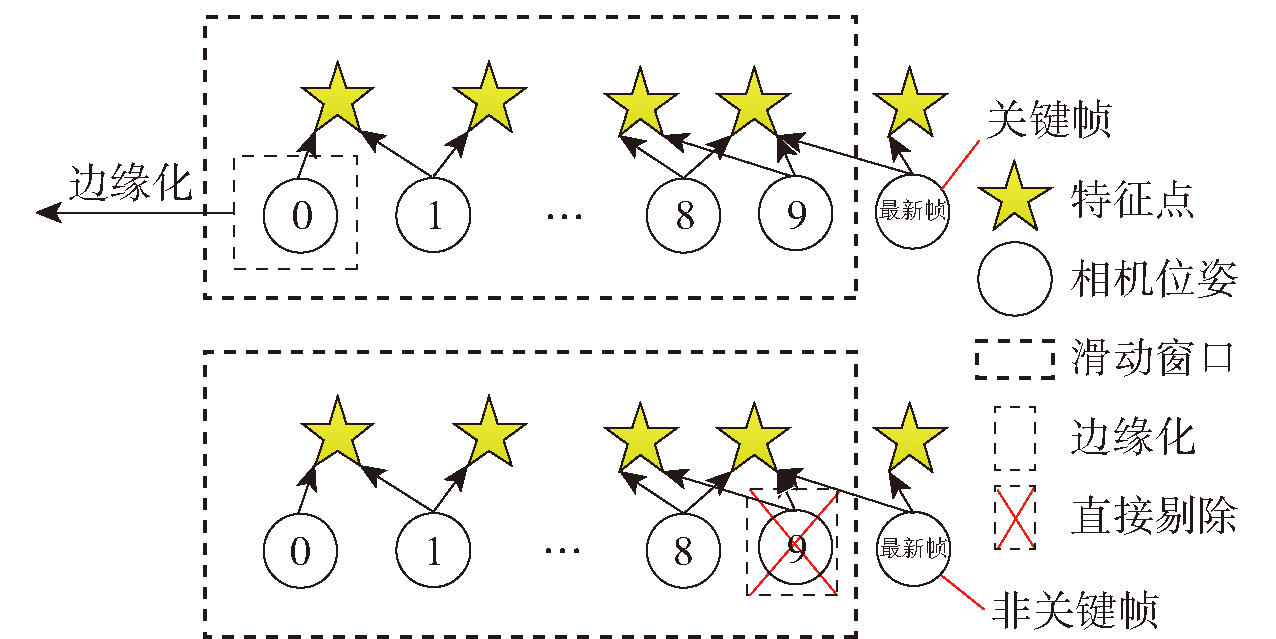
Fig.4 Marginalization strategy
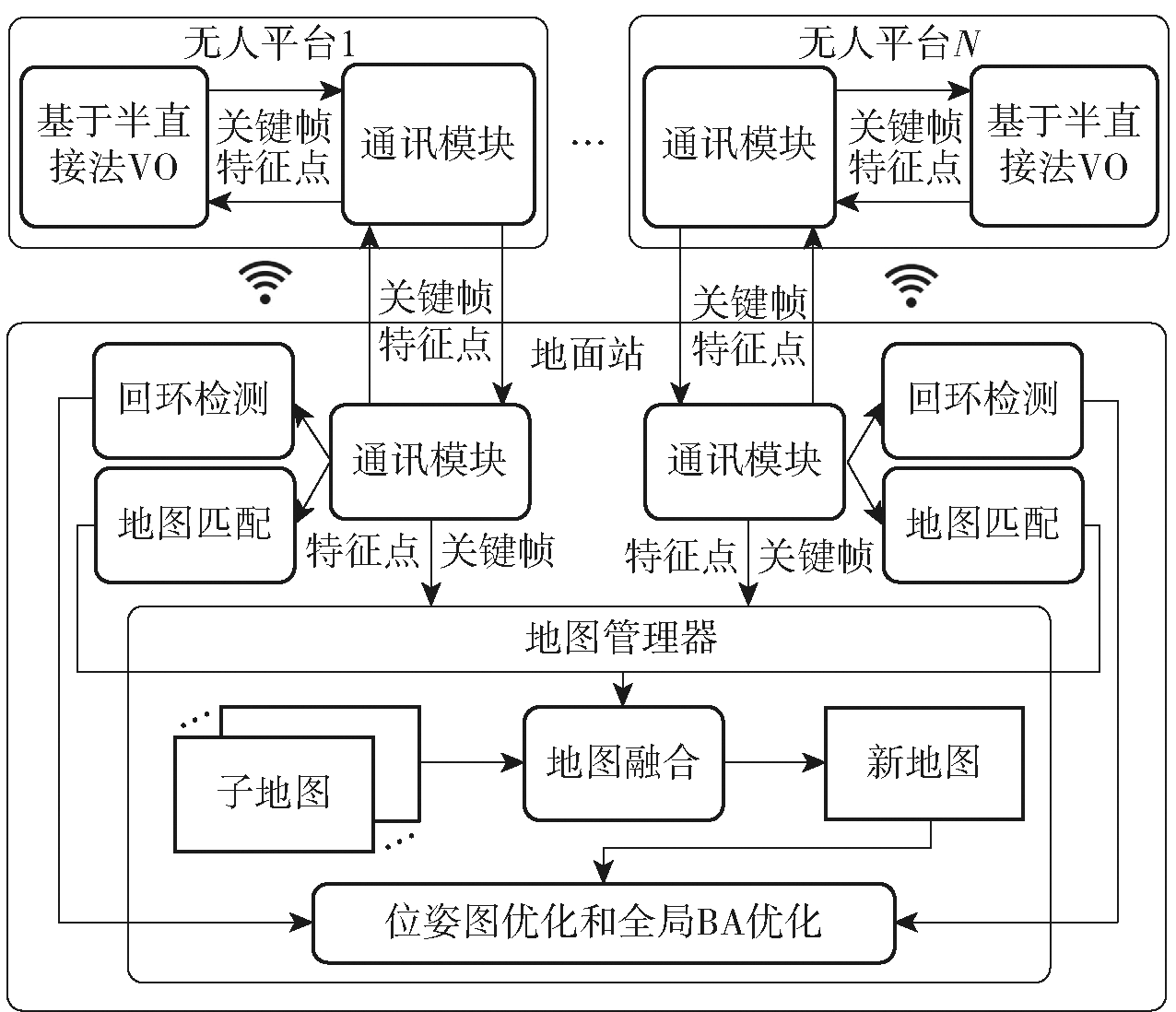
Fig.5 Framework of collaborative SLAM algorithm based on semi-direct method
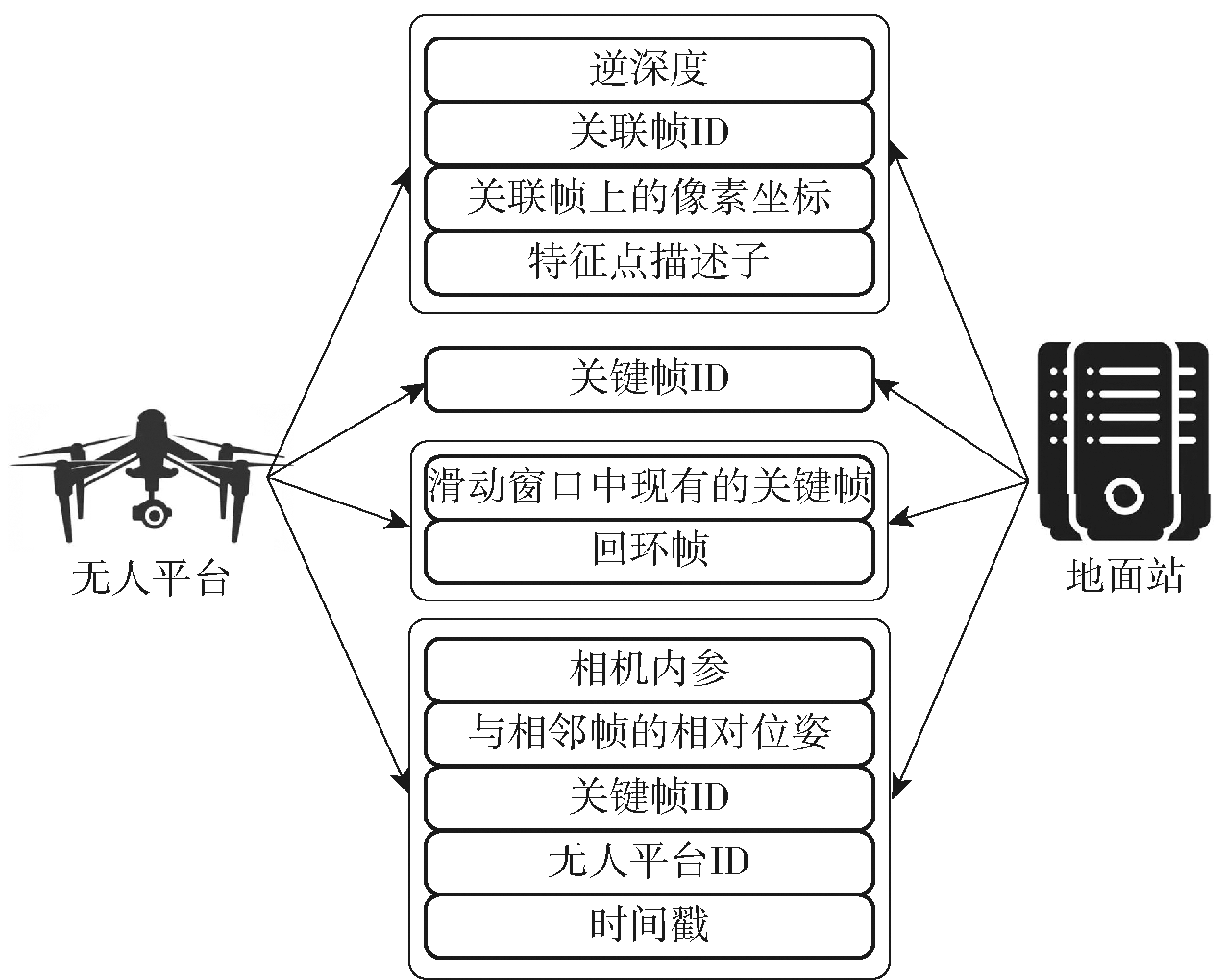
Fig.6 Interactive information of unmanned platform and ground station
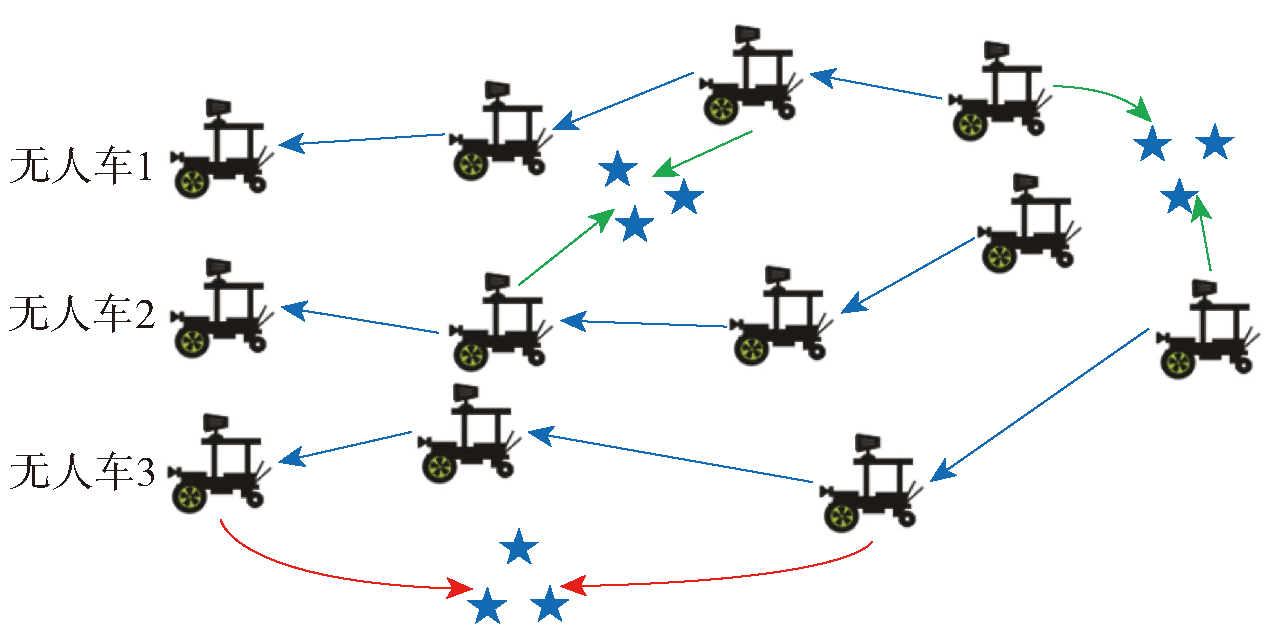
Fig.7 Schematic diagram of three unmanned vehicles running at the same time
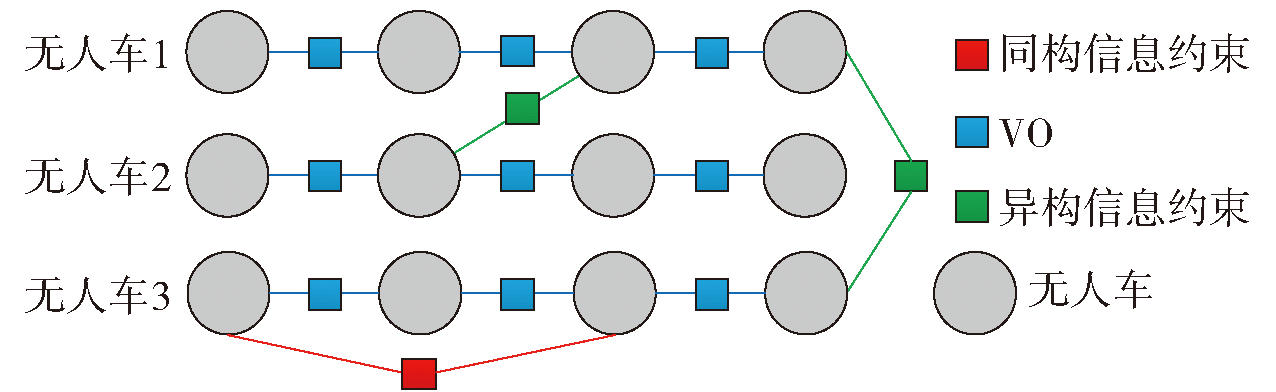
Fig.8 Factor graph representation of three unmanned vehicles running at the same time

Fig.9 Comparison of trajectories and point cloud maps before and after loop closure detection triggering

Fig.10 Map matching

Fig.11 Comparison of trajectories and point cloud maps before and after loop closure detection triggering
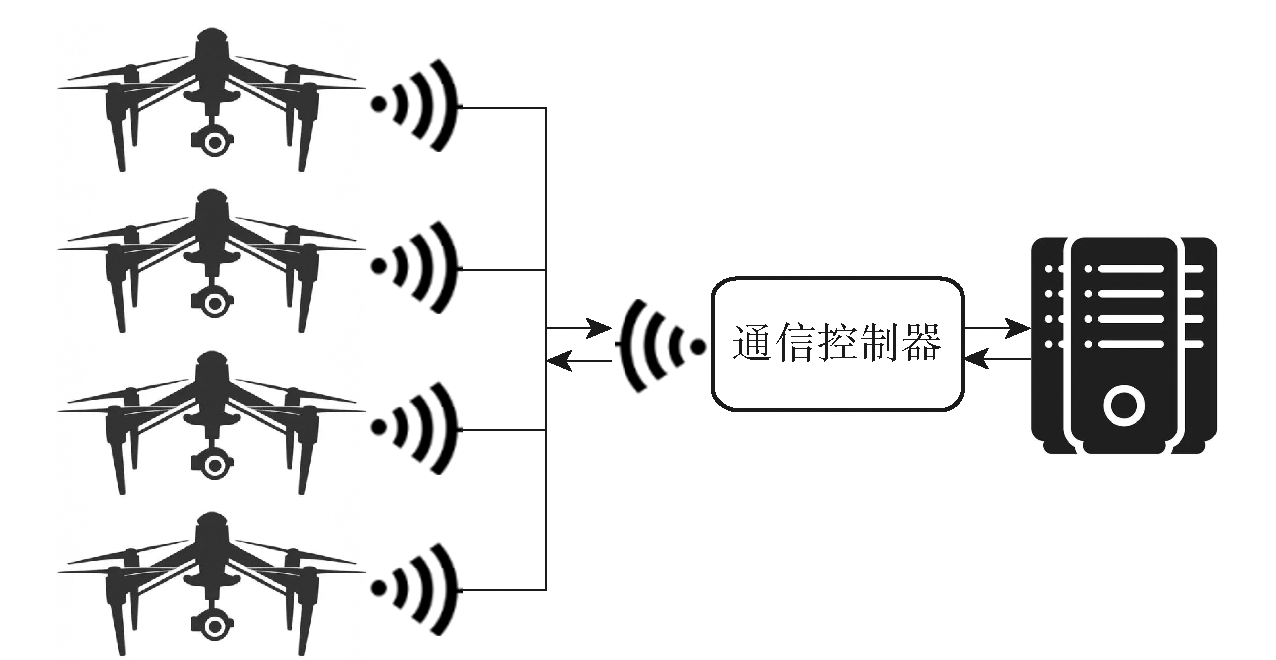
Fig.12 Communication controller
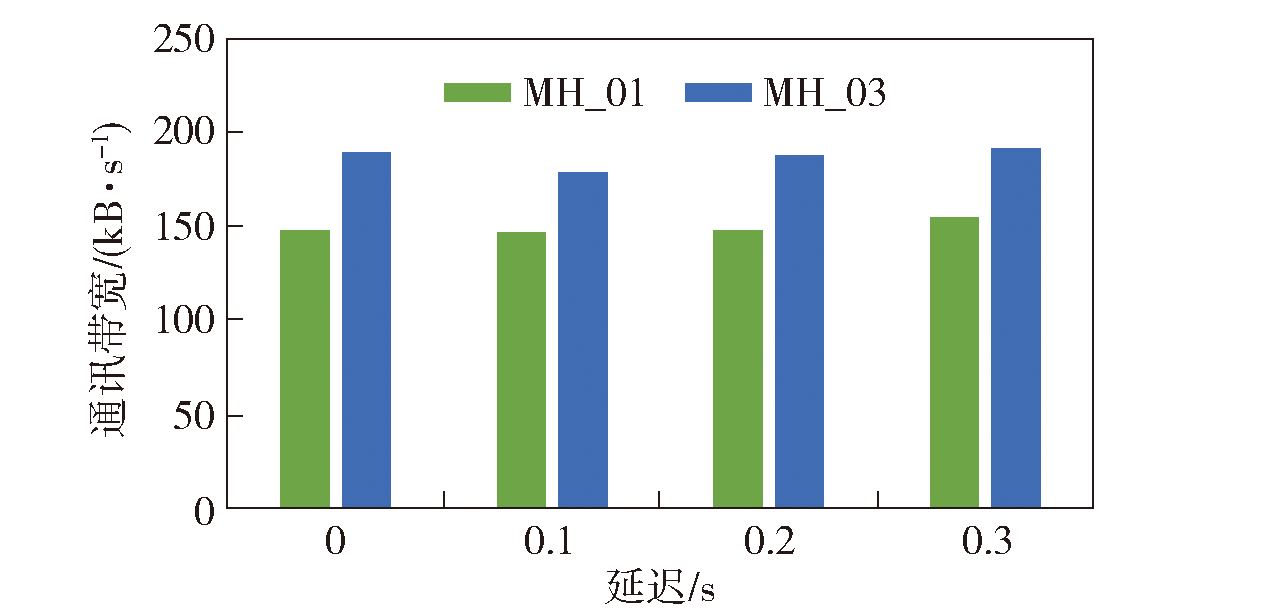
