
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (2): 240183-.doi: 10.12382/bgxb.2024.0183
Previous Articles Next Articles
XIE Jingshuo1, HAN Lijin1,2,*( ), LIU Hui1,2, REN Xiaolei1, HOU Hongyu1, SHANG Qingyi1
), LIU Hui1,2, REN Xiaolei1, HOU Hongyu1, SHANG Qingyi1
Received:2024-03-13
Online:2025-02-28
Contact:
HAN Lijin
CLC Number:
XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot[J]. Acta Armamentarii, 2025, 46(2): 240183-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Serial wheel-legged robot
| 参数 | 数值 |
|---|---|
| 整体质量m/kg | 65 |
| 大腿质量mh/kg | 3 |
| 小腿质量mk/kg | 2.5 |
| 车轮质量mw/kg | 2.5 |
| 大腿长度lh/m | 0.3 |
| 小腿长度lk/m | 0.3 |
Table 1 Main parameters of the system
| 参数 | 数值 |
|---|---|
| 整体质量m/kg | 65 |
| 大腿质量mh/kg | 3 |
| 小腿质量mk/kg | 2.5 |
| 车轮质量mw/kg | 2.5 |
| 大腿长度lh/m | 0.3 |
| 小腿长度lk/m | 0.3 |
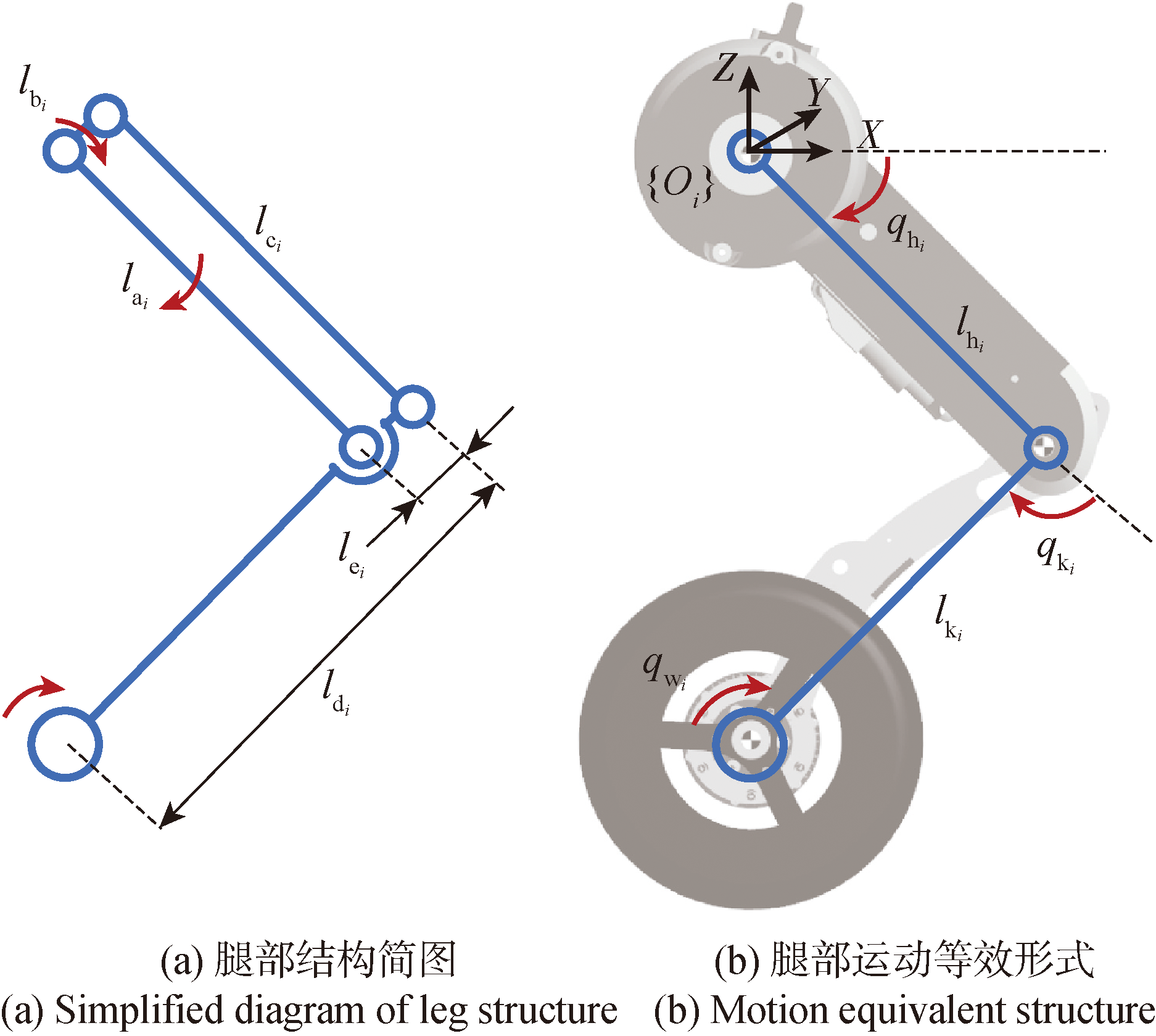
Fig.2 Schematic diagram of leg kinematics analysis

