
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3253-3258.doi: 10.12382/bgxb.2022.0819
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
ZHANG Yuanbo1,2, XIANG Changle1, WANG Weida1,*( ), CHEN Yongdan3
), CHEN Yongdan3
Received:2022-09-13
Online:2023-07-02
Contact:
WANG Weida
CLC Number:
ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle[J]. Acta Armamentarii, 2023, 44(11): 3253-3258.
Add to citation manager EndNote|Ris|BibTeX
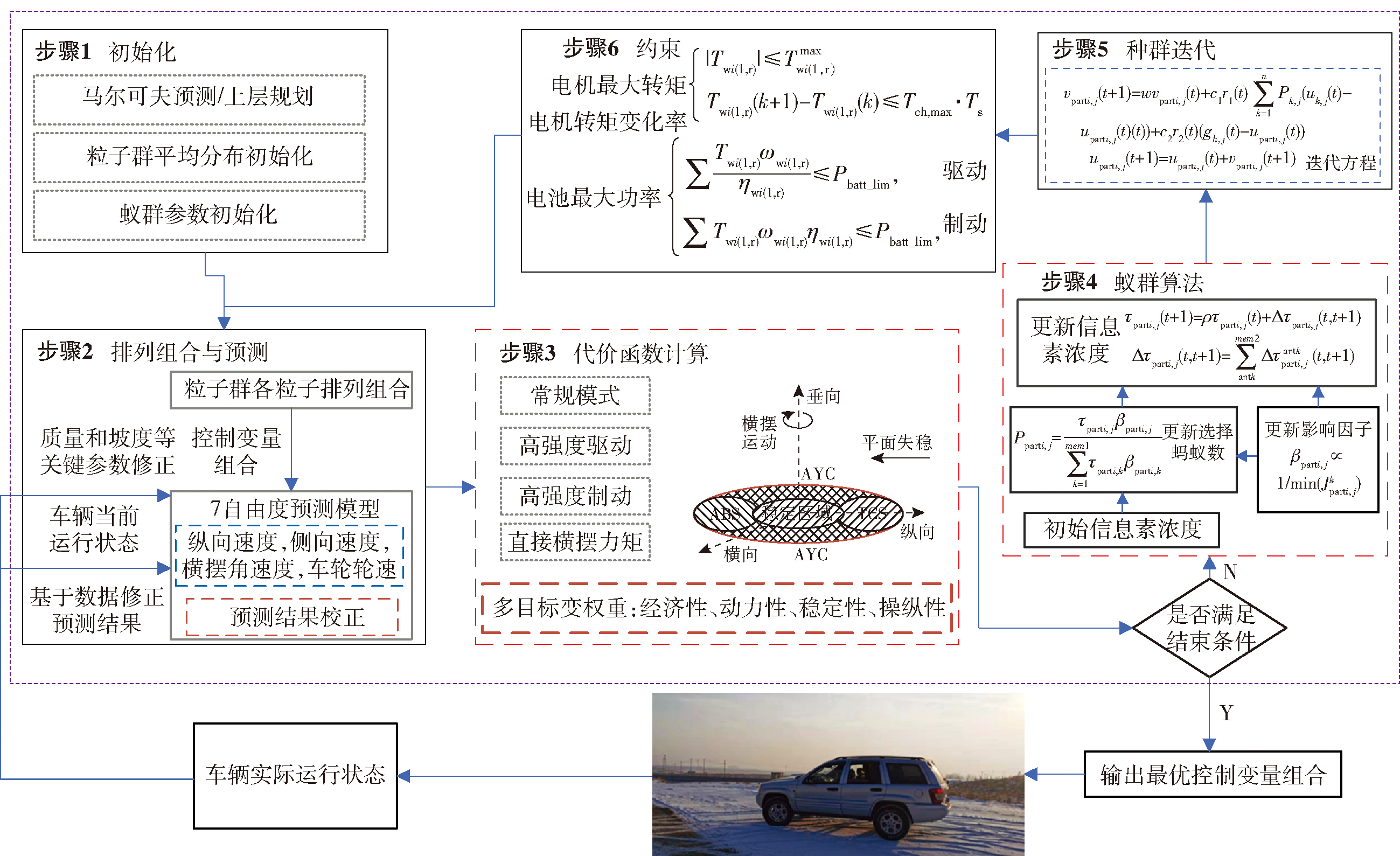
Fig.1 Model predictive torque coordination control strategy of distributed electric drive vehicle based on particle swarm optimization-ant colony optimization algorithm
| 试验设备 | 相关参数 |
|---|---|
| 车辆 | 迎风面积3m2,质量约2300kg |
