
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240343-.doi: 10.12382/bgxb.2024.0343
Previous Articles Next Articles
HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei*( )
)
Received:2024-03-03
Online:2025-04-30
Contact:
SONG Lei
CLC Number:
HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense[J]. Acta Armamentarii, 2025, 46(4): 240343-.
Add to citation manager EndNote|Ris|BibTeX
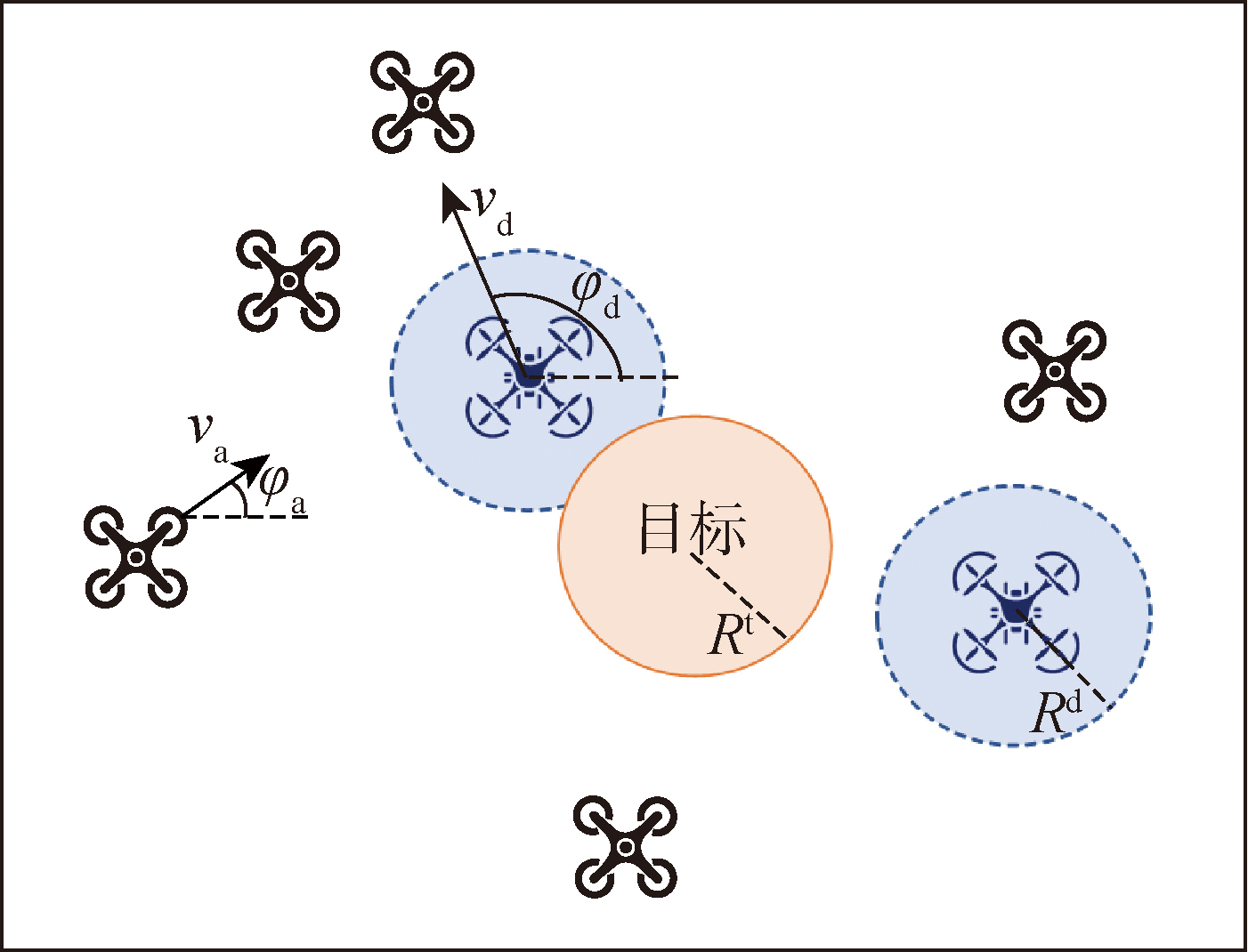
Fig.1 Schematic diagram of a problem scenario

Fig.2 Schematic diagram of algorithm framework
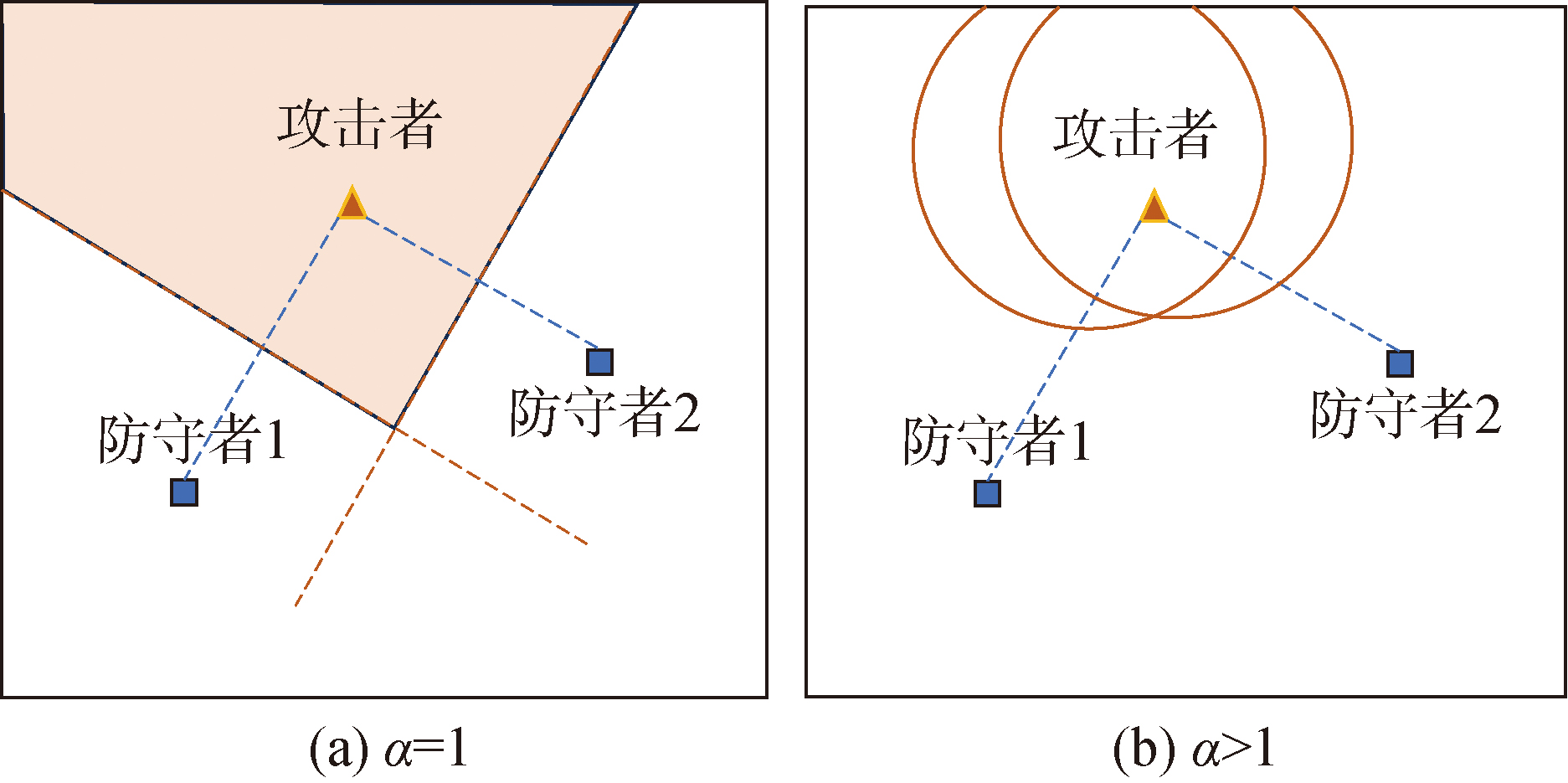
Fig.3 The attacker’s reachable set for R d j=0
