
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240292-.doi: 10.12382/bgxb.2024.0292
Previous Articles Next Articles
HOU Tianle1, BI Wenhao1,2,*( ), HUANG Zhanjun1,2, LI Minghao1, ZHANG An1,2
), HUANG Zhanjun1,2, LI Minghao1, ZHANG An1,2
Received:2024-04-16
Online:2025-04-30
Contact:
BI Wenhao
CLC Number:
HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems[J]. Acta Armamentarii, 2025, 46(4): 240292-.
Add to citation manager EndNote|Ris|BibTeX
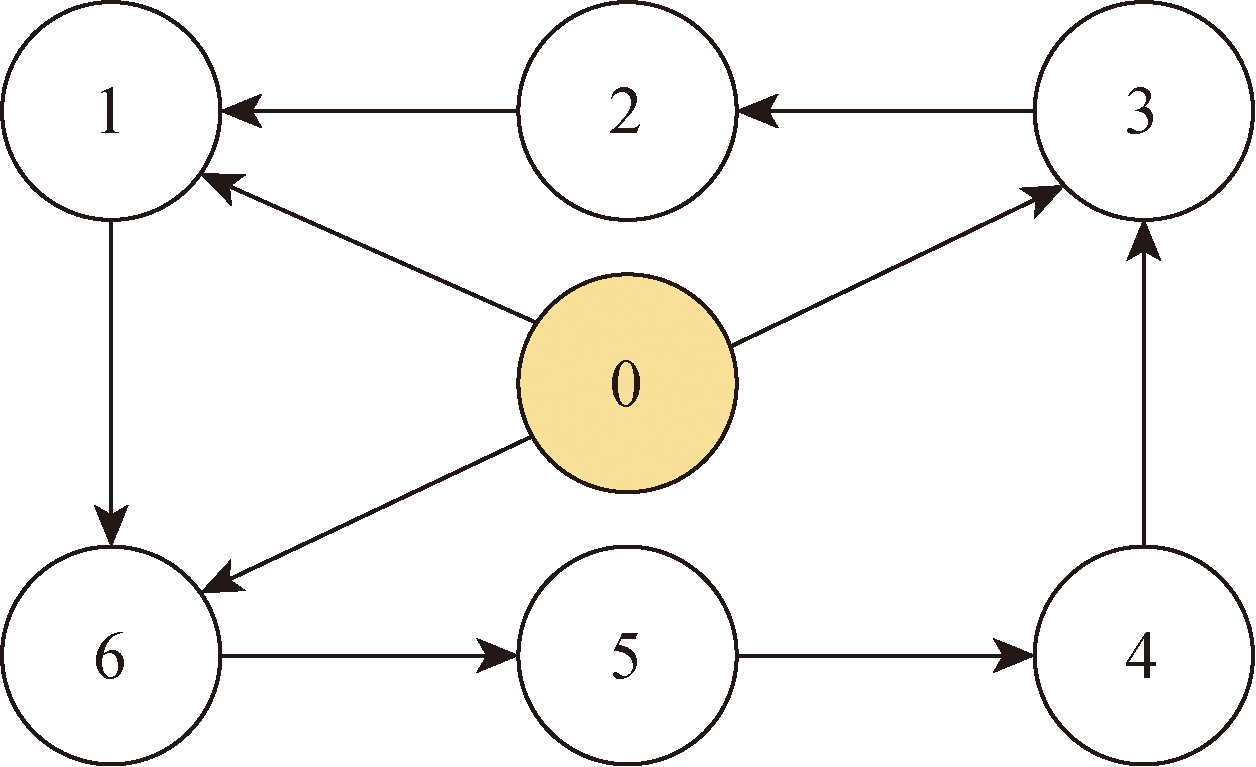
Fig.1 Communication topology (Example 1)