Fig.3 Coordinate system of wheel-legged robot

Fig.4 Motion control framework
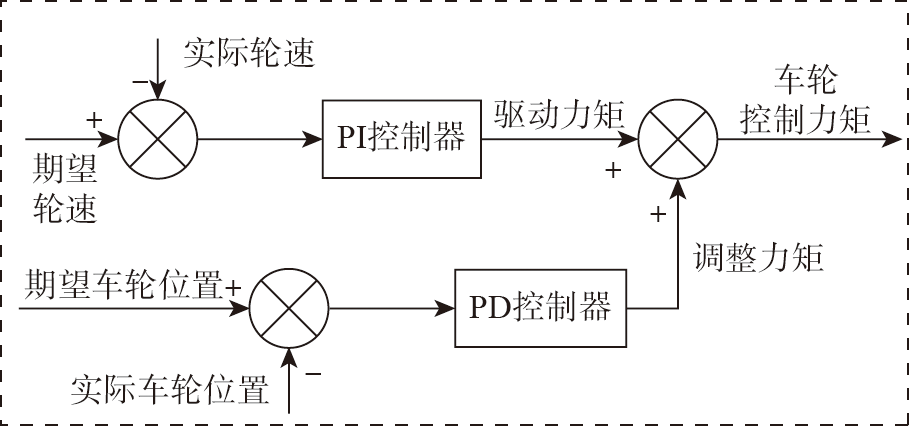
Fig.5 Wheel control strategy

Fig.6 Schematic diagram of assist torque effect

Fig.7 The slope estimation simulation scenes

Fig.8 The slope estimation simulation results