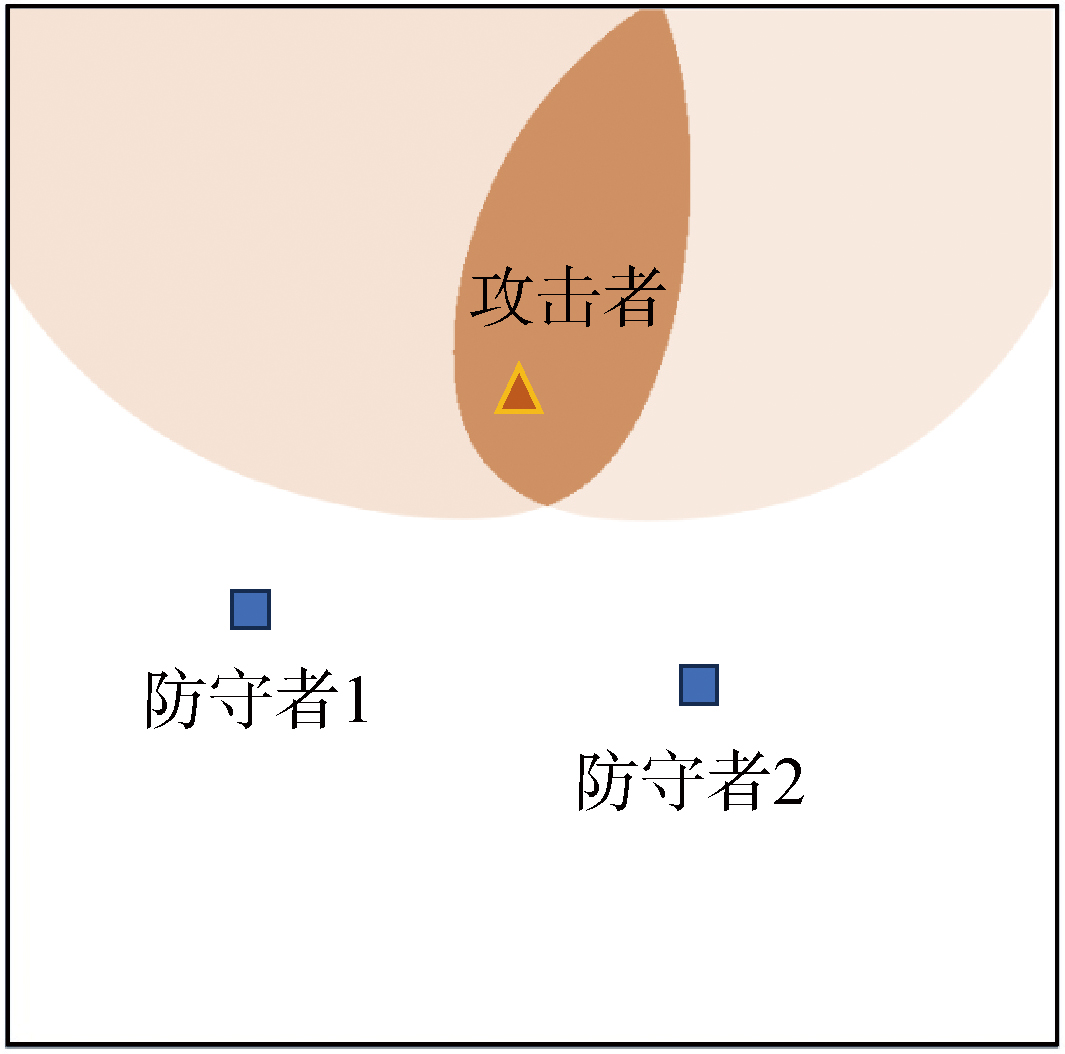
Fig.4 The attacker’s reachable set for R d j≠0
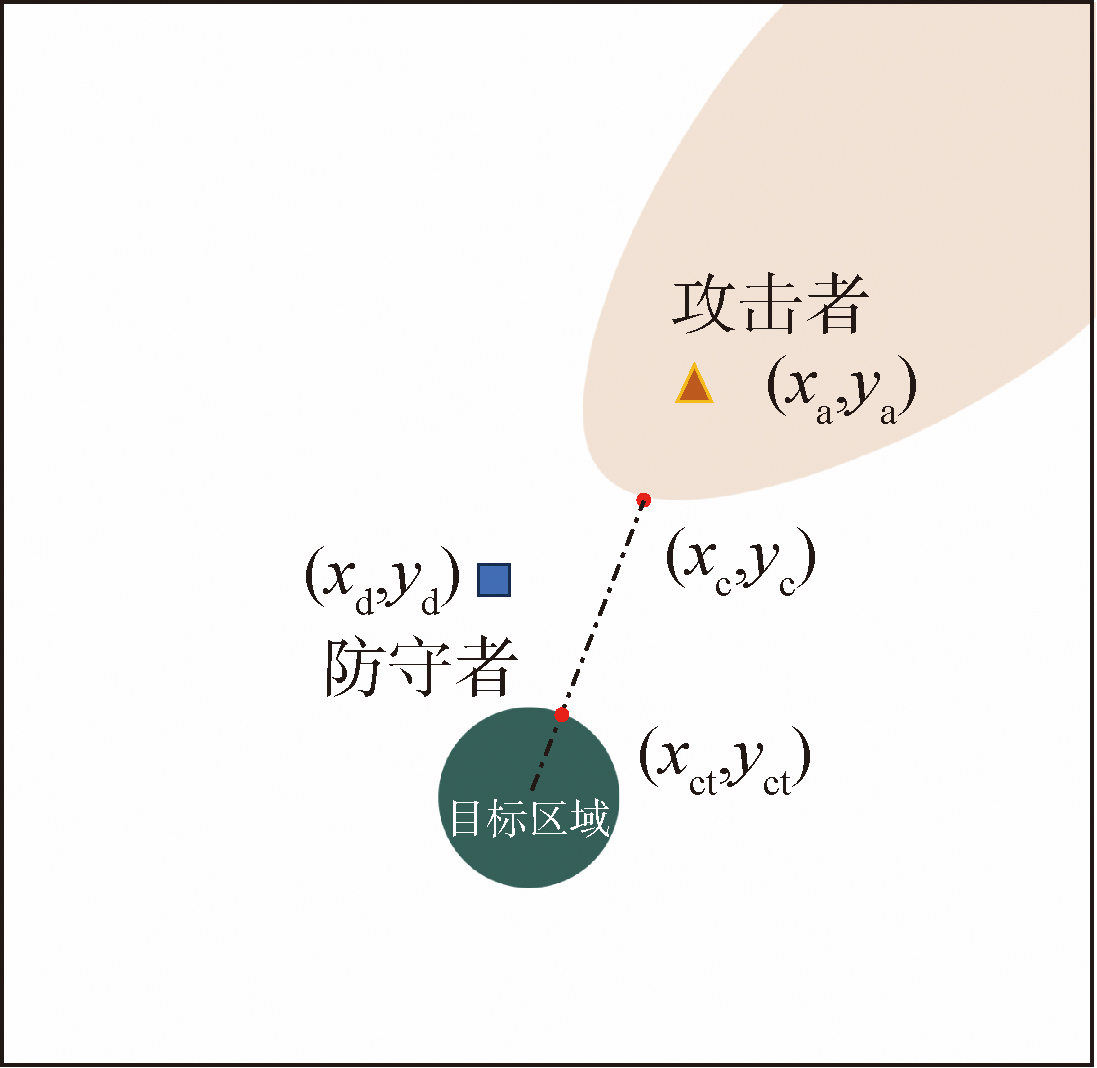
Fig.5 Spatial reward of pursuit mission
Fig.6 All possible optimal capture points
Fig.7 Optimal capture point solving algorithm
Fig.8 Schematic diagram of DQN
Fig.9 Schematic diagram of neural net

Fig.10 Flowchart of sequential capture algorithm
| 参数 | 数值 |
|---|---|
| γ | 0.98 |
| M | 12800 |
| NBatchSize | 64 |
| η | 0.0003 |
| NmaxEp | 40000 |
| NmaxStep | 120 |
| εmax | 0.95 |
| Δε | 0.001 |
| NPrestep | 4000 |
Table 1 Training parameters of the algorithm
| 参数 | 数值 |
|---|---|
| γ | 0.98 |
| M | 12800 |
| NBatchSize | 64 |