| 智能体 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | -1 | 0 | |
| 1 | 10 | -1 | 0 |
| 2 | 2 | -2 | 0.5 |
| 3 | -10 | 3 | 0 |
| 4 | 5 | 1 | 1 |
| 5 | -3 | 2 | -1 |
| 6 | 3 | -3 | 0 |
Table 1 The initial states of MASs (Example 1)
| 智能体 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | -1 | 0 | |
| 1 | 10 | -1 | 0 |
| 2 | 2 | -2 | 0.5 |
| 3 | -10 | 3 | 0 |
| 4 | 5 | 1 | 1 |
| 5 | -3 | 2 | -1 |
| 6 | 3 | -3 | 0 |
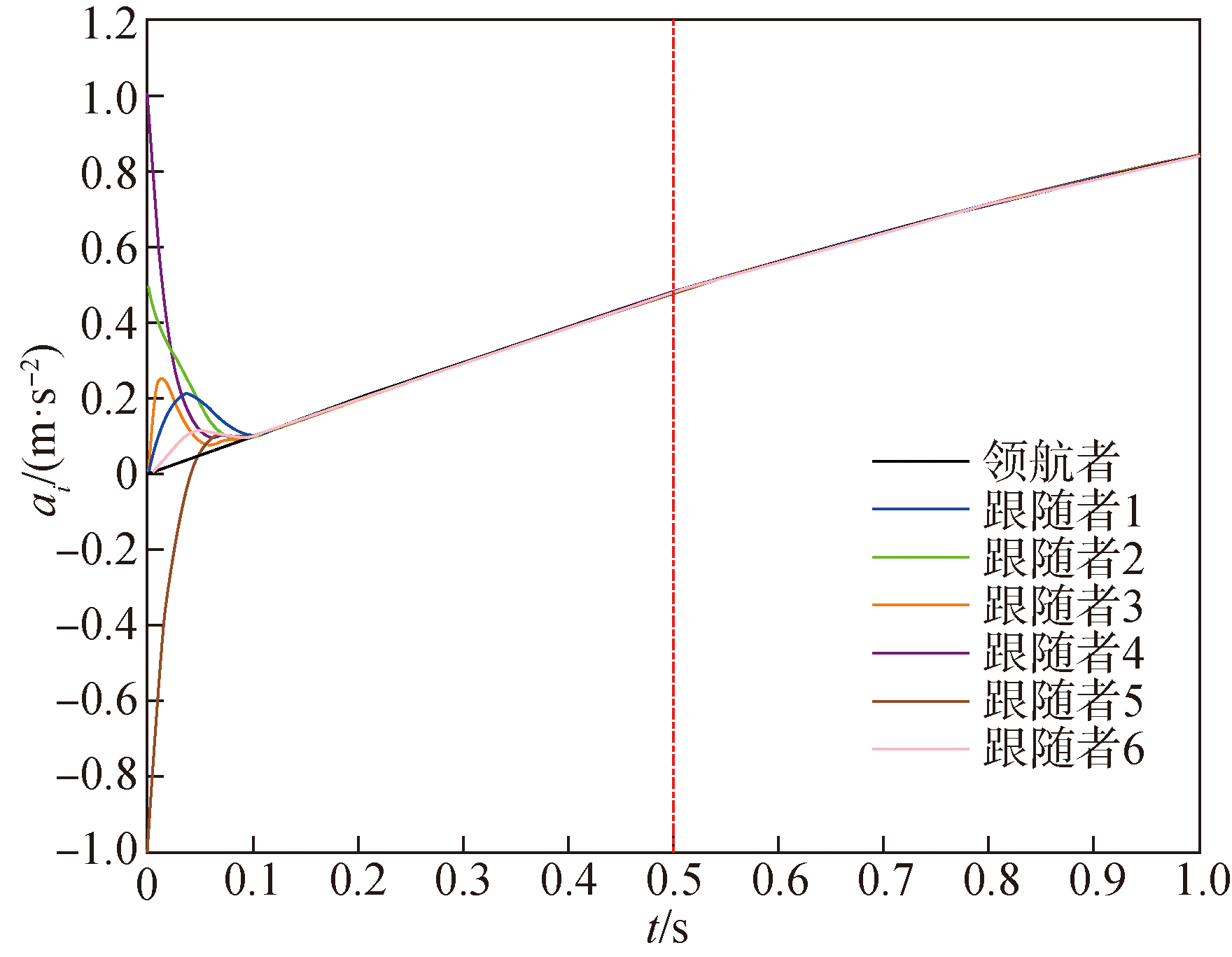
Fig.2 Estimated acceleration trajectories of agents
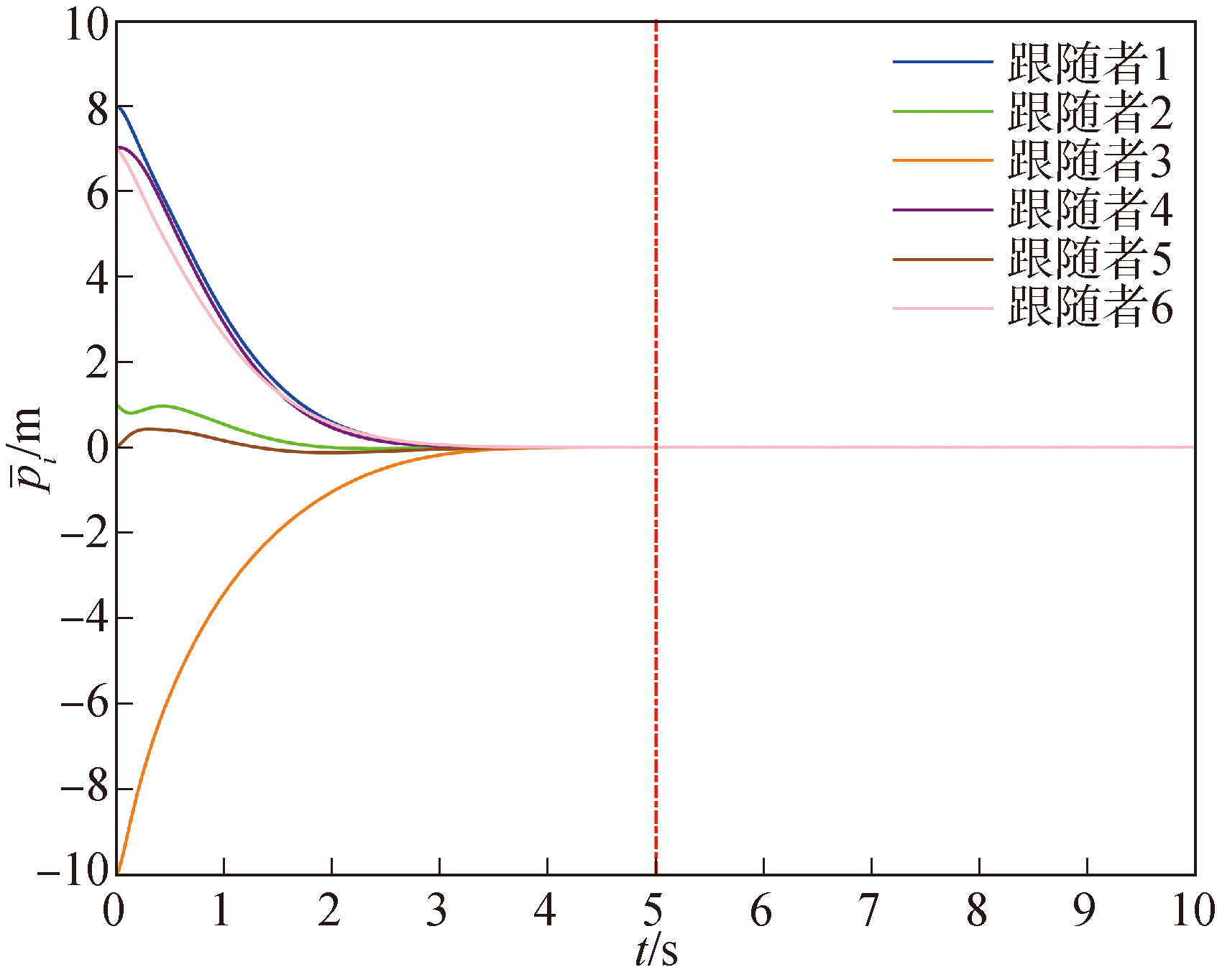