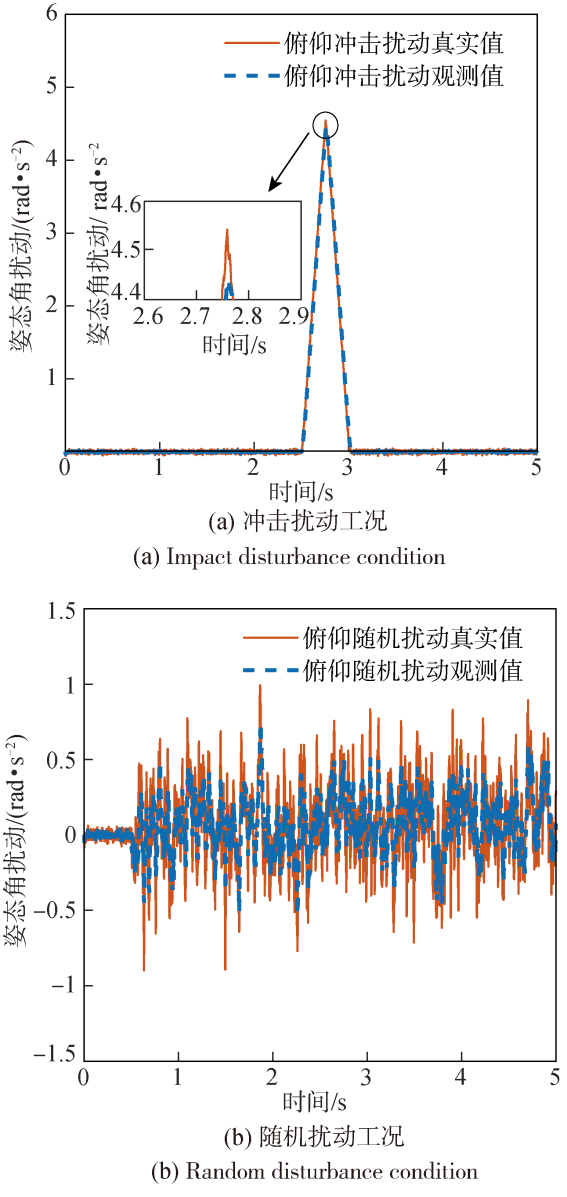
Fig.9 Simulated results of pitch disturbance observer

Fig.10 Simulated results of roll disturbance observer

Fig.11 The comparative simulation conditions
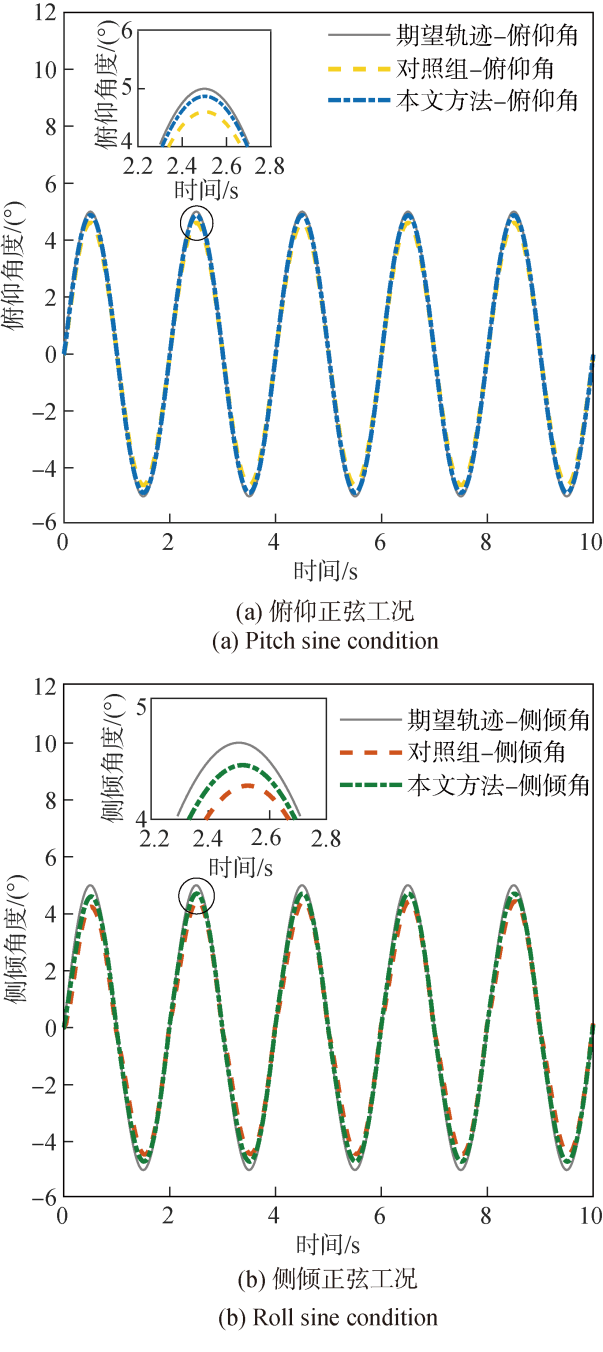
Fig.12 Attitude angles in sine signal simulation