Fig.13 Communication bandwidth from the unmanned platforms to the ground station under communication delay
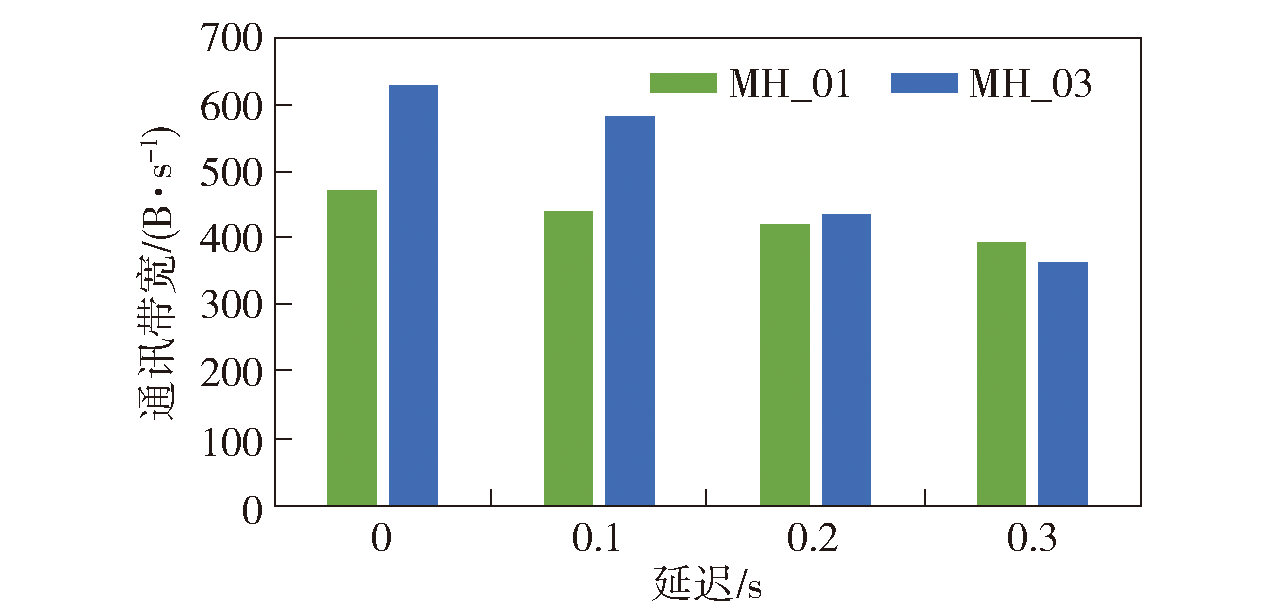
Fig.14 Communication bandwidth from the ground station to the unmanned platforms under communication delay

Fig.15 Communication bandwidth from the unmanned platforms to the ground station under communication interference
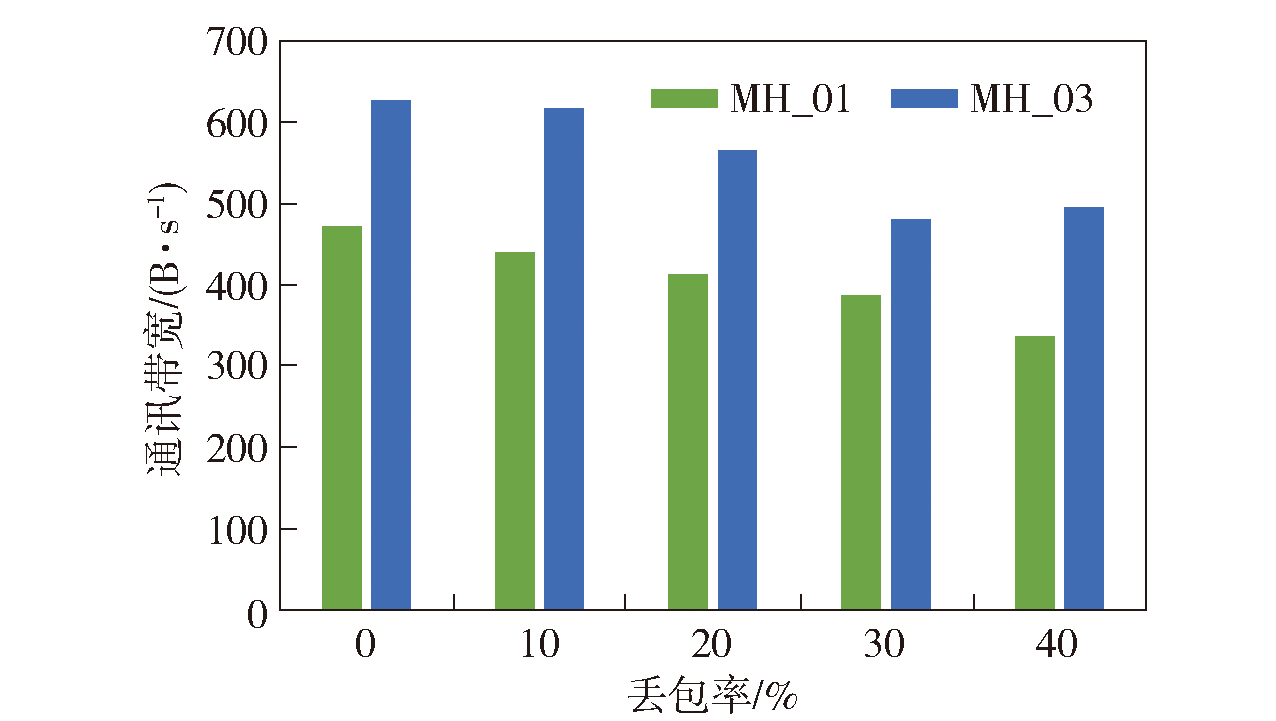
Fig.16 Communication bandwidth from the ground station to the unmanned platforms under communication interference
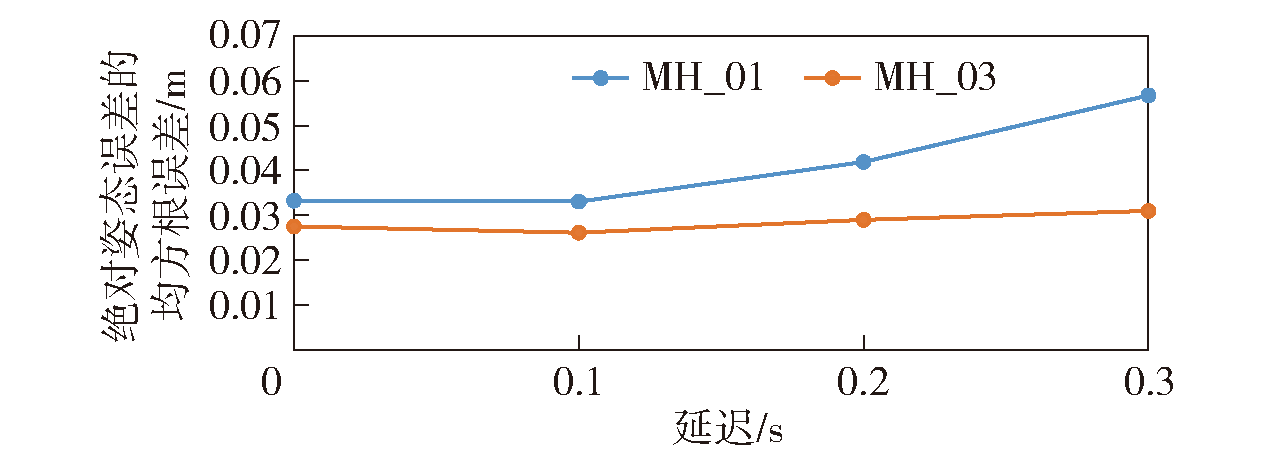
Fig.17 Effect of communication delay on positioning accuracy
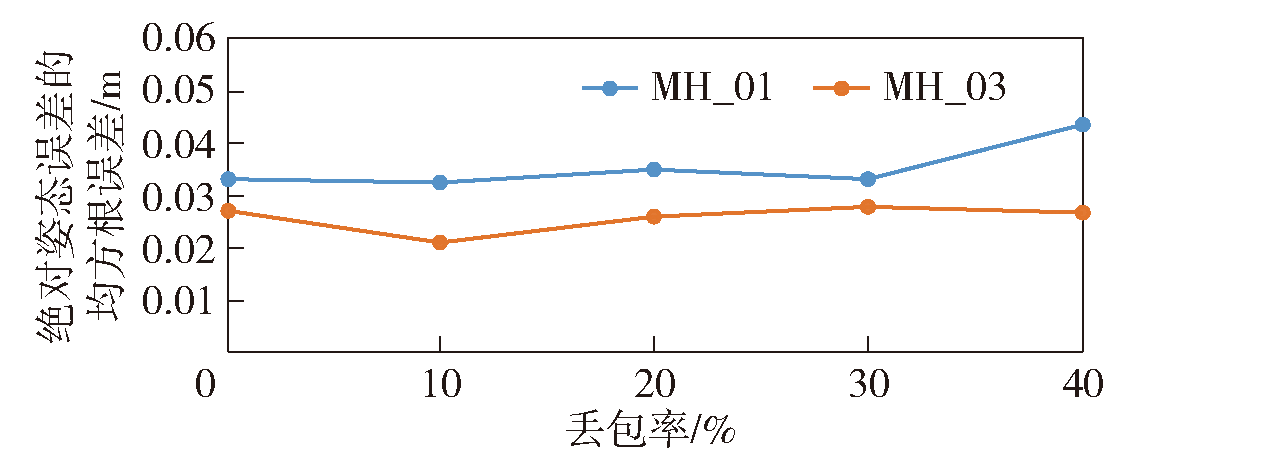
Fig.18 Effect of communication interference on positioning accuracy
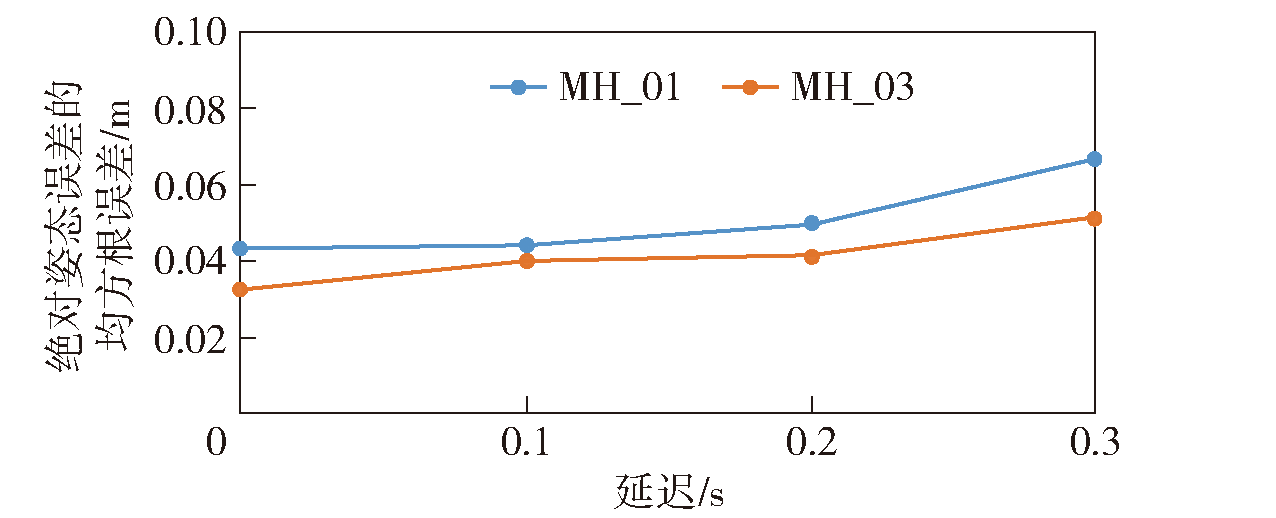
Fig.19 Effect of communication delay on positioning accuracy (communication interference: 40%)
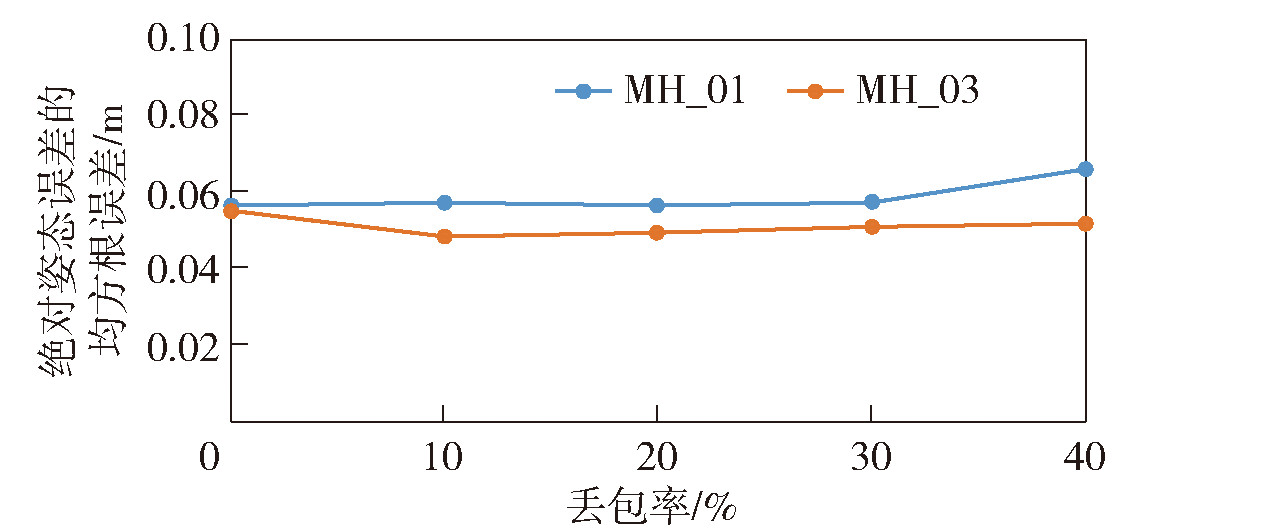
