
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2497-2519.doi: 10.12382/bgxb.2023.0637
Previous Articles Next Articles
LIU Yali1,2, LU Yanchi1, XU Xiaolong1, SONG Qiuzhi1,2,*( )
)
Received:2023-07-08
Online:2023-12-21
Contact:
SONG Qiuzhi
CLC Number:
LIU Yali, LU Yanchi, XU Xiaolong, SONG Qiuzhi. A Review of the Evaluation Methods of Assisting Effectiveness of Exoskeleton Robot and Its Applications[J]. Acta Armamentarii, 2024, 45(8): 2497-2519.
Add to citation manager EndNote|Ris|BibTeX
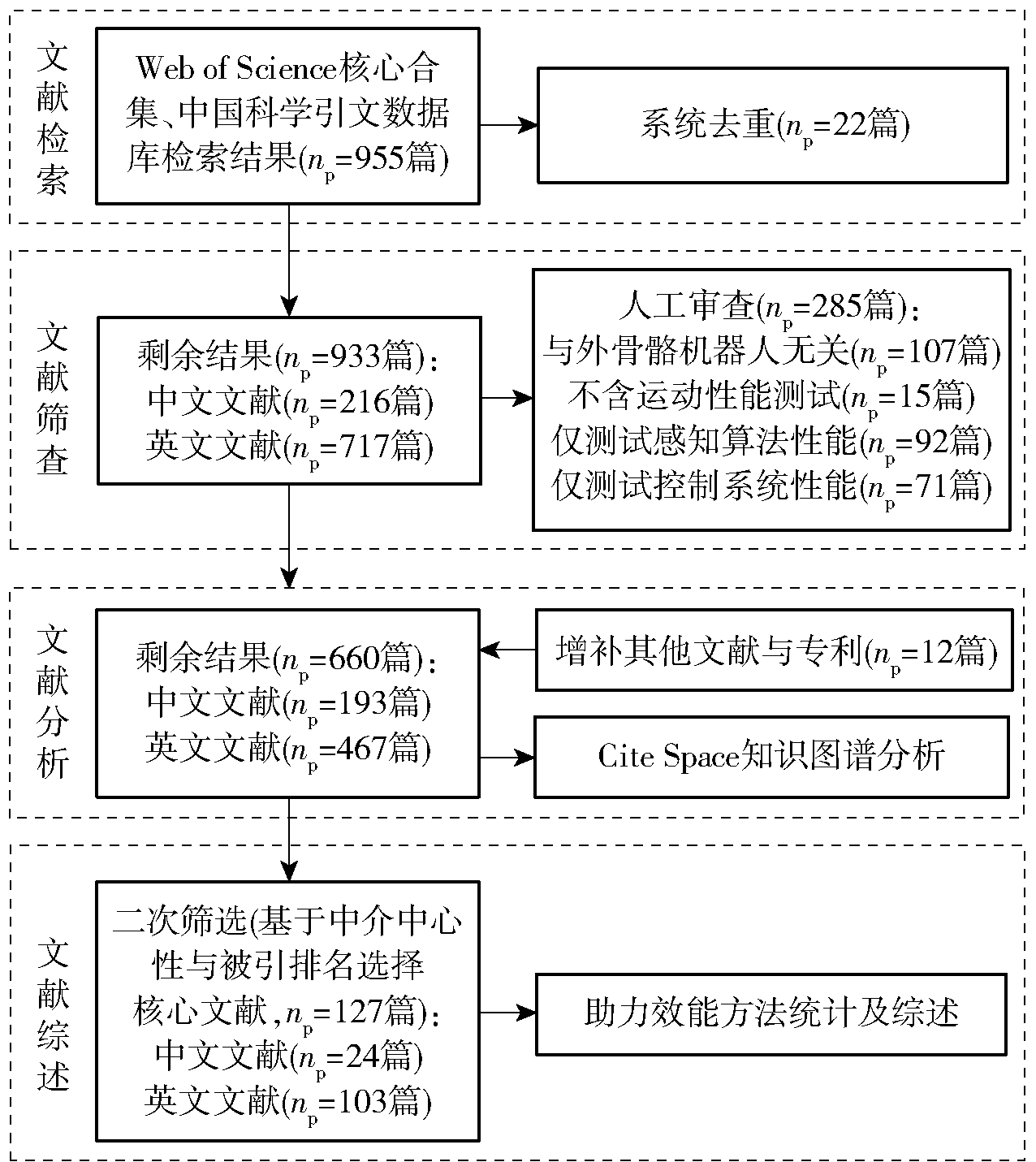
Fig.1 Document search and screening flowchart
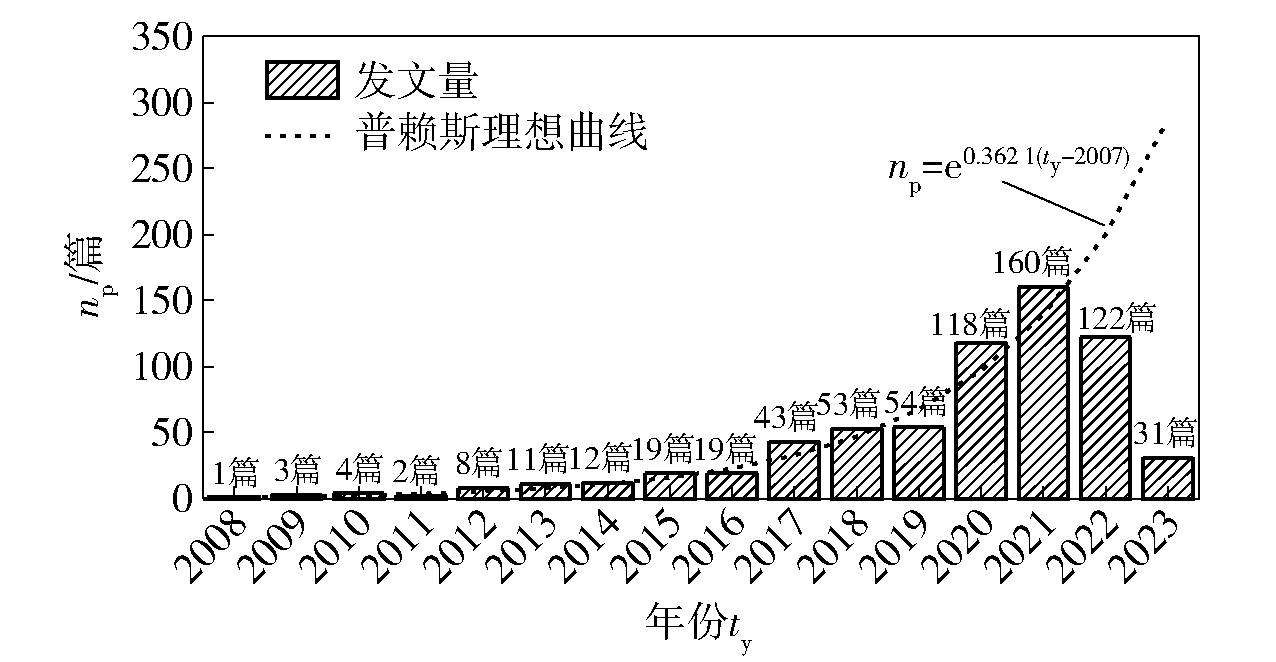
Fig.2 Article volume statistics in the field of exoskeleton research and assisting effectiveness evaluation

Fig.3 Mapping of countries/research institutes cooperation networks
| 序号 | 发文量/篇 | 中介中心性 | 国家/机构 |
|---|---|---|---|
| 1 | 232 | 0.84 | USA(美国) |
| 2 | 193 | 0.56 | China(中国) |
| 3 | 81 | 0.33 | Italy(意大利) |
| 4 | 59 | 0.26 | South Korea(韩国) |
| 5 | 41 | 0.17 | Japan(日本) |
| 6 | 36 | 0.15 | Spain(西班牙) |
| 7 | 35 | 0.05 | Switzerland(瑞士) |
| 8 | 30 | 0.14 | Germany(德国) |
| 9 | 23 | 0.15 | Canada(加拿大) |
| 10 | 21 | 0.02 | Scuola Superiore Sant'anna (圣安娜高等学院) |
Table 1 Article volume and intermediary centrality of countries/research institutions (Top 10)
| 序号 | 发文量/篇 | 中介中心性 | 国家/机构 |
|---|---|---|---|
| 1 | 232 | 0.84 | USA(美国) |
| 2 | 193 | 0.56 | China(中国) |
| 3 | 81 | 0.33 | Italy(意大利) |
| 4 | 59 | 0.26 | South Korea(韩国) |
| 5 | 41 | 0.17 | Japan(日本) |
| 6 | 36 | 0.15 | Spain(西班牙) |
| 7 | 35 | 0.05 | Switzerland(瑞士) |
| 8 | 30 | 0.14 | Germany(德国) |
| 9 | 23 | 0.15 | Canada(加拿大) |
| 10 | 21 | 0.02 | Scuola Superiore Sant'anna (圣安娜高等学院) |
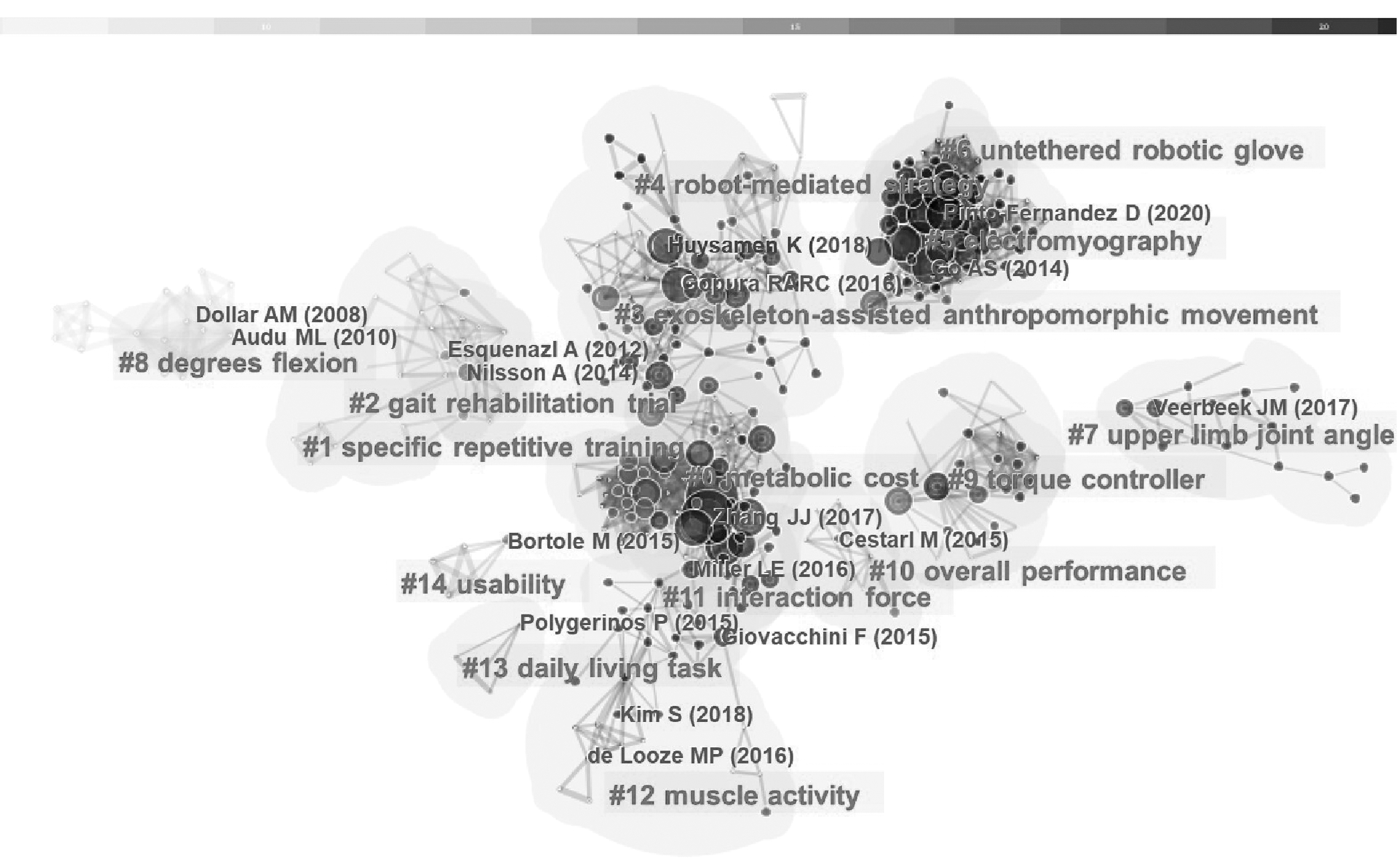
Fig.4 Co-citation network mapping in the field of exoskeleton assisting effectiveness research
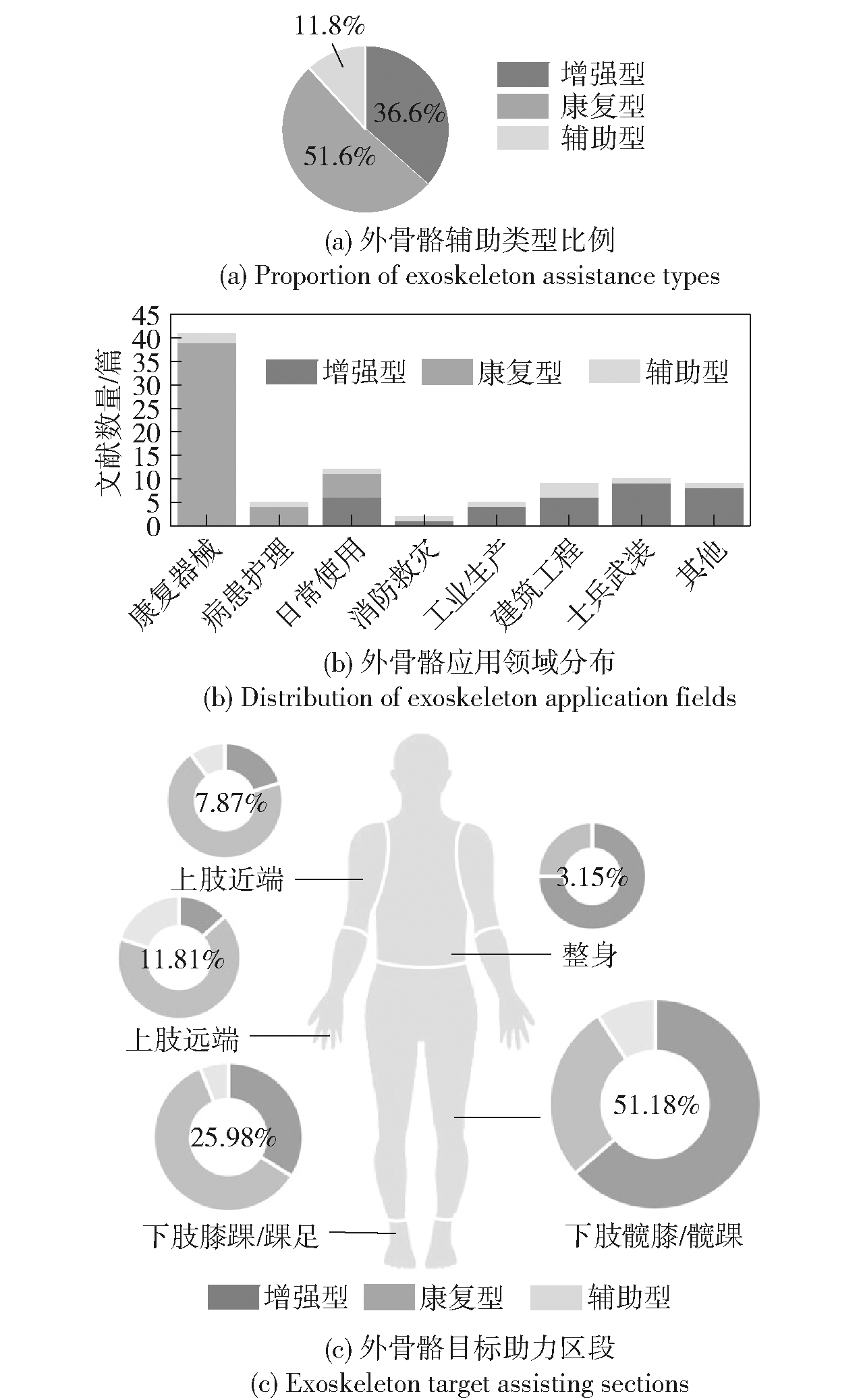
Fig.5 Exoskeleton robot application research
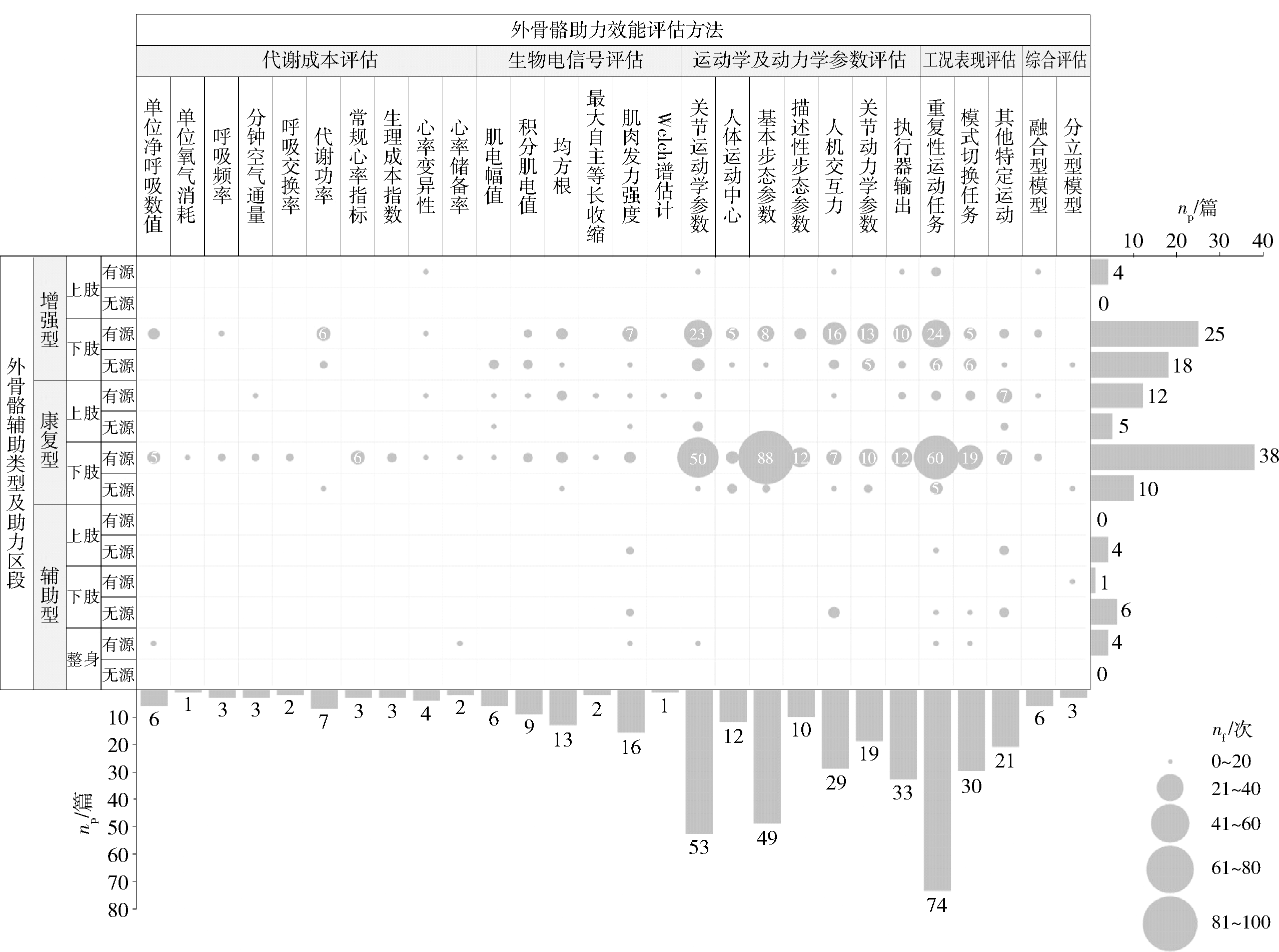
Fig.6 Statistics of exoskeleton robot assisting effectiveness evaluation methods
| 类型 | 原理 | |
|---|---|---|
| 单位净呼吸数 值[ | 分别在穿戴外骨骼前后测量运动前静息、运动中与运动后静息稳定段的呼吸数值V(代指耗氧量 或二氧化碳排放量 )并截取t(t为2~10min)数据,利用V=(VMOVE+VAFTER-2VPRE)/m或V=(VMOVE-VPRE)/m计算单位净呼吸数值变化,式中VPRE、VMOVE、VAFTER分别表示运动前、运动中与运动后t稳定段的平均呼吸数值(mL/min),m表示受试者体重(kg)。通过计算受试者穿戴外骨骼前、后的单位净呼吸数值VNONE、VEXO,获得单位呼吸数值变化率V%=(VEXO-VNONE)/VNONE×100%。 | |
