
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240260-.doi: 10.12382/bgxb.2024.0260
Previous Articles Next Articles
WU Junqi1, WU Bi2, DENG Hongbin1,*( ), ZHOU Zhiqian2
), ZHOU Zhiqian2
Received:2024-04-08
Online:2025-04-30
Contact:
DENG Hongbin
CLC Number:
WU Junqi, WU Bi, DENG Hongbin, ZHOU Zhiqian. Time-varying UAV Formation Optimal Tracking Control with Dynamic Parameter Extended Control Barrier Functions[J]. Acta Armamentarii, 2025, 46(4): 240260-.
Add to citation manager EndNote|Ris|BibTeX
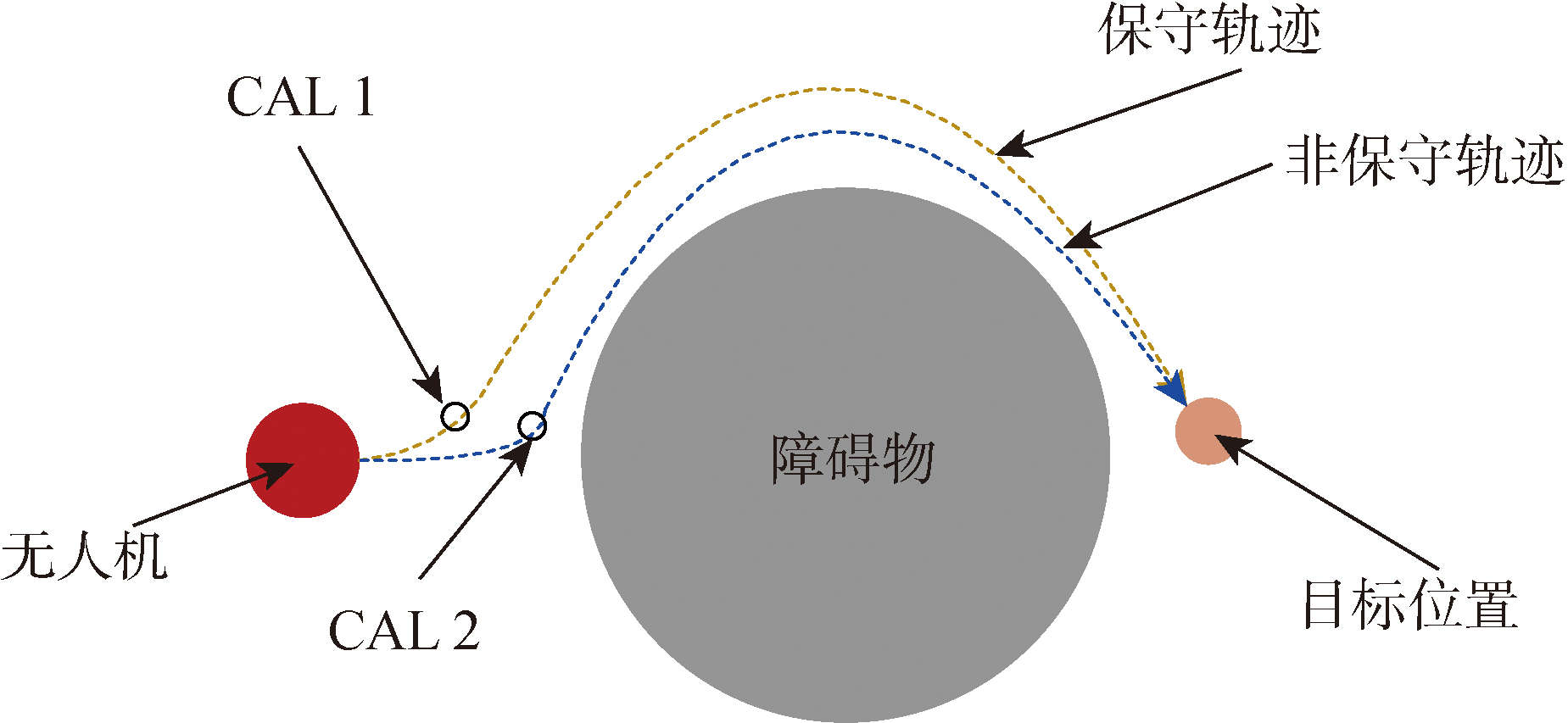
Fig.1 Conservatism and feasibility of trajectory
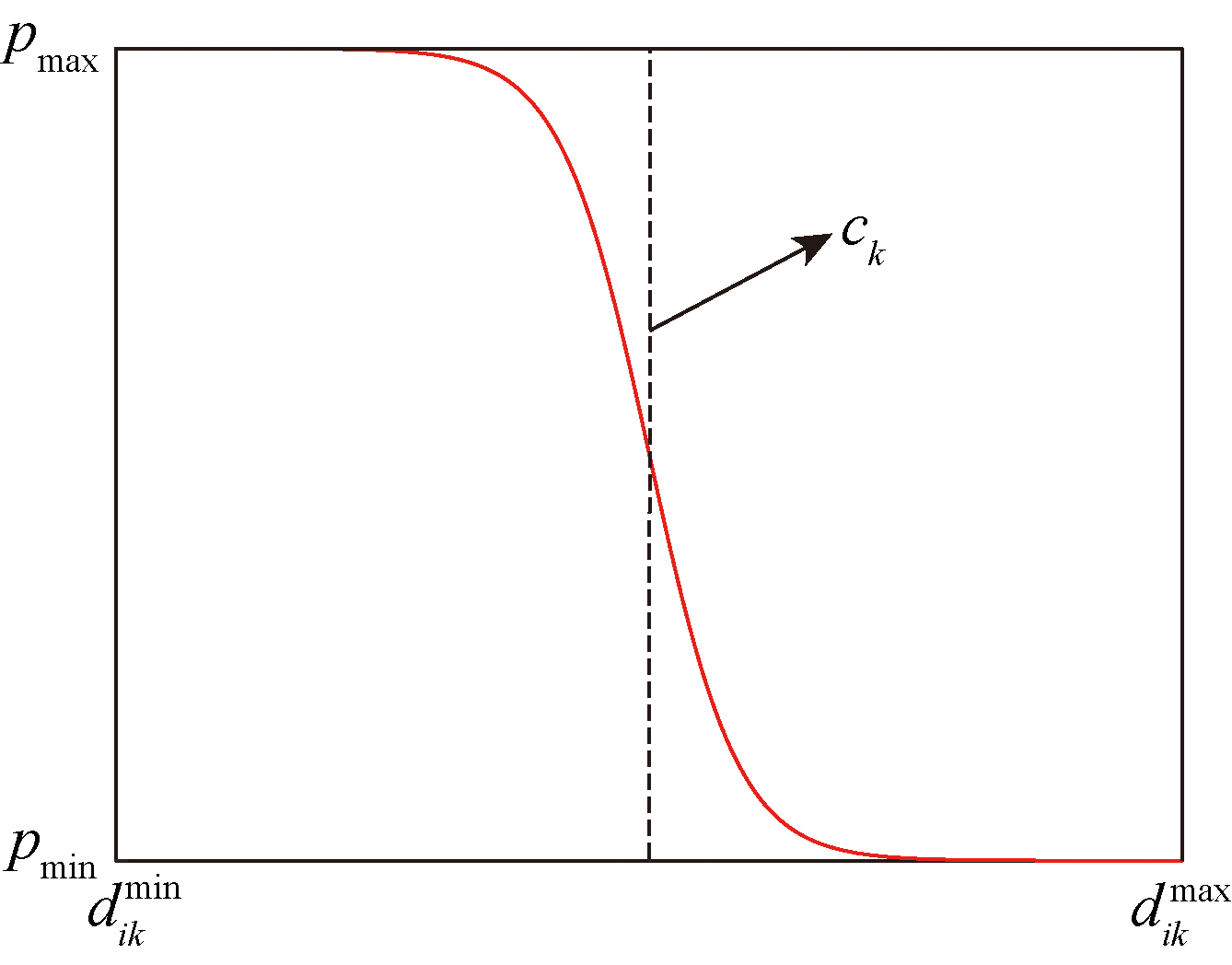
Fig.2 Class K function adaptive rules

Fig.3 Control system framework