Fig.20 Effect of communication interference on positioning accuracy (communication delay: 0.3s)

Fig.21 Point cloud maps of EuRoC dataset
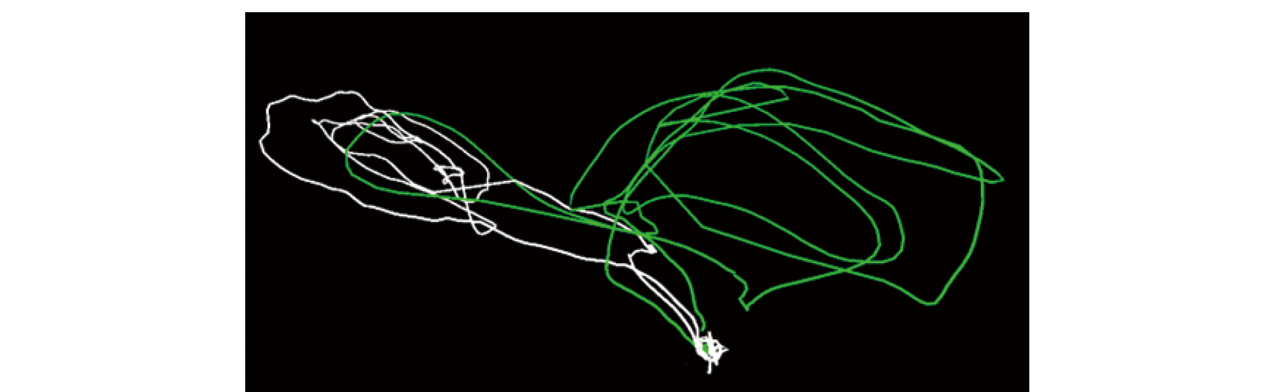
Fig.22 Trajectories of EuRoC dataset

Fig.23 Point cloud maps and trajectories of EuRoC dataset
| 算法 | 数据集 | |||||
|---|---|---|---|---|---|---|
| MH_01 | MH_02 | MH_03 | V2_01 | V2_02 | ||
| DSO | 0.057 | 0.092 | 0.198 | 0.077 | 0.095 | |
| COVINS | 0.041 | 0.060 | 0.056 | 0.042 | 0.053 | |
| CCM-SLAM | 0.106 | 0.092 | 0.156 | 0.202 | 0.098 | |
| Agent1 | 0.035 | 0.056 | ||||
| 无协同 | Agent2 | 0.032 | 0.087 | |||
| Agent3 | 0.029 | |||||
| 协同 | 0.028 | 0.030 | 0.027 | 0.047 | 0.062 | |
Table 1 Comparison of positioning accuracy m
| 算法 | 数据集 | |||||
|---|---|---|---|---|---|---|
| MH_01 | MH_02 | MH_03 | V2_01 | V2_02 | ||
| DSO | 0.057 | 0.092 | 0.198 | 0.077 | 0.095 | |
| COVINS | 0.041 | 0.060 | 0.056 | 0.042 | 0.053 | |
| CCM-SLAM | 0.106 | 0.092 | 0.156 | 0.202 | 0.098 | |