| 呼吸 数值 | 单位氧气消耗(Oxygen Cost, OC)[ | 指未穿戴、穿戴外骨骼时单位净耗氧量 与平均步行速度v的比值,即OCNONE= / 和OCEXO= / 。通过计算受试者穿戴外骨骼前后的单位OC(OCNONE、OCEXO),获得单位OC变化率OC%=(OCEXO-OCNONE)/OCNONE×100%。 |
| 呼吸频率(Respiratory Rate, RR)[ | 指每分钟呼吸的次数,即1min内胸部起伏的次数,可通过密切观察被检者的胸部起伏状态或利用生理监测设备获得,通常关注RR的中位数,以避免平均数带来的异常值影响。 | |
| 分钟空气通量(Minute Ventilation, MV)[ | 指每分钟吸入或呼出肺的气体总量,是潮气量(Tidal Volume, TV)[ | |
| 呼吸交换率(Respiratory Exchange Ratio, RER)[ | 指每分钟人体二氧化碳排放量与耗氧量之比值,当RER<1时,受试者处于有氧呼吸状态;当RER≥1时,受试者处于有氧与无氧共同作用的呼吸状态。RER的增加一定程度上反映了运动强度的增大与身体供能系统呼吸底物的变化。 | |
| 代谢 功率 | 基于标准方程的单位代谢功 率[ | 基于净呼吸数值,使用Brockway标准方程[ |
| 基于呼吸熵(Respiratory Quotient,RQ)的 单位代谢功率[ | RQ指每分钟细胞二氧化碳排出量与耗氧量之比值,基于RQ的单位代谢功率计算方法与基于呼吸数值的代谢功率类似,只是改为使用H=69.7 ×(1.2341RQ+3.8124)[ | |
| 常规心率指标[ | 指心率平均值(beats/min)、心率峰值(beats/min)等。 | |
| 生理成本指数(Physiological Cost Index, PCI)[ | 指运动前静息和运动中最后t(t为2~10min)的平均心率HRPRE、HRMOVE之差与运动总时长T内的平均速度vMOVE(m/min)的比值,即PCI=(HRMOVE-HRPRE)/vMOVE。 | |
| 心率 | 心率变异性(Heart Rate Variability, HRV)[ | 表征测量心率变化的不规律性,其降低与精神疲劳、心理压力的增加存在一定相关性。通常测量心电图R波时间间隔,使用时域、频域与非线性分析指标描述。以常用时域特征平均正态区间标准差(Standard Deviation of Normal-to-Normal Intervals, SDNN)为例,其定义为一定时间窗口内已移除伪影的心率间隔的标准差,通过计算运动中SDNNMOVE与运动前静息SDNNPRE,获得SDNN变化率SDNN%=(SDNNMOVE-SDNNPRE)/SDNNPRE×100%。 |
| 心率储备率(Kaevonen Method, KM)[ | 美国运动医学会指出,运动强度的设定不能单纯以最大峰值心率进行表征,需考虑个体间差异性,因此使用KM(又称卡弗内方法)反映心率变化较为合理。通过测量运动中平均心率、运动前平均静息心率及运动中最大心率HRMOVE、HRPRE、HRmax ,获得心率储备KM=(HRMOVE-HRPRE)/(HRmax-HRPRE)×100%。 | |
Table 2 Metabolic cost evaluation indices
| 类型 | 原理 | |
|---|---|---|
| 单位净呼吸数 值[ | 分别在穿戴外骨骼前后测量运动前静息、运动中与运动后静息稳定段的呼吸数值V(代指耗氧量 或二氧化碳排放量 )并截取t(t为2~10min)数据,利用V=(VMOVE+VAFTER-2VPRE)/m或V=(VMOVE-VPRE)/m计算单位净呼吸数值变化,式中VPRE、VMOVE、VAFTER分别表示运动前、运动中与运动后t稳定段的平均呼吸数值(mL/min),m表示受试者体重(kg)。通过计算受试者穿戴外骨骼前、后的单位净呼吸数值VNONE、VEXO,获得单位呼吸数值变化率V%=(VEXO-VNONE)/VNONE×100%。 | |
| 呼吸 数值 | 单位氧气消耗(Oxygen Cost, OC)[ | 指未穿戴、穿戴外骨骼时单位净耗氧量 与平均步行速度v的比值,即OCNONE= / 和OCEXO= / 。通过计算受试者穿戴外骨骼前后的单位OC(OCNONE、OCEXO),获得单位OC变化率OC%=(OCEXO-OCNONE)/OCNONE×100%。 |
| 呼吸频率(Respiratory Rate, RR)[ | 指每分钟呼吸的次数,即1min内胸部起伏的次数,可通过密切观察被检者的胸部起伏状态或利用生理监测设备获得,通常关注RR的中位数,以避免平均数带来的异常值影响。 | |
| 分钟空气通量(Minute Ventilation, MV)[ | 指每分钟吸入或呼出肺的气体总量,是潮气量(Tidal Volume, TV)[ | |