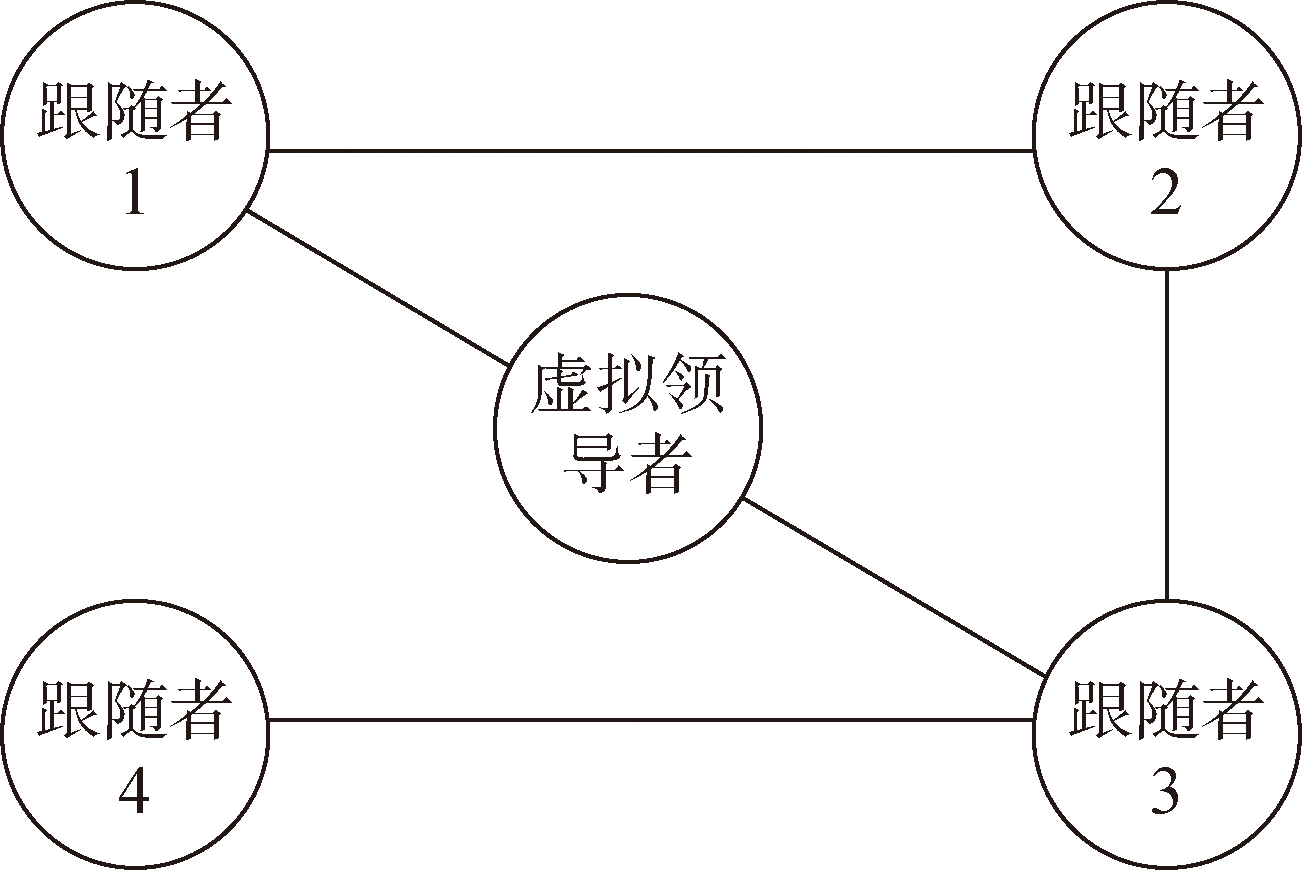
Fig.4 Formation communication topology

Fig.5 Observation results of velocity observer
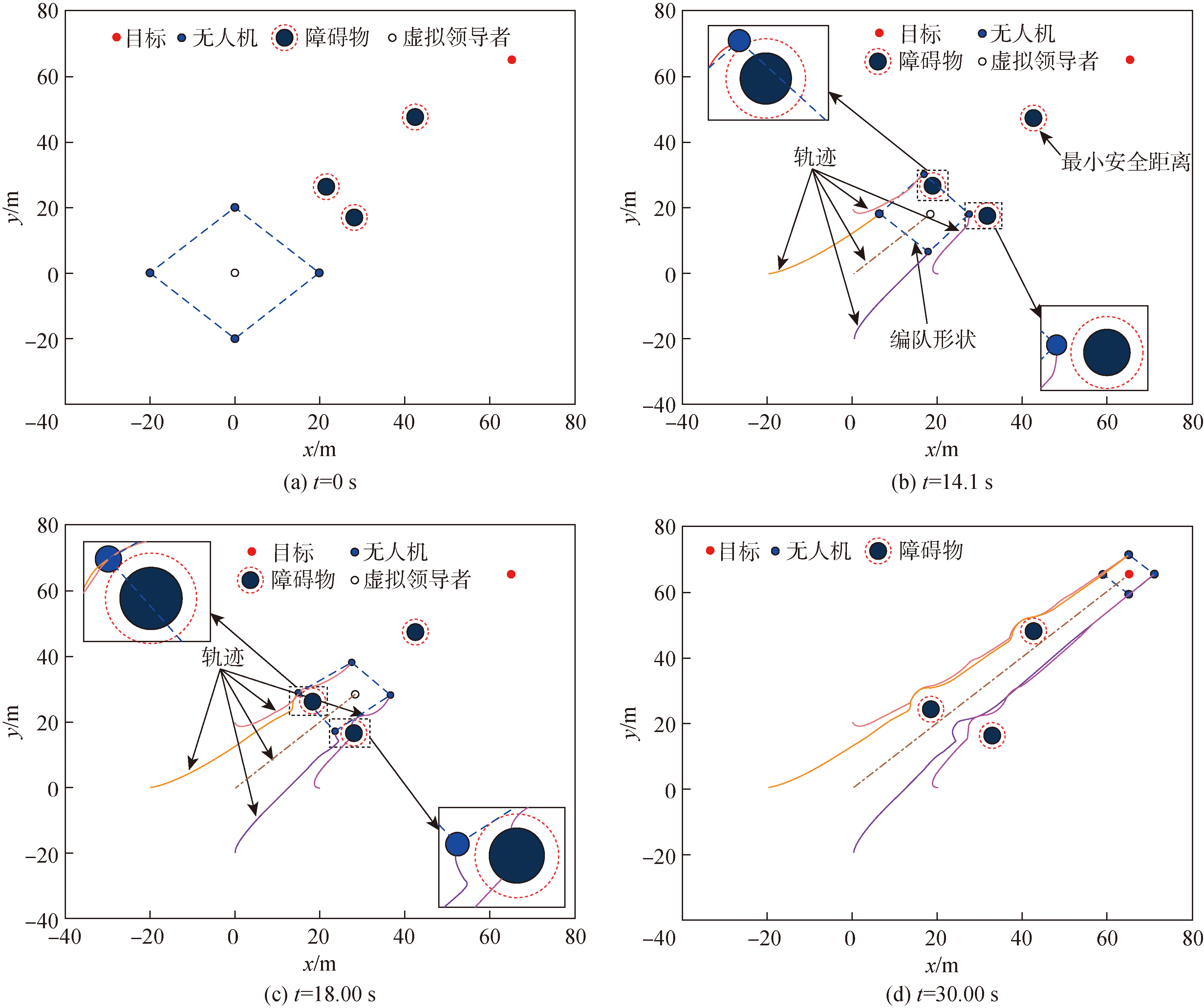
Fig.6 UAV formation state at different times

Fig.7 Distance between UAV and obstacle at different times
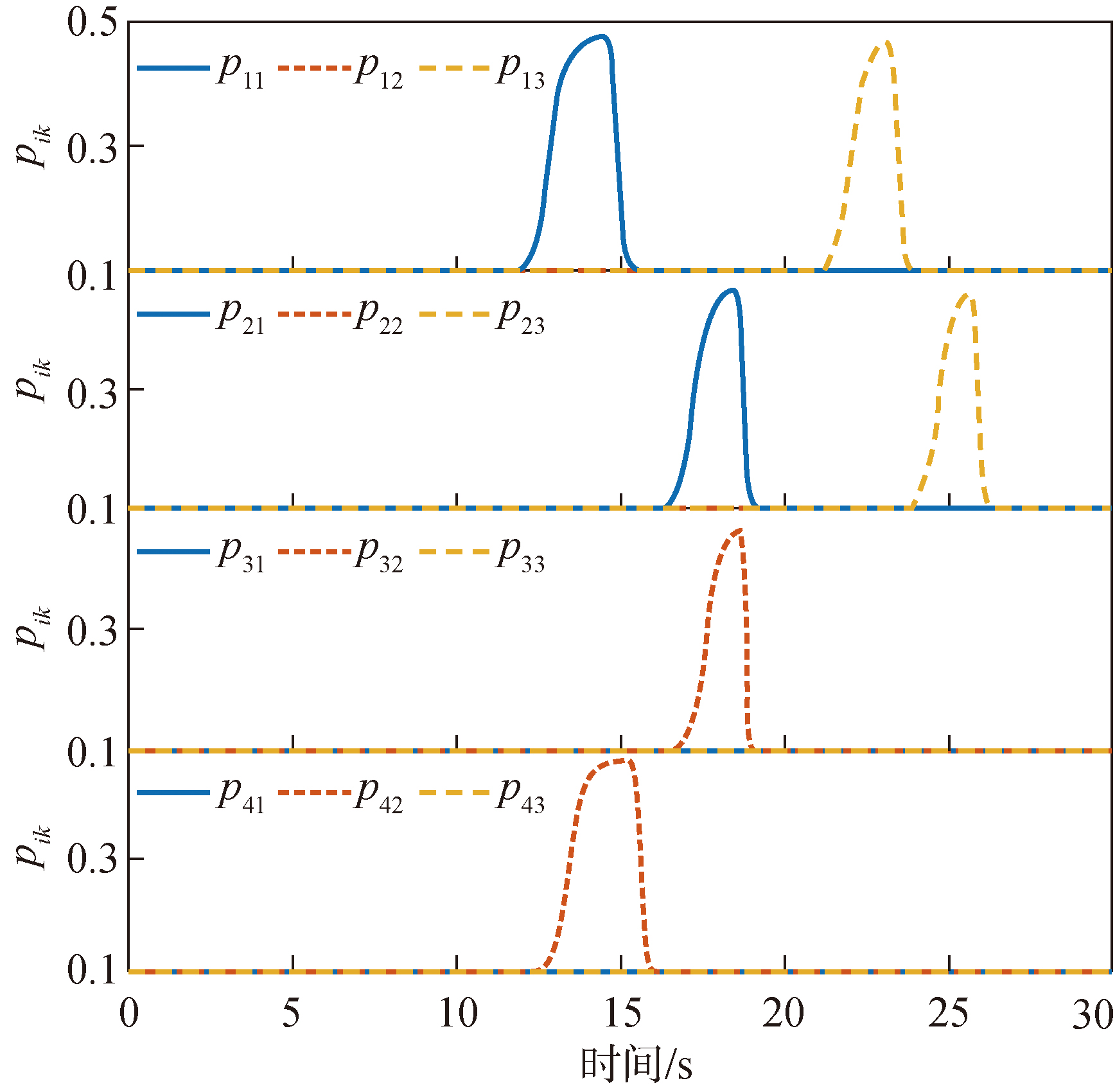
Fig.8 Class K function parameter values

Fig.9 UAV obstacle avoidance trajectories with different class K function parameters

Fig.10 Control inputs with different class K function parameters
| 方法 | 参数 | UAV1 | UAV2 | UAV3 | UAV4 |
|---|---|---|---|---|---|
| E-HOCBF方法 | p=0.1 | 4.33×103 | 1.21×104 | 1.40×104 | 3.70×103 |
| p=0.3 | 3.67×103 | 1.07×104 | 1.26×104 | 3.21×103 | |
| p=0.5 | 3.68×103 | 1.07×104 | 1.24×104 | 3.16×103 | |
