
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240300-.doi: 10.12382/bgxb.2024.0300
Previous Articles Next Articles
PAN Yunwei1, LI Min1,*( ), ZENG Xiangguang1, HUANG Ao1, ZHANG Jiaheng1, REN Wenzhe1, PENG Bei2
), ZENG Xiangguang1, HUANG Ao1, ZHANG Jiaheng1, REN Wenzhe1, PENG Bei2
Received:2024-04-17
Online:2025-04-30
Contact:
LI Min
PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning[J]. Acta Armamentarii, 2025, 46(4): 240300-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Simplified AUV model

Fig.2 Schematic diagram of coordinate system for AUV path planning and trajectory tracking
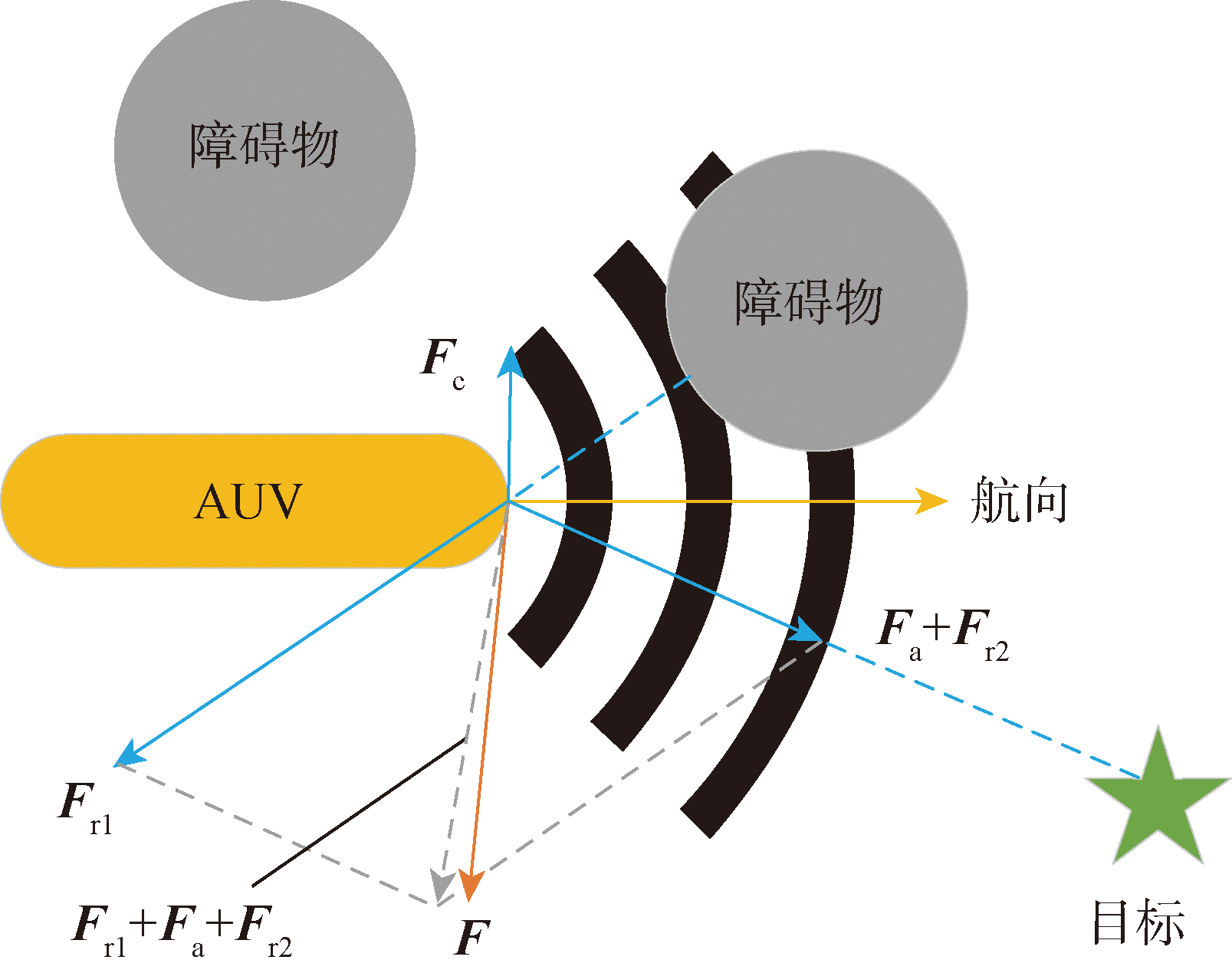
Fig.3 Schematic diagram of an APF
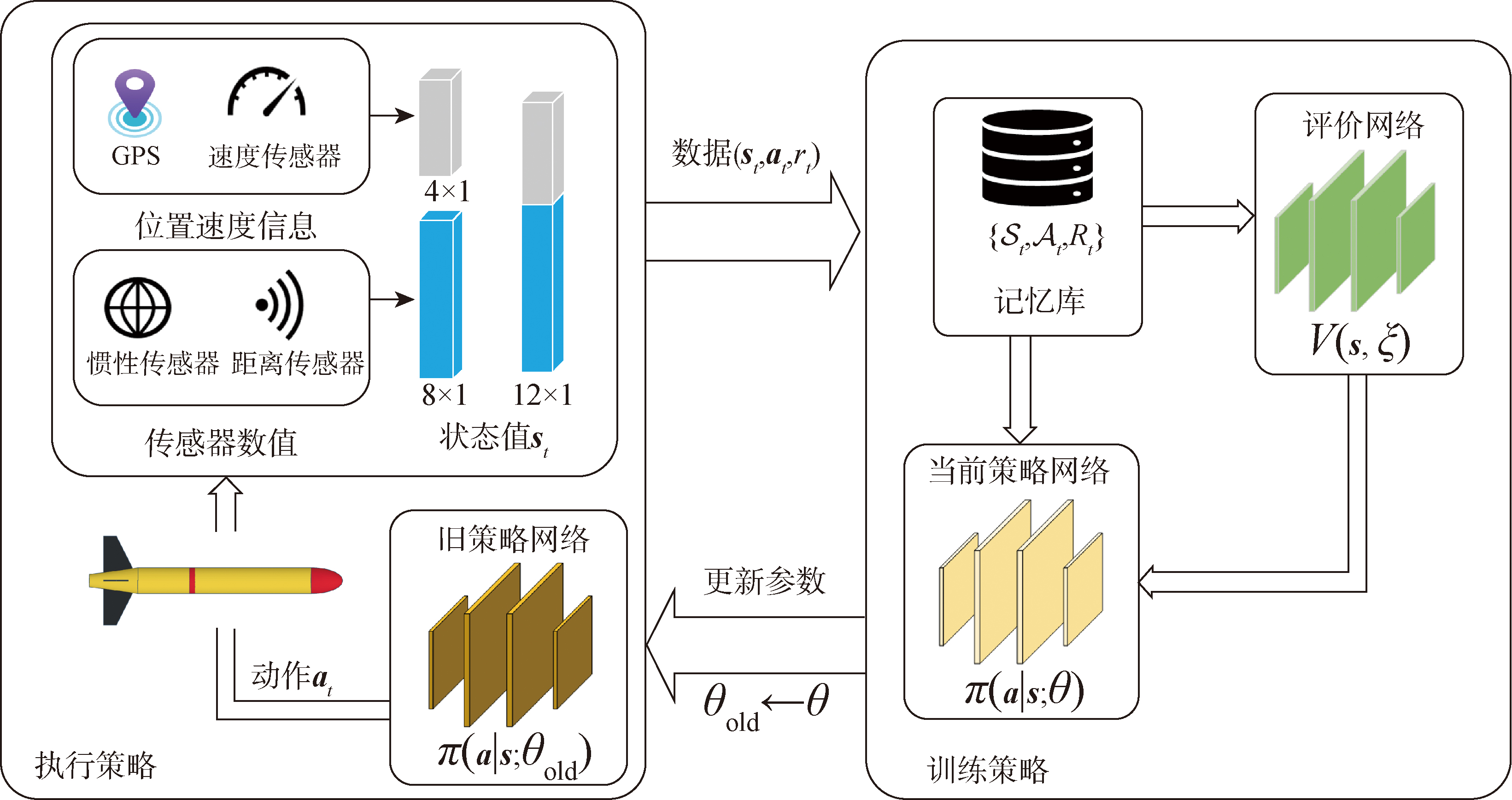
Fig.4 The framework of the proposed algorithm
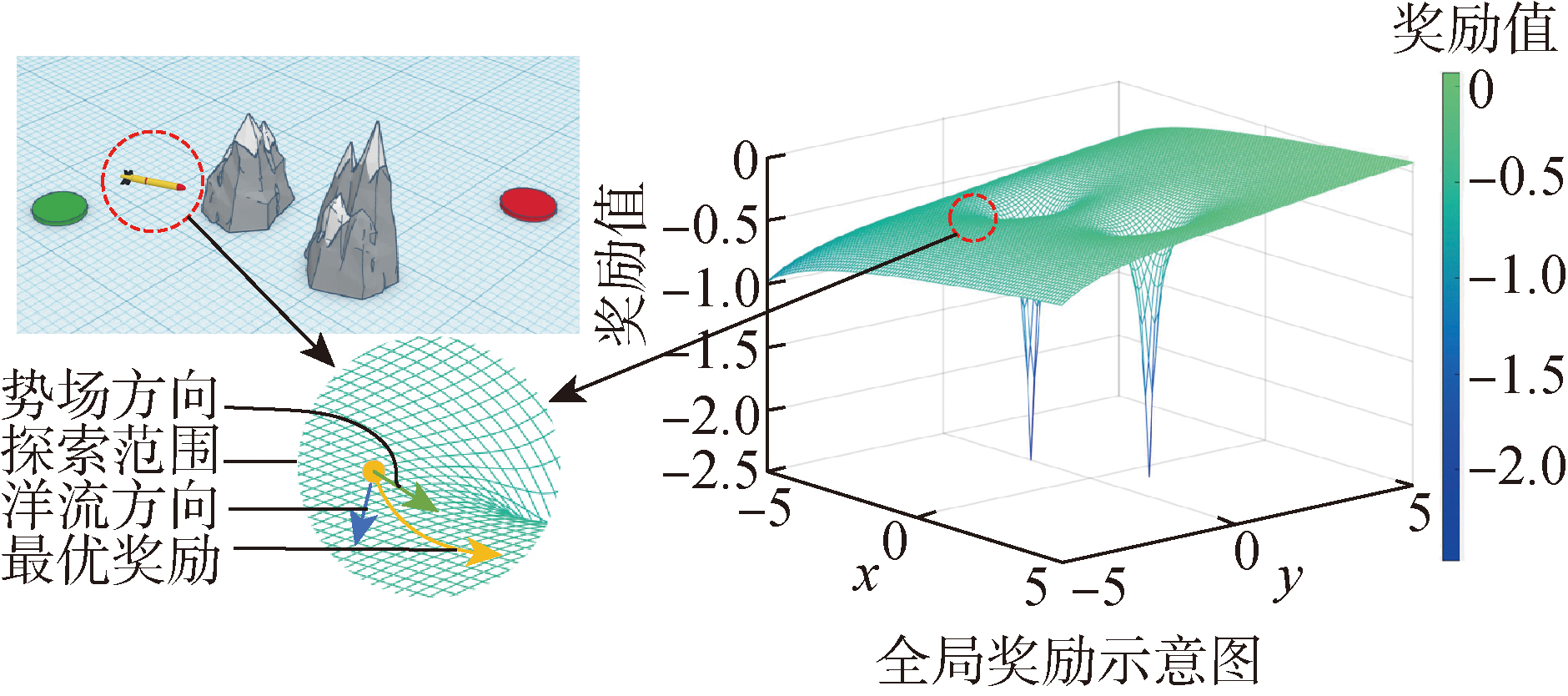
Fig.5 APF reward

Fig.6 Underwater mission scene
| AUV参数 | 数值 | 水下场景 | 数值 |
|---|---|---|---|
