
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (12): 4272-4282.doi: 10.12382/bgxb.2023.0984
Previous Articles Next Articles
XING Boyang1,2, XU Wei1,*( ), LI Yufeng2,3, ZHAO Haoyu2,3, WANG Kang2, YAN Tong2,3
), LI Yufeng2,3, ZHAO Haoyu2,3, WANG Kang2, YAN Tong2,3
Received:2023-10-07
Online:2024-03-06
Contact:
XU Wei
CLC Number:
XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Wheeled L-quadruped Robots Based on Hierarchical Decoupling[J]. Acta Armamentarii, 2024, 45(12): 4272-4282.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Panda-W wheeled-quadruped robot
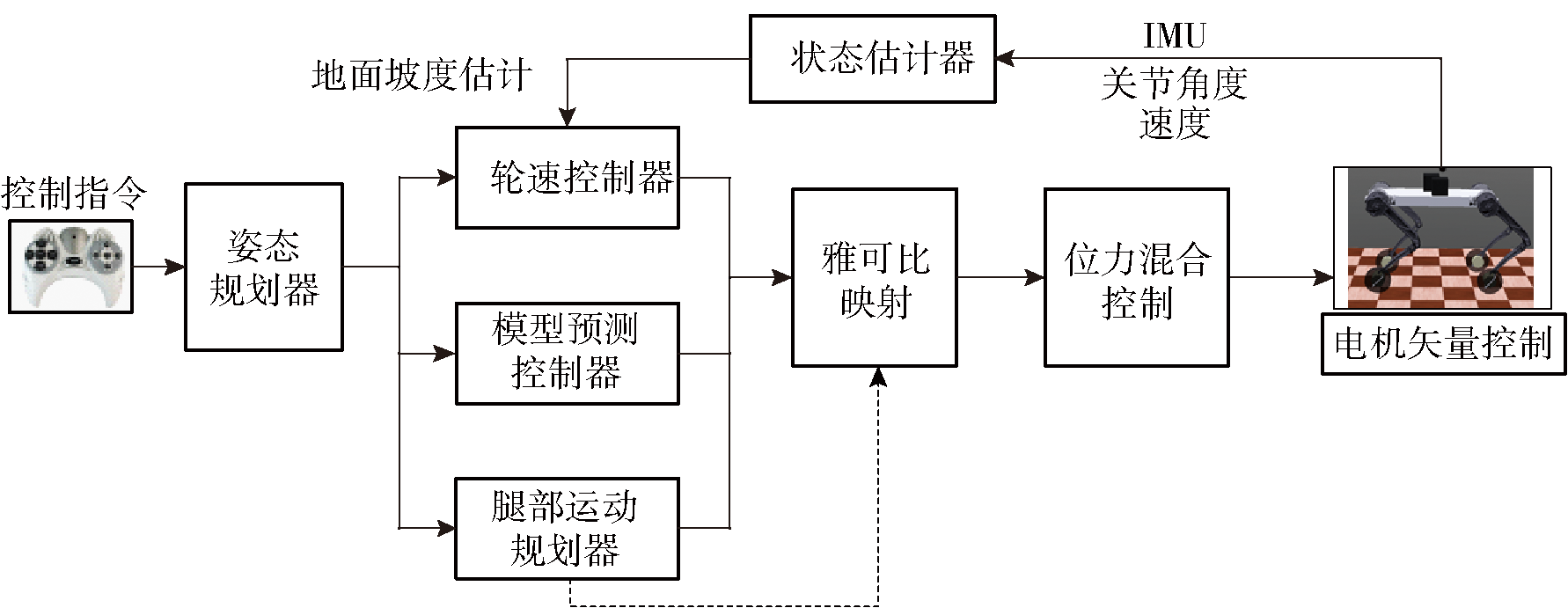
Fig.2 Block diagram of robot control system
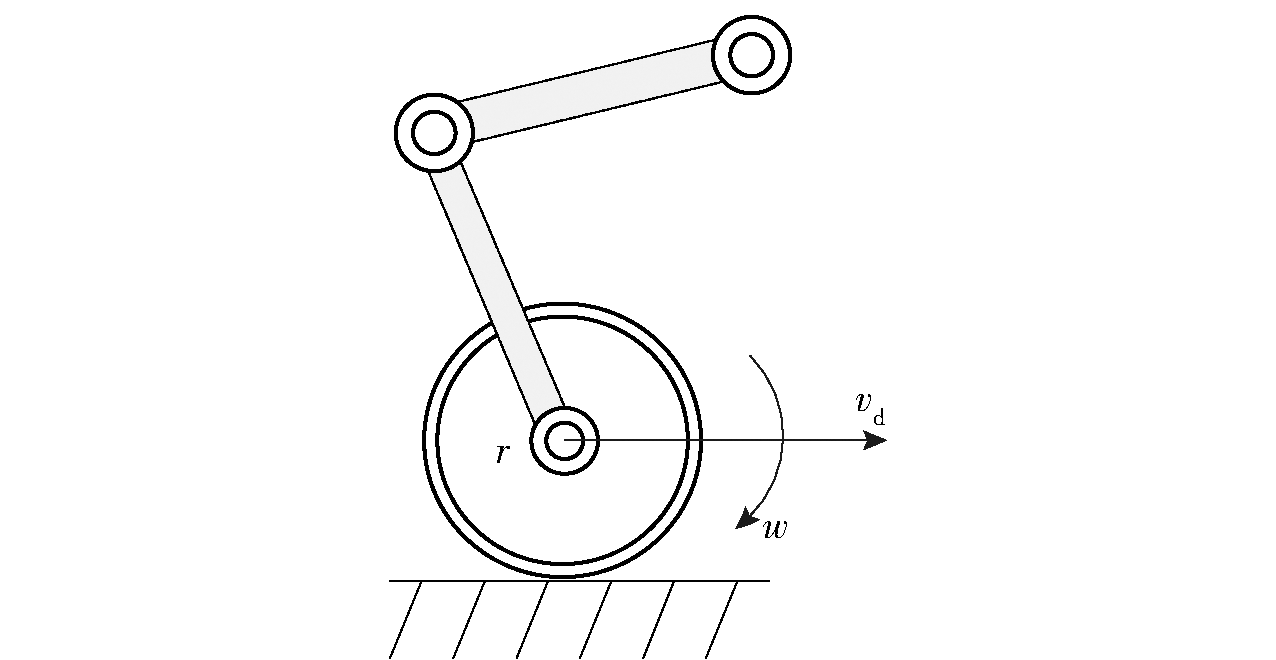
Fig.3 Single wheel control model
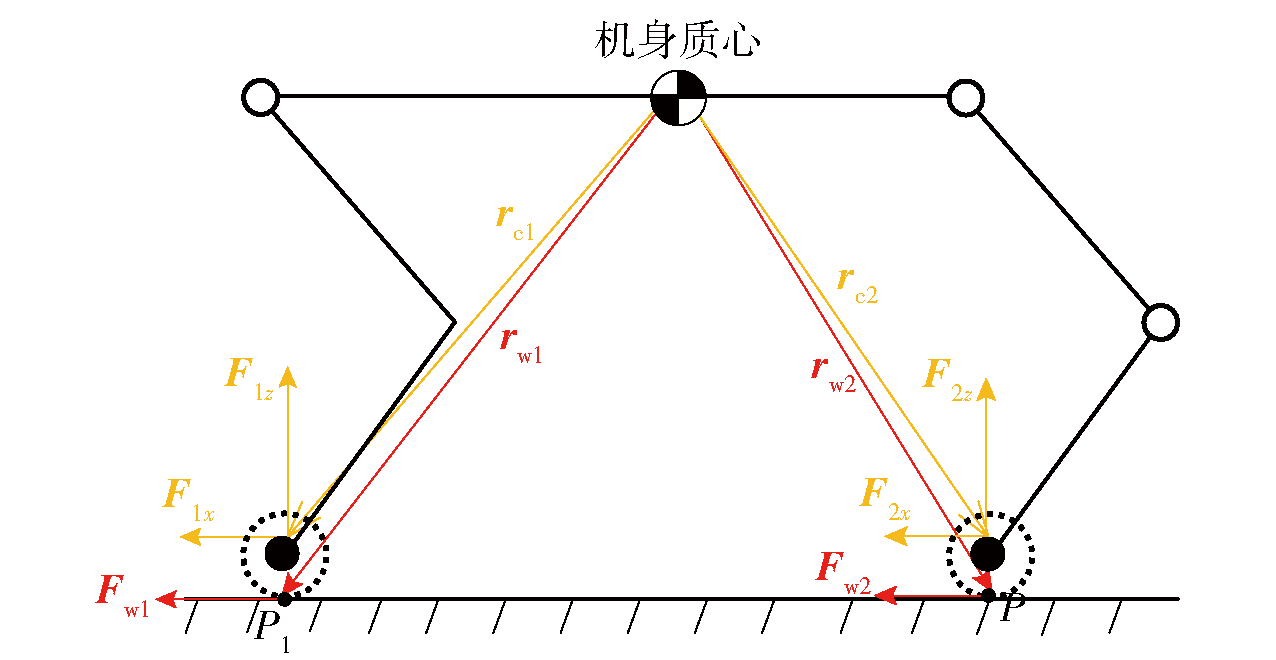
Fig.4 Force analysis diagram of sagittal plane of wheeled-quadruped robot
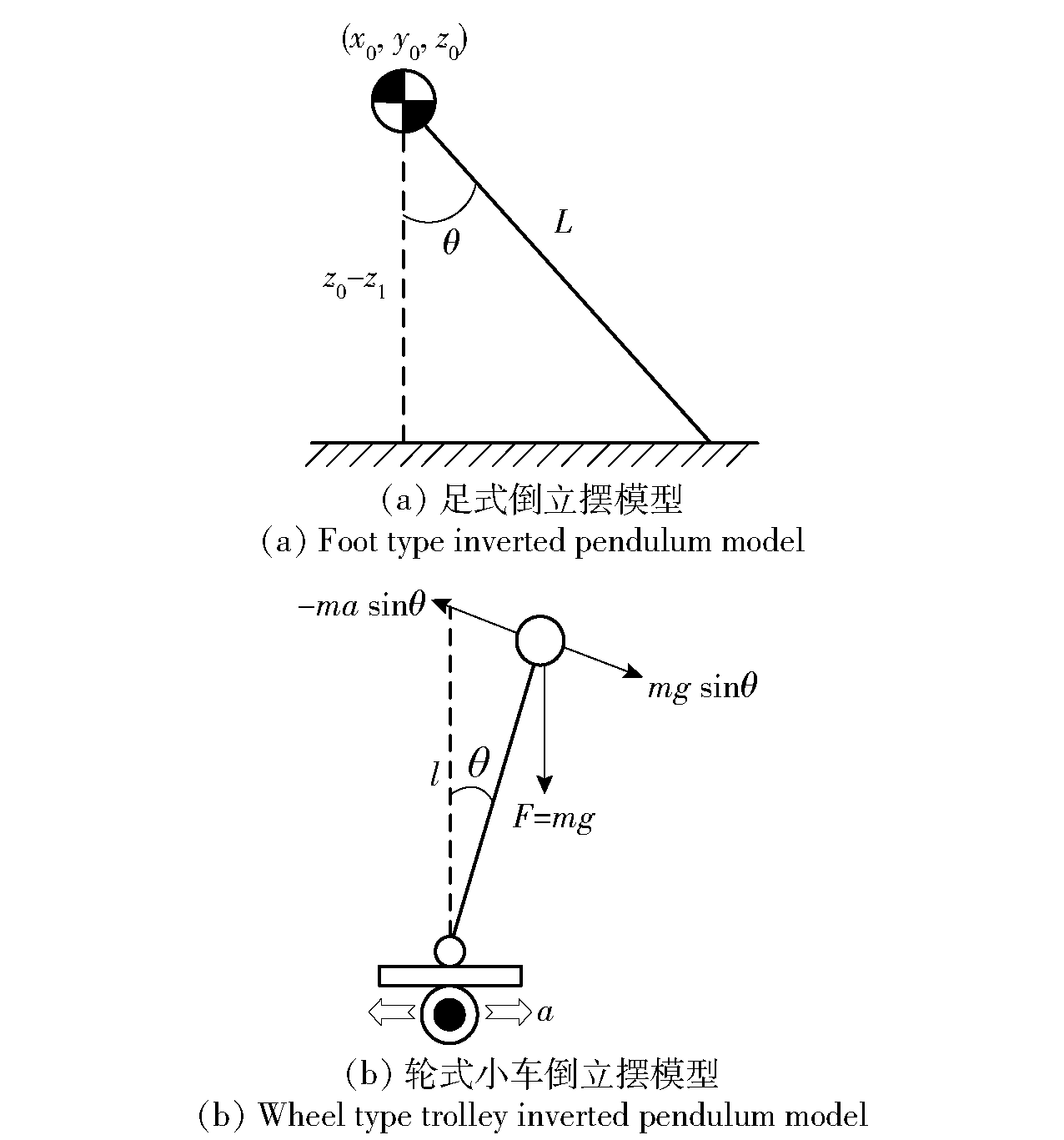
Fig.5 Swing leg foothold planning model

Fig.6 Simulation model of Panda-W
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 55 | wb/m | 0.44 |
| Ixx/(kg·m2) | 0.163 | hb/m | 0.49 |
| Iyy/(kg·m2) | 1.21 | l1/m | 0.34 |
| Izz/(kg·m2) | 1.36 | l2/m | 0.338 |
| lb/m | 0.66 | Rwheel/m | 0.187 |