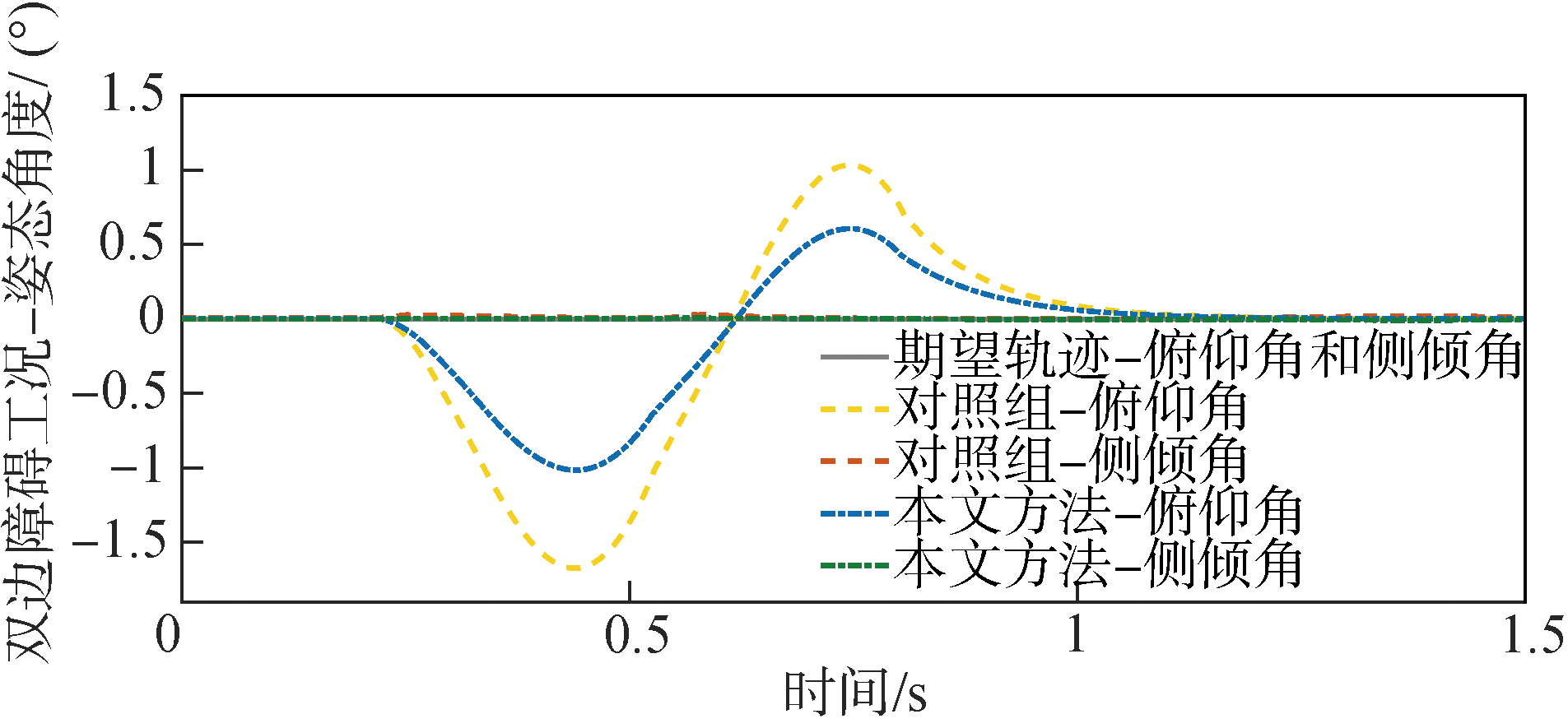
Fig.13 Attitude angles in bilateral handicap simulation
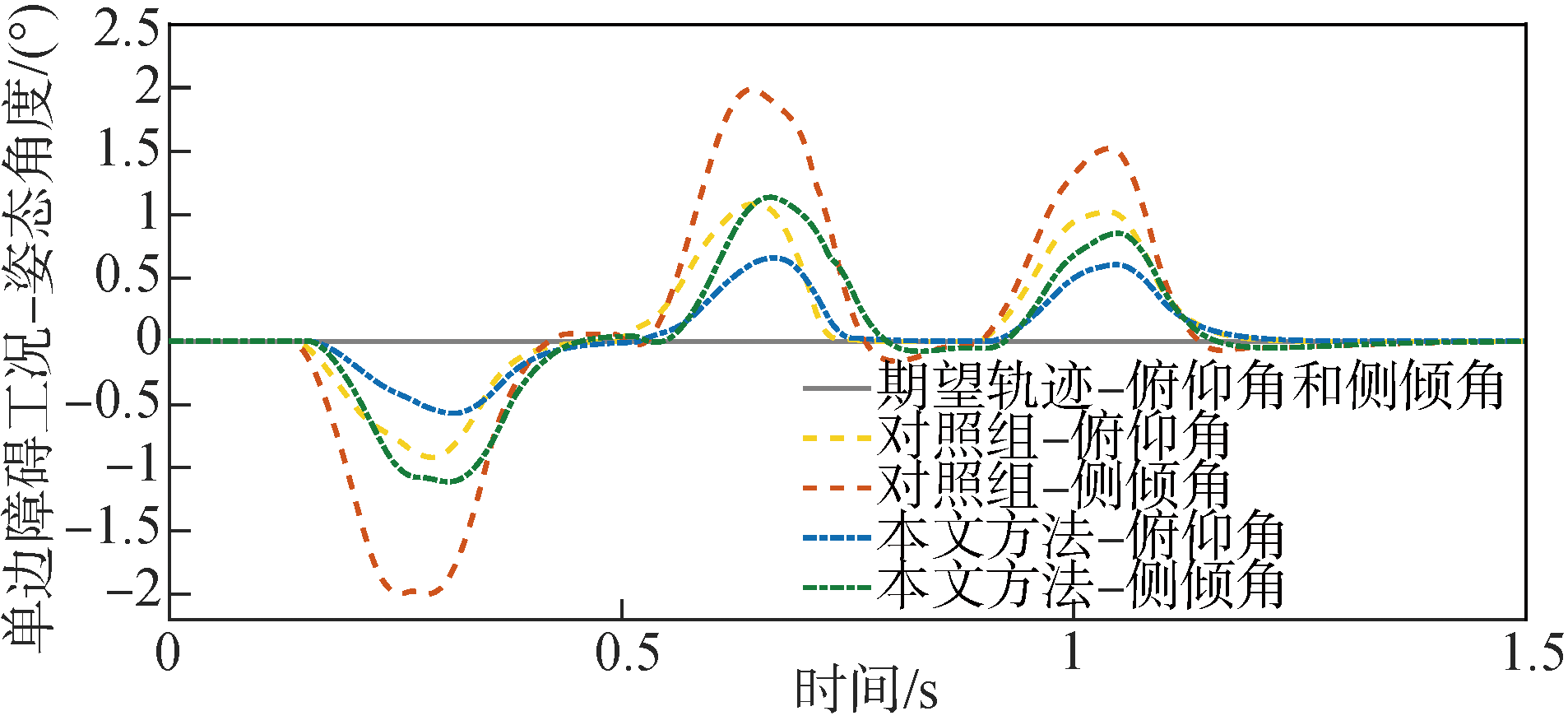
Fig.14 Attitude angles in unilateral obstacle simulation
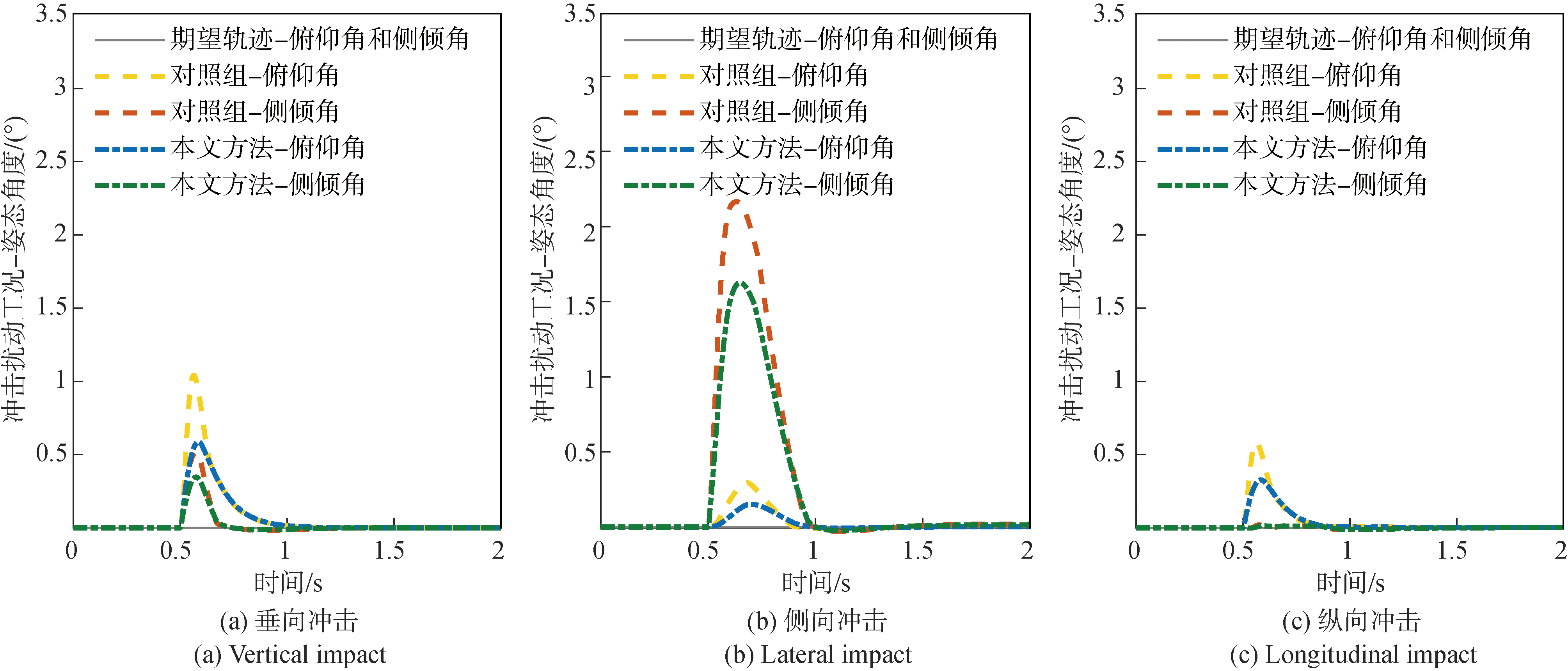
Fig.15 Attitude angles in impact disturbance simulation
