
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3279-3294.doi: 10.12382/bgxb.2023.0775
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
PAN Bo1,2, LI Shengfei1,2, WANG Yang1,2,*( ), TAN Senqi1,2, ZHANG Naisi1,2, LUO Tian1,2, CUI Xing1,2
), TAN Senqi1,2, ZHANG Naisi1,2, LUO Tian1,2, CUI Xing1,2
Received:2023-08-21
Online:2023-11-01
Contact:
WANG Yang
CLC Number:
PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit[J]. Acta Armamentarii, 2023, 44(11): 3279-3294.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Autonomous formula race car

Fig.2 Simplified dynamics models of 8×8 vehicle and tire
| 参数 | 含义 |
|---|---|
| Fxwij,Fywij,Fzwij | 轮胎坐标系下每个轮胎的纵、横、垂向力 |
| Fxij,Fyij | 大地坐标系下每个轮胎的纵、横向力 |
| vx, vy, vz, ωx, ωy, ωz | 车辆质心x轴、y轴、z轴方向的速度与角速度 |
| m,ax, ay, mc, l1, l2 | 整车质量、车辆纵向加速度、车辆横向加速度、车身质量、侧倾中心与质心之间高度、俯仰中心与质心之间高度 |
| Fsij, Fssij, Fsdij | 悬架力、静态悬架力、动态悬架力 |
| δij, B, Li | 转向角、轮距、车轴与质心之间距离 |
| Ix, Iy, Iz | 车身x轴、y轴、z轴方向的转动惯量 |
| β, θ, ϕ | 车身质心的侧偏角、侧倾角、横摆角 |
| αs, CD, A, ρ, f | 路面坡度、风阻系数、迎风面积、空气密度、轮胎滚动阻力系数 |
| Je, Tij, Re, ωij | 滚动力矩、驱动力矩、轮胎半径、轮胎转速 |
| zs, zw | 悬架变形量(位移)、轮胎垂向位移 |
Table 1 Signification of symbols in vehicle model equation
| 参数 | 含义 |
|---|---|
| Fxwij,Fywij,Fzwij | 轮胎坐标系下每个轮胎的纵、横、垂向力 |
| Fxij,Fyij | 大地坐标系下每个轮胎的纵、横向力 |
| vx, vy, vz, ωx, ωy, ωz | 车辆质心x轴、y轴、z轴方向的速度与角速度 |
| m,ax, ay, mc, l1, l2 | 整车质量、车辆纵向加速度、车辆横向加速度、车身质量、侧倾中心与质心之间高度、俯仰中心与质心之间高度 |
| Fsij, Fssij, Fsdij | 悬架力、静态悬架力、动态悬架力 |
| δij, B, Li | 转向角、轮距、车轴与质心之间距离 |
| Ix, Iy, Iz | 车身x轴、y轴、z轴方向的转动惯量 |
| β, θ, ϕ | 车身质心的侧偏角、侧倾角、横摆角 |
| αs, CD, A, ρ, f | 路面坡度、风阻系数、迎风面积、空气密度、轮胎滚动阻力系数 |
| Je, Tij, Re, ωij | 滚动力矩、驱动力矩、轮胎半径、轮胎转速 |
| zs, zw | 悬架变形量(位移)、轮胎垂向位移 |

Fig.3 Dynamic limit description of 8×8 vehicle: “g-g” diagram
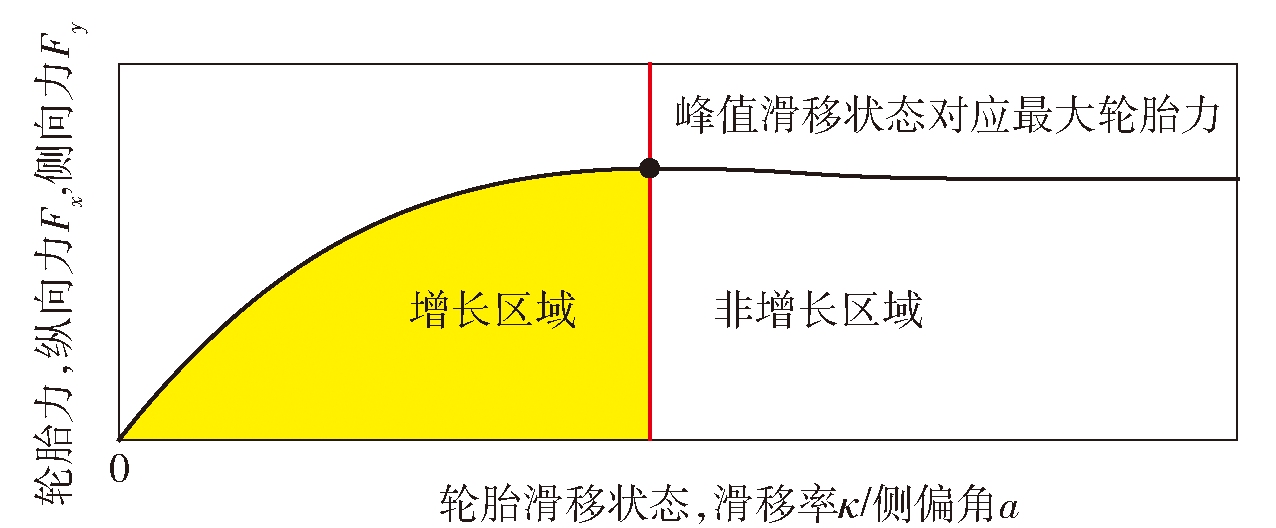
Fig.4 Typical nonlinear characteristic curve of tire mechanics