| 呼吸交换率(Respiratory Exchange Ratio, RER)[ | 指每分钟人体二氧化碳排放量与耗氧量之比值,当RER<1时,受试者处于有氧呼吸状态;当RER≥1时,受试者处于有氧与无氧共同作用的呼吸状态。RER的增加一定程度上反映了运动强度的增大与身体供能系统呼吸底物的变化。 | |
| 代谢 功率 | 基于标准方程的单位代谢功 率[ | 基于净呼吸数值,使用Brockway标准方程[ |
| 基于呼吸熵(Respiratory Quotient,RQ)的 单位代谢功率[ | RQ指每分钟细胞二氧化碳排出量与耗氧量之比值,基于RQ的单位代谢功率计算方法与基于呼吸数值的代谢功率类似,只是改为使用H=69.7 ×(1.2341RQ+3.8124)[ | |
| 常规心率指标[ | 指心率平均值(beats/min)、心率峰值(beats/min)等。 | |
| 生理成本指数(Physiological Cost Index, PCI)[ | 指运动前静息和运动中最后t(t为2~10min)的平均心率HRPRE、HRMOVE之差与运动总时长T内的平均速度vMOVE(m/min)的比值,即PCI=(HRMOVE-HRPRE)/vMOVE。 | |
| 心率 | 心率变异性(Heart Rate Variability, HRV)[ | 表征测量心率变化的不规律性,其降低与精神疲劳、心理压力的增加存在一定相关性。通常测量心电图R波时间间隔,使用时域、频域与非线性分析指标描述。以常用时域特征平均正态区间标准差(Standard Deviation of Normal-to-Normal Intervals, SDNN)为例,其定义为一定时间窗口内已移除伪影的心率间隔的标准差,通过计算运动中SDNNMOVE与运动前静息SDNNPRE,获得SDNN变化率SDNN%=(SDNNMOVE-SDNNPRE)/SDNNPRE×100%。 |
| 心率储备率(Kaevonen Method, KM)[ | 美国运动医学会指出,运动强度的设定不能单纯以最大峰值心率进行表征,需考虑个体间差异性,因此使用KM(又称卡弗内方法)反映心率变化较为合理。通过测量运动中平均心率、运动前平均静息心率及运动中最大心率HRMOVE、HRPRE、HRmax ,获得心率储备KM=(HRMOVE-HRPRE)/(HRmax-HRPRE)×100%。 | |
| 类型 | 原理 | |
|---|---|---|
| 肌电幅值[ | 直接比较sEMG信号线性包络曲线的振幅,反映肌肉激活度大小、肌肉收缩强度、峰值大小及位置。 | |
| 肌电直方图[ | 由于肌肉高度收缩时sEMG信号偏离其基线,故提取不同幅值的sEMG采样个数作为信号特征。设定阈值并将正负阈值间距离等分成不同幅值段,检测各幅值段的信号个数,阈值水平和分段数可根据实验而定,反映研究肌肉收缩特征及变化规律。 | |
| iEMG值[ | 指一定时间窗口内肌肉参与活动的运动单位放电总量,由离散sEMG信号的绝对值之和取平均求得,在中等负荷范围内,iEMG伴随肌力的增加和疲劳的产生而增长,反映肌肉激活程度。iEMG值计算公式为iEMG=( |xi|)/n。 | |
| 时域 | RMS[ | 指一定时间窗口内肌电幅值平方和均值的平方根,在中等负荷范围内,iEMG伴随肌力的增加和疲劳的产生而增长,反映肌肉活动强弱。肌电RMS计算公式为RMS= ,可结合多运动周期RMS的峰值或标准差进行助力效能评估。 |
| 最大自主等长收缩(Maximal Voluntary Isometric Contraction, MVIC)[ | 指受试者进行抗阻运动时认为输出最高努力水平的肌电值,一般由RMS平滑滤波后取最值获得,通过比较进行最大自主收缩时目标肌肉原始肌电信号的变化,反映肌肉爆发力及疲劳情况。 | |
| 肌肉发力强度(Percentage of Maximal Voluntary Isometric Contraction, MVIC%)[ | 指一定时间窗口内归一化的肌电RMS,通常使用最大自主收缩肌电值(或多周期肌电RMS均值)作为归一化分母,反映肌肉产能情况。肌肉发力强度计算公式为MVIC%=RMS/MVIC×100%。可通过交叉相关分析,确定不同条件下sEMG信号在时域曲线形状上的相似性,相关系数计算方法为$R=\left(\sum M V I C \%_{i}^{\mathrm{EXO}} \cdot M V I C \%_{i}^{\mathrm{NONE}}\right) /\left[\left(\sum M^{2} I C \%_{i}^{\text {EXO }}\right)^{1 / 2}\left(\sum M V I C \%_{i}^{\text {NONE }}\right)^{1 / 2}\right], M V I C \%_{i}^{\text {EXO }} 、 M V I C \%_{i}^{\mathrm{NONE}}$分别为穿戴、未穿戴外骨骼时长度为n的时间窗口内第i个MVIC%数值。 | |
| Welch谱估计方法[ | 指一种用于估计随机信号PSD的改进平均周期图法,可通过每个频率成分处的功率谱值占总功率的百分比形式,表示外骨骼助力前后肌电信号的功率幅度变化。 | |