| 长度/m | 1.5 | 范围/m | 100×100 |
| 直径/m | 0.2 | 水密度/(kg·m-3) | 1000 |
| 速度/(m·s-1) | 2 | 水黏度/(Pa·s) | 0.001 |
| 质量/kg | 40 | 水流速/(m·s-1) | 0~0.5 |
Table 1 AUV simulation parameters
| AUV参数 | 数值 | 水下场景 | 数值 |
|---|---|---|---|
| 长度/m | 1.5 | 范围/m | 100×100 |
| 直径/m | 0.2 | 水密度/(kg·m-3) | 1000 |
| 速度/(m·s-1) | 2 | 水黏度/(Pa·s) | 0.001 |
| 质量/kg | 40 | 水流速/(m·s-1) | 0~0.5 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| ka | 5 | 激活函数 | ReLu |
| kr | 15 | 衰减因子 | 0.99 |
| 积极经验提取系数 | 0.01 | 经验库尺寸 | 1×104 |
| 状态个数 | 12 | 小批量尺寸 | 256 |
| 动作个数 | 6 | 批训练轮数 | 10 |
| ηa | 3×10-4 | 梯度截断 | 0.5 |
| ηc | 3×10-4 | 回合最大步数 | 1×105 |
| 隐藏层数 | 2 | 经验回放常数 | 0.95 |
Table 2 Algorithm parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| ka | 5 | 激活函数 | ReLu |
| kr | 15 | 衰减因子 | 0.99 |
| 积极经验提取系数 | 0.01 | 经验库尺寸 | 1×104 |
| 状态个数 | 12 | 小批量尺寸 | 256 |
| 动作个数 | 6 | 批训练轮数 | 10 |
| ηa | 3×10-4 | 梯度截断 | 0.5 |