| Agent1 | 0.035 | 0.056 | ||||
| 无协同 | Agent2 | 0.032 | 0.087 | |||
| Agent3 | 0.029 | |||||
| 协同 | 0.028 | 0.030 | 0.027 | 0.047 | 0.062 | |
| 算法 | 数据集 | ||||
|---|---|---|---|---|---|
| MH_01 | MH_02 | MH_03 | V2_01 | V2_02 | |
| CCM-SLAM | 37.82 | 35.31 | 34.20 | 38.57 | 31.13 |
| COVINS | 17.67 | 13.60 | 12.28 | 13.83 | 13.04 |
| 本文算法 | 6.72 | 6.58 | 7.87 | 7.51 | 10.22 |
Table 2 Average time spent tracking a frame of image ms
| 算法 | 数据集 | ||||
|---|---|---|---|---|---|
| MH_01 | MH_02 | MH_03 | V2_01 | V2_02 | |
| CCM-SLAM | 37.82 | 35.31 | 34.20 | 38.57 | 31.13 |
| COVINS | 17.67 | 13.60 | 12.28 | 13.83 | 13.04 |
| 本文算法 | 6.72 | 6.58 | 7.87 | 7.51 | 10.22 |
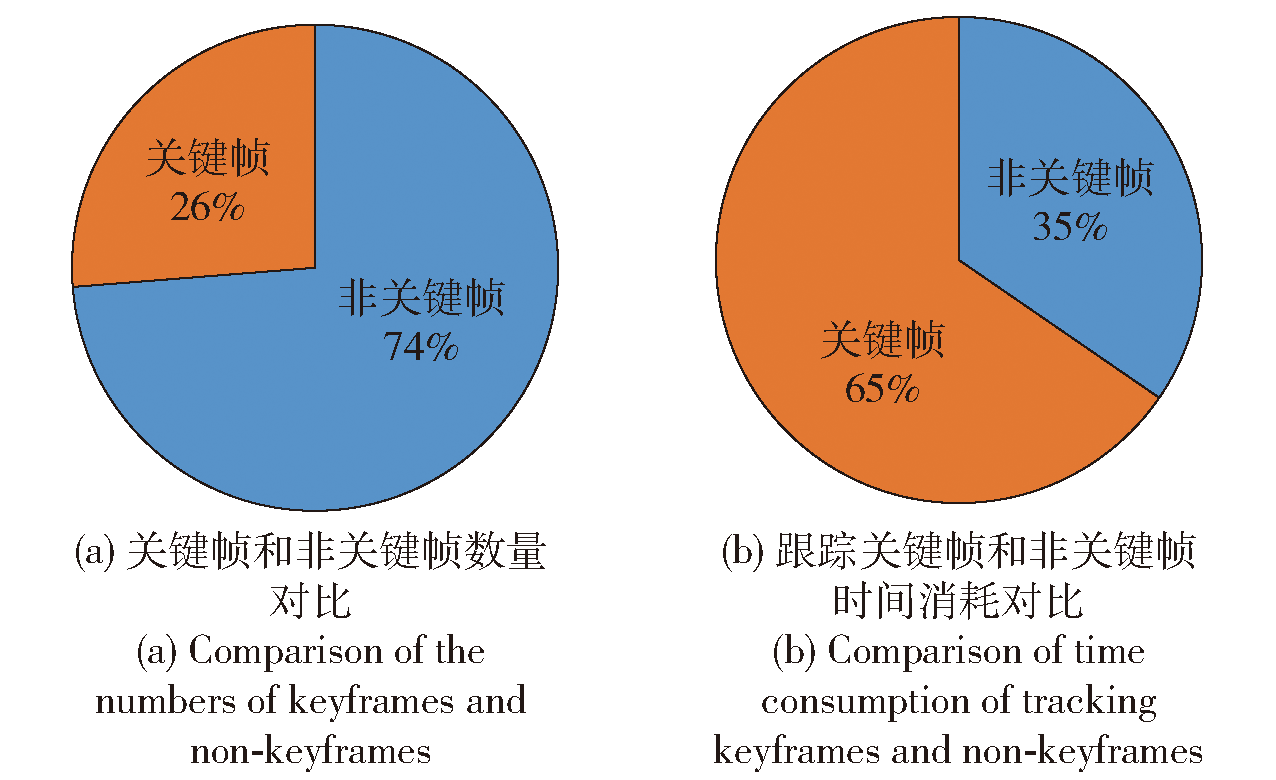
Fig.24 Comparison of keyframes and non-keyframes in number and tracking time consumption

Fig.25 Real environment experiment
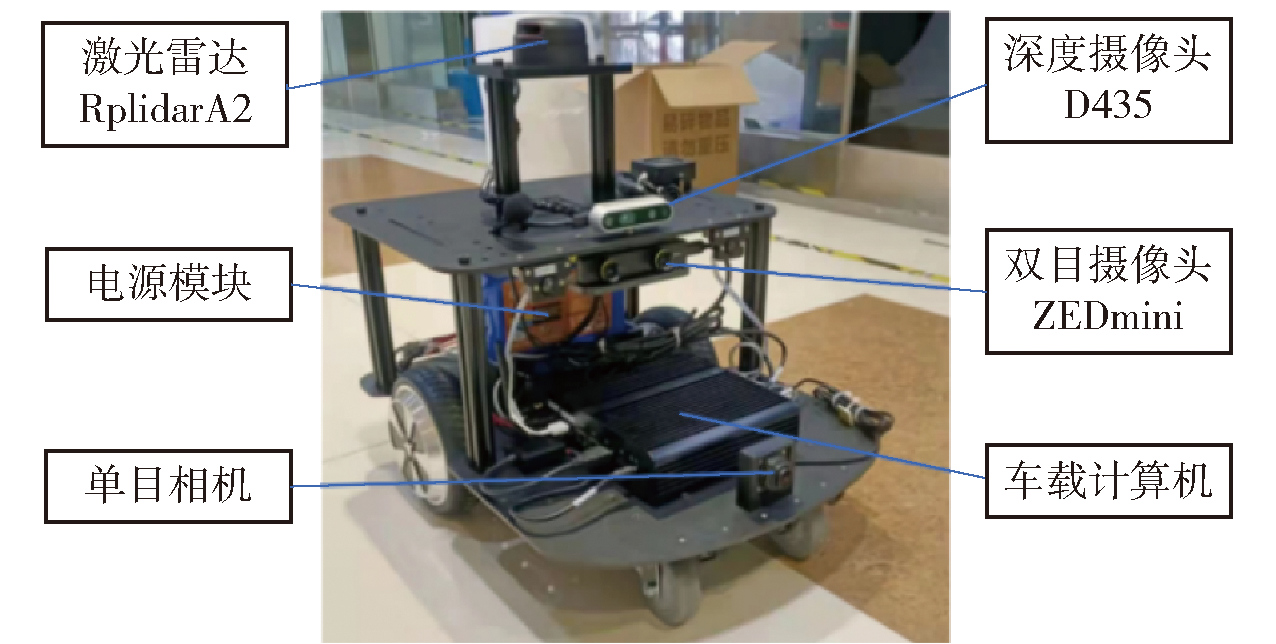
Fig.26 SLAM algorithm test system for ground unmanned platform

