
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240251-.doi: 10.12382/bgxb.2024.0251
Previous Articles Next Articles
LI Chuanhao1, MING Zhenjun1,2,*( ), WANG Guoxin1,2, YAN Yan1,2, DING Wei1, WAN Silai1, DING Tao1,3
), WANG Guoxin1,2, YAN Yan1,2, DING Wei1, WAN Silai1, DING Tao1,3
Received:2024-04-07
Online:2025-03-26
Contact:
MING Zhenjun
LI Chuanhao, MING Zhenjun, WANG Guoxin, YAN Yan, DING Wei, WAN Silai, DING Tao. Dynamic Decision-making Method of Unmanned Platform Chaff Jamming for Terminal Defense Based on Multi-agent Deep Reinforcement Learning[J]. Acta Armamentarii, 2025, 46(3): 240251-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Schematic diagram of multi-platform chaff terminal defense

Fig.2 Composition of multi-platform chaff terminal defense model

Fig.3 Relative motion relationship of missile and target
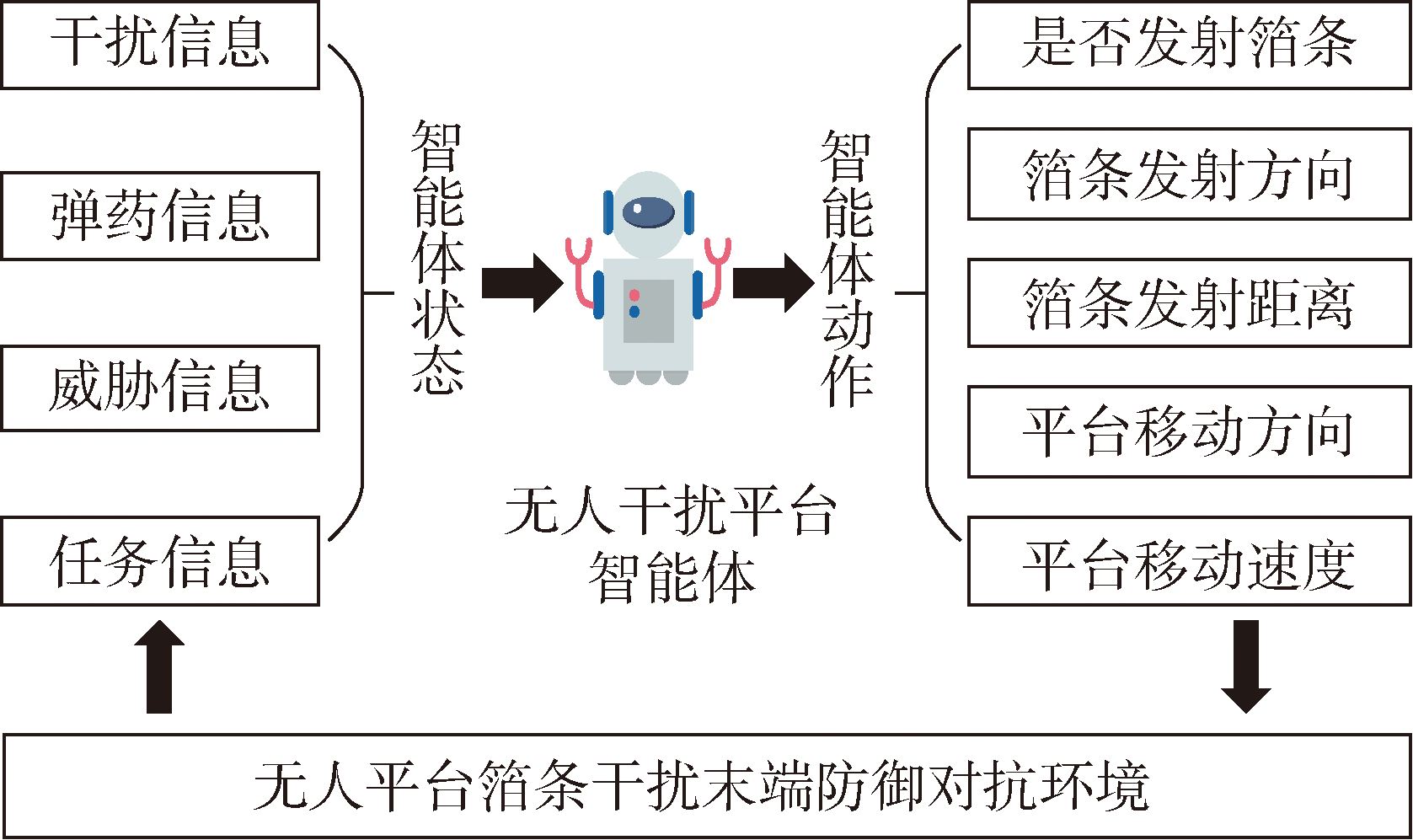
Fig.4 Operation flow of chaff jamming terminal defense agent
| 状态类型 | 状态名称 | 状态标识 | 维度 | 取值范围 | |
|---|---|---|---|---|---|
| 威胁信息 | 导弹位置坐标/m | Nmis×2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 导弹方向坐标/rad | Nmis | [-πrad,πrad) | |||
| 导弹机动速率/(m·s-1) | Nmis | [0, ] | |||
| 导弹跟踪时长/s | Nmis | [0,Tmax) | |||
| 弹药信息 | 箔条状态矩阵/m | ×3 | [Xmin,Xmax]×[Ymin,Ymax]×[0,k] | ||
| 箔条弹剩余数量 | Nplat | {0,1…, } | |||