| η | 0.0003 |
| NmaxEp | 40000 |
| NmaxStep | 120 |
| εmax | 0.95 |
| Δε | 0.001 |
| NPrestep | 4000 |
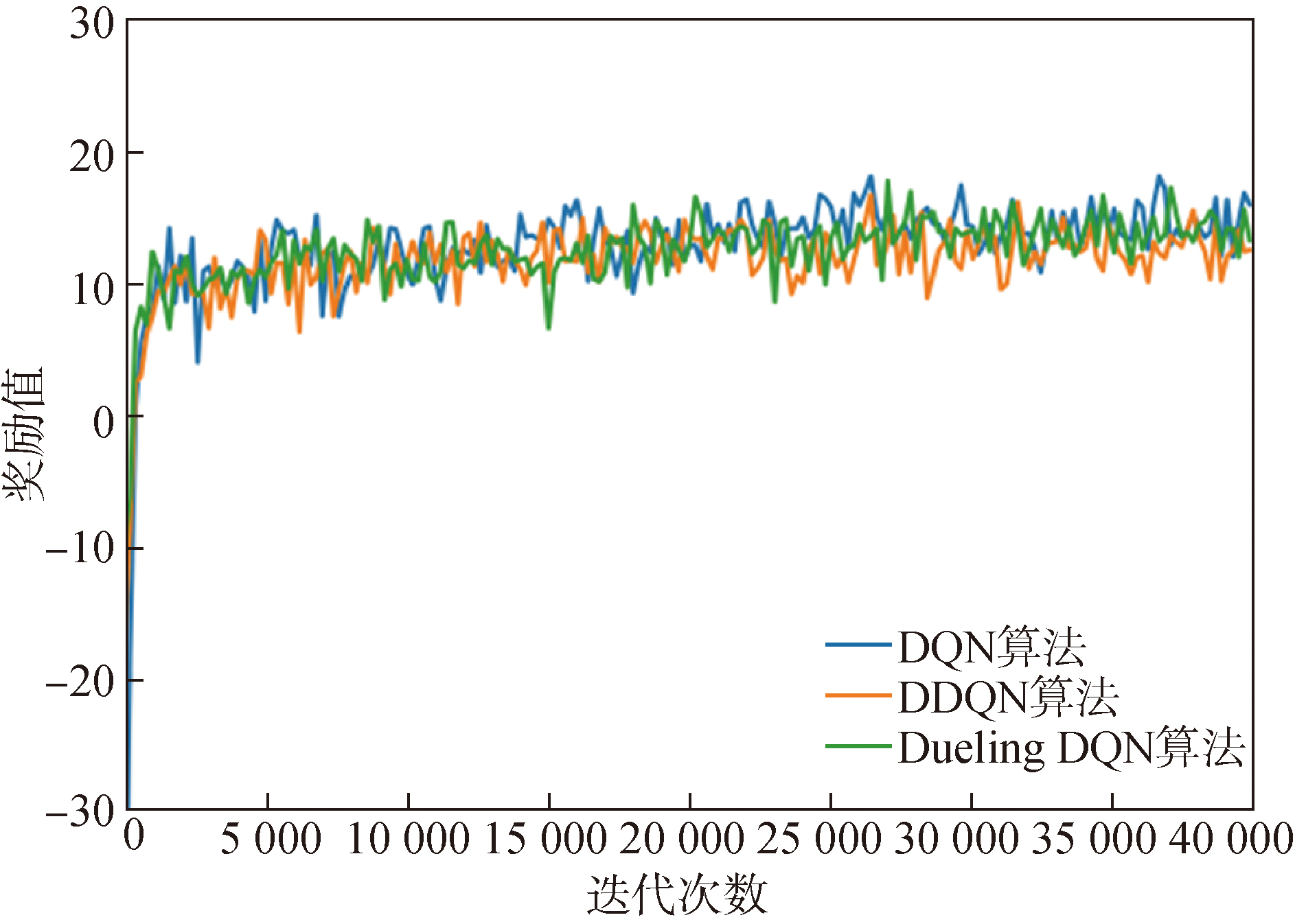
Fig.11 Average reward curves of training

Fig.12 The trajectories of defenders
| 算法 | 平均拦截失败数量 |
|---|---|
| DQN算法 | 1.15 |
| DDQN算法 | 1.13 |
| Dueling DQN算法 | 1.13 |
| 基于最优匹配的任务规划算法 | 1.51 |
| 基于改进粒子群的任务规划算法 | 2.96 |
Table 2 Test results of the average number of interception failures for different algorithms
| 算法 | 平均拦截失败数量 |
|---|---|
| DQN算法 | 1.15 |
| DDQN算法 | 1.13 |
| Dueling DQN算法 | 1.13 |
| 基于最优匹配的任务规划算法 | 1.51 |
| 基于改进粒子群的任务规划算法 | 2.96 |
| 编号 | 坐标/km |
|---|---|
| 1 | (-3.00,2.00) |
