
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (7): 2097-2109.doi: 10.12382/bgxb.2023.0305
Previous Articles Next Articles
JI Peng*( ), GUO Minghao
), GUO Minghao
Received:2023-04-04
Online:2023-08-03
Contact:
JI Peng
CLC Number:
JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System[J]. Acta Armamentarii, 2024, 45(7): 2097-2109.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Establishment of Frenet coordinate system

Fig.2 Description of path diagram in Cartesian coordinate system(Left:the depiction of vehicle trajectory on the roadway; Right:the actual mapping of vehicle trajectory in Cartesian coordinate system)

Fig.3 Description of path diagram in Frenet coordinate system(Left: the depiction of vehicle trajectory on the roadway; Right: the actual mapping of vehicle trajectory in Frenet coordinate system)

Fig.4 Trajectory generation in Frenet coordinate system
| 参数 | 含义 |
|---|---|
| rh/m | 车辆的位置矢量 |
| vh/(m·s-1) | 车辆的速度矢量 |
| ah/(m·s-2) | 车辆的加速度矢量 |
| kh/m-1 | 车的位置在车轨迹上的曲率 |
| τh | 车轨迹切线上的单位向量 |
| nh | 车轨迹法线上的单位向量 |
Table 1 The parameters and meanings of Cartesian coordinate system
| 参数 | 含义 |
|---|---|
| rh/m | 车辆的位置矢量 |
| vh/(m·s-1) | 车辆的速度矢量 |
| ah/(m·s-2) | 车辆的加速度矢量 |
| kh/m-1 | 车的位置在车轨迹上的曲率 |
| τh | 车轨迹切线上的单位向量 |
| nh | 车轨迹法线上的单位向量 |
| 参数 | 含义 |
|---|---|
| rr/m | 车辆投影的位置矢量 |
| /(m·s-1) | 纵向速度 |
| /(m·s-2) | 纵向加速度 |
| kr/m-1 | 投影的位置矢量在道路几何上的曲率 |
| /(m·s-1) | 横向速度 |
| /(m·s-2) | 横向加速度 |
| τr | 投影在道路几何上切线的单位向量 |
| nr | 投影在道路几何上法线的单位向量 |
| l' | 横向位移对弧长的1阶导数 |
| l″ | 横向位移对弧长的2阶导数 |
Table 2 The parameters and meanings of Frenet coordinate system
| 参数 | 含义 |
|---|---|
| rr/m | 车辆投影的位置矢量 |
| /(m·s-1) | 纵向速度 |
| /(m·s-2) | 纵向加速度 |
| kr/m-1 | 投影的位置矢量在道路几何上的曲率 |
| /(m·s-1) | 横向速度 |
| /(m·s-2) | 横向加速度 |
| τr | 投影在道路几何上切线的单位向量 |
| nr | 投影在道路几何上法线的单位向量 |
| l' | 横向位移对弧长的1阶导数 |
| l″ | 横向位移对弧长的2阶导数 |

