
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (2): 240265-.doi: 10.12382/bgxb.2024.0265
Previous Articles Next Articles
LI Zonggang1,2,*( ), HAN Sen1,2, CHEN Yinjuan1,2, NING Xiaogang1,2
), HAN Sen1,2, CHEN Yinjuan1,2, NING Xiaogang1,2
Received:2024-04-09
Online:2025-02-28
Contact:
LI Zonggang
CLC Number:
LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network[J]. Acta Armamentarii, 2025, 46(2): 240265-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 MRC-OPP model and transform map

Fig.2 Schematic diagram of IIFT model
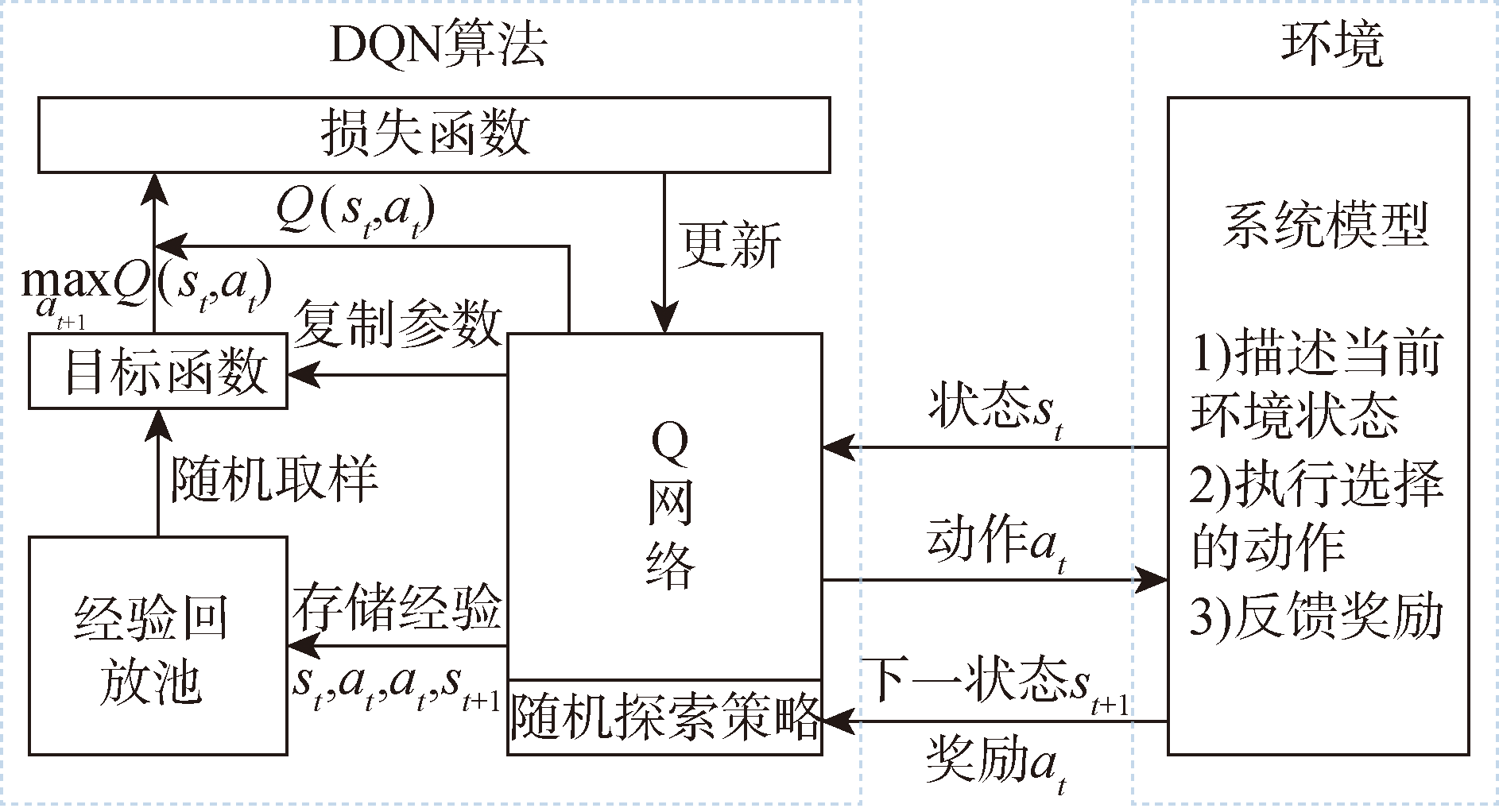
Fig.3 Schematic diagram of DQN algorithm structure