Fig.5 Slip circle of tire

Fig.6 Stability phase plane diagrams of vehicle in different conditions

Fig.7 Framework of vehicle integrated controller

Fig.8 Lateral error model of trajectory tracking for 8×8 vehicle
| 参数 | 含义 | 数值 |
|---|---|---|
| CD | 整车空气阻力系数 | 0.45 |
| f | 轮胎地面阻力系数 | 0.4 |
| ku | 纵向速度误差反馈系数 | 4000 |
| kκ | 纵向滑移误差反馈系数 | 6150 |
| kα | 纵向侧偏误差反馈系数 | 4230 |
| kno-slip | 纵向非滑移误差反馈系数 | 2500 |
| ke | 横向误差系数 | 1390 |
| kΔψ | 航向误差系数 | 545 |
| Kqd | 稳定性反馈系数 | 1320 |
| q | 稳定性权重矩阵系数 | 0.3 |
| rfd | 稳定性反馈控制权重系数 | 0.355 |
Table 2 Main parameters for simulation and experiment
| 参数 | 含义 | 数值 |
|---|---|---|
| CD | 整车空气阻力系数 | 0.45 |
| f | 轮胎地面阻力系数 | 0.4 |
| ku | 纵向速度误差反馈系数 | 4000 |
| kκ | 纵向滑移误差反馈系数 | 6150 |
| kα | 纵向侧偏误差反馈系数 | 4230 |
| kno-slip | 纵向非滑移误差反馈系数 | 2500 |
| ke | 横向误差系数 | 1390 |
| kΔψ | 航向误差系数 | 545 |
| Kqd | 稳定性反馈系数 | 1320 |
| q | 稳定性权重矩阵系数 | 0.3 |
| rfd | 稳定性反馈控制权重系数 | 0.355 |