Fig.5 Potential field diagram of artificial potential field method

Fig.6 Vehicle obstacle avoidance sketch

Fig.7 Safe elliptic graph

Fig.8 Addressing the middle equilibrium point

Fig.9 Solving the problem of long paths

Fig.10 Solving the problem of unreachable targets

Fig.11 Flow chart of prediction distance algorithm
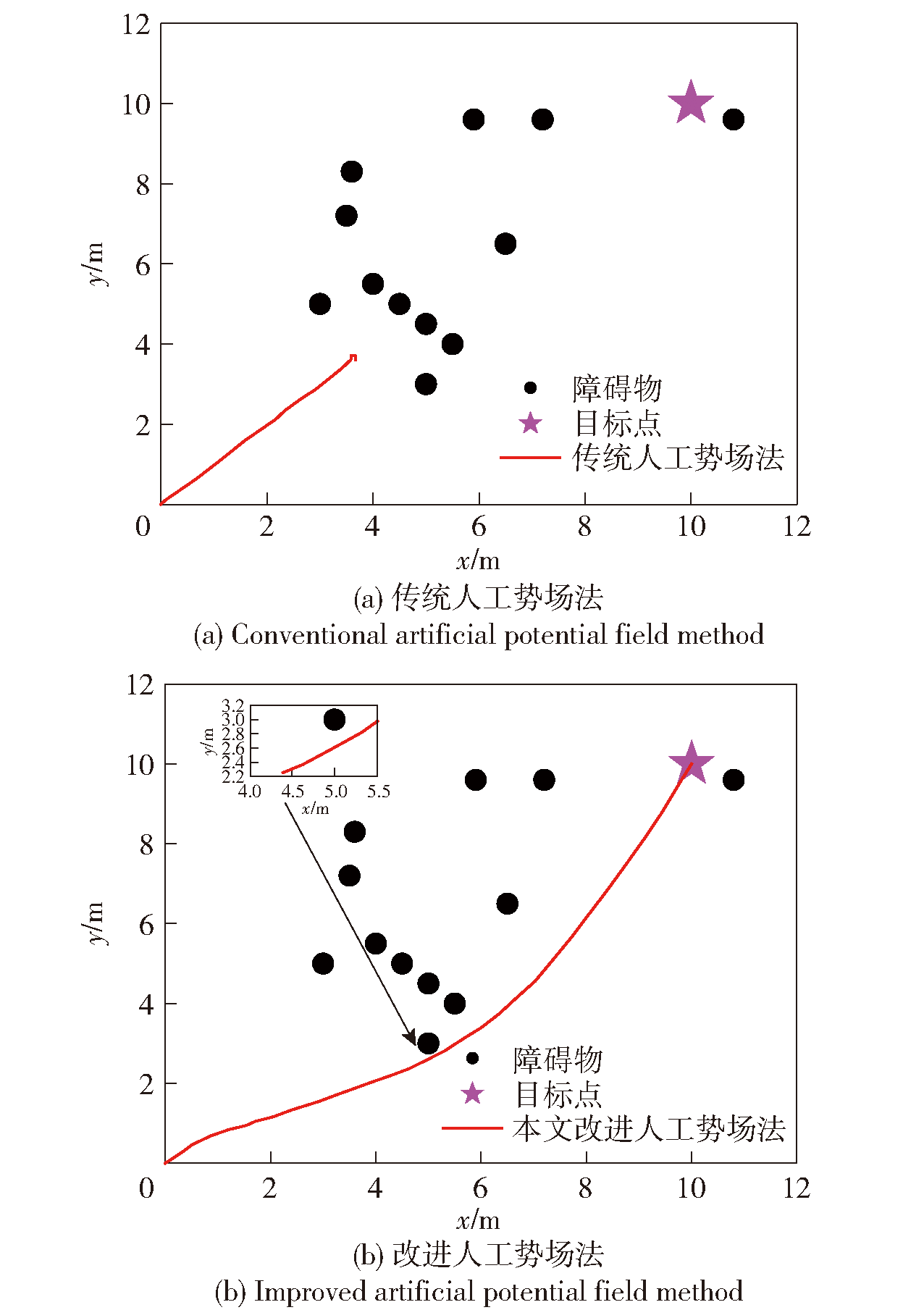
Fig.12 Solving the problem of U-shaped obstacles

Fig.13 Comparison of the proposed algorithm and the algorithm in Ref.[6]
| 参数 | 传统人工 势场法 | 文献[ | 本文改进 人工势场法 |
|---|---|---|---|
| 步数 | - | 71 | 62 |
| 路径长/m | - | 7.1 | 5.6 |
| 时间/s | - | 0.1114 | 0.036 |
Table 3 Comparison of U-shaped obstacle algorithms
| 参数 | 传统人工 势场法 | 文献[ | 本文改进 人工势场法 |
|---|---|---|---|
| 步数 | - | 71 | 62 |
| 路径长/m | - | 7.1 | 5.6 |
| 时间/s | - | 0.1114 | 0.036 |

Fig.14 Vehicle speed diagram

Fig.15 Schematic diagram of avoiding dynamic obstacles

Fig.16 Path planning effects of different methods
| 算法 | 仿真时间/s | 仿真步长 | 路径长度/m |
|---|---|---|---|
| RRT算法 | 0.92 | 0.5 | 1652 |
| 传统人工势场法 | 0.40 | 0.5 | |
| 改进人工势场法 | 0.47 | 0.5 | 1476 |
Table 4 Comparison of algorithm simulation data
| 算法 | 仿真时间/s | 仿真步长 | 路径长度/m |
|---|---|---|---|
| RRT算法 | 0.92 | 0.5 | 1652 |
| 传统人工势场法 | 0.40 | 0.5 | |
| 改进人工势场法 | 0.47 | 0.5 | 1476 |

Fig.17 Schematic diagram of automatic driving system

Fig.18 Moving trajectory during static obstacle avoidance(Left:preparing for obstacle avoidance; Middle:avoiding obstacles; Right:obstacle avoidance completed)