| 电池组 | 磷酸铁锂电池组,电压340V,容量60A·h |
| 驱动电机 | 永磁同步电机,额定功率30kW,峰值功率70kW,额定转速3000r/min,峰值转速6000r/min,额定转矩100N·m,峰值转矩210N·m |
| 减速器 | 传动比3.4 |
| 轮胎 | 半径0.35m |
| 综合控制器 | RaPIDECU S1,芯片型号MPC5674F,32位,主频160MHz,CAN通道数4 |
Table 1 Key parameters of distributed drive electric vehicle
| 试验设备 | 相关参数 |
|---|---|
| 车辆 | 迎风面积3m2,质量约2300kg |
| 电池组 | 磷酸铁锂电池组,电压340V,容量60A·h |
| 驱动电机 | 永磁同步电机,额定功率30kW,峰值功率70kW,额定转速3000r/min,峰值转速6000r/min,额定转矩100N·m,峰值转矩210N·m |
| 减速器 | 传动比3.4 |
| 轮胎 | 半径0.35m |
| 综合控制器 | RaPIDECU S1,芯片型号MPC5674F,32位,主频160MHz,CAN通道数4 |
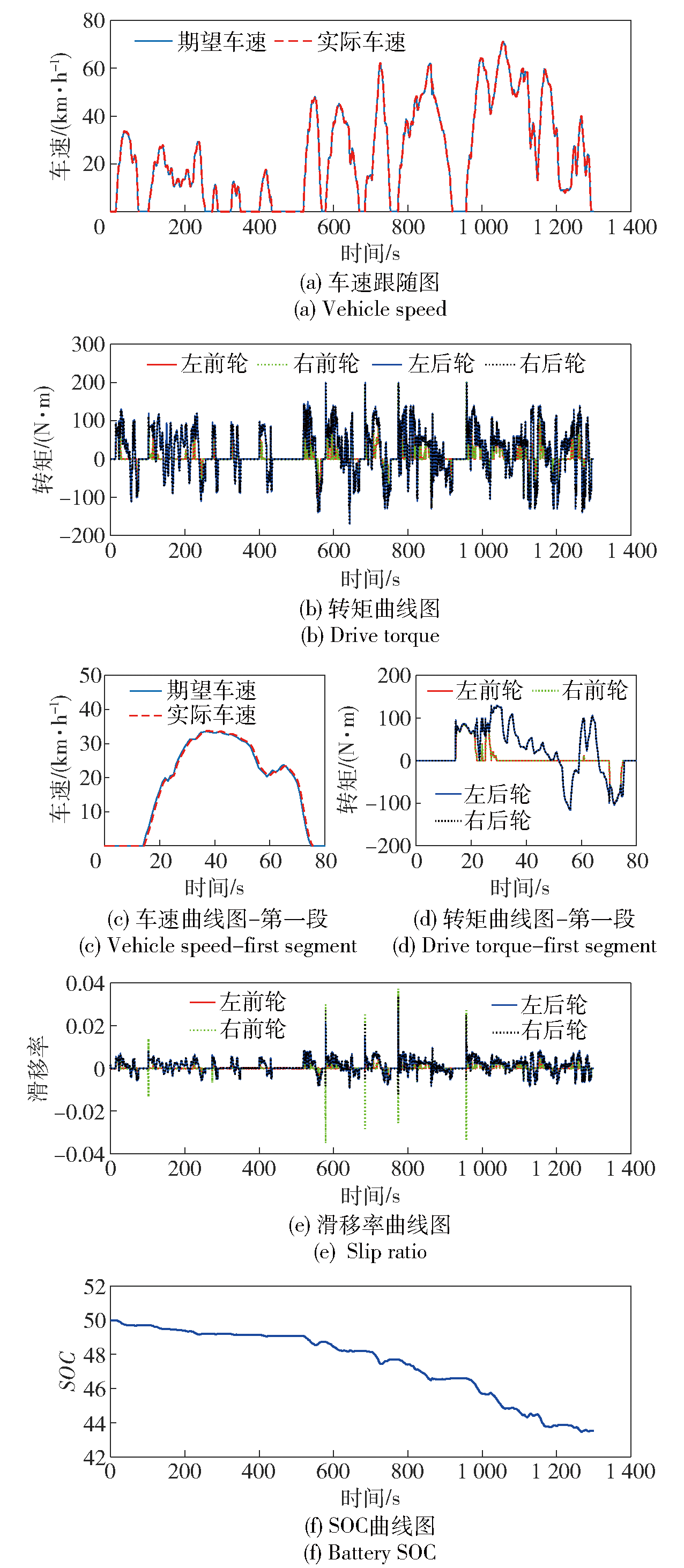
Fig.2 Model predictive torque coordination control strategy-Chinese automobile driving cycle
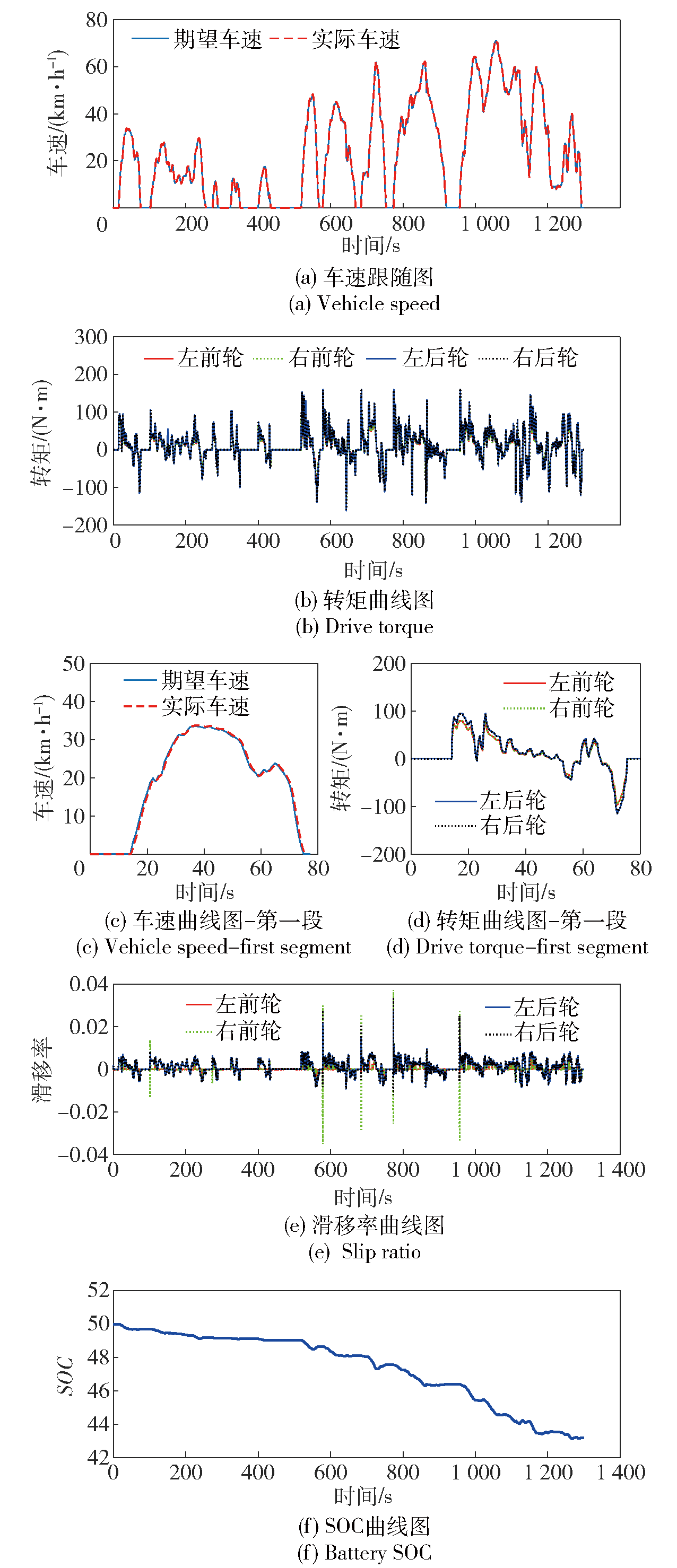