Fig.3 Position tracking error trajectories of followers
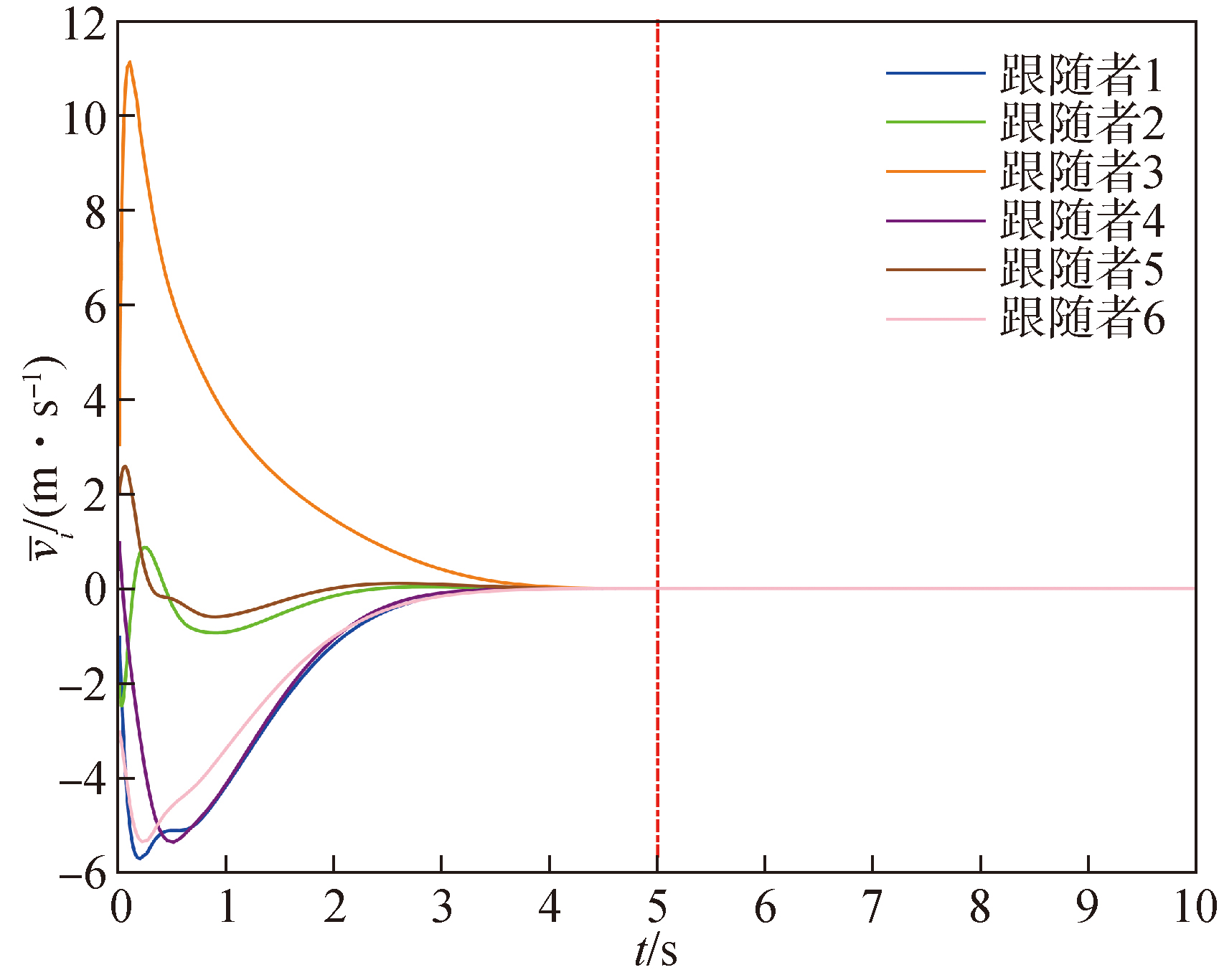
Fig.4 Velocity tracking error trajectories of followers
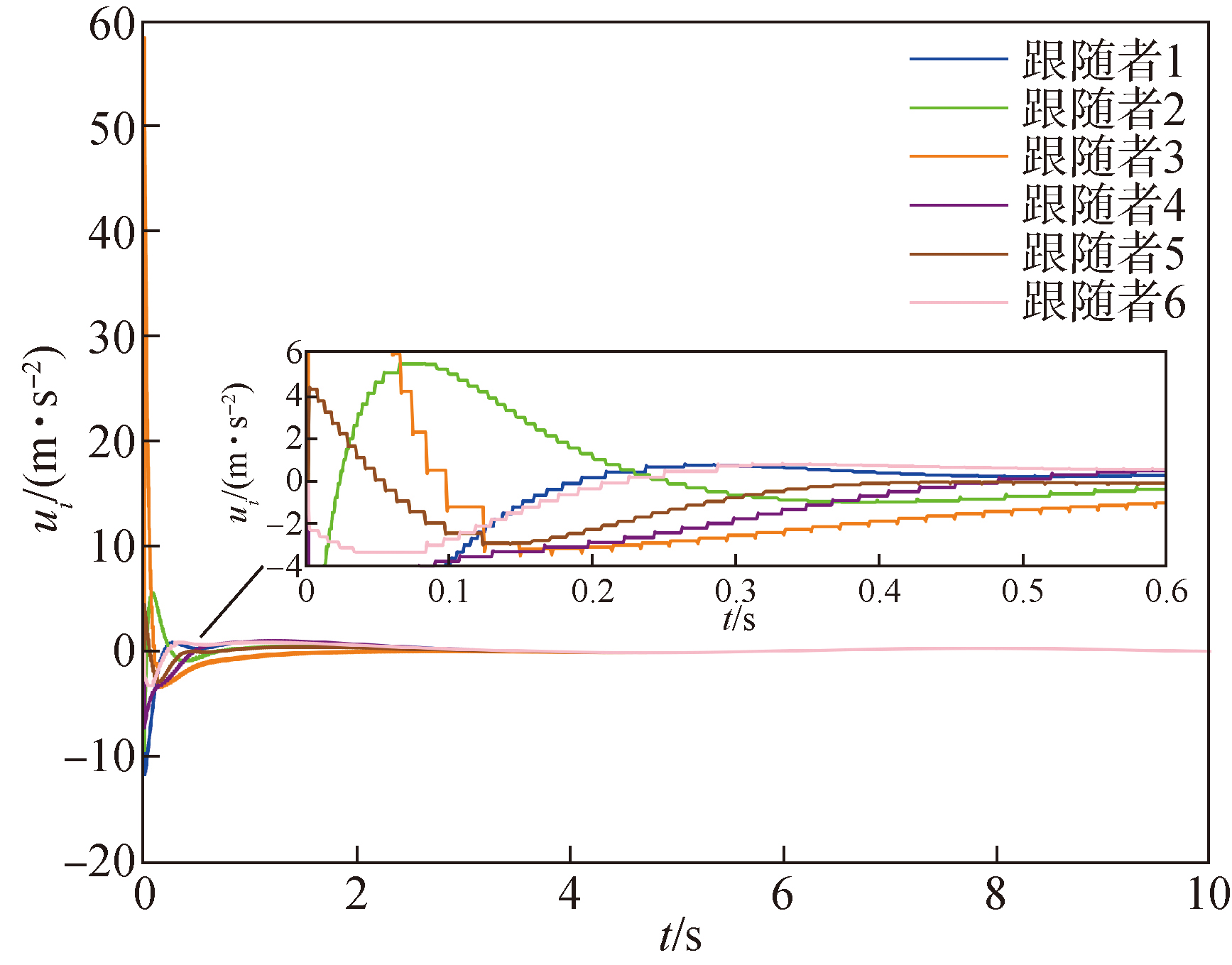
Fig.5 Control input trajectories of followers
| 类别 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 采用事件触发机制 | 999 | 853 | 843 | 964 | 860 | 970 |
| 未采用事件触发机制 | 5000 | |||||
Table 2 Comparison of update frequencies of controller with and without event-triggering mechanism (Example 1)
| 类别 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 采用事件触发机制 | 999 | 853 | 843 | 964 | 860 | 970 |