| DPE-HOCBF 方法 | p=pik | 3.29×103 | 1.01×104 | 1.21×104 | 3.02×103 |
| APF方法 | 4.56×103 | 1.04×104 | 1.25×104 | 3.70×103 |
Table 1 The energy consumptions of different obstacle avoidance methods
| 方法 | 参数 | UAV1 | UAV2 | UAV3 | UAV4 |
|---|---|---|---|---|---|
| E-HOCBF方法 | p=0.1 | 4.33×103 | 1.21×104 | 1.40×104 | 3.70×103 |
| p=0.3 | 3.67×103 | 1.07×104 | 1.26×104 | 3.21×103 | |
| p=0.5 | 3.68×103 | 1.07×104 | 1.24×104 | 3.16×103 | |
| DPE-HOCBF 方法 | p=pik | 3.29×103 | 1.01×104 | 1.21×104 | 3.02×103 |
| APF方法 | 4.56×103 | 1.04×104 | 1.25×104 | 3.70×103 |
| 仿真条件 | 方法 | 跟踪误差/m | 平均仿真时间/s | |
|---|---|---|---|---|
| 无人机数量4、 障碍物数量3 | APF方法 | 0.7472 | 1.6062 | |
| DPE-HOCBF方法 | 0.5064 | 1.6282 | ||