Fig.3 Rule-based control strategy-Chinese automobile driving cycle
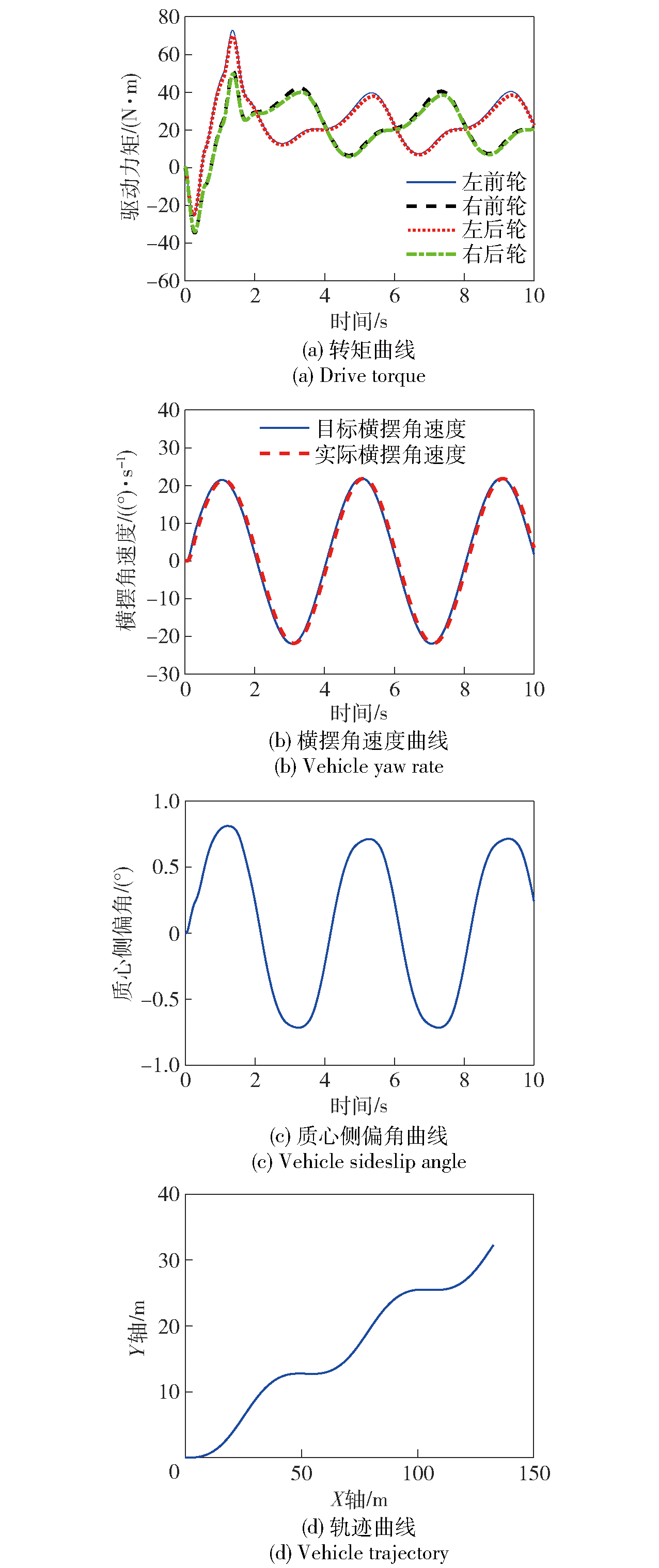
Fig.4 Model predictive torque coordination control strategy-sinusoidal steering condition
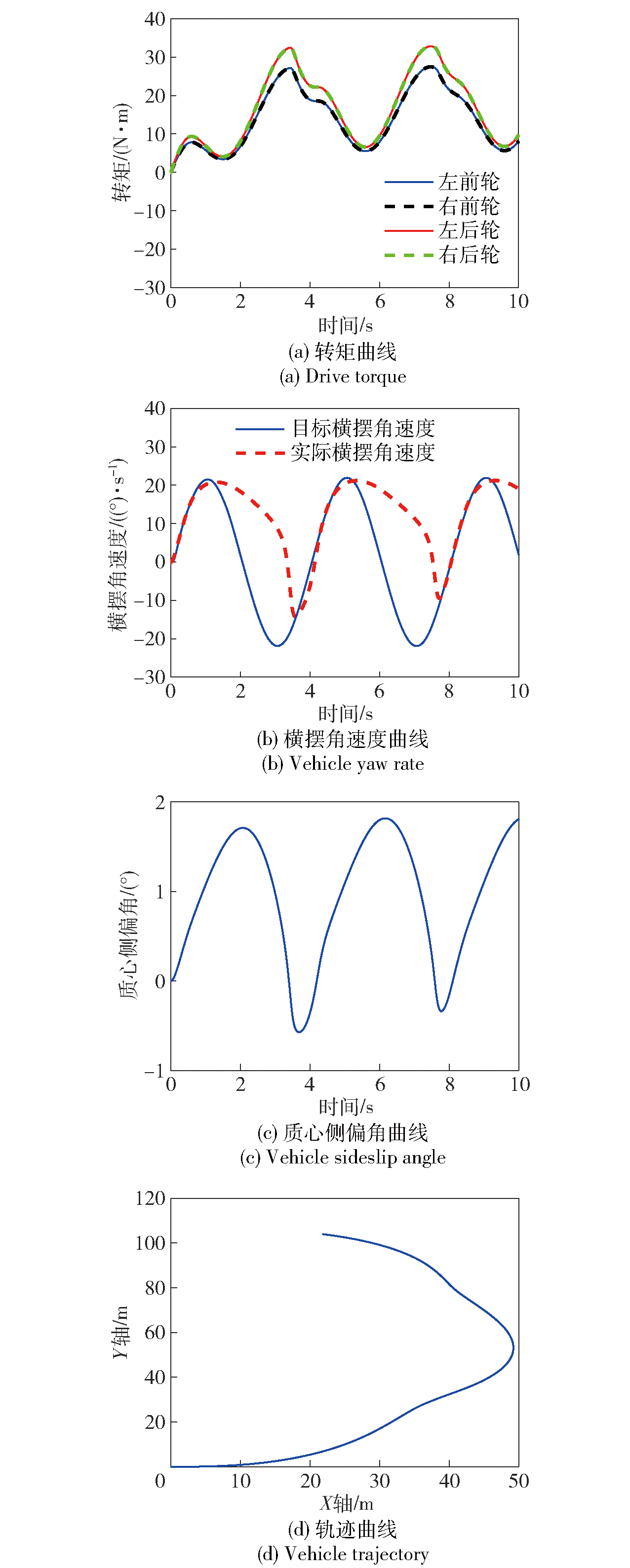
Fig.5 No direct yaw torque control strategy-sinusoidal steering condition
Fig.6 Chessboard adhesion coefficient cycle