| 无人干扰 平台信息 | 位置坐标/m | 2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 方向坐标/rad | 1 | [-πrad,πrad) | |||
| 速率值/(m·s-1) | 1 | [0, ] | |||
| 任务信息 | 资产位置/m | Nmis×2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 资产威胁距离/m | Nmis | [0, ] | |||
Table 1 Representation of jamming decision state space
| 状态类型 | 状态名称 | 状态标识 | 维度 | 取值范围 | |
|---|---|---|---|---|---|
| 威胁信息 | 导弹位置坐标/m | Nmis×2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 导弹方向坐标/rad | Nmis | [-πrad,πrad) | |||
| 导弹机动速率/(m·s-1) | Nmis | [0, ] | |||
| 导弹跟踪时长/s | Nmis | [0,Tmax) | |||
| 弹药信息 | 箔条状态矩阵/m | ×3 | [Xmin,Xmax]×[Ymin,Ymax]×[0,k] | ||
| 箔条弹剩余数量 | Nplat | {0,1…, } | |||
| 无人干扰 平台信息 | 位置坐标/m | 2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 方向坐标/rad | 1 | [-πrad,πrad) | |||
| 速率值/(m·s-1) | 1 | [0, ] | |||
| 任务信息 | 资产位置/m | Nmis×2 | [Xmin,Xmax]×[Ymin,Ymax] | ||
| 资产威胁距离/m | Nmis | [0, ] | |||
| 动作类型 | 动作名称 | 动作标识 | 取值范围 |
|---|---|---|---|
| 弹药动作 | 是否发射箔条 | {0,1} | |
| 箔条发射方向/rad | [-πrad,πrad) | ||
| 箔条发射距离/m | [0, ] | ||
| 无人干扰 平台信息 | 平台移动方向/rad | [-πrad,πrad) | |
| 平台移动速度/(m·s-1) | [0, ] |
Table 2 Representation of jamming decision action space
| 动作类型 | 动作名称 | 动作标识 | 取值范围 |
|---|---|---|---|
| 弹药动作 | 是否发射箔条 | {0,1} | |
| 箔条发射方向/rad | [-πrad,πrad) | ||
| 箔条发射距离/m | [0, ] | ||
| 无人干扰 平台信息 | 平台移动方向/rad | [-πrad,πrad) | |
| 平台移动速度/(m·s-1) | [0, ] |