| 中位频率(Median Frequency, MF)[ | 指肌肉收缩放电频率的中值,在静态收缩中,MF伴随运动时长增加而递减、伴随肌力的增加而增长,且受骨骼肌快慢肌纤维组成比例的影响,快肌纤维兴奋表现为高频放电,慢肌纤维则在低频,具有抗噪声干扰性强、适应负荷范围较广的特点。MF率计算公式为MF=0.5 PSD(f)df。 | |
| 频域 | 平均功率频率(Mean Power Frequency, MPF)[ | 指肌肉收缩放电频率的平均值,在静态收缩中,MPF伴随疲劳的产生而降低,且对于低负荷条件下的频谱变化高度敏感。MPF计算公式为 fPSDMPF fPSD=(f)df/ fPSD(f)df。 |
| FI指数[ | 指通过对比不同频率能量的比例,评估肌电功率谱的偏移情况,FI指数伴随疲劳的产生而增加,理论上可取得比MPF和MF更高的灵敏度。FI指数计算公式为 fFI f=-1PSD(f)df/ PSD(f)df,分子部分强调疲劳过程中功率谱低频成分的增多,分母部分强调功率谱高频成分的减少。 | |
Table 3 Bioelectrical signal assessment indices and muscle fatigue characteristics
| 类型 | 原理 | |
|---|---|---|
| 肌电幅值[ | 直接比较sEMG信号线性包络曲线的振幅,反映肌肉激活度大小、肌肉收缩强度、峰值大小及位置。 | |
| 肌电直方图[ | 由于肌肉高度收缩时sEMG信号偏离其基线,故提取不同幅值的sEMG采样个数作为信号特征。设定阈值并将正负阈值间距离等分成不同幅值段,检测各幅值段的信号个数,阈值水平和分段数可根据实验而定,反映研究肌肉收缩特征及变化规律。 | |
| iEMG值[ | 指一定时间窗口内肌肉参与活动的运动单位放电总量,由离散sEMG信号的绝对值之和取平均求得,在中等负荷范围内,iEMG伴随肌力的增加和疲劳的产生而增长,反映肌肉激活程度。iEMG值计算公式为iEMG=( |xi|)/n。 | |
| 时域 | RMS[ | 指一定时间窗口内肌电幅值平方和均值的平方根,在中等负荷范围内,iEMG伴随肌力的增加和疲劳的产生而增长,反映肌肉活动强弱。肌电RMS计算公式为RMS= ,可结合多运动周期RMS的峰值或标准差进行助力效能评估。 |
| 最大自主等长收缩(Maximal Voluntary Isometric Contraction, MVIC)[ | 指受试者进行抗阻运动时认为输出最高努力水平的肌电值,一般由RMS平滑滤波后取最值获得,通过比较进行最大自主收缩时目标肌肉原始肌电信号的变化,反映肌肉爆发力及疲劳情况。 | |
| 肌肉发力强度(Percentage of Maximal Voluntary Isometric Contraction, MVIC%)[ | 指一定时间窗口内归一化的肌电RMS,通常使用最大自主收缩肌电值(或多周期肌电RMS均值)作为归一化分母,反映肌肉产能情况。肌肉发力强度计算公式为MVIC%=RMS/MVIC×100%。可通过交叉相关分析,确定不同条件下sEMG信号在时域曲线形状上的相似性,相关系数计算方法为$R=\left(\sum M V I C \%_{i}^{\mathrm{EXO}} \cdot M V I C \%_{i}^{\mathrm{NONE}}\right) /\left[\left(\sum M^{2} I C \%_{i}^{\text {EXO }}\right)^{1 / 2}\left(\sum M V I C \%_{i}^{\text {NONE }}\right)^{1 / 2}\right], M V I C \%_{i}^{\text {EXO }} 、 M V I C \%_{i}^{\mathrm{NONE}}$分别为穿戴、未穿戴外骨骼时长度为n的时间窗口内第i个MVIC%数值。 | |
| Welch谱估计方法[ | 指一种用于估计随机信号PSD的改进平均周期图法,可通过每个频率成分处的功率谱值占总功率的百分比形式,表示外骨骼助力前后肌电信号的功率幅度变化。 | |
| 中位频率(Median Frequency, MF)[ | 指肌肉收缩放电频率的中值,在静态收缩中,MF伴随运动时长增加而递减、伴随肌力的增加而增长,且受骨骼肌快慢肌纤维组成比例的影响,快肌纤维兴奋表现为高频放电,慢肌纤维则在低频,具有抗噪声干扰性强、适应负荷范围较广的特点。MF率计算公式为MF=0.5 PSD(f)df。 | |
| 频域 | 平均功率频率(Mean Power Frequency, MPF)[ | 指肌肉收缩放电频率的平均值,在静态收缩中,MPF伴随疲劳的产生而降低,且对于低负荷条件下的频谱变化高度敏感。MPF计算公式为 fPSDMPF fPSD=(f)df/ fPSD(f)df。 |
| FI指数[ | 指通过对比不同频率能量的比例,评估肌电功率谱的偏移情况,FI指数伴随疲劳的产生而增加,理论上可取得比MPF和MF更高的灵敏度。FI指数计算公式为 fFI f=-1PSD(f)df/ PSD(f)df,分子部分强调疲劳过程中功率谱低频成分的增多,分母部分强调功率谱高频成分的减少。 | |
| 类型 | 指标 | |
|---|---|---|
| 关节运动学参数 | 关节活动范围(Range of Motion, ROM)[ | |