| 2 | (-2.75,2.25) |
| 3 | (-2.50,2.50) |
| 4 | (-2.25,2.75) |
| 5 | (1.00,2.50) |
| 6 | (-3.50,-4.25) |
| 7 | (-3.25,-4.25) |
| 8 | (-3.00,-4.25) |
| 9 | (-2.75,-4.25) |
| 10 | (2.00,-4.00) |
Table 3 Attacker’s initial coordinates
| 编号 | 坐标/km |
|---|---|
| 1 | (-3.00,2.00) |
| 2 | (-2.75,2.25) |
| 3 | (-2.50,2.50) |
| 4 | (-2.25,2.75) |
| 5 | (1.00,2.50) |
| 6 | (-3.50,-4.25) |
| 7 | (-3.25,-4.25) |
| 8 | (-3.00,-4.25) |
| 9 | (-2.75,-4.25) |
| 10 | (2.00,-4.00) |
| 编号 | 坐标/km |
|---|---|
| 1 | (-1.25,-1.50) |
| 2 | (-1.00,-1.50) |
Table 4 Defender’s initial coordinates
| 编号 | 坐标/km |
|---|---|
| 1 | (-1.25,-1.50) |
| 2 | (-1.00,-1.50) |

Fig.13 The trajectories of UAVs obtained by task planning algorithm based on optimal matching
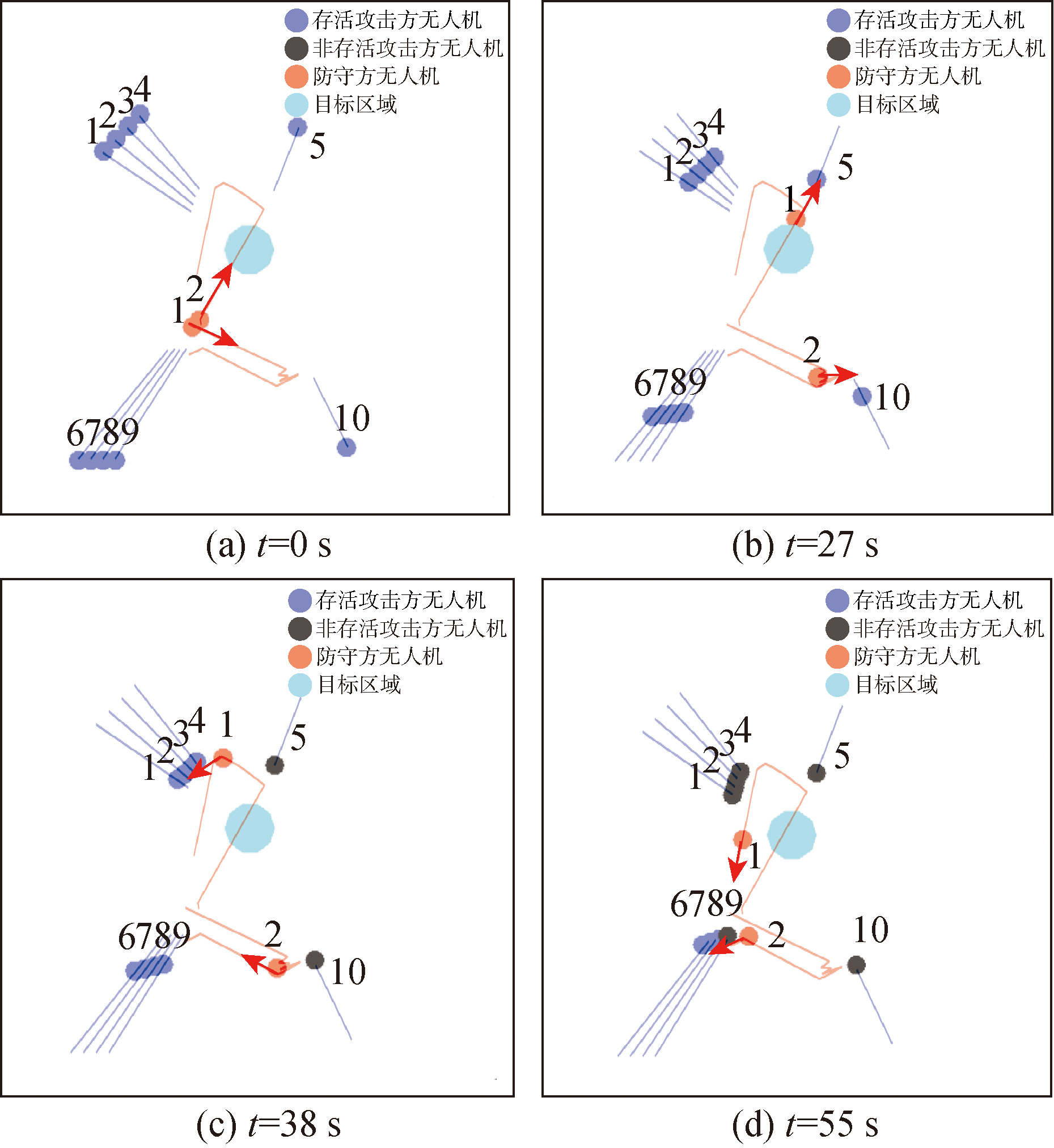
Fig.14 The trajectories of UAVs obtained by sequential capture algorithm based on temporal and spatial rewards

Fig.15 Average reward curves under different numbers of attackers
| 场景 | 平均拦截失败数量 |
|---|---|
| 2对5 | 0.26 |
| 2对10 | 1.15 |
| 2对15 | 2.36 |
Table 5 Average number of failed interceptions under different numbers of attackers
| 场景 | 平均拦截失败数量 |
|---|---|
| 2对5 | 0.26 |
| 2对10 | 1.15 |
| 2对15 | 2.36 |
| [1] |
孔国杰, 冯时, 于会龙, 等. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1):11-26.