| ηc | 3×10-4 | 回合最大步数 | 1×105 |
| 隐藏层数 | 2 | 经验回放常数 | 0.95 |

Fig.7 Training framework of PR-PPO algorithm

Fig.8 Result of training process
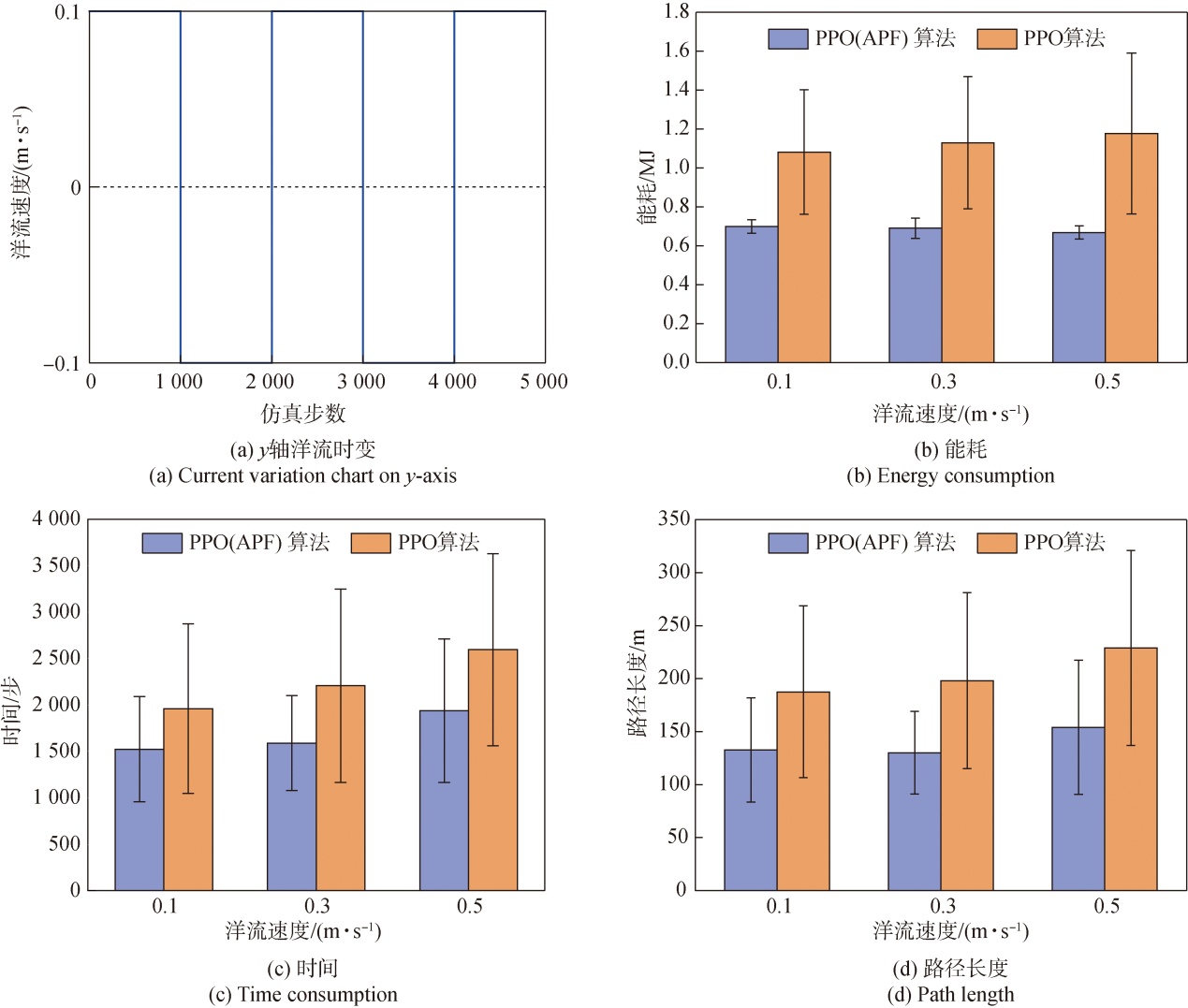
Fig.9 Effect of the algorithm under time-varying ocean currents
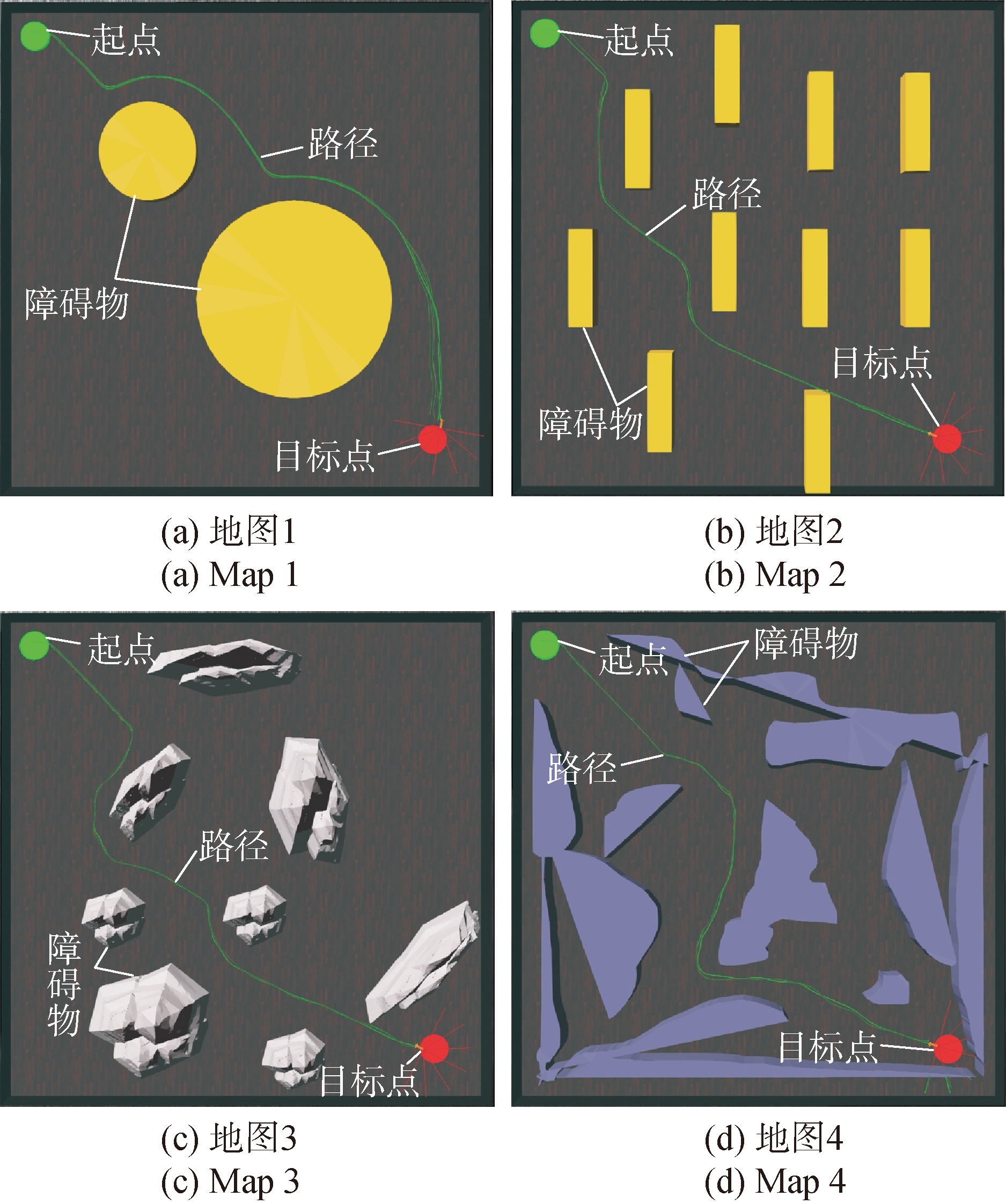
Fig.10 Simulation map
| 场景 | 平均奖励 | 平均步数 | 平均路径长度/m | 成功率/% |
|---|---|---|---|---|
| 地图1 | -110 | 995 | 124 | 99 |
| 地图2 | -261 | 1403 | 141 | 95 |