| 运动学 | 人体运动中心 | 质心(Center of Mass, COM)[ |
| 基本步态参数 | 步长[ | |
| 描述性步态参数 | 步长不对称性[ | |
| 人机交互力 | 足底压力[ | |
| 动力学 | 关节动力学参数 | 关节力矩[ |
| 执行器输出 | 产生力矩[ | |
Table 4 Kinematic and kinetic assessment indices
| 类型 | 指标 | |
|---|---|---|
| 关节运动学参数 | 关节活动范围(Range of Motion, ROM)[ | |
| 运动学 | 人体运动中心 | 质心(Center of Mass, COM)[ |
| 基本步态参数 | 步长[ | |
| 描述性步态参数 | 步长不对称性[ | |
| 人机交互力 | 足底压力[ | |
| 动力学 | 关节动力学参数 | 关节力矩[ |
| 执行器输出 | 产生力矩[ | |
| 类型 | 测试协议 | |
|---|---|---|
| 重复性运动任务 | 下肢 | 6min步行测试(6-Minute Walk Test, 6MWT)[ |
| 上肢 | 静态举重测试[ | |
| 模式切换任务 | 下肢 | 定时起行运动(Timed-Up-and-Go,TUG)[ |
| 上肢 | 方盒方块测试[ | |
| 其他特定任务 | 穿卸测试[ | |
Table 5 Work performance evaluation methods
| 类型 | 测试协议 | |
|---|---|---|
| 重复性运动任务 | 下肢 | 6min步行测试(6-Minute Walk Test, 6MWT)[ |
| 上肢 | 静态举重测试[ | |
| 模式切换任务 | 下肢 | 定时起行运动(Timed-Up-and-Go,TUG)[ |
| 上肢 | 方盒方块测试[ | |
| 其他特定任务 | 穿卸测试[ | |
| 类型 | 量表 |
|---|---|
| 行走功能测评 | 功能性运动分类(Functional Ambulatory Category, FAC)[ |
| 肢体平衡功能测评 | 伯格平衡量(Berg Balance Scale, BBS)表[ |
| 下肢痉挛程度测评 | 脊髓痉挛评估工具(Spinal Cord Assessment Tool for Spasticity, SCATS)[ |
| 神经性疼痛程度测评 | 疼痛评估量(Pain Scales Evaluation, PSE)表[ |
Table 6 Commonly used rehabilitation exoskeleton assisting effectiveness evaluation scales
| 类型 | 量表 |
|---|---|
| 行走功能测评 | 功能性运动分类(Functional Ambulatory Category, FAC)[ |
| 肢体平衡功能测评 | 伯格平衡量(Berg Balance Scale, BBS)表[ |
| 下肢痉挛程度测评 | 脊髓痉挛评估工具(Spinal Cord Assessment Tool for Spasticity, SCATS)[ |
| 神经性疼痛程度测评 | 疼痛评估量(Pain Scales Evaluation, PSE)表[ |
| 类型 | 量表 | 原理 |
|---|---|---|
| 认知努力与疲劳程度测评 | 自感用力度(Rating of Perceived Exertion, RPE) [ | 采用10分制Likert型量表对认知工作量进行评分,将运动程度定级为轻微运动(1分)、轻度运动(2~3分)、中度运动(4~6分)、剧烈运动(7~8分)、超剧烈运动(9分)和最大努力运动(10分),用于评估外骨骼用户主观努力付出,具有较高可靠性,但缺乏条目内容有效性的检验。 |
| 美国航空航天局任务负荷指数(NASA-Task Load Index, NASA-TLX)[ | 采用10分制Likert型量表对心理需求、生理需求、时间需求、表现绩效、努力程度和受挫程度6个项目进行评分,用于衡量外骨骼用户在执行任务时的主观努力程度,其基本模型概念定义明确,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| 主观工作量评估技术(Subjective Workload Assessment Technique, SWAT)[ | 由时间负荷、心理努力负荷和心理压力负荷3项问卷组成,用于评估外骨骼使用过程中的认知工作量,其基本模型概念定义明确,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| 可用性与舒适度测评 | 视觉模拟量(Visual Analog Scale, VAS)表[ | 采用10分制Likert型量表进行评分,通过可视化的彩色表情图标反映感知疼痛,并将其定级为无疼痛(0分)、轻度(1~3分)、中度(4~6分)、重度(7~9分)和超重度(10分),用于评估个体的主观疼痛感受,侧面反映外骨骼可用性。 |