Fig.5 MAPPO algorithm training framework
| 阵营 | 性能参数 | 标识 | 取值 |
|---|---|---|---|
| 蓝方 | 导弹近炸距离/m | Lfuse | 60 |
| 导弹比例导引系数 | K | 5 | |
| 导弹机动速率/(m·s-1) | vmis | 150 | |
| 导弹最大角速度/(rad·s-1) | π/6 | ||
| 资产雷达反射截面积/m2 | σa | 5000 | |
| 红方 | 资产引爆点安全距离/m | 60 | |
| 无人干扰平台最大速率/(m·s-1) | 20 | ||
| 无人干扰平台最大角速度/(rad·s-1) | π/3 | ||
| 无人干扰平台最大加速度/(m·s-2) | 5 | ||
| 箔条云持续时间/s | 2 | ||
| 箔条最大发射距离/m | 10 | ||
| 箔条武器装填量 | 5 | ||
| 箔条最大反射截面积/m2 | k | 1000 |
Table 3 Performance parameters of red and blue forces equipment
| 阵营 | 性能参数 | 标识 | 取值 |
|---|---|---|---|
| 蓝方 | 导弹近炸距离/m | Lfuse | 60 |
| 导弹比例导引系数 | K | 5 | |
| 导弹机动速率/(m·s-1) | vmis | 150 | |
| 导弹最大角速度/(rad·s-1) | π/6 | ||
| 资产雷达反射截面积/m2 | σa | 5000 | |
| 红方 | 资产引爆点安全距离/m | 60 | |
| 无人干扰平台最大速率/(m·s-1) | 20 | ||
| 无人干扰平台最大角速度/(rad·s-1) | π/3 | ||
| 无人干扰平台最大加速度/(m·s-2) | 5 | ||
| 箔条云持续时间/s | 2 | ||
| 箔条最大发射距离/m | 10 | ||
| 箔条武器装填量 | 5 | ||
| 箔条最大反射截面积/m2 | k | 1000 |
| 参数 | 标识 | 数值 |
|---|---|---|
| 策略网络学习率 | α | 5×10-4 |
| 价值网络学习率 | β | 5×10-4 |
| 最大迭代步数 | stepmax | 3×105 |
| 数据缓冲区容量 | B | 5 |
| 评估测试间隔 | Tite | 50 |
| 每轮最大步数 | Tmax | 30 |
| 连续更新次数 | K | 5 |
| 截断参数 | ε | 0.2 |
| 策略熵系数 | φ | 0.01 |
| 折扣因子 | γ | 0.999 |
| GAE参数 | λ | 0.95 |
| 策略/价值网络层数 | Nlayer | 4 |
| 隐藏层神经元个数 | Nhidden | 64 |
| 测试环境个数 | Nenv | 100 |
Table 4 Value of parameters in MAPPO algorithm
| 参数 | 标识 | 数值 |
|---|---|---|
| 策略网络学习率 | α | 5×10-4 |
| 价值网络学习率 | β | 5×10-4 |
| 最大迭代步数 | stepmax | 3×105 |
| 数据缓冲区容量 | B | 5 |
| 评估测试间隔 | Tite | 50 |
| 每轮最大步数 | Tmax | 30 |
| 连续更新次数 | K | 5 |
| 截断参数 | ε | 0.2 |
| 策略熵系数 | φ | 0.01 |
| 折扣因子 | γ | 0.999 |
| GAE参数 | λ | 0.95 |
| 策略/价值网络层数 | Nlayer | 4 |
| 隐藏层神经元个数 | Nhidden | 64 |
| 测试环境个数 | Nenv | 100 |
| 环境 序号 | 资产位置/m | 车辆方向/ rad | 导弹位置/m |
|---|---|---|---|
| 1 | |||
| 2 | |||
| ︙ | ︙ | ︙ | ︙ |
| 100 |
Table 5 Test environment parameters
| 环境 序号 | 资产位置/m | 车辆方向/ rad | 导弹位置/m |
|---|---|---|---|
| 1 | |||
| 2 | |||
| ︙ | ︙ | ︙ | ︙ |
| 100 |