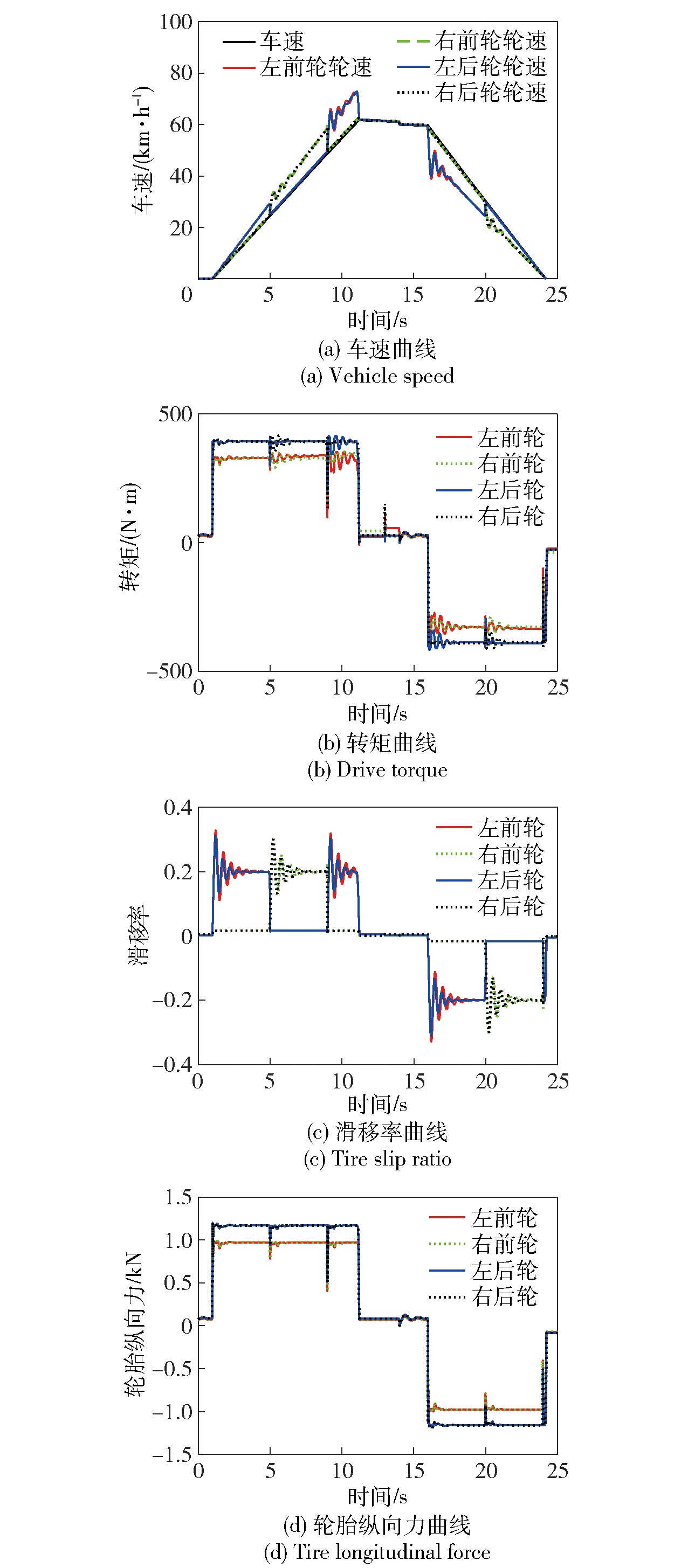
Fig.7 Model predictive torque coordinaion control strategy-chessboard adhesion coefficient cycle

Fig.8 PID control strategy-chessboard adhesion coefficient cycle

Fig.9 Test vehicle
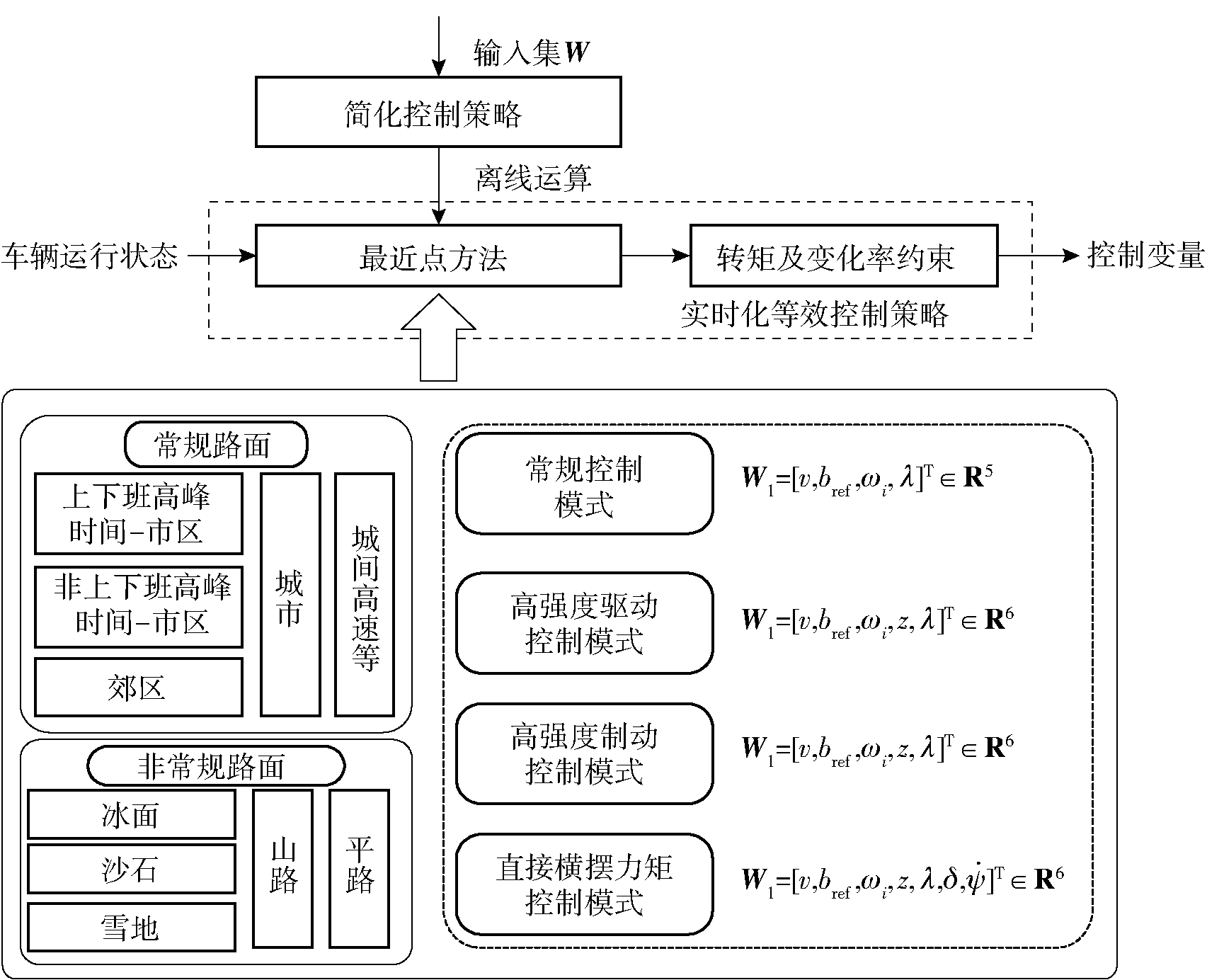
Fig.10 Equivalent control strategy

Fig.11 Real vehicle test-Chinese automobile driving cycle