| SUS表[ | 采用5分制Likert型量表对10项一维心理测评问卷进行评分,包括奇数项的正面陈述与偶数项的负面陈述,用于外骨骼等人机交互系统用户进行快速可用性评估。 | |
| 自我评估模型(Self-Assessment Manikin, SAM) [ | 采用非语义的图形评估技术对愉悦度、唤醒度与受控度三组图标进行9分制评分,用于衡量外骨骼用户的情绪反馈,具有测量简便直观的优点,但缺乏结果可靠性的检验且未提供评估程序描述。 | |
| 魁北克辅助技术满意度评估2.0(Quebec User Evaluation of Satisfaction with Assistive Technology 2.0, QUEST 2.0)[ | 采用5分制Likert型量表对12项二维心理测量问卷进行评分,包含尺寸、重量、安全性、耐用性、操作易用性和舒适性等8个辅助设备项目以及设备维修、设备售后等4个设备服务项目,1~5分依序表示非常不满意到非常满意,用于评估外骨骼等辅助设备特定功能及相关服务的用户满意度,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| AttrakDiff量表[ | 采用7分制Likert型量表对28项三维心理测量问卷进行评分,包括设备实用性、娱乐性及吸引力3个维度,用于评衡量外骨骼等人机交互系统的主观易用性与可接受程度。Cronbach's α分析显示条目内容可靠性良好,且支持同时评估多个外骨骼产品或一个产品的多个改进版本,但缺乏有效性的检验。 |
Table 7 Commonly used subjective perception evaluation scales
| 类型 | 量表 | 原理 |
|---|---|---|
| 认知努力与疲劳程度测评 | 自感用力度(Rating of Perceived Exertion, RPE) [ | 采用10分制Likert型量表对认知工作量进行评分,将运动程度定级为轻微运动(1分)、轻度运动(2~3分)、中度运动(4~6分)、剧烈运动(7~8分)、超剧烈运动(9分)和最大努力运动(10分),用于评估外骨骼用户主观努力付出,具有较高可靠性,但缺乏条目内容有效性的检验。 |
| 美国航空航天局任务负荷指数(NASA-Task Load Index, NASA-TLX)[ | 采用10分制Likert型量表对心理需求、生理需求、时间需求、表现绩效、努力程度和受挫程度6个项目进行评分,用于衡量外骨骼用户在执行任务时的主观努力程度,其基本模型概念定义明确,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| 主观工作量评估技术(Subjective Workload Assessment Technique, SWAT)[ | 由时间负荷、心理努力负荷和心理压力负荷3项问卷组成,用于评估外骨骼使用过程中的认知工作量,其基本模型概念定义明确,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| 可用性与舒适度测评 | 视觉模拟量(Visual Analog Scale, VAS)表[ | 采用10分制Likert型量表进行评分,通过可视化的彩色表情图标反映感知疼痛,并将其定级为无疼痛(0分)、轻度(1~3分)、中度(4~6分)、重度(7~9分)和超重度(10分),用于评估个体的主观疼痛感受,侧面反映外骨骼可用性。 |
| SUS表[ | 采用5分制Likert型量表对10项一维心理测评问卷进行评分,包括奇数项的正面陈述与偶数项的负面陈述,用于外骨骼等人机交互系统用户进行快速可用性评估。 | |
| 自我评估模型(Self-Assessment Manikin, SAM) [ | 采用非语义的图形评估技术对愉悦度、唤醒度与受控度三组图标进行9分制评分,用于衡量外骨骼用户的情绪反馈,具有测量简便直观的优点,但缺乏结果可靠性的检验且未提供评估程序描述。 | |
| 魁北克辅助技术满意度评估2.0(Quebec User Evaluation of Satisfaction with Assistive Technology 2.0, QUEST 2.0)[ | 采用5分制Likert型量表对12项二维心理测量问卷进行评分,包含尺寸、重量、安全性、耐用性、操作易用性和舒适性等8个辅助设备项目以及设备维修、设备售后等4个设备服务项目,1~5分依序表示非常不满意到非常满意,用于评估外骨骼等辅助设备特定功能及相关服务的用户满意度,Cronbach's α分析显示条目内容一致性与可靠性良好。 | |
| AttrakDiff量表[ | 采用7分制Likert型量表对28项三维心理测量问卷进行评分,包括设备实用性、娱乐性及吸引力3个维度,用于评衡量外骨骼等人机交互系统的主观易用性与可接受程度。Cronbach's α分析显示条目内容可靠性良好,且支持同时评估多个外骨骼产品或一个产品的多个改进版本,但缺乏有效性的检验。 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
王晓明, 李宁, 王新兴, 等. 美国人效能增强技术发展应用[J]. 科技导报, 2021, 39(7): 96-101.