| 未采用事件触发机制 | 5000 | |||||
| 算法 | 算法参数 |
|---|---|
| 文献[32]算法 | k1=1.2,k2=0.3,k3=0.5,k4=0.8,k5=3.5,k6=2,a=1,b=2,β=1.5,l1=0.1,l2=0.3,ρ=0.2 |
| 本文算法 | k1=1,δ=1,h1=2,α1=2,k2=30,k3=15,h2=5,α2=8,γ=5,T1=0.5 |
Table 3 Algorithm parameters (Example 2)
| 算法 | 算法参数 |
|---|---|
| 文献[32]算法 | k1=1.2,k2=0.3,k3=0.5,k4=0.8,k5=3.5,k6=2,a=1,b=2,β=1.5,l1=0.1,l2=0.3,ρ=0.2 |
| 本文算法 | k1=1,δ=1,h1=2,α1=2,k2=30,k3=15,h2=5,α2=8,γ=5,T1=0.5 |

Fig.6 Total tracking error trajectories (Example 2)

Fig.7 Control input trajectories of followers (Example 2)

Fig.8 Total tracking error trajectories (Example 3)
| 算法 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 本文算法 | 707 | 694 | 663 | 680 | 638 | 663 |
| 文献[24]算法 | 3000 | |||||
Table 4 Comparison of update frequencies of controller with and without event-triggering mechanism (Example 3)
| 算法 | 跟随者智能体 | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 本文算法 | 707 | 694 | 663 | 680 | 638 | 663 |
| 文献[24]算法 | 3000 | |||||

Fig.9 Hardware platform
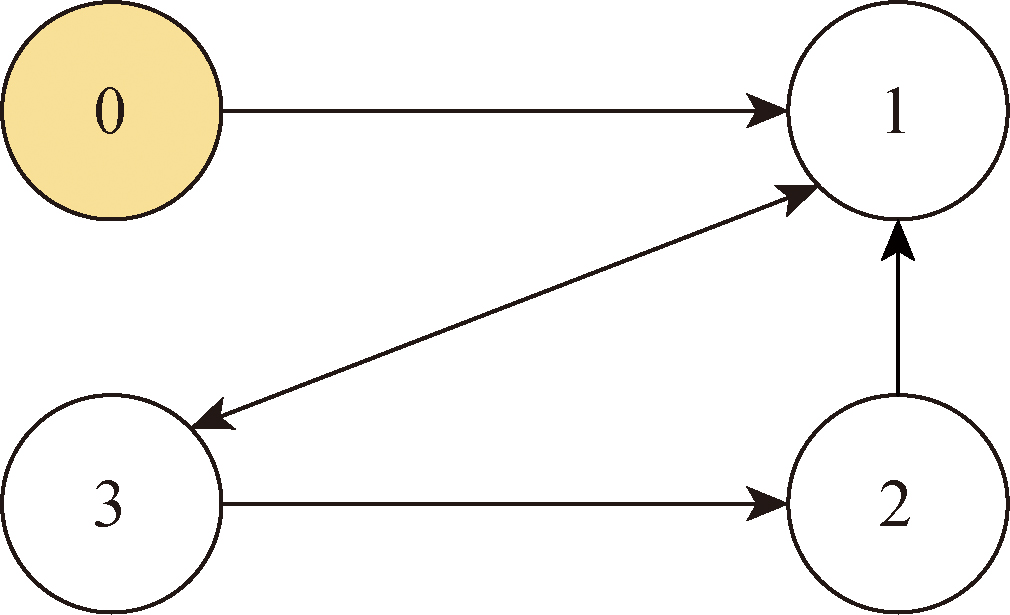
Fig.10 Communication topology of quadrotor UAVs