Fig.9 Experiment site

Fig.10 Results of double line change test in simulation

Fig.11 Results of acceleration test
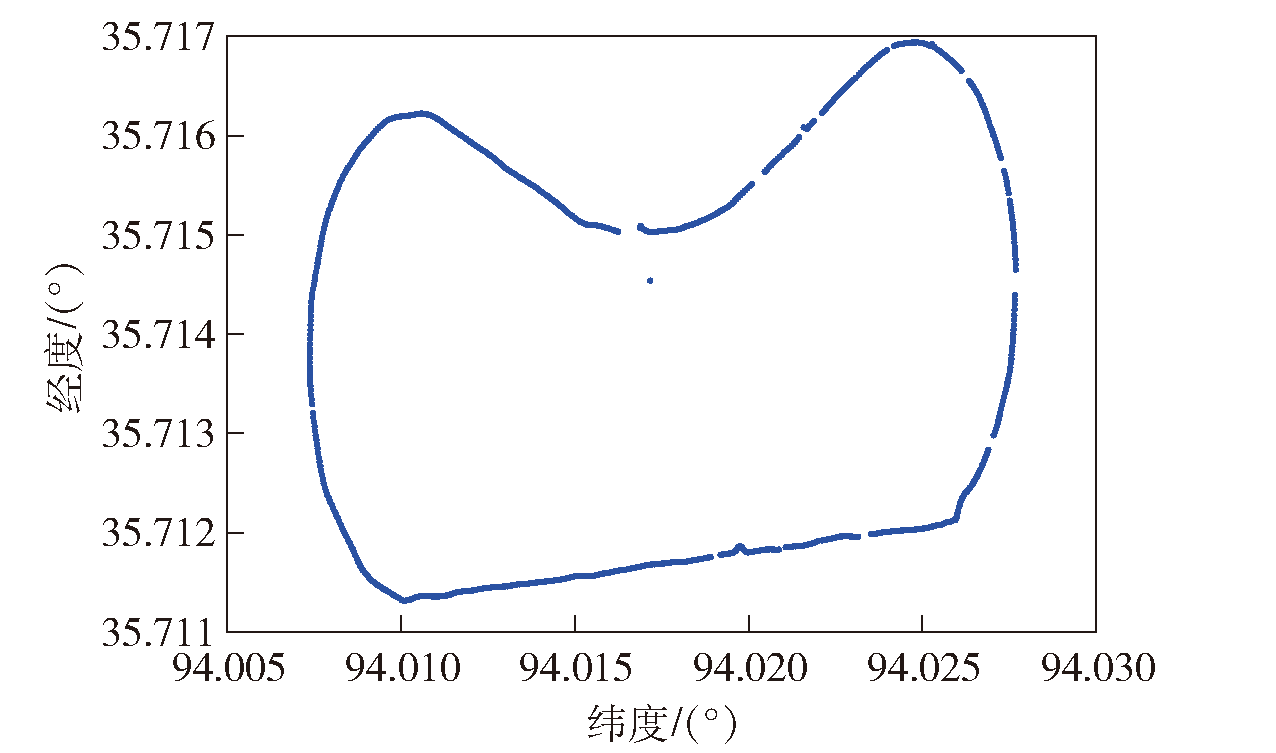
Fig.12 Trajectory positioning information in test
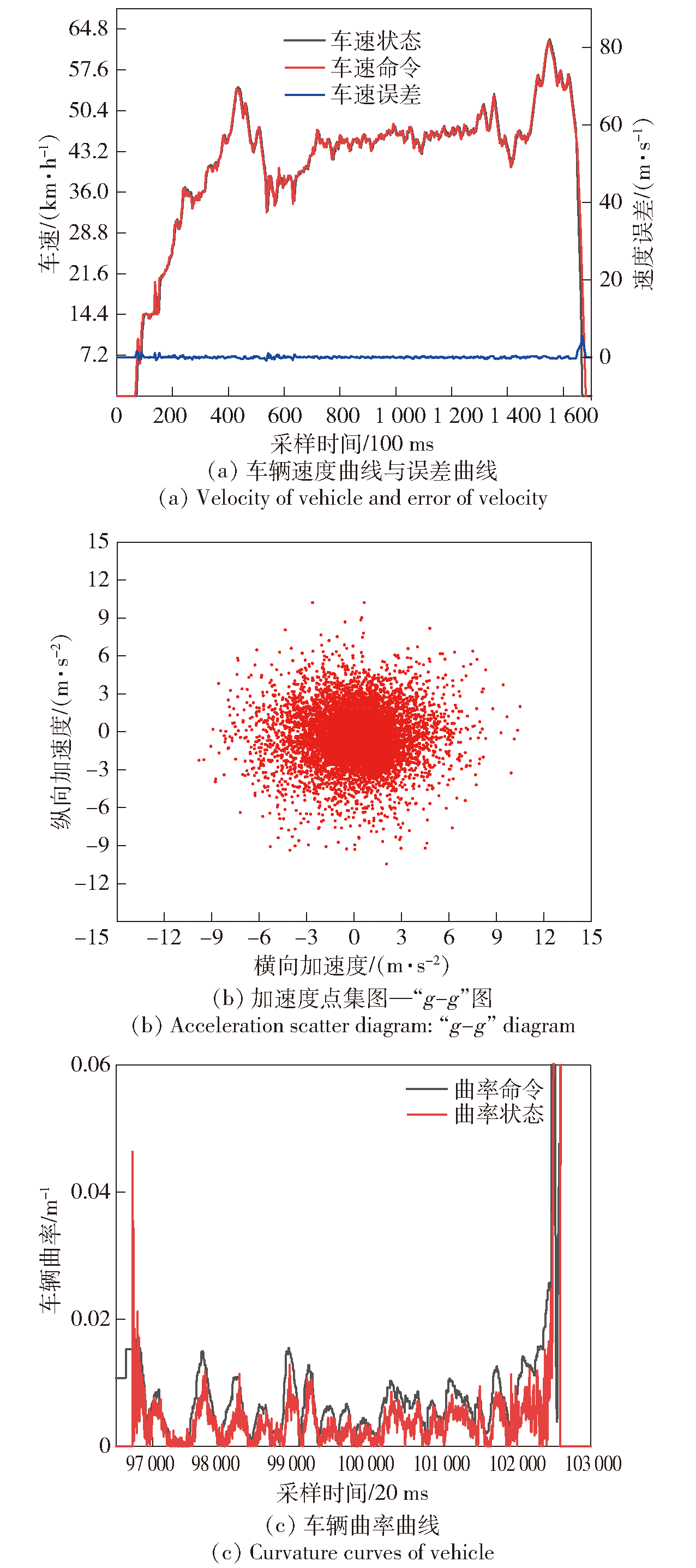
Fig.13 Results of comprehensive performance test