Table 1 Parameters of Panda-W wheeled-quadruped robot
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 55 | wb/m | 0.44 |
| Ixx/(kg·m2) | 0.163 | hb/m | 0.49 |
| Iyy/(kg·m2) | 1.21 | l1/m | 0.34 |
| Izz/(kg·m2) | 1.36 | l2/m | 0.338 |
| lb/m | 0.66 | Rwheel/m | 0.187 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| R | 1×10-4 | [150,150,200] | |
| Qx,y,z | [200,200,1500] | K1 | 3 |
| Qψ,θ,φ | [50,50,50] | K2 | 0.3 |
| [500,500,500] |
Table 2 Parameters of controller
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| R | 1×10-4 | [150,150,200] | |
| Qx,y,z | [200,200,1500] | K1 | 3 |
| Qψ,θ,φ | [50,50,50] | K2 | 0.3 |
| [500,500,500] |
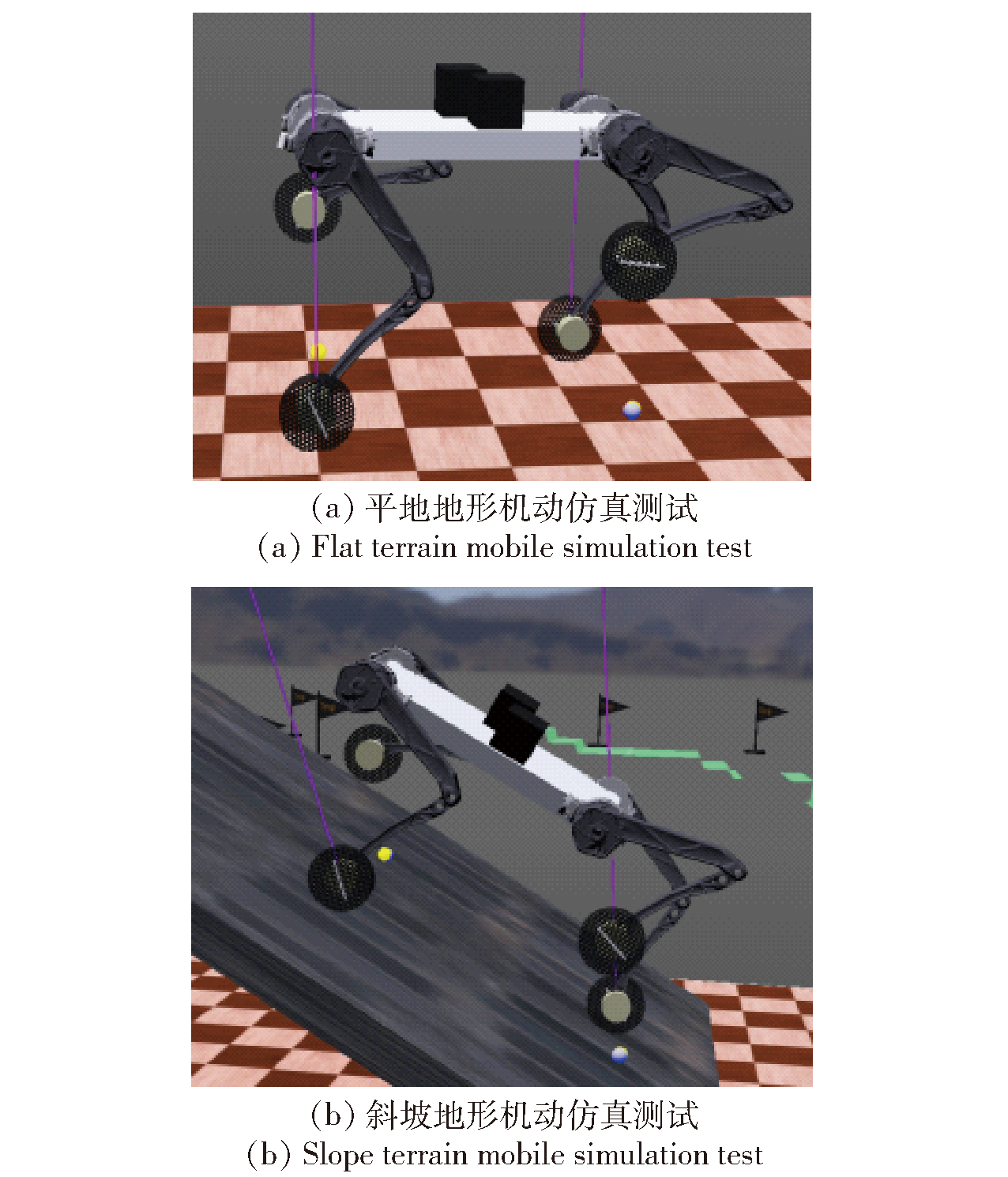
Fig.7 Webots simulated results

Fig.8 Comparison of control effects before and after compensating for wheel hub motor traction
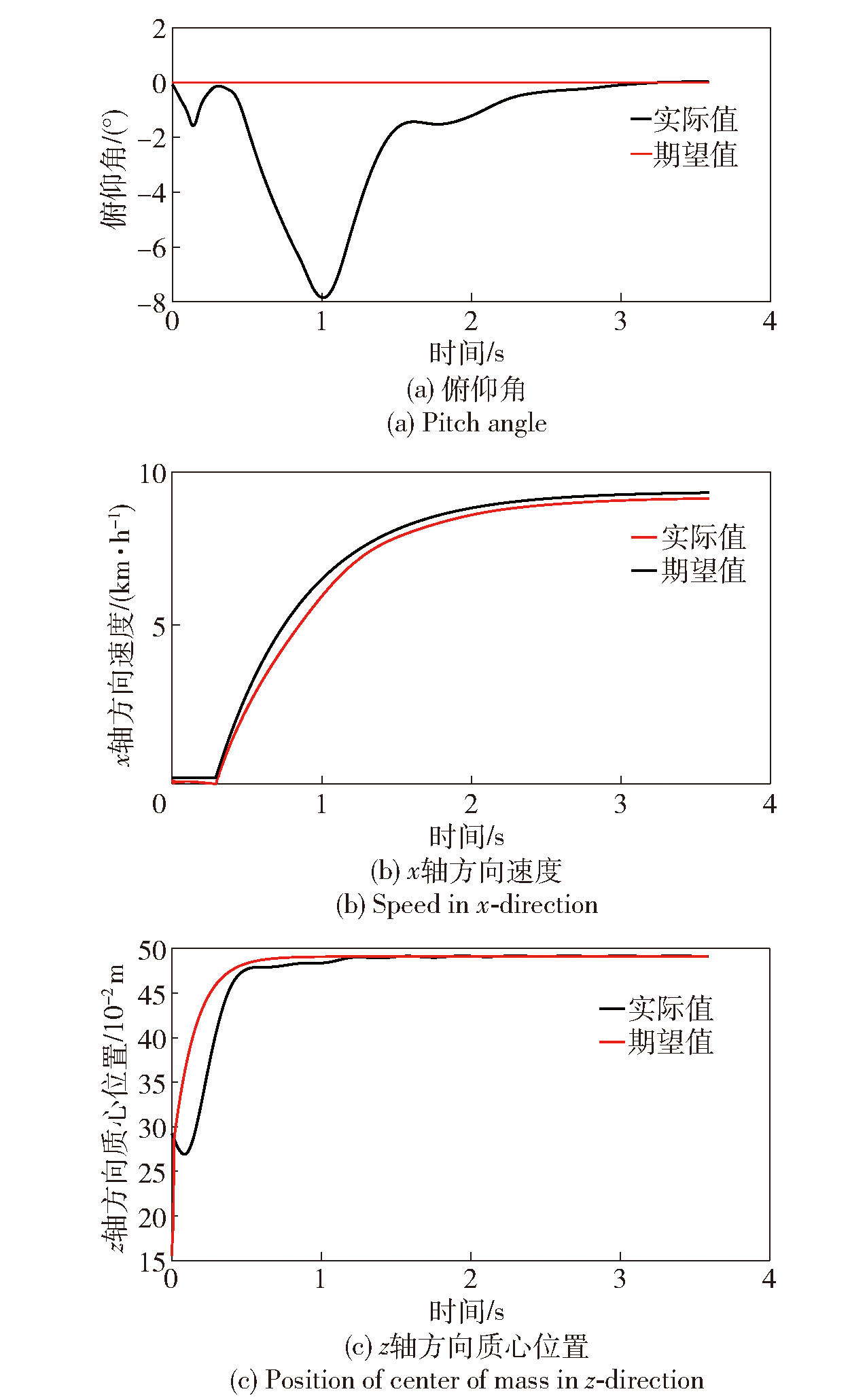
Fig.9 Experimental data diagram after compensating for the traction force of hub motor
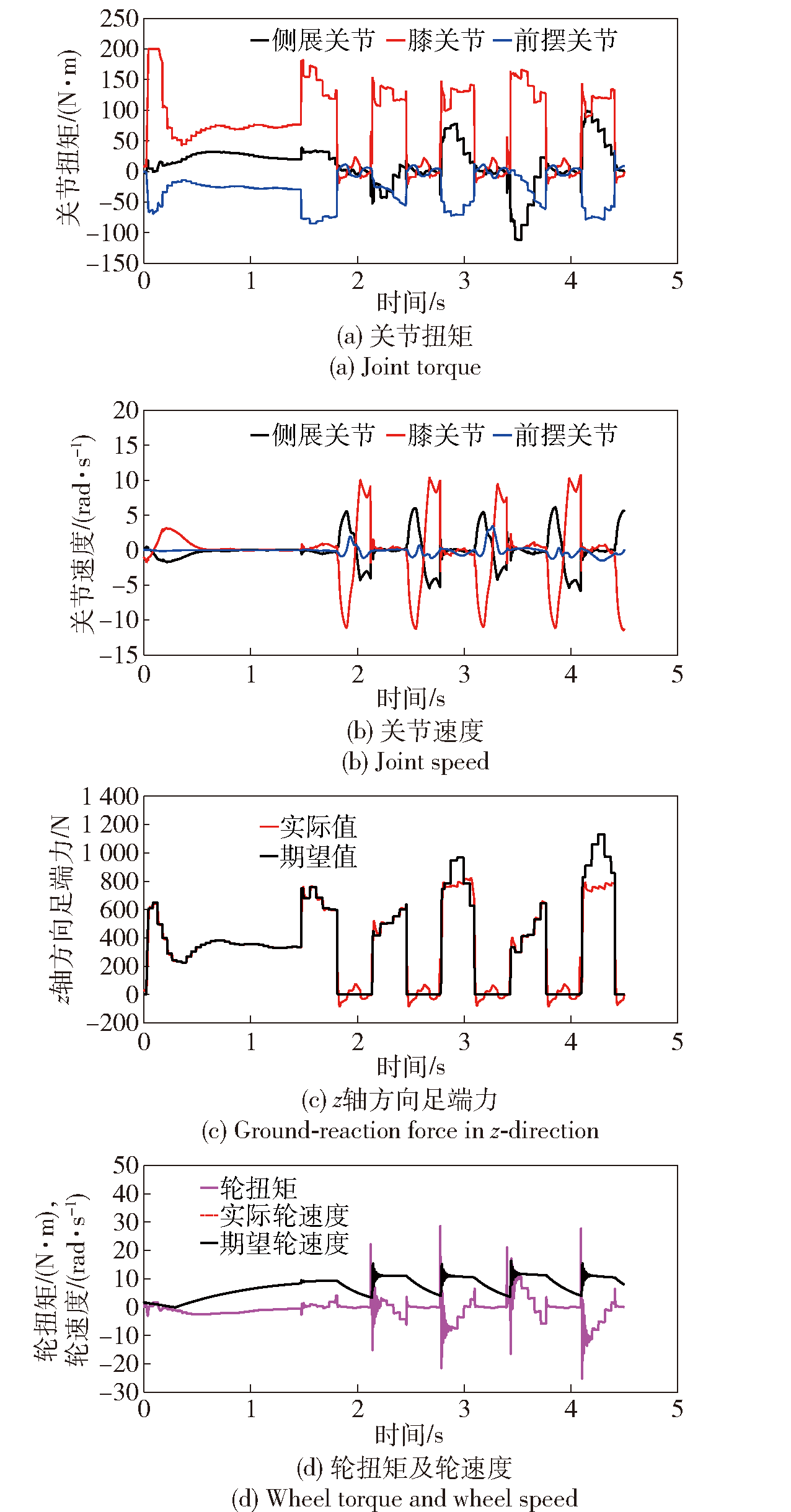
Fig.10 Ground-reaction force and motor simulation data graph
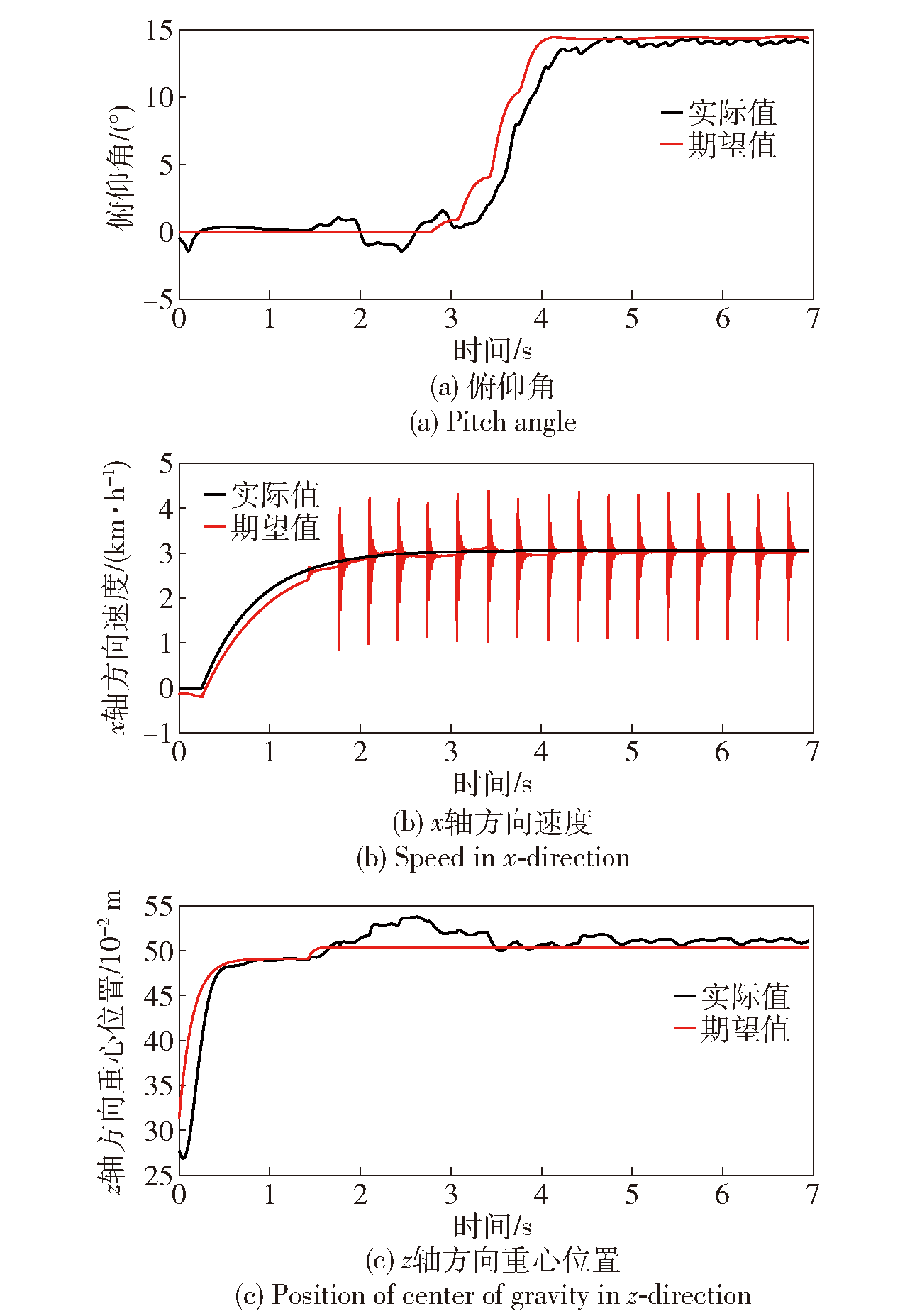
Fig.11 Simulation data of robot centroid state

Fig.12 Trotting gait experiment