| 无人机 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | [0,1,0]T | [0,0,0]T | |
| 1 | [2.5,1,0]T | [0,0,0]T | [0,0,0]T |
| 2 | [2.5,-1.5,0]T | [0,0,0]T | [0,0,0]T |
| 3 | [0,-1.5,0]T | [0,0,0]T | [0,0,0]T |
Table 5 The initial position and velocity of UAVs
| 无人机 | pi/m | vi/(m·s-1) | ai/(m·s-2) |
|---|---|---|---|
| 0 | [0,1,0]T | [0,0,0]T | |
| 1 | [2.5,1,0]T | [0,0,0]T | [0,0,0]T |
| 2 | [2.5,-1.5,0]T | [0,0,0]T | [0,0,0]T |
| 3 | [0,-1.5,0]T | [0,0,0]T | [0,0,0]T |

Fig.11 formation flight
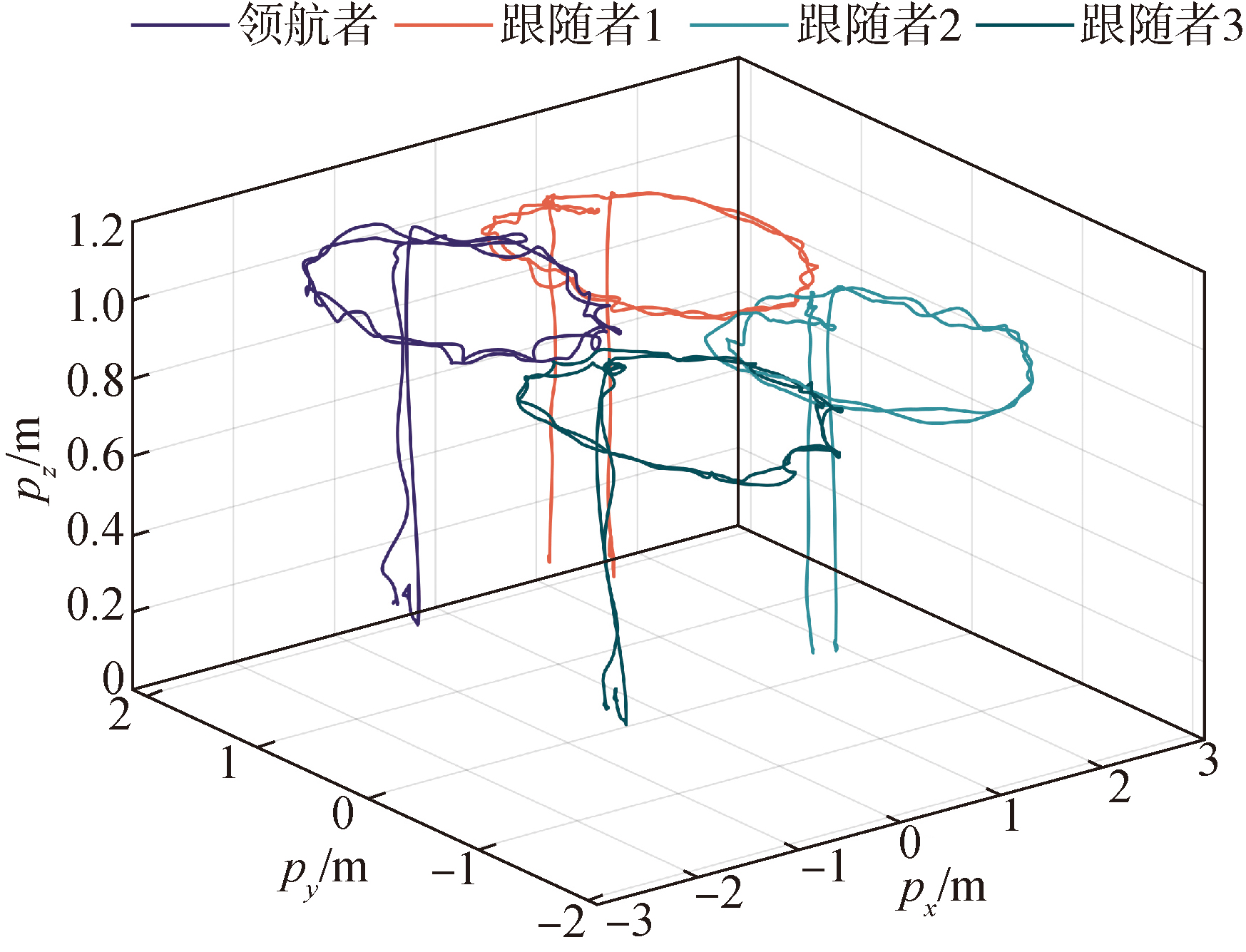
Fig.12 Flight trajectories

Fig.13 Position tracking trajectories

Fig.14 Velocity tracking trajectories
| 跟随者无人机 | x轴方向 | y轴方向 | z轴方向 |
|---|---|---|---|
| 1 | 251 | 264 | 243 |
| 2 | 323 | 288 | 281 |
| 3 | 312 | 292 | 284 |
Table 6 The triggering frequency with the event triggering mechanism
| 跟随者无人机 | x轴方向 | y轴方向 | z轴方向 |
|---|---|---|---|
| 1 | 251 | 264 | 243 |
| 2 | 323 | 288 | 281 |
| 3 | 312 | 292 | 284 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
王彤, 李磊, 蒋琪. “进攻性蜂群使能战术”项目推进无人蜂群能力发展分析[J]. 战术导弹技术, 2020(1):33-38.