doi: 10.3981/j.issn.1000-7857.2021.07.011 |
|
|
|
| [9] |
颉翔宇, 周利坤, 司玉昌. 军用动力外骨骼的发展现状及关键技术综述[J]. 兵工自动化, 2022, 41(10): 14-20.
|
|
|
|
| [10] |
张子琛, 刘鸣, 王博崇, 等. 智能消防外骨骼的经验基础性整理与分析[J]. 今日消防, 2021, 6(6): 13-14.
|
|
|
|
| [11] |
doi: 10.1080/00140139.2010.512982 pmid: 20865609 |
| [12] |
丁逸苇, 涂利娟, 刘怡希, 等. 可穿戴式下肢外骨骼康复机器人研究进展[J]. 机器人, 2022, 44(5): 522-532.
doi: 10.13973/j.cnki.robot.220256 |
|
doi: 10.13973/j.cnki.robot.220256 |
|
| [13] |
汪宗保, 周玲玲, 王从振. 下肢外骨骼康复机器人在脑卒中病人中的临床应用研究[J]. 赤峰学院学报(自然科学版), 2021, 37(7): 50-53.
|
|
|
|
| [14] |
陈俞鹏, 王海波, 薛朝军, 等. 工业装配抗振外骨骼动力学仿真及试验[J]. 中国机械工程, 2023, 34(4): 404-413.
|
|
|
|
| [15] |
陈勇刚, 王军, 王道昌. 敏捷型无动力人体外骨骼在飞机装配中的探索与应用[J]. 科技创新与应用, 2021, 11(20): 23-25.
|
|
|
|
| [16] |
田大肥, 王哲. 工业装配外骨骼的发展现状[J]. 现代制造技术与装备, 2020, 278(1): 155-156.
|
|
|
|
| [17] |
Robots and robotic devices—Safety requirements for personal care robots:ISO13482:2014[S]. Geneva, Switzerland: International Organization for Standardization, 2014.
|
| [18] |
Medical electrical equipment— Part 2-78: particular requirements for basic safety and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation: IEC80601-2-78:2019[S]. Geneva, Switzerland: International Organization for Standardization, 2019.
|
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1080/00140139.2015.1081988 pmid: 26444053 |
| [22] |
刘则渊, 陈悦, 侯海燕. 科学知识图谱:方法与应用[M]. 北京: 人民出版社, 2008.
|
|
|
|
| [23] |
pmid: 11083138 |
| [24] |
|
| [25] |
doi: 10.1186/s12984-016-0111-3 pmid: 26817449 |
| [26] |
doi: 10.1186/s12984-017-0235-0 pmid: 28449684 |
| [27] |
|
| [28] |
|
| [29] |
赵明升, 宋遒志, 刘亚丽, 等. 外骨骼机器人助力效率测试技术研究[J]. 机械设计与制造, 2022, 43(5): 257-260.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
doi: 10.1186/s12984-016-0150-9 pmid: 27169361 |
| [33] |
高增桂. 柔性穿戴式搬运辅助装备人机工程设计与评价研究[D]. 杭州: 浙江大学, 2016.
|
|
|
|
| [34] |
|
| [35] |
刘亚丽, 宋遒志, 赵明升, 等. 基于力位混合控制的踝关节外骨骼机器人四段式助力技术[J]. 兵工学报, 2021, 42(12): 2722-2730.
doi: 10.3969/j.issn.1000-1093.2021.12.020 |
|
doi: 10.3969/j.issn.1000-1093.2021.12.020 |
|
| [36] |
杨国庆. 负重外骨骼性能评估与疲劳寿命试验[D]. 重庆: 重庆理工大学, 2022.
|
|
|
|
| [37] |
|
| [38] |
|
| [39] |
doi: S1877-0657(18)30005-8 pmid: 29371106 |
| [40] |
|
| [41] |
余红刚. 下肢柔性外骨骼的研究与设计[D]. 成都: 电子科技大学, 2020.
|
|
|
|
| [42] |
pmid: 10090332 |
| [43] |
pmid: 12183473 |
| [44] |
|
| [45] |
|
| [46] |
doi: 10.1186/s12984-019-0585-x pmid: 31752911 |
| [47] |
|
| [48] |
doi: 10.1093/icb/icu033 pmid: 24838747 |
| [49] |
pmid: 9286599 |
| [170] |
李龙飞, 朱凌云, 苟向锋. 可穿戴下肢外骨骼康复机器人研究现状与发展趋势[J]. 医疗卫生装备, 2019, 40(12): 89-97.
|
|
|
|
| [50] |
|
| [51] |
|
| [52] |
王健, 金小刚. 表面肌电信号分析及其应用研究[J]. 中国体育科技, 2000, 36(8): 26-28.
|
|
|
|
| [53] |
pmid: 21804298 |
| [54] |
doi: 10.1161/STROKEAHA.108.527374 pmid: 19109546 |
| [55] |
汤纬地. 基于表面肌电的上肢运动分析关健技术研究[D]. 合肥: 中国科学技术大学, 2021.
|
|
|
|
| [56] |
王笃明, 王健, 葛列众. 肌肉疲劳的sEMG时频分析技术及其在工效学中的应用[J]. 航天医学与医学工程, 2003, 16(5): 387-390.
|
|
|
|
| [57] |
|
| [58] |
|
| [59] |
曹恩国, 徐祺, 沈峰岑, 等. 多运动复合型被动式下肢外骨骼设计及其智能交互评估[J]. 机械工程学报, 2023, 59(11): 43-53.
doi: 10.3901/JME.2023.11.043 |
|
doi: 10.3901/JME.2023.11.043 |
|
| [60] |
|
| [61] |
周炜, 罗志增. 基于直方图和功率谱比值的肌电信号识别方法[J]. 杭州电子科技大学学报, 2009, 29(4): 63-66.
|
|
|
|
| [62] |
王立玲, 杨铮, 刘瑾. 基于积分肌电值结合双阈值的s-EMG活动段的检测[J]. 东北师大学报(自然科学版), 2018, 50(3): 65-71.
|
|
|
|
| [63] |
|
| [64] |
向馗, 李涛, 宋全军, 等. 面向外骨骼助力的肌张力信息实时获取[J]. 华中科技大学学报(自然科学版), 2011, 39(增刊2): 259-263.