Fig.27 Trajectories and point cloud maps constructed by two unmanned vehicles in an indoor environment
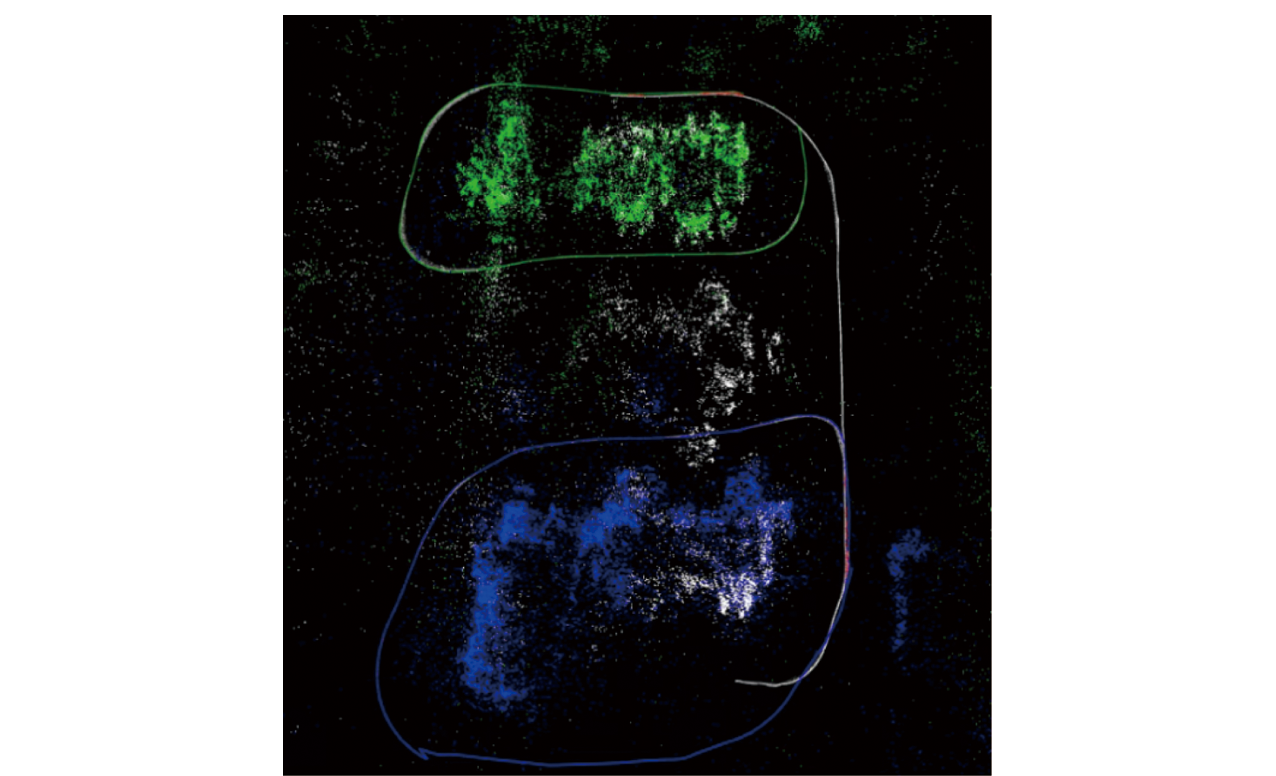
Fig.28 Trajectories and point cloud maps constructed by three unmanned vehicles in an indoor environment
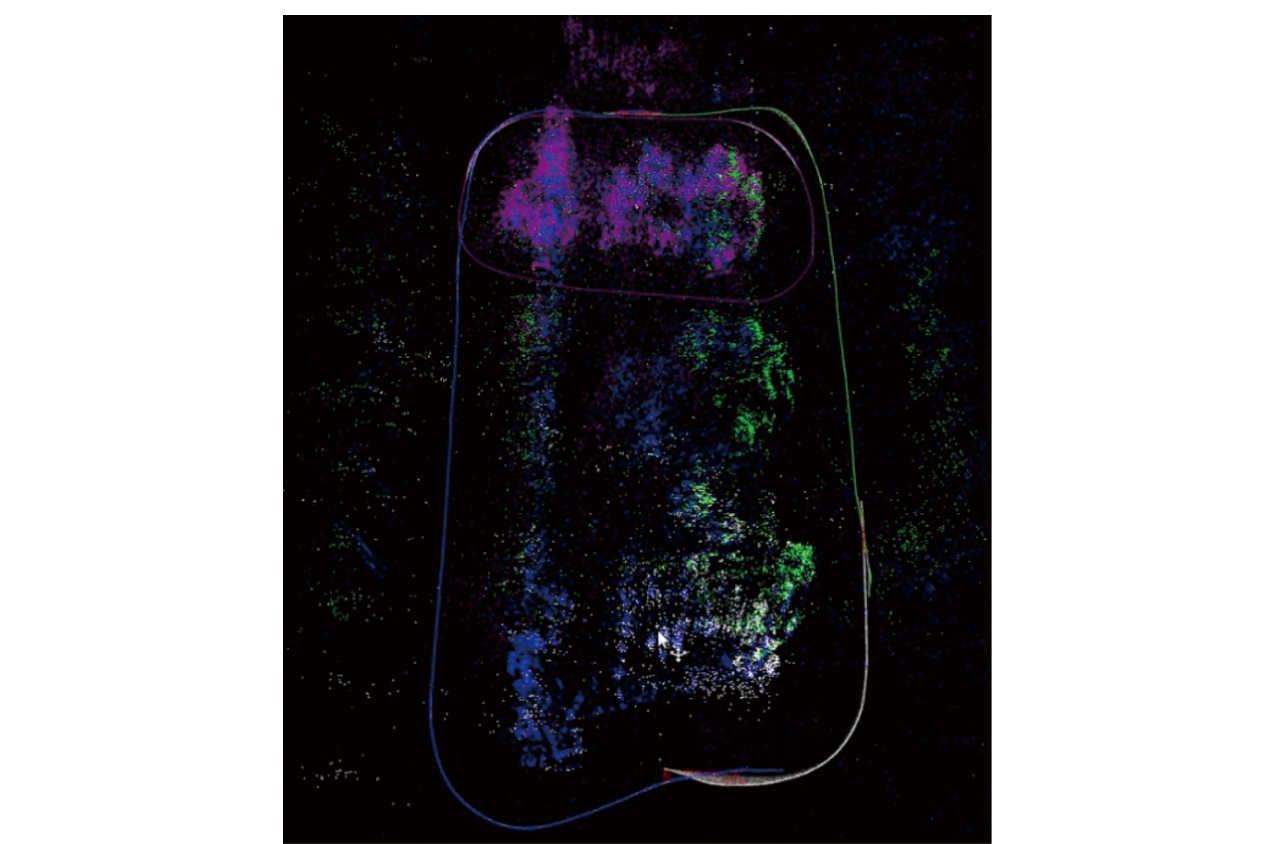
Fig.29 Trajectories and point cloud maps constructed by four unmanned vehicles in an indoor environment
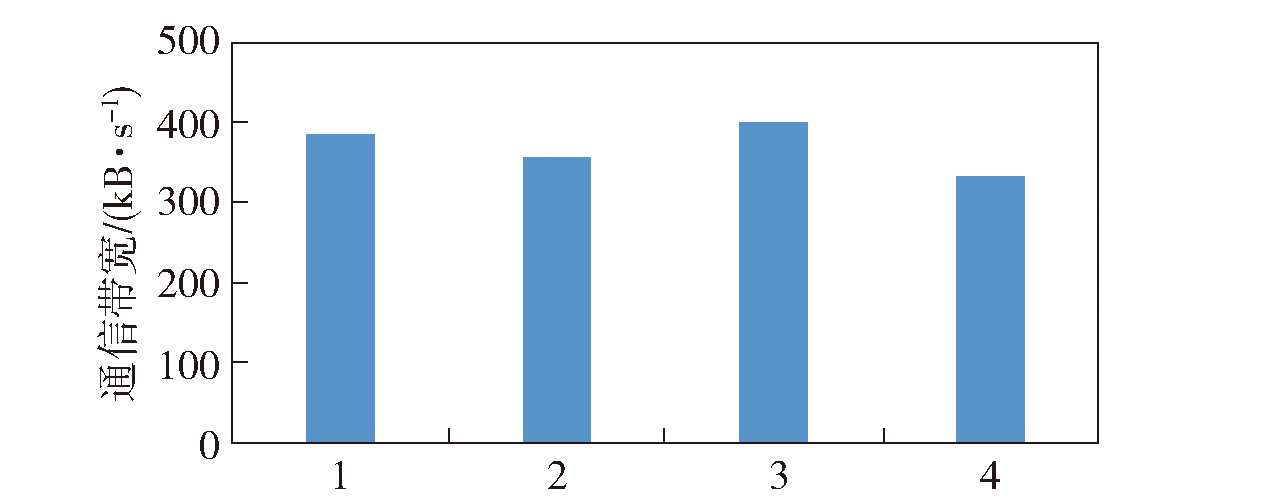
Fig.30 Communication bandwidth from the unmanned platforms to the ground station when four unmanned vehicles are running at the same time
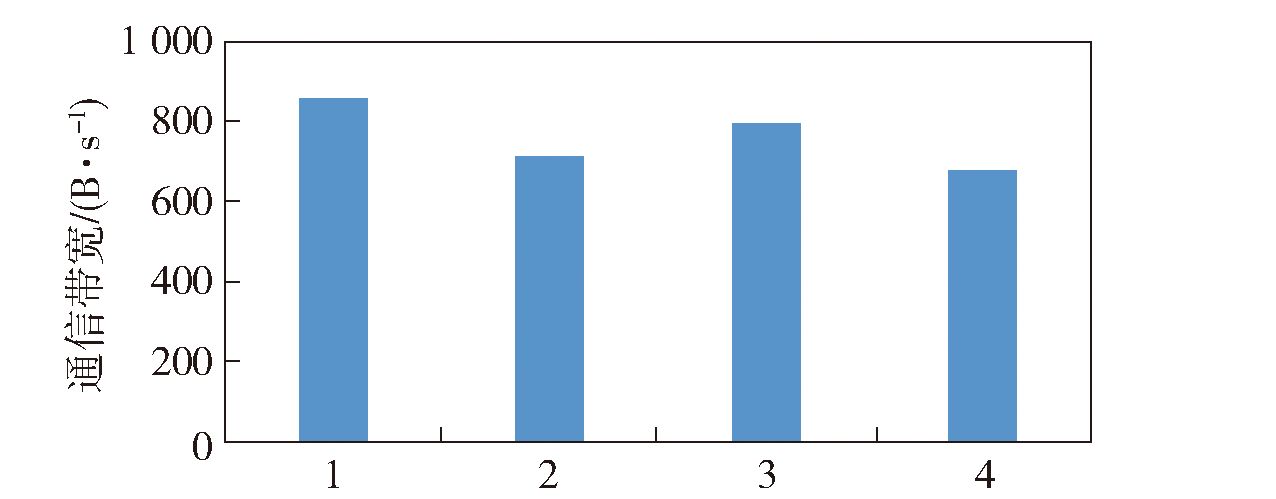
Fig.31 Communication bandwidth from the ground station to the unmanned platforms when four unmanned vehicles are running at the same time
| [1] |
刘延旭. 面向无人机集群的多源融合定位关键技术研究[D]. 北京: 北京邮电大学, 2022.
|
|
|
|
| [2] |
陈超. 无人集群任务分配方法研究[D]. 长沙: 国防科学技术大学, 2023.
|
|
|
|
| [3] |
|