|
|
|
|
| [8] |
陈士涛, 李大喜, 孙鹏, 等. 美军作战协同能力发展演进分析[J]. 中国电子科学研究院学报, 2021, 16(11):1113-1118.
|
|
|
|
| [9] |
孙佳琛, 王金龙, 陈瑾, 等. 群体智能协同通信:愿景、模型和关键技术[J]. 中国科学:信息科学, 2020, 50(3):307-317.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1002/asjc.1814 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
王晶, 顾维博, 窦立亚. 基于Leader-Follower的多无人机编队轨迹跟踪设计[J]. 航空学报, 2020, 41(增刊1):723758.
|
|
doi: 10.7527/S1000-6893.2019.23758 |
|
| [18] |
吴宇, 梁天骄. 基于改进一致性算法的无人机编队控制[J]. 航空学报, 2020, 41(9):323848.
doi: 10.7527/S1000-6893.2020.23848 |
|
doi: 10.7527/S1000-6893.2020.23848 |
|
| [19] |
|
| [20] |
doi: 10.1109/TCYB.2013.2288980 pmid: 25137682 |
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
张继雄, 李宗刚, 宁小刚, 等. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(增刊2):223-234.
|
|
doi: 10.12382/bgxb.2023.0664 |
|
| [31] |
|
| [32] |
于镝, 王亚洁, 赵博, 等. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5):1403-1413.
|
|
doi: 10.12382/bgxb.2022.1267 |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [1] | WANG Haoning, GUO Jie, WAN Yangyang, ZHANG Baochao, TANG Shengjing, LI Xiang. Formation Control of Hypersonic Glide Vehicles Considering Position Adjustment in Launch Direction [J]. Acta Armamentarii, 2025, 46(4): 240410-. |
| [2] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [3] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [4] | ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control [J]. Acta Armamentarii, 2024, 45(10): 3619-3630. |
| [5] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [6] | ZHANG Jixiong, LI Zonggang, NING Xiaogang, CHEN Yinjuan. Fully Distributed Consensus Control of General Linear Multi-agent System Based on Dynamic Event-trigger [J]. Acta Armamentarii, 2023, 44(S2): 223-234. |
| [7] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [8] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [9] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [10] | YU Di, WANG Yajie, ZHAO Bo, LIU Qiong. Fixed-Time Tracking Control of Multi-agent Systems under Dynamic Event-Triggering Mechanism [J]. Acta Armamentarii, 2023, 44(5): 1403-1413. |
| [11] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [12] | CAO Hao-zhe, WU Yan-xuan, ZHOU Feng, WANG Zheng-jie. Research on Containment Control of Second-order Nonlinear Multi-agent with Collision Avoidance Mechanism [J]. Acta Armamentarii, 2016, 37(9): 1646-1654. |
| [13] | XUE Rui-bin, SONG Jian-mei, ZHANG Min-qiang. Research on Distributed Multi-vehicle Coordinated Formation Flight Control with Coupling Time-delay and Jointly-connected Topologies [J]. Acta Armamentarii, 2015, 36(3): 492-502. |
| [14] | YU Di, WU Qing-he, WANG Yin-qiu. Consensus Analysis of High-order Multi-agent Network in Fixed and Dynamical Switching Topology [J]. Acta Armamentarii, 2012, 33(1): 56-62. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||