| 地图3 | -100 | 1437 | 127 | 96 |
| 地图4 | -242 | 1340 | 141 | 96 |
Table 3 Algorithm validation
| 场景 | 平均奖励 | 平均步数 | 平均路径长度/m | 成功率/% |
|---|---|---|---|---|
| 地图1 | -110 | 995 | 124 | 99 |
| 地图2 | -261 | 1403 | 141 | 95 |
| 地图3 | -100 | 1437 | 127 | 96 |
| 地图4 | -242 | 1340 | 141 | 96 |
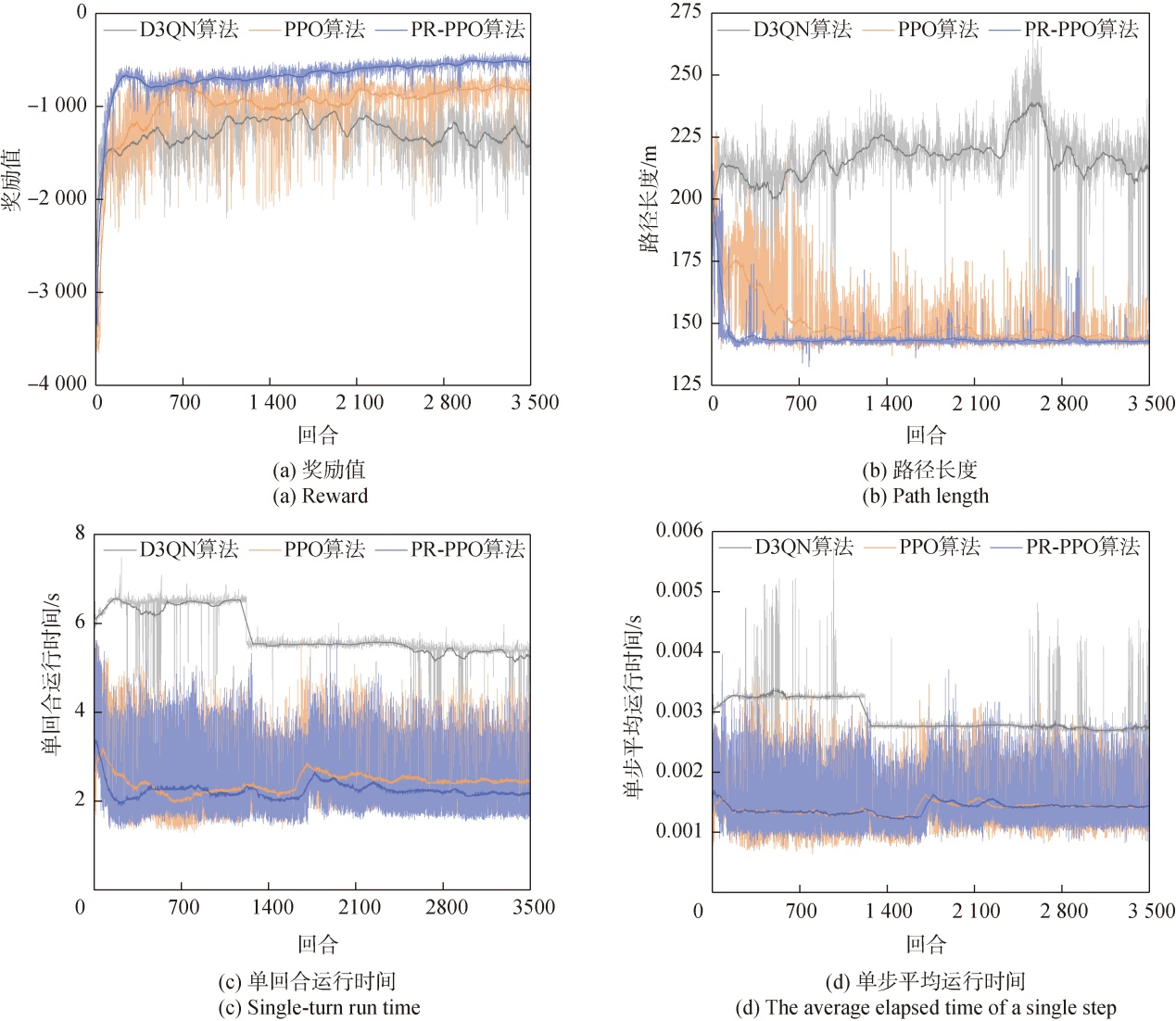
Fig.11 Training results
| 算法 | 奖励值 | 步数 | 路径长度/m |
|---|---|---|---|
| D3QN算法 | -1371±302 | 1900±148 | 207±25 |