Fig.19 Simulation path tracking effect

Fig.20 Moving trajectory during dynamic obstacle avoidance(Left:preparing for obstacle avoidance; Middle:Avoiding obstacles; Right:obstacle avoidance completed)

Fig.21 Joint simulation path tracking effect

Fig.22 Simulation process of avoiding U-shaped obstacles (Left:preparing for obstacle avoidance;Middle:avoiding obstacles; Right:obstacle avoidance completed)

Fig.23 Simulation process of avoiding dynamic obstacles (Left:preparing for obstacle avoidance;Middle:avoiding obstacles; Right:obstacle avoidance completed)

Fig.24 Simulation process of avoiding dynamic obstacles under large curvature(Left:preparing for obstacle avoidance; Middle:avoiding obstacles; Right:obstacle avoidance completed)

Fig.25 Avoid dynamic obstacle path tracking effect
| [1] |
翟丽, 张雪莹, 张闲, 等. 基于势场法的无人车局部动态避障路径规划算法[J]. 北京理工大学学报, 2022, 42(7):696-705.
|
|
|
|
| [2] |
牛秦玉, 李美凡, 赵勇. 改进人工势场法的AGV路径规划算法研究[J]. 机床与液压, 2022, 50(17):19-24.
doi: 10.3969/j.issn.1001-3881.2022.17.004 |
|
|
|
| [3] |
|
| [4] |
修彩靖, 陈慧. 基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J]. 汽车工程, 2013, 35(9):808-811.
|
|
|
|
| [5] |
陈相茹. 基于人工势场理论的车辆行驶路径建模研究[D]. 长春: 吉林大学, 2020.
|
|
|
|
| [6] |
李二超, 王玉华. 改进人工势场法的移动机器人避障轨迹研究[J]. 计算机工程与应用, 2022, 58(6):296-304.
doi: 10.3778/j.issn.1002-8331.2108-0122 |
|
|
|
| [7] |
孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10):2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
|
|
| [8] |
|
| [9] |
王沙晶, 陈建业. 基于Frenet坐标系的智能车运动规划研究[J]. 移动电源与车辆, 2019, 195(1):22-29.
|
|
|
|
| [10] |
魏民祥, 滕德成, 吴树凡. 基于Frenet坐标系的自动驾驶轨迹规划与优化算法[J]. 控制与决策, 2021, 36(4):815-824.
|
|
|
|
| [11] |
刘冰雁, 叶雄兵, 方胜良, 等. 基于Frenet和改进人工势场的在轨规避路径自主规划[J]. 北京航空航天大学学报, 2021, 47(4):731-741.
|
|
|
|
| [12] |
王威, 陈慧岩, 马建昊, 等. 基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪[J]. 兵工学报, 2019, 40(11):2336-2351.
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
| [13] |
袁春, 龚城, 何成诚, 等. Frenet坐标系及凸近似避障原理的无人车局部路径规划[J]. 重庆理工大学学报(自然科学), 2022, 36(4):59-67.
|
|
|
|
| [14] |
李萌. 基于Frenet坐标系的智能车辆多场景轨迹规划研究[D]. 哈尔滨: 哈尔滨工业大学, 2021.
|
|
|
|
| [15] |
|
| [16] |
陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3):651-658.
doi: 10.3969/j.issn.1000-1093.2019.03.025 |
|
|
|
| [17] |
韩宇洪. 基于改进人工势场法的无人车避障路径规划研究[D]. 重庆: 重庆理工大学, 2020.
|
|
|
|
| [18] |
朱伟达. 基于改进型人工势场法的车辆避障路径规划研究[D]. 镇江: 江苏大学, 2017.
|
|
|
|
| [19] |
范世鹏, 祁琪, 路坤锋, 等. 基于改进人工势场法的巡航导弹自主避障技术[J]. 北京理工大学学报, 2018, 38(8):828-834.
|
|
|
|
| [20] |
|
| [1] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [2] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [3] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [4] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [5] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [6] | GUAN Haijie, WANG Boyang, WANG Xurui, LIU Hai’ou, CHEN Huiyan. A Review on the Development of Military Unmanned Ground System with Mission Payload [J]. Acta Armamentarii, 2023, 44(11): 3333-3344. |
| [7] | SUN Yang, CHEN Hui-yan. Research on Test and Evaluation of Unmanned Ground Vehicles [J]. Acta Armamentarii, 2015, 36(6): 978-986. |
| [8] | CHEN Hui-yan, ZHANG Yu. An Overview of Research on Military Unmanned Ground Vehicles [J]. Acta Armamentarii, 2014, 35(10): 1696-1706. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||