Fig.4 Positional relationship and search area diagram

Fig.5 Improved search domain

Fig.6 Observation space formed by four numerical matrices

Fig.7 Optional grid points for mobile robot

Fig.8 Neural network structure diagram
| Algorithm 1 AS-DQN: |
|---|
| Initialization Initialize replay memory,Initialize the Q network and target network and other hyperparameters.Initialize S=0. |
| 1: for S<Smax do |
| 2: if S≠0 then sk=sk+1 |
| 3: else get the initial observation sk |
| 4: end if |
| 5: if S<pre.step then |
| 6: random select action ak |
| 7: else |
| 8: if μ<$ \epsilon $ then random select action ak |
| 9: else select ak= Q(sk,a,θ) |
| 10: end if |
| 11: end if |
| 12: if coordinate.ak=FALSE |
| 13: brake |
| 14: Store experience ek=(sk,ak,rk,sk+1) |
| 15: if S<decline.step then |
| 16: $ \epsilon = \epsilon +0.002$ |
| 17: end if |
| 18: if S>pre.step then |
| 19: Calculate the loss (y-Q(si,ai;θi))2 |
| 20: Train and update Q network’s weight θi |
| 21: Every Z steps copy θi to θi+1 |
| 22: end if |
| 23: end for |
Table 1 AS-DQN pseudocode
| Algorithm 1 AS-DQN: |
|---|
| Initialization Initialize replay memory,Initialize the Q network and target network and other hyperparameters.Initialize S=0. |
| 1: for S<Smax do |
| 2: if S≠0 then sk=sk+1 |
| 3: else get the initial observation sk |
| 4: end if |
| 5: if S<pre.step then |
| 6: random select action ak |
| 7: else |
| 8: if μ<$ \epsilon $ then random select action ak |
| 9: else select ak= Q(sk,a,θ) |
| 10: end if |
| 11: end if |
| 12: if coordinate.ak=FALSE |
| 13: brake |
| 14: Store experience ek=(sk,ak,rk,sk+1) |
| 15: if S<decline.step then |
| 16: $ \epsilon = \epsilon +0.002$ |
| 17: end if |
| 18: if S>pre.step then |
| 19: Calculate the loss (y-Q(si,ai;θi))2 |
| 20: Train and update Q network’s weight θi |
| 21: Every Z steps copy θi to θi+1 |
| 22: end if |
| 23: end for |

Fig.9 AS-DQN training structure diagram
| 参数名称 | 数值 |
|---|---|
| 记忆池 | 20000 |
| 开始训练的经验数量 | 100 |
| 处理样本数量 | 32 |
| 目标网络更新频率 | 100 |
| 折扣因子γ | 0.9 |
| 学习率 | 0.001 |
| 经验回放内存值 | 500 |
| 选择最大Q值动作的概率ε | 0.01 |
| ε最大值 | 1 |
| ε增加速率 | 0.002 |
Table 2 Hyperparameters and numerical values of neural network
| 参数名称 | 数值 |
|---|---|
| 记忆池 | 20000 |
| 开始训练的经验数量 | 100 |
| 处理样本数量 | 32 |
| 目标网络更新频率 | 100 |
| 折扣因子γ | 0.9 |
| 学习率 | 0.001 |
| 经验回放内存值 | 500 |
| 选择最大Q值动作的概率ε | 0.01 |
| ε最大值 | 1 |
| ε增加速率 | 0.002 |

Fig.10 Schematic diagram of map obstacles model

Fig.11 Schematic diagram of changes in loss values during training

Fig.12 Schematic diagram of path planning of 8×8 map

Fig.13 Schematic diagram of path planning of 12×12 map

Fig.14 Schematic diagram of changes in loss values of 8×8 map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R1 | 28000 | 372.9 |
| R2 | 30000 | 446.5 |
| R3 | 17000 | 258.6 |
Table 3 Mobile robot data of 8×8map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R1 | 28000 | 372.9 |
| R2 | 30000 | 446.5 |
| R3 | 17000 | 258.6 |

Fig.15 Schematic diagram of changes in loss values of 12×12map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R4 | 109000 | 1510.6 |
| R5 | 103000 | 1429.8 |
| R6 | 75000 | 1137.2 |
Table 4 Mobile robot data of 12×12map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R4 | 109000 | 1510.6 |
| R5 | 103000 | 1429.8 |
| R6 | 75000 | 1137.2 |