Fig.6 Average cumulative reward value curve for each training cycle

Fig.7 Average protection success rate curve of each training cycle

Fig.8 The multi-agent terminal defense simulation process after training

Fig.9 The change in dfistance of asset from threat in a single simulation
| 算法 | 训练时长/s | 平均每轮决 策时长/s | 平均成功率 | 平均最小资产威胁距离/m | ||||
|---|---|---|---|---|---|---|---|---|
| 资产1 | 资产2 | 资产3 | 资产1 | 资产2 | 资产3 | |||
| MAPPO算法 | 2763.07 | 0.063277 | 0.75 | 0.85 | 0.77 | 85.27 | 108.75 | 91.63 |
| MADDPG算法(1000) | 19102.6 | 0.022671 | 0.18 | 0.22 | 0.01 | 34.14 | 33.18 | 13.20 |
| MADDPG算法(10000) | 35916.8 | 0.020543 | 0.09 | 0.20 | 0.15 | 26.36 | 32.23 | 26.33 |
| MADDPG算法(100000) | 28220.1 | 0.017842 | 0.07 | 0.16 | 0.26 | 29.35 | 37.57 | 39.71 |
| GA | 148.68 | 0.49 | 0.49 | 0.14 | 71.98 | 67.45 | 27.08 | |
Table 6 Comparison results of terminal defense performances
| 算法 | 训练时长/s | 平均每轮决 策时长/s | 平均成功率 | 平均最小资产威胁距离/m | ||||
|---|---|---|---|---|---|---|---|---|
| 资产1 | 资产2 | 资产3 | 资产1 | 资产2 | 资产3 | |||
| MAPPO算法 | 2763.07 | 0.063277 | 0.75 | 0.85 | 0.77 | 85.27 | 108.75 | 91.63 |
| MADDPG算法(1000) | 19102.6 | 0.022671 | 0.18 | 0.22 | 0.01 | 34.14 | 33.18 | 13.20 |
| MADDPG算法(10000) | 35916.8 | 0.020543 | 0.09 | 0.20 | 0.15 | 26.36 | 32.23 | 26.33 |
| MADDPG算法(100000) | 28220.1 | 0.017842 | 0.07 | 0.16 | 0.26 | 29.35 | 37.57 | 39.71 |
| GA | 148.68 | 0.49 | 0.49 | 0.14 | 71.98 | 67.45 | 27.08 | |

Fig.10 Changes in the success rates of asset protection of agent trained by MAPPO and MADDPG algorithm