Fig.14 Comparison of stability performance test results

Fig.15 Comparison of distributed driving motor torque allocation effects
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
doi: 10.1109/TVT.25 URL |
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1142/S2301385023500176 URL |
| [8] |
doi: 10.1109/MITS.5117645 URL |
| [9] |
|
| [10] |
doi: 10.1016/j.jterra.2021.03.003 URL |
| [11] |
doi: 10.1007/s11227-022-04565-6 |
| [12] |
doi: 10.1002/rob.v23:9 URL |
| [13] |
doi: 10.1080/00423114.2018.1537494 URL |
| [14] |
doi: 10.1109/TVT.2022.3196315 URL |
| [15] |
|
| [16] |
|
| [17] |
doi: 10.1109/TITS.2021.3086397 URL |
| [18] |
doi: 10.1109/OJITS.2022.3181510 URL |
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1109/TCST.87 URL |
| [22] |
胡宇辉, 王旭, 胡家铭, 等. 越野环境下无人驾驶车辆技术研究综述[J]. 北京理工大学学报, 2021, 41(11): 1137-1144.
|
|
|
|
| [23] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3): 11-18.
|
|
|
|
| [28] |
doi: 10.1016/j.ymssp.2019.01.005 URL |
| [29] |
付苗苗. 高速无人车辆极限包络特性与轨迹跟踪方法研究[D]. 北京: 北京理工大学, 2016.
|
|
|
|
| [30] |
解云鹏. 极限工况下无人驾驶车辆运动控制策略研究[D]. 镇江: 江苏大学, 2021.
|
|
|
|
| [31] |
|
| [32] |
|
| [33] |
刘明春. 8×8轮毂电机驱动车辆操纵稳定性分析与控制研究[D]. 北京: 北京理工大学, 2015.
|
|
|
| [1] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [2] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [3] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [4] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [5] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [6] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [7] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [8] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [9] | GUAN Haijie, WANG Boyang, WANG Xurui, LIU Hai’ou, CHEN Huiyan. A Review on the Development of Military Unmanned Ground System with Mission Payload [J]. Acta Armamentarii, 2023, 44(11): 3333-3344. |
| [10] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [11] | WANG Bao-yuan, SHAO Xiao-jun, LIU Peng-ke, HENG Gang, CHAO Hong-xiao, LIU Jun. Research on Measuring Method of Nutation Angle of Projectile Based on Trajectory Tracking with High Speed Photography [J]. Acta Armamentarii, 2016, 37(7): 1312-1316. |
| [12] | DONG Zao-peng, WAN Lei, SUN Yu-shan, LIU Tao, LI Yue-ming, ZHANG Guo-cheng. Trajectory Tracking Control of an Underactuated Unmanned Marine Vehicle Based on Asymmetric Model [J]. Acta Armamentarii, 2016, 37(3): 471-481. |
| [13] | LI Zeng-yan, LI Xiao-min, LIU Qiu-sheng. Trajectory Tracking Algorithm for Motion Compensation of Loitering Munition under Wind Environment [J]. Acta Armamentarii, 2016, 37(12): 2377-2384. |
| [14] | SUN Yang, CHEN Hui-yan. Research on Test and Evaluation of Unmanned Ground Vehicles [J]. Acta Armamentarii, 2015, 36(6): 978-986. |
| [15] | YANG Yong-tai, RONG Ji-li, LI Jian, LIU Bin, HU Cheng-wei. Dynamic Modeling and Control of Space Manipulator with Flexible Joints and Links [J]. Acta Armamentarii, 2014, 35(7): 1003-1008. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||