Fig.13 Wheel driving gait experiment

Fig.14 Wheel-legged hybrid locomotion mode experiment
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
辛亚先. 基于分布式模型的双轮腿—臂机器人运动与作业协调控制研究[D]. 济南: 山东大学, 2021.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [1] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [2] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [3] | WANG Xu, GAO Xiaoyu, HUANG Ying, CUI Tao, LUO Chengliang. Power Coordinated Predictive Control of Hybrid Amphibious Vehicle with Model Mismatch [J]. Acta Armamentarii, 2024, 45(12): 4578-4588. |
| [4] | REN Hongbin, SUN Jiyu, Chih-Keng CHEN, ZHAO Yuzhuang, YANG Lin. LTV-MPC-based Real-time and Anti-noise Motion Control for High-speed Vehicle [J]. Acta Armamentarii, 2024, 45(12): 4311-4322. |
| [5] | WANG Tianxiang, CUI Tao, ZHANG Fujun, ZHAO Yankai. MPC-based Intake Pressure Control of Electric Compound Supercharged Diesel Engine [J]. Acta Armamentarii, 2024, 45(10): 3642-3653. |
| [6] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [7] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [8] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [9] | ZHANG Yuanbo, XIANG Changle, WANG Weida, CHEN Yongdan. A Particle Swarm Optimization and Ant Colony Optimization Fusion Algorithm-based Model Predictve Torque Coordnation Control Strategy for Distributed Electric Drive Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3253-3258. |
| [10] | JIANG Yan, DING Yuyan, ZHANG Xinglong, XU Xin. A Human-machine Collaborative Control Algorithm for Intelligent Vehicles Based on Model Prediction and Policy Learning [J]. Acta Armamentarii, 2023, 44(11): 3465-3477. |
| [11] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [12] | SONG Jiarui, TAO Gang, LI Derun, ZANG Zheng, WU Shaobin, GONG Jianwei. Robust Model Predictive Control for Manned and Unmanned Vehicle Formation Based on Parameter Self-Optimization [J]. Acta Armamentarii, 2023, 44(1): 84-97. |
| [13] | ZHOU Qiu, ZHOU Yue, SUN Hongming, GUO Wei, WU Kai, LAN Yanjun. Path Planning and Tracking Control Method of Deep-Sea Landing Vehicle [J]. Acta Armamentarii, 2023, 44(1): 298-306. |
| [14] | YANG Fan, MA Da-wei, LE Gui-gao, YAO Jia. Design of Hierarchical Control Strategy for Antiaircraft Multiple Rocket Launcher [J]. Acta Armamentarii, 2012, 33(6): 741-746. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||