|
|
|
|
| [65] |
霍金月, 喻洪流, 王峰, 等. 穿戴式下肢外骨骼助行机器人系统研究[J]. 中国康复理论与实践, 2019, 25(4): 481-486.
doi: 10.3969/j.issn.1006-9771.2019.04.021 |
|
|
|
| [66] |
郑立京, 王卓, 陈灵星. 一种踝关节柔性助力外骨骼系统设计[J]. 机电工程技术, 2022, 51(4): 47-50, 193.
|
|
|
|
| [67] |
|
| [68] |
|
| [69] |
doi: 10.1186/s12984-018-0393-8 pmid: 29914505 |
| [70] |
|
| [71] |
高志华, 郭君扬, 潘春生. 下肢支撑外骨骼在模拟装配任务中的辅助效果评估[J]. 机械设计, 2021, 38(5): 93-98.
|
|
|
|
| [72] |
王存金, 董林杰, 李杰, 等. 基于人行走能耗分析的踝关节外骨骼设计[J]. 机械工程学报, 2021, 57(19): 79-92.
doi: 10.3901/JME.2021.19.008 |
|
doi: 10.3901/JME.2021.19.008 |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
黄耐寒. 基于表面肌电的肌疲劳分析与肌力预测研究及实现[D]. 合肥: 中国科学技术大学, 2014.
|
|
|
|
| [80] |
丁其川, 熊安斌, 赵新刚, 等. 基于表面肌电的运动意图识别方法研究及应用综述[J]. 自动化学报, 2016, 42(1): 13-25.
|
|
|
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
doi: 10.1109/TNSRE.2011.2163083 pmid: 21968791 |
| [87] |
|
| [88] |
|
| [89] |
doi: 10.1109/TNSRE.2020.3009317 pmid: 32746320 |
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [99] |
|
| [100] |
陆阿明, 王国栋, 王芳. 运动性疲劳对跑运动学与下肢肌电的影响[J]. 体育科学, 2012, 32(6): 44-49, 80.
|
|
|
|
| [101] |
doi: 10.1109/LRA.2019.2908491 |
| [102] |
|
| [103] |
doi: 10.1109/TNSRE.2016.2595501 pmid: 27479974 |
| [104] |
|
| [105] |
邹晓峰. 士兵在负重行军时步态的生物力学特征[D]. 北京: 北京体育大学, 2010.
|
|
|
|
| [106] |
doi: 10.1080/10790268.2017.1313932 pmid: 28424026 |
| [107] |
|
| [108] |
doi: 10.1186/s12984-018-0360-4 pmid: 29534730 |
| [109] |
doi: 10.1109/TNSRE.2014.2346193 pmid: 25134084 |
| [110] |
doi: 10.1038/s41393-017-0013-7 pmid: 29105657 |
| [111] |
|
| [112] |
王月朋. 下肢外骨骼助力机器人稳定性判别研究[D]. 合肥: 安徽工程大学, 2021.
|
|
|
|
| [113] |
|
| [114] |
雷兵. 协行助力机械腿结构优化及性能评估系统研究[D]. 上海: 华东理工大学, 2011.
|
|
|
|
| [115] |
|
| [116] |
|
| [117] |
|
| [118] |
|
| [119] |
|
| [120] |
|
| [121] |
|
| [122] |
doi: 10.3389/fnbot.2020.00031 pmid: 32714175 |
| [123] |
|
| [124] |
doi: 10.1186/s12984-017-0267-5 pmid: 28651596 |
| [125] |
|
| [126] |
袁小庆, 姬俊杰, 刘宇轩, 等. 主被动结合的上下肢一体化助力外骨骼机器人的设计与效能评估[J]. 机械工程学报, 2022, 58(21): 27-37.
doi: 10.3901/JME.2022.21.027 |
|
doi: 10.3901/JME.2022.21.027 |
|
| [127] |
|
| [128] |
|
| [129] |
|
| [130] |
张苹苹. 工业用下肢支撑外骨骼设计与评估研究[J]. 现代制造工程, 2021, 2021(7): 16-22.
|
|
|
|
| [131] |
doi: 10.1109/TOH.2015.2417570 pmid: 25838528 |
| [132] |
|
| [133] |
doi: S0003-9993(19)31119-0 pmid: 31568761 |
| [134] |
|
| [135] |
|
| [136] |
doi: 10.1310/sci17-00014 pmid: 29434463 |
| [137] |
doi: 10.1016/j.spinee.2014.03.042 pmid: 24704677 |
| [138] |
|
| [139] |
doi: 10.1097/MRR.0000000000000132 pmid: 26288120 |
| [140] |
|
| [141] |
doi: 10.1186/s12984-018-0377-8 pmid: 29695280 |
| [142] |
VAN DIJSSELDONK R B,
|
| [143] |
|
| [144] |
|
| [145] |
|
| [146] |
|
| [147] |
doi: 10.1186/s12984-023-01165-0 pmid: 37046307 |
| [148] |
|
| [149] |
doi: 10.1177/0018720820907450 pmid: 32202434 |
| [150] |
doi: 10.1109/TNSRE.2018.2875738 pmid: 30334764 |
| [151] |
崔谨想. 下肢外骨骼机器人系统建模与仿真实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2014.
|
|
|
|
| [152] |
李玟卓, 喻洪流, 王多琎. 穿戴式下肢外骨骼机器人测试平台设计与动力学分析[J]. 生物医学工程学进展, 2022, 43(2): 63-67.
|
|
|
|
| [153] |
鲁泽华, 管小荣, 樊黎霞. 面向助力外骨骼效能评估的灰色层次分析法[J]. 机械设计与制造, 2018, 39(5): 249-252.
|
|
|
|
| [154] |
李佳璐, 涂细凯, 伍赛, 等. 基于用户体验的外骨骼机器人舒适性研究[J]. 机械设计, 2019, 36(7): 125-130.
|
|
|
|
| [155] |
陈建华, 穆希辉, 杜峰坡, 等. 评价指标体系下的外骨骼支撑相控制效果[J]. 科技导报, 2019, 37(13): 88-92.
doi: 10.3981/j.issn.1000-7857.2019.13.013 |
|
|
|
| [156] |
徐兰兰. 助力外骨骼性能评价指标和方法[D]. 成都: 电子科技大学, 2021.
|
|
|
|
| [157] |
doi: 10.1177/0018720819868122 pmid: 31419179 |
| [158] |
|
| [159] |
|
| [160] |
|
| [161] |
doi: 10.1186/s12984-023-01185-w pmid: 37149621 |
| [162] |
|
| [163] |
doi: 10.1080/10400435.2017.1352051 pmid: 28700324 |
| [164] |
|
| [165] |
doi: 10.1186/s12984-017-0312-4 pmid: 29025427 |
| [166] |
doi: 10.1177/0018720819883500 pmid: 31928418 |
| [167] |
赵新刚, 谈晓伟, 张弼. 柔性下肢外骨骼机器人研究进展及关键技术分析[J]. 机器人, 2020, 42(3): 365-384.
doi: 10.13973/j.cnki.robot.190474 |
|
doi: 10.13973/j.cnki.robot.190474 |
|
| [168] |
|
| [169] |
|
| [1] | LIU Yali, LU Yanchi, MA Xunju, SONG Qiuzhi. Surface Electromyography-based Human Motion Pattern Recognition Using Convolutional Neural Networks [J]. Acta Armamentarii, 2024, 45(7): 2144-2158. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||