Fig.11 Variation of effect and decision time of GA with optimization generation

Fig.12 The influence of agent reward setting on the convergence process of the algorithm
| [1] |
张继传, 王声才. 现代末端防御武器系统探析[J]. 火力与指挥控制, 2008, 33(增刊1):41-43.
|
|
|
|
| [2] |
|
| [3] |
赵玲, 刘正敏, 姜长生. 末端防御系统中的对抗决策方法研究[J]. 宇航学报, 2011, 32(3):574-581.
|
|
|
|
| [4] |
张成, 吴新良, 张博, 等. 面向机载末端防御的导弹威胁信息融合与识别方法[J]. 现代雷达, 2022, 45(8):1-8.
|
|
|
|
| [5] |
|
| [6] |
全斯农, 范晖, 代大海, 等. 一种基于精细极化目标分解的舰船箔条云识别方法[J]. 雷达学报, 2021, 10(1):61-73.
|
|
|
|
| [7] |
陈静. 雷达箔条干扰原理[M]. 北京: 国防工业出版社, 2007.
|
|
|
|
| [8] |
李永祯, 刘业民, 庞晨, 等. 基于分层极化特性的箔条云识别方法[J]. 系统工程与电子技术, 2021, 43(8):2099-2107.
doi: 10.12305/j.issn.1001-506X.2021.08.10 |
|
doi: 10.12305/j.issn.1001-506X.2021.08.10 |
|
| [9] |
唐波, 鲁嘉淇, 郭琨毅, 等. 针对时空统计特性的箔条云半实物射频仿真[J]. 电子学报, 2023, 51(4):843-849.
doi: 10.12263/DZXB.20211282 |
|
doi: 10.12263/DZXB.20211282 |
|
| [10] |
王湖升, 陈伯孝, 叶倾知. 基于箔条干扰实测数据的对抗方法研究[J]. 系统工程与电子技术, 2023, 45(7):2010-2021.
doi: 10.12305/j.issn.1001-506X.2023.07.11 |
|
|
|
| [11] |
刘业民, 李永祯, 黄大通, 等. 基于极化单脉冲雷达扩展目标角度估计方法[J]. 系统工程与电子技术, 2021, 43(6):1497-1505.
doi: 10.12305/j.issn.1001-506X.2021.06.06 |
|
doi: 10.12305/j.issn.1001-506X.2021.06.06 |
|
| [12] |
张凯娜, 吴上, 张军周. 对抗新型反舰导弹箔条质心干扰策略研究[J]. 舰船电子工程, 2021, 41(11):64-68.
|
|
|
|
| [13] |
白杨, 张成, 王博宇, 等. 机载末端红外对抗作战效能仿真研究[J]. 红外与激光工程, 2022, 51(11):149-158.
|
|
|
|
| [14] |
刘赟, 张翠侠, 颜如祥, 等. 空间箔条有效抛撒时间区间确定和策略研究[J]. 兵工学报, 2015, 36(7):1302-1308.
doi: 10.3969/j.issn.1000-1093.2015.07.020 |
|
doi: 10.3969/j.issn.1000-1093.2015.07.020 |
|
| [15] |
周中良, 程越, 阮铖巍, 等. 空战机动规避与箔条干扰协同应用策略[J]. 西安电子科技大学学报, 2017, 44(5):153-157,164.
|
|
|
|
| [16] |
杨勇, 李亚南. 箔条弹的投放决策研究[J]. 雷达科学与技术, 2016, 14(5):466-470.
|
|
|
|
| [17] |
彭绍荣, 胡生亮, 许江湖, 等. “箔条链”式舰艇反导质心干扰作战方法研究[J]. 现代防御技术, 2022, 50(3):78-83.
doi: 10.3969/j.issn.1009-086x.2022.03.010 |
|
|
|
| [18] |
雷震烁, 刘松涛, 姜宁, 等. 舰艇箔条冲淡干扰发射时机模型研究[J]. 火力与指挥控制, 2021, 46(3):16-19.
|
|
|
|
| [19] |
裴立冠, 刘经东, 马春波. 基于灰狼算法的箔条幕干扰构设方法研究[J]. 系统工程与电子技术, 2023, 46(2):1-13.
|
|
|
|
| [20] |
裴立冠, 周唯, 刘经东. 基于布谷鸟搜索算法的机动化箔条幕布放方法研究[J]. 系统工程与电子技术, 2023, 46(3):1-13.
|
|
|
|
| [21] |
蔡蒨, 张为华. 箔条配比优化仿真分析[J]. 舰船电子工程, 2015, 35(5):77-79,88.
|
|
|
|
| [22] |
王晴昊, 姚登凯, 赵顾颢, 等. 远距离支援复合干扰空域规划研究[J]. 西北工业大学学报, 2018, 36(6):1176-1184.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
丁世飞, 杜威, 张健, 等. 多智能体深度强化学习研究进展[J]. 计算机学报, 2024, 47(7):1347-1567.
|
|
|
|
| [27] |
葛致磊, 王红梅, 王佩, 等. 导弹导引系统原理[M]. 北京: 国防工业出版社, 2016.
|
|
|
|
| [28] |
张合, 李豪杰. 引信机构学[M]. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [29] |
尹建平, 王志军. 弹药学[M] .第3版. 北京: 北京理工大学出版社, 2018.
|
|
|
|
| [30] |
方良, 郝建滨, 朱璐, 等. 基于对抗反舰导弹的箔条质心干扰建模与仿真研究[J]. 兵器装备工程学报, 2019, 40(2):59-61.
|
|
|
|
| [31] |
白岚, 王科. 机载箔条干扰弹投放时机的仿真研究[J]. 舰船电子工程, 2012, 32(12):85-87.
|
|
|
|
| [32] |
|
| [1] | LOU Shuhan, WANG Chongchong, GONG Wei, DENG Liyuan, LI Li. Collaborative Regional Information Collection Strategy Based on MLAT-DRL Algorithm [J]. Acta Armamentarii, 2024, 45(12): 4423-4434. |
| [2] | CHEN Yaping, WANG Nan, HONG Huajie, LIU Zhaoyang, YAN Xiangda. Pheromone Positive Incentive Grid Method for Multi-unmanned Platform Regional Surveillance Task [J]. Acta Armamentarii, 2023, 44(9): 2859-2870. |
| [3] | JIA Jinwei, HAN Zhuangzhi, LIU Limin, XIE Hui. Design Technology of Radio Frequency Stealth Anti-sorting Signal Based on Cosine-exponential Nonlinear Chaotic Mapping [J]. Acta Armamentarii, 2023, 44(6): 1846-1857. |
| [4] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [5] | ZHANG Zhong-min, LI Jun-shan, SONG Ping2, YAN Qi-fei. A Multi-agent Intelligent Decision Approach Based on Fuzzy Analytic Hierarchy Process for Service Status of ElectronicCountermeasures Equipment [J]. Acta Armamentarii, 2014, 35(4): 516-522. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||