| PPO算法 | -821±140 | 1731±116 | 144±5 |
| PR-PPO算法 | -513±52 | 1519±71 | 142±0.5 |
Table 4 Robustness contrast
| 算法 | 奖励值 | 步数 | 路径长度/m |
|---|---|---|---|
| D3QN算法 | -1371±302 | 1900±148 | 207±25 |
| PPO算法 | -821±140 | 1731±116 | 144±5 |
| PR-PPO算法 | -513±52 | 1519±71 | 142±0.5 |
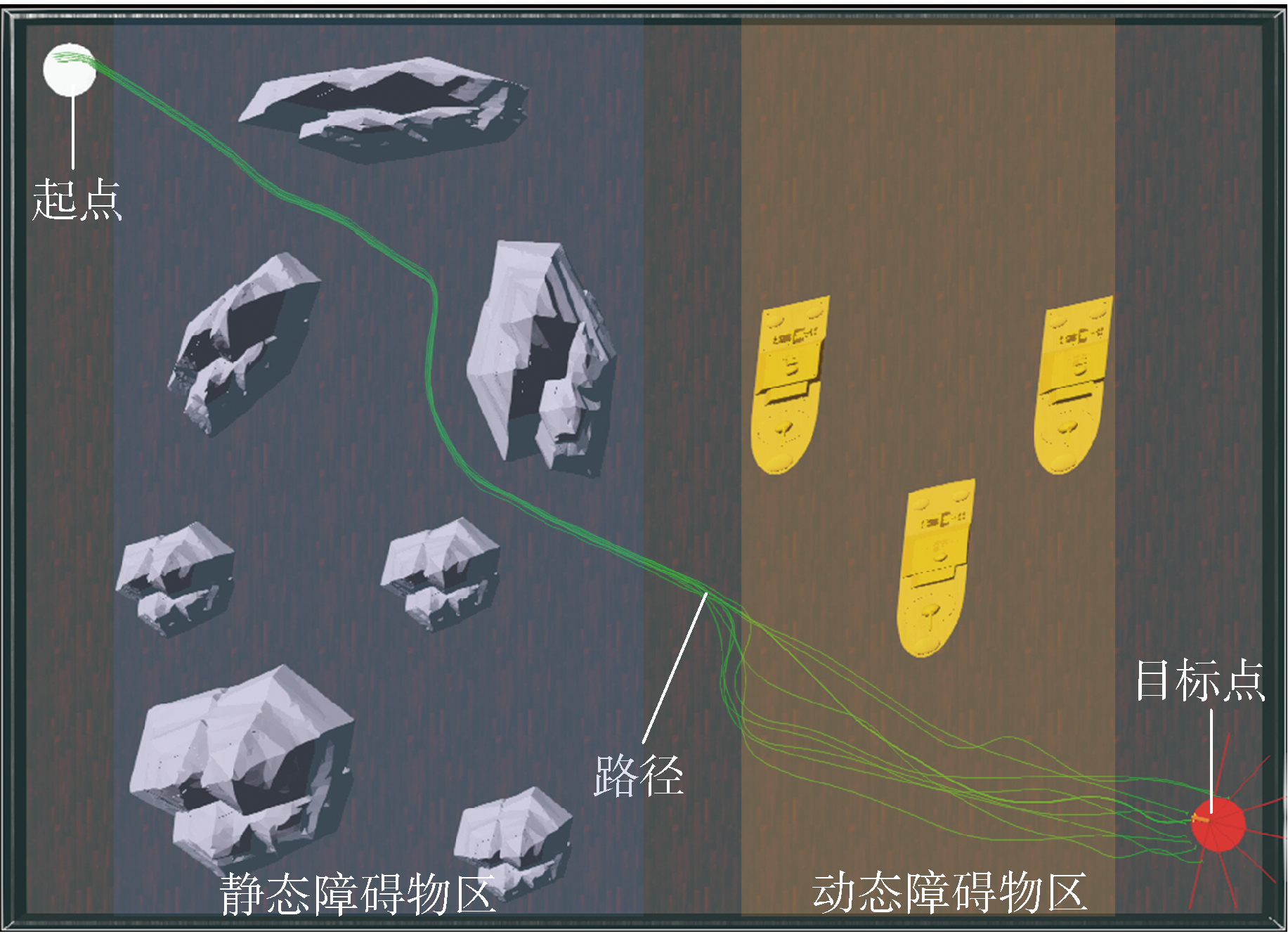
Fig.12 Dynamic environment obstacle avoidance and path planning
| [1] |
王圣洁, 康凤举, 韩翃. 潜艇与智能无人水下航行器协同系统控制体系及决策研究[J]. 兵工学报, 2017, 38(2):335-344.