Fig.16 Diagram of changes in loss values during training
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 27000 | 368.5 | 20.68 |
| AS-DQN | 20500 | 292.3 |
Table 5 Model data of static obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 27000 | 368.5 | 20.68 |
| AS-DQN | 20500 | 292.3 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | 23.99 |
| AS-DQN | 20000 | 302.6 |
Table 6 Model data of dynamic obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | 23.99 |
| AS-DQN | 20000 | 302.6 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | 15.75 |
| AS-DQN | 75000 | 1025.3 |
Table 7 Model data of static obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | 15.75 |
| AS-DQN | 75000 | 1025.3 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | 16.54 |
| AS-DQN | 85500 | 1260.7 |
Table 8 Model data of dynamic obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | 16.54 |
| AS-DQN | 85500 | 1260.7 |

Fig.17 Schematic diagram of changes in loss values during training
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% | |||
|---|---|---|---|---|---|---|
| DQN | 27000 | 368.5 | ||||
| AS-DQN | 20500 | 292.3 | 53.92 | |||
| AS-DQN(IIFT) | 12000 | 169.8 | 41.91 | |||
Table 9 Model data of static obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% | |||
|---|---|---|---|---|---|---|
| DQN | 27000 | 368.5 | ||||
| AS-DQN | 20500 | 292.3 | 53.92 | |||
| AS-DQN(IIFT) | 12000 | 169.8 | 41.91 | |||
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | |
| AS-DQN | 20000 | 302.6 | 52.65 |
| AS-DQN(IIFT) | 12500 | 188.5 | 37.71 |
Table 10 Model data of dynamic obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | |
| AS-DQN | 20000 | 302.6 | 52.65 |
| AS-DQN(IIFT) | 12500 | 188.5 | 37.71 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | |
| AS-DQN | 75000 | 1025.3 | 40.33 |
| AS-DQN(IIFT) | 56000 | 726.1 | 29.18 |
Table 11 Model data of static obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | |
| AS-DQN | 75000 | 1025.3 | 40.33 |
| AS-DQN(IIFT) | 56000 | 726.1 | 29.18 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | |
| AS-DQN | 85500 | 1260.7 | 35.54 |
| AS-DQN(IIFT) | 65000 | 973.8 | 22.76 |
Table 12 Model data of dynamic obstacle of 12×12 map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | |
| AS-DQN | 85500 | 1260.7 | 35.54 |
| AS-DQN(IIFT) | 65000 | 973.8 | 22.76 |

Fig.18 Physical images

Fig.19 Schematic diagram of rigid body and NOKOV dynamic capture system

Fig.20 Schematic diagram of TB3 unmanned vehicle path planning process

Fig.21 Path planning of TB3 on Rviz
| [1] |
王旭, 朱其新, 朱永红, 等. 面向二维移动机器人的路径规划算法综述[J]. 计算机工程与应用, 2023, 59(20):51-66.
doi: 10.3778/j.issn.1002-8331.2212-0050 |
|
doi: 10.3778/j.issn.1002-8331.2212-0050 |
|
| [2] |
毛建旭, 贺振宇. 电力巡检机器人路径规划技术及应用综述[J]. 控制与决策, 2023, 38(11):3009-3024.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
郭利进, 李强. 基于改进RRT*算法的移动机器人路径规划[J]. 智能系统学报, 2024, 19(05):1209-1217.
|
|
|
|
| [12] |
|
| [13] |
梅艺林, 崔立堃, 胡雪岩. 基于人工势场法的无人车路径规划与避障研究[J]. 兵器装备工程学报, 2024, 45(09):300-306.
|
|
|
|
| [14] |
吴妮妮, 王岫鑫. 移动机器人导航路径的自主学习粒子群规划方法[J]. 机械设计与制造, 2024(7):342-346.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1109/ACCESS.2019.2918703 |
| [22] |
|
| [23] |
|
| [24] |
史殿习, 彭滢璇, 杨焕焕, 等. 基于DQN的多智能体深度强化学习运动规划方法[J]. 计算机科学, 2024, 51(2):268-277.
|
|
doi: 10.11896/jsjkx.230500113 |
|
| [25] |
|
| [26] |
|
| [27] |
王雅如, 姚得鑫, 刘增力, 等. 基于角度搜索的移动机器人路径规划方法[J]. 系统仿真学报, 2024, 36(7):1643-1654.
doi: 10.16182/j.issn1004731x.joss.23-0407 |
|
doi: 10.16182/j.issn1004731x.joss.23-0407 |
|
| [28] |
|
| [1] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [2] | NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3204-3215. |
| [3] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [4] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [5] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [6] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [7] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [8] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [9] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [10] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [11] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [12] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [13] | SU Bo, JIANG Lei, LIU Yufei, XING Boyang, LI Yongyao, TAN Senqi, WANG Zhirui. A Review of Key Technologies for Cross-domain and Trans-medium of Mobile Robotics [J]. Acta Armamentarii, 2023, 44(9): 2556-2567. |
| [14] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [15] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||