| 无人机数量8、 障碍物数量6 | APF方法 | 0.9407 | 1.5856 | |
| DPE-HOCBF方法 | 0.6207 | 1.6078 | ||
Table 2 Tracking error and mean simulation time
| 仿真条件 | 方法 | 跟踪误差/m | 平均仿真时间/s | |
|---|---|---|---|---|
| 无人机数量4、 障碍物数量3 | APF方法 | 0.7472 | 1.6062 | |
| DPE-HOCBF方法 | 0.5064 | 1.6282 | ||
| 无人机数量8、 障碍物数量6 | APF方法 | 0.9407 | 1.5856 | |
| DPE-HOCBF方法 | 0.6207 | 1.6078 | ||
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.21629/JSEE.2019.03.16 |
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
杜宏宝, 王正杰, 唐礼喜, 等. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9):2814-2823.
doi: 10.12382/bgxb.2022.1002 |
|
doi: 10.12382/bgxb.2022.1002 |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot [J]. Acta Armamentarii, 2025, 46(2): 240183-. |
| [2] | CHEN Wenjie, CUI Xiaohong, WANG Binrui. Safety Optimal Tracking Control Algorithm and Robot Arm Simulation [J]. Acta Armamentarii, 2024, 45(8): 2688-2697. |
| [3] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [4] | WANG Wei, YU Zhichen, LIN Shiyao, YANG Jing, WANG Hong. Three-dimensional Leader-follower Cooperative Guidance Law for Maneuvering Targets [J]. Acta Armamentarii, 2024, 45(10): 3538-3554. |
| [5] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [6] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [7] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [8] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [9] | DU Hongbao, WANG Zhengjie, TANG Lixi, ZHANG Xiaoning. Control Barrier Function-based Control for Aircraft Avoidance and Guidance with Dynamic Obstacles [J]. Acta Armamentarii, 2023, 44(9): 2814-2823. |
| [10] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [11] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [12] | GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load [J]. Acta Armamentarii, 2023, 44(3): 736-747. |
| [13] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [14] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| [15] | YANG Gui-bing, LIAO Zi-li, MA Xiao-jun, LIU Chun-guang. A Study of Driving Force Optimal Control of Multi-wheel Independent Electric Drive Vehicle [J]. Acta Armamentarii, 2016, 37(1): 23-30. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||