doi: 10.3969/j.issn.1000-1093.2017.02.018 |
|
|
|
| [2] |
丁文俊, 张国宗, 刘海旻, 等. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1):184-196.
doi: 10.12382/bgxb.2023.0417 |
|
doi: 10.12382/bgxb.2023.0417 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
杨静, 吴金平, 刘剑, 等. 一种半监督学习潜艇规避防御智能决策方法[J]. 兵工学报, 2024, 45(10):3474-3487.
doi: 10.12382/bgxb.2023.0684 |
|
doi: 10.12382/bgxb.2023.0684 |
|
| [10] |
|
| [11] |
|
| [12] |
闫皎洁, 张锲石, 胡希平. 基于强化学习的路径规划技术综述[J]. 计算机工程, 2021, 47(10):16-25.
doi: 10.19678/j.issn.1000-3428.0060683 |
|
doi: 10.19678/j.issn.1000-3428.0060683 |
|
| [13] |
|
| [14] |
王思鹏, 杜昌平, 郑耀. 基于强化学习的扑翼飞行器路径规划算法[J]. 控制与决策, 2022, 37(4):851-860.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
武建国, 石凯, 刘健, 等. 6000m AUV“潜龙一号”浮力调节系统开发及试验研究[J]. 海洋技术学报, 2014, 33(5):1-7.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 镇江: 江苏大学, 2017.
|
|
|
|
| [21] |
翟丽, 张雪莹, 张闲, 等. 基于势场法的无人车局部动态避障路径规划算法[J]. 北京理工大学学报, 2022, 42(7):696-705.
|
|
|
| [1] | XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240435-. |
| [2] | WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction [J]. Acta Armamentarii, 2025, 46(4): 240410-. |
| [3] | LI Yaxuan, LIU Xinfu. Real-time Trajectory Planning for Fixed-wing UAVs Based on Exact Convex Relaxation [J]. Acta Armamentarii, 2025, 46(3): 240362-. |
| [4] | LI Chuanhao, MING Zhenjun, WANG Guoxin, YAN Yan, DING Wei, WAN Silai, DING Tao. Dynamic Decision-making Method of Unmanned Platform Chaff Jamming for Terminal Defense Based on Multi-agent Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(3): 240251-. |
| [5] | ZHANG Wang, SHAO Xuehui, TANG Huilong, WEI Jianlin, WANG Wei. A Reinforcement Learning-based Radar Jamming Decision-making Method with Adaptive Setting of Exploration Rate [J]. Acta Armamentarii, 2025, 46(3): 240357-. |
| [6] | XIAO Liujun, LI Yaxuan, LIU Xinfu. Adaptive Terminal Guidance for Hypersonic Gliding Vehicles Using Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(2): 240222-. |
| [7] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| [8] | LI Shiying, DING Yinghe, SUN Haiwen, XU Zheng, LI Ye, TANG Enbo. Consensus Model and Collaborative Control Method of Large-scale Unmanned Cluster [J]. Acta Armamentarii, 2024, 45(S2): 113-122. |
| [9] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [10] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [11] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [12] | NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3204-3215. |
| [13] | CHEN Wenjie, CUI Xiaohong, WANG Binrui. Safety Optimal Tracking Control Algorithm and Robot Arm Simulation [J]. Acta Armamentarii, 2024, 45(8): 2688-2697. |
| [14] | ZHOU Guohua, LI Linfeng, WU Kena, LIU Yuelin, XIA Shuai. Numerical Simulation of Magnetic Interference Parameter Identification of AUV Based on L-SHADE Agorithm [J]. Acta Armamentarii, 2024, 45(8): 2678-2687. |
| [15] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||