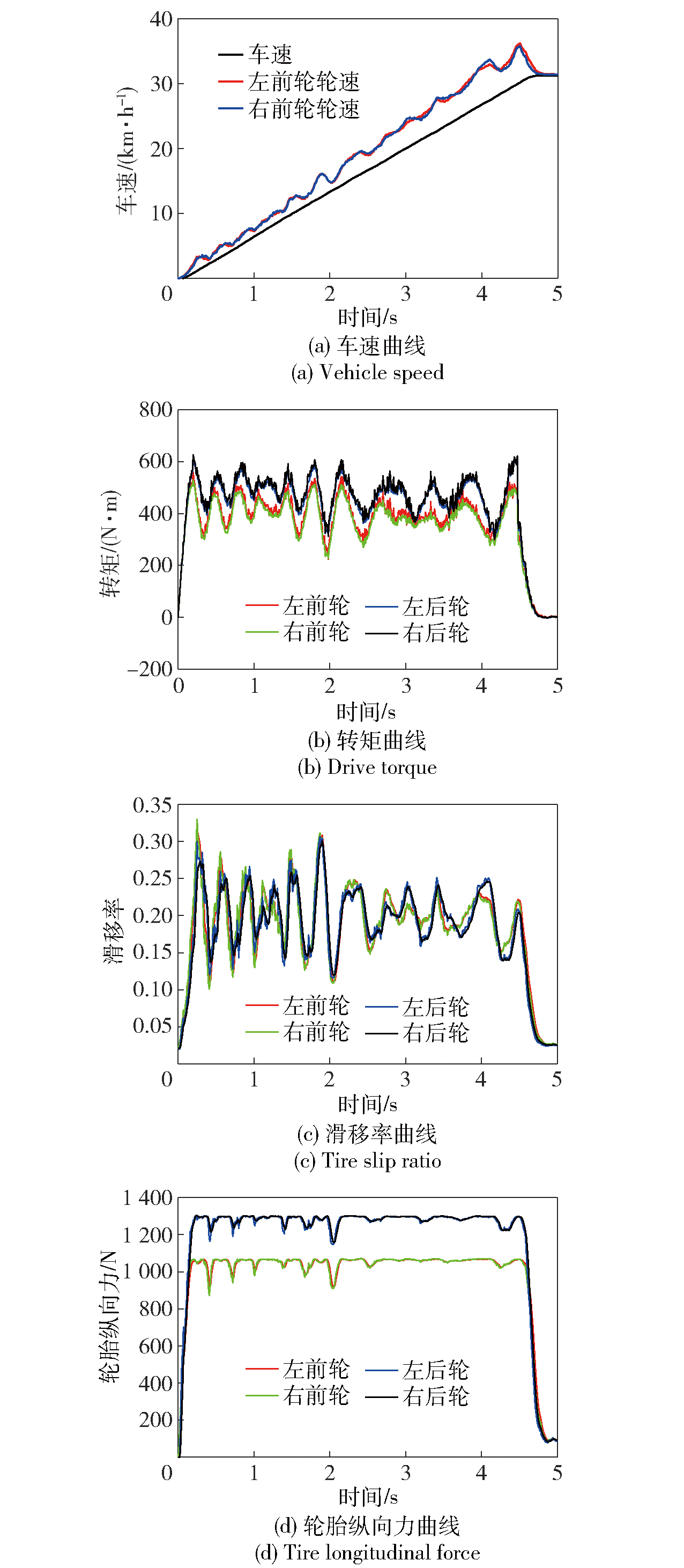
Fig.12 Real vehicle test-acceleration condition
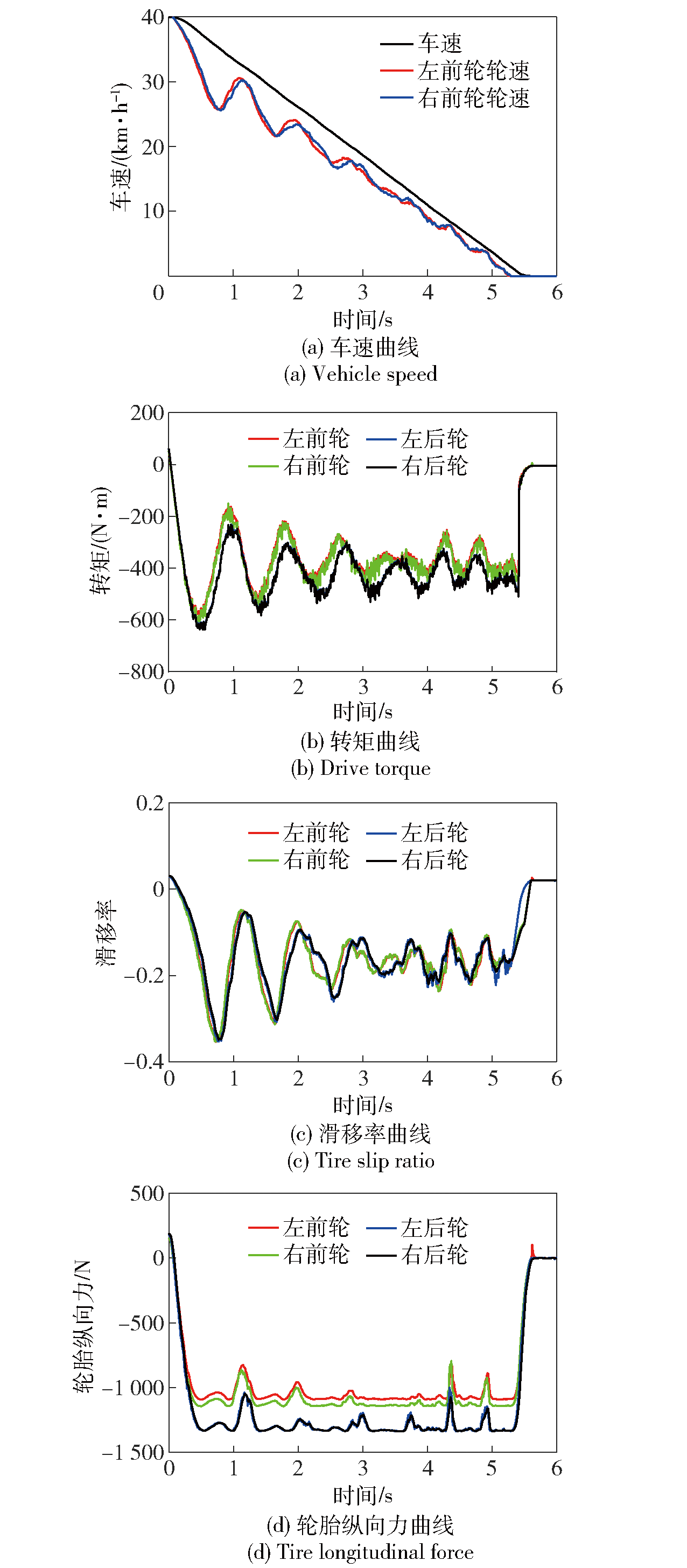
Fig.13 Real vehicle test-braking condition
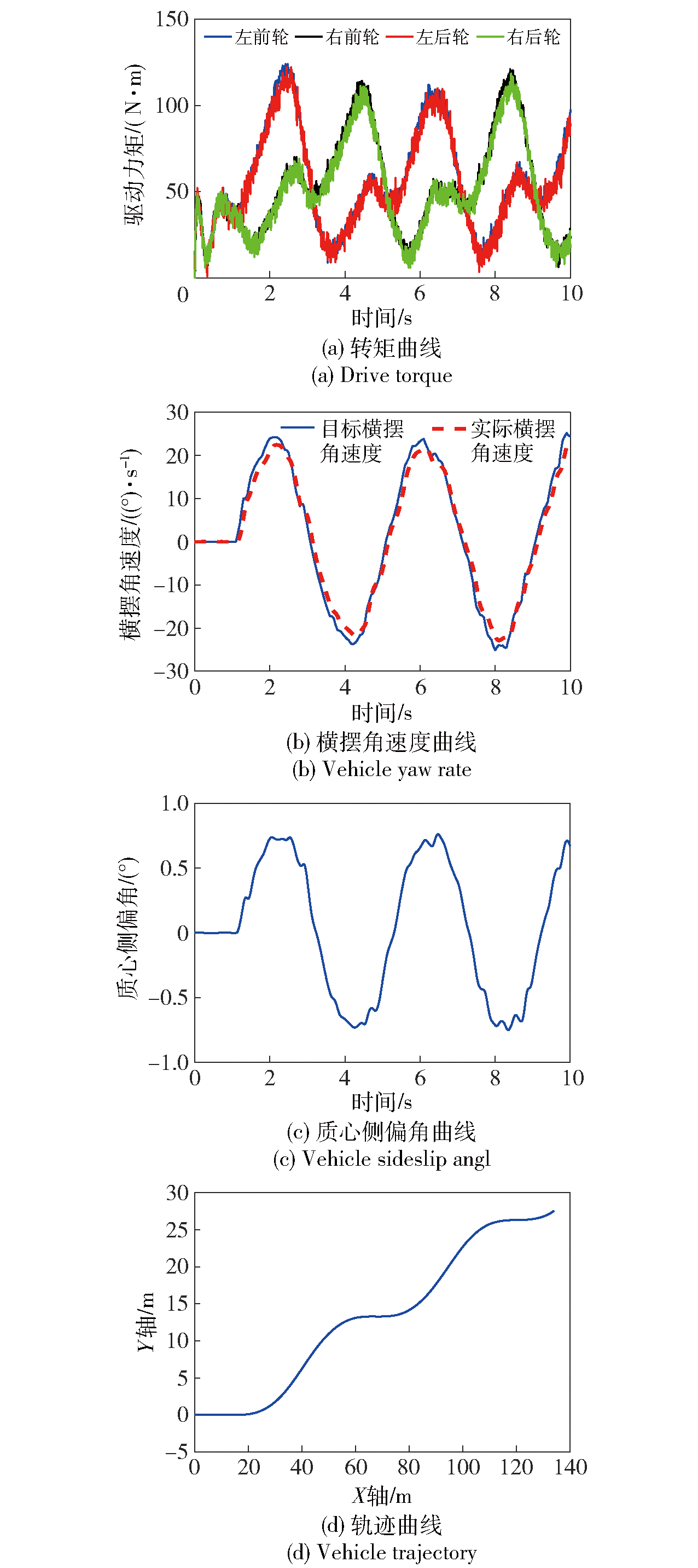
Fig.14 Real vehicle test-sinusoidal steering condition
| [1] |
张渊博, 王伟达, 张华, 等. 基于新型改进遗传算法的混合动力客车高效制动能量回收预测控制策略研究[J]. 机械工程学报, 2020, 56(18):105-115.