| [4] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的SLAM算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
doi: 10.12382/bgxb.2022.0240 |
|
| [5] |
唐铭. 基于非线性贝叶斯滤波的SLAM算法研究[D]. 大连: 大连理工大学, 2022.
|
|
|
|
| [6] |
范迎春. 动态环境下的视觉SLAM地图构建研究[D]. 西安: 西安电子科技大学, 2021.
|
|
|
|
| [7] |
doi: 10.1109/LSP.2016. URL |
| [8] |
夏琳琳, 张晶晶, 初妍, 等. 融合天空偏振光的视觉SLAM研究进展与展望[J/OL]. 兵工学报:1-15[2023-06-16]. http://kns.cnki.net/kcms/detail/11.2176.TJ.20220831.1417.002.html.
|
|
|
|
| [9] |
doi: 10.1109/TRO.2015.2463671 URL |
| [10] |
|
| [11] |
doi: 10.1109/TPAMI.2017.2658577 pmid: 28422651 |
| [12] |
doi: 10.1109/LRA.2018.2889156 URL |
| [13] |
doi: 10.3390/jmse8060437 URL |
| [14] |
|
| [15] |
doi: 10.1109/TPAMI.2012.104 URL |
| [16] |
doi: 10.1016/j.robot.2013.11.007 URL |
| [17] |
|
| [18] |
doi: 10.1002/rob.2019.36.issue-4 URL |
| [19] |
|
| [20] |
doi: 10.1109/LSP.2016. URL |
| [21] |
doi: 10.1109/TRO.2022.3182503 URL |