doi: 10.12382/bgxb.2022.0930 |
|
doi: 10.12382/bgxb.2022.0930 |
|
| [2] |
|
| [3] |
李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9):2533-2545.
doi: 10.12382/bgxb.2023.0514 |
|
doi: 10.12382/bgxb.2023.0514 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
王磊, 徐超, 李淼, 等. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8):2224-2232.
doi: 10.12382/bgxb.2022.0968 |
|
doi: 10.12382/bgxb.2022.0968 |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
刘冰雁, 叶雄兵, 高勇, 等. 基于分支深度强化学习的非合作目标追逃博弈策略求解[J]. 航空学报, 2020, 41(10):324040.
doi: 10.7527/S1000-6893.2020.24040 |
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
张嘉玲, 姜永超, 李博宸, 等. 面向反水雷的海空协同时间最优雷区覆盖规划方法[J]. 指挥与控制学报, 2023, 9(4):469-477.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| [2] | MEI Zewei, LI Tianren, ZHU Jialin, SHAO Xingling, DING Tianyun, LIU Jun. A Trajectory Planning Method Based on DQN Variable Dynamic Intelligent Decision [J]. Acta Armamentarii, 2024, 45(12): 4395-4406. |
| [3] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, MOU Zhi-ying. Coalition Formation of Multiple Heterogeneous Unmanned Aerial Vehicles in Cooperative Search and Attack in UnknownEnvironment [J]. Acta Armamentarii, 2015, 36(12): 2284-2297. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||