doi: 10.3901/JME.2020.18.105 |
|
doi: 10.3901/JME.2020.18.105 |
|
| [2] |
doi: 10.1080/00423114.2015.1028414 URL |
| [3] |
doi: 10.3901/CJME.2015.0318.033 URL |
| [4] |
马可. 四轮驱动电动车纵向动力学控制[D]. 北京: 清华大学, 2011.
|
|
|
|
| [5] |
|
| [6] |
朱元, 武四辈, 吴志红, 等. 电动汽车用内置式永磁同步电动机精确转矩控制方法[J]. 农业机械学报, 2014, 45(1):8-13.
|
|
|
|
| [7] |
doi: 10.1080/00423114.2012.666357 URL |
| [8] |
|
| [9] |
|
| [10] |
doi: 10.4271/2015-01-2846 URL |
| [11] |
doi: 10.6113/JPE.2015.15.5.1244 URL |
| [12] |
|
| [13] |
doi: 10.1007/s12239-015-0096-0 URL |
| [14] |
doi: 10.1177/0954407014564780 URL |
| [15] |
doi: 10.1002/asjc.v18.1 URL |
| [16] |
doi: 10.1002/asjc.v18.1 URL |
| [17] |
doi: 10.1049/cth2.v9.18 URL |
| [18] |
doi: 10.1080/00423114.2015.1012212 URL |
| [19] |
高晓杰, 余卓平, 张立军. 集成底盘控制系统的控制构架研究[J]. 汽车工程, 2007, 29(1):21-25.
|
|
|
|
| [20] |
朱冰, 李幼德, 赵健, 等. 基于多变量频域控制方法的车辆底盘集成控制[J]. 农业机械学报, 2010, 41 (1): 14-18.
|
|
|
|
| [21] |
牛礼民, 陈龙, 赵又群, 等. 车辆底盘集成控制系统的电动机控制[J]. 农业机械学报, 2008, 39(12):27-30, 44.
|
|
|
|
| [22] |
刘聪, 刘辉, 韩立金, 等. 分布式电驱动车辆极限越野环境下高速避障与稳定性控制[J]. 兵工学报, 2021, 42(10):2102-2113.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.006 |
|
| [23] |
蔡立春, 廖自力, 李嘉麒, 等. 8×8分布式电驱动装甲车辆稳定性直接横摆力矩与转矩矢量控制[J]. 兵工学报, 2021, 42(10):2196-2205.
doi: 10.3969/j.issn.1000-1093.2021.10.015 |
|
doi: 10.3969/j.issn.1000-1093.2021.10.015 |
|
| [24] |
doi: 10.1080/00423114.2020.1845387 URL |
| [25] |
doi: 10.1016/j.automatica.2008.06.015 URL |
| [26] |
doi: 10.1016/j.conengprac.2010.03.002 URL |
| [27] |
|
| [1] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [2] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [3] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [4] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [5] | WANG Lei, XU Chao, LI Miao, ZHAO Huiwu. Improved Particle Swarm Optimization Algorithm for Cooperative Task Assignment of Multiple vehicles [J]. Acta Armamentarii, 2023, 44(8): 2224-2232. |
| [6] | FAN Boyang, ZHAO Gaopeng, BO Yuming, WU Xiang. Collaborative Task Allocation Method for Multi-Target Air-Ground Heterogeneous Unmanned System [J]. Acta Armamentarii, 2023, 44(6): 1564-1575. |
| [7] | CHEN Meishan, LIU Ying, ZENG Weigui, QIAN Kun. Dynamic Jamming Resource Allocation Strategy of MALD [J]. Acta Armamentarii, 2023, 44(5): 1443-1455. |
| [8] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [9] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [10] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [11] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [12] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [13] | SHUAI Yong, SONG Tai-liang, WANG Jian-ping, SHEN Hong. An Improved Parallel Prediction Model of Equipment Support Capability [J]. Acta Armamentarii, 2016, 37(6): 1089-1095. |
| [14] | ZHANG Yong-qiang, XU Zong-chang, SUN Han-bing, HU Chun-yang. Optimization of Carried Spare Parts Based on Monte Carlo Simulation and Parallel Particle Swarm Optimization Algorithm [J]. Acta Armamentarii, 2016, 37(1): 122-130. |
| [15] | ZHU Xia, CHEN Ren-wen, XIA Hua-kang, ZHANG Piao-yan. A Novel Image Registration Based on Cultural Particle Swarm Optimization Algorithm [J]. Acta Armamentarii, 2015, 36(6): 1033-1039. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||