| [1] | ZHAO Xiaoqiang, CHENG Wei. Lightweight Image Super-resolution Reconstruction Based on Cross-fusion of Spatial Features [J]. Acta Armamentarii, 2024, 45(4): 1273-1284. |
| [2] | XUE Jianqiang, SHI Yanjun, LI Bo. A Review of Edge Computing Technology for Unmanned Swarms [J]. Acta Armamentarii, 2023, 44(9): 2546-2555. |
| [3] | YUAN Mingzheng, PAN Teng, BIAN Xiaobing, YANG Lei, ZHOU Hongyuan, HUANG Guangyan, ZHANG Hong. Response Characteristics of Curved Fiber Composite Protective Shelter under the action of Explosive Shock Wave [J]. Acta Armamentarii, 2023, 44(12): 3909-3920. |
| [4] | LI Zuoxuan, JIA Liangyue, HAO Jia, WANG Chao, WANG Guoxin, MING Zhenjun, YAN Yan. Lightweight Optimization Design of Unmanned Vehicle Body Structure Based on Multi-working Conditions Correlation [J]. Acta Armamentarii, 2023, 44(11): 3529-3542. |
| [5] | CUI Lingfei, GUO Yonghong, XIU Quanfa, SHI Chao, ZHANG Shuoyang. UAV Detection Method Based on Domestic Embedded Intelligent Computing Platform [J]. Acta Armamentarii, 2022, 43(S1): 146-154. |
| [6] | YAN Jiwei, SU Juan, LI Yihong. Building Detection Algorithm in SAR Images Based on Ghost Convolution and Attention Mechanisms [J]. Acta Armamentarii, 2022, 43(7): 1667-1675. |
| [7] | MA Yuehong, KONG Mengyao. A Lightweight Target Detection Algorithm Based on the Improved Faster-RCNN [J]. Acta Armamentarii, 2021, 42(12): 2664-2674. |
| [8] | ZOU Tiangang, YAN Qingdong, GAI Jiangtao, HOU Wei, WANG Zhitao, SHUAI Zhibin, SUN Xueyan. The Scheme of Lightweight Integrated Mixing Transmission Based on Flat Motor for Tracked Vehicle [J]. Acta Armamentarii, 2021, 42(10): 2233-2241. |
| [9] | LIANG Jie, REN Jun, LI Lei, QI Hang, ZHOU Hongli. Airport Runway Detection Agorithm Based on Accurate Regression of Typical Geometric Shapes [J]. Acta Armamentarii, 2020, 41(10): 2045-2054. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||