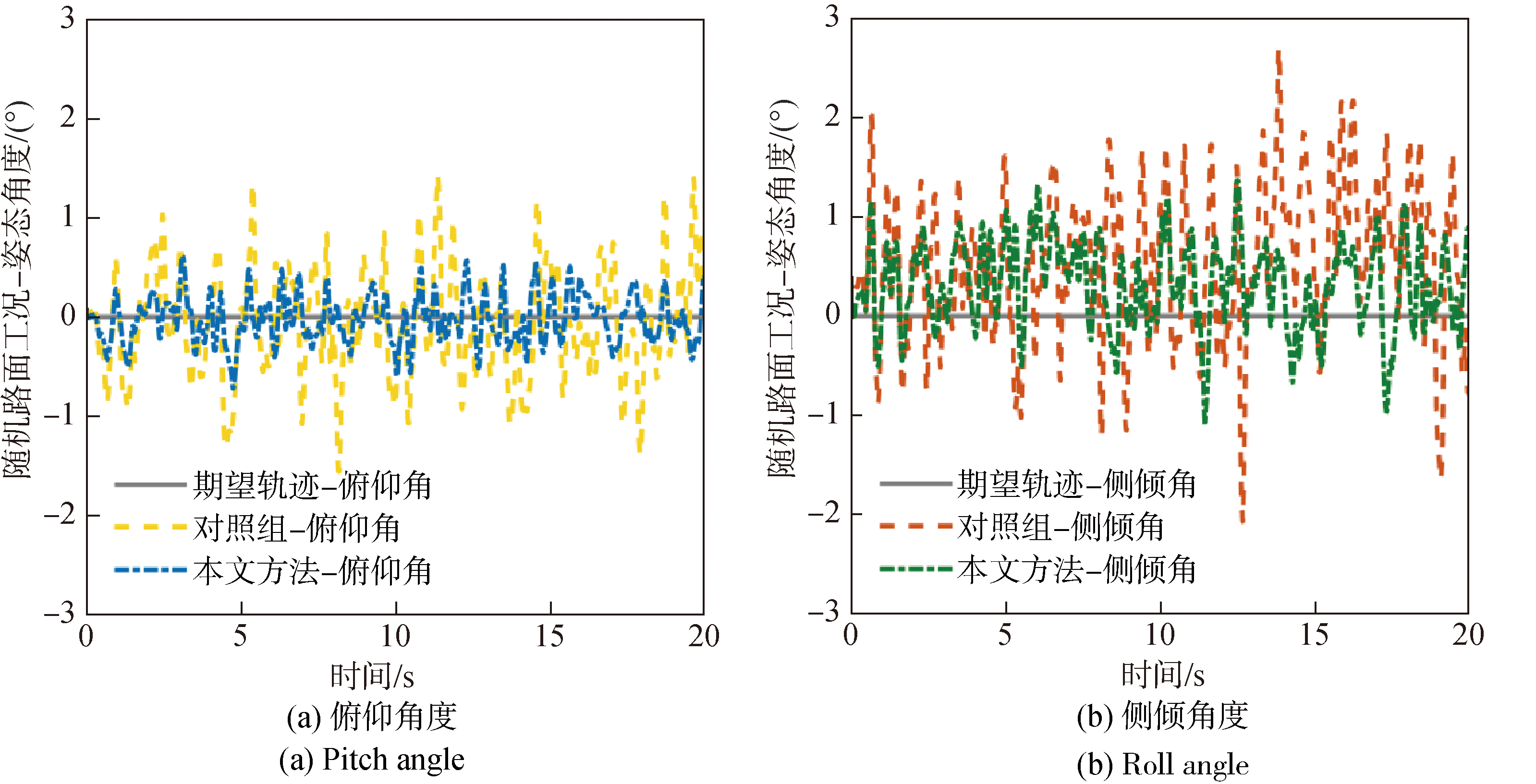
Fig.16 Attitude angles in random road surface simulation

Fig.17 Comparison of attitude angles RMSEs
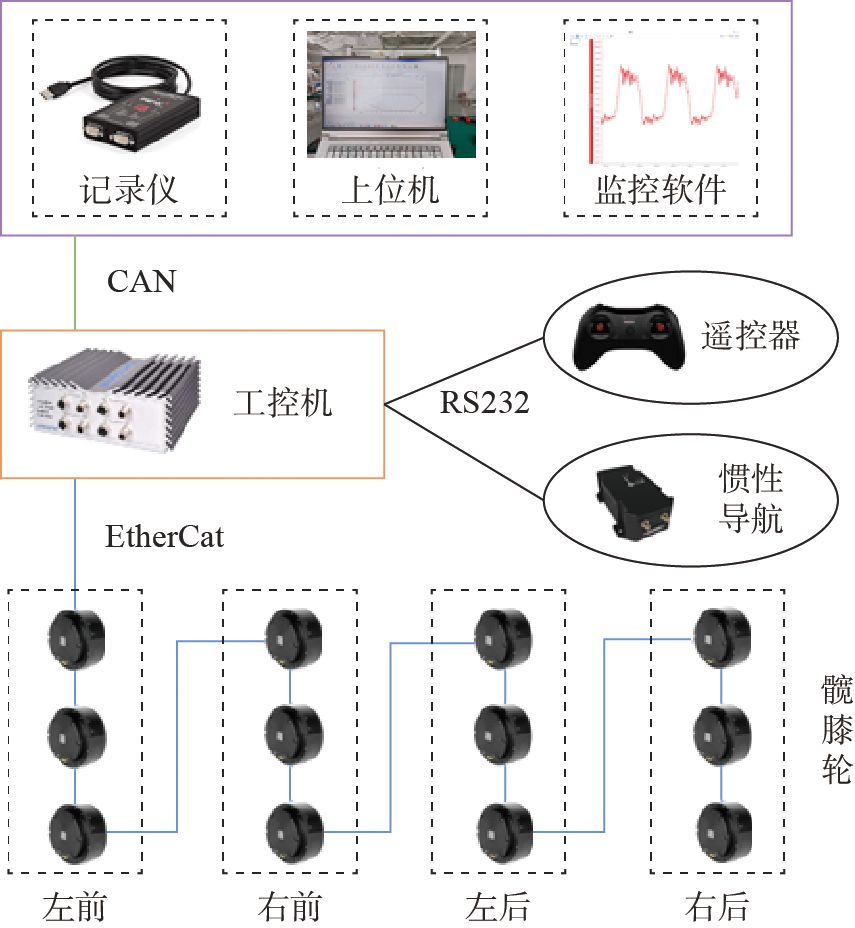
Fig.18 Communication architecture of wheel-legged robot control system

Fig.19 Pitch angle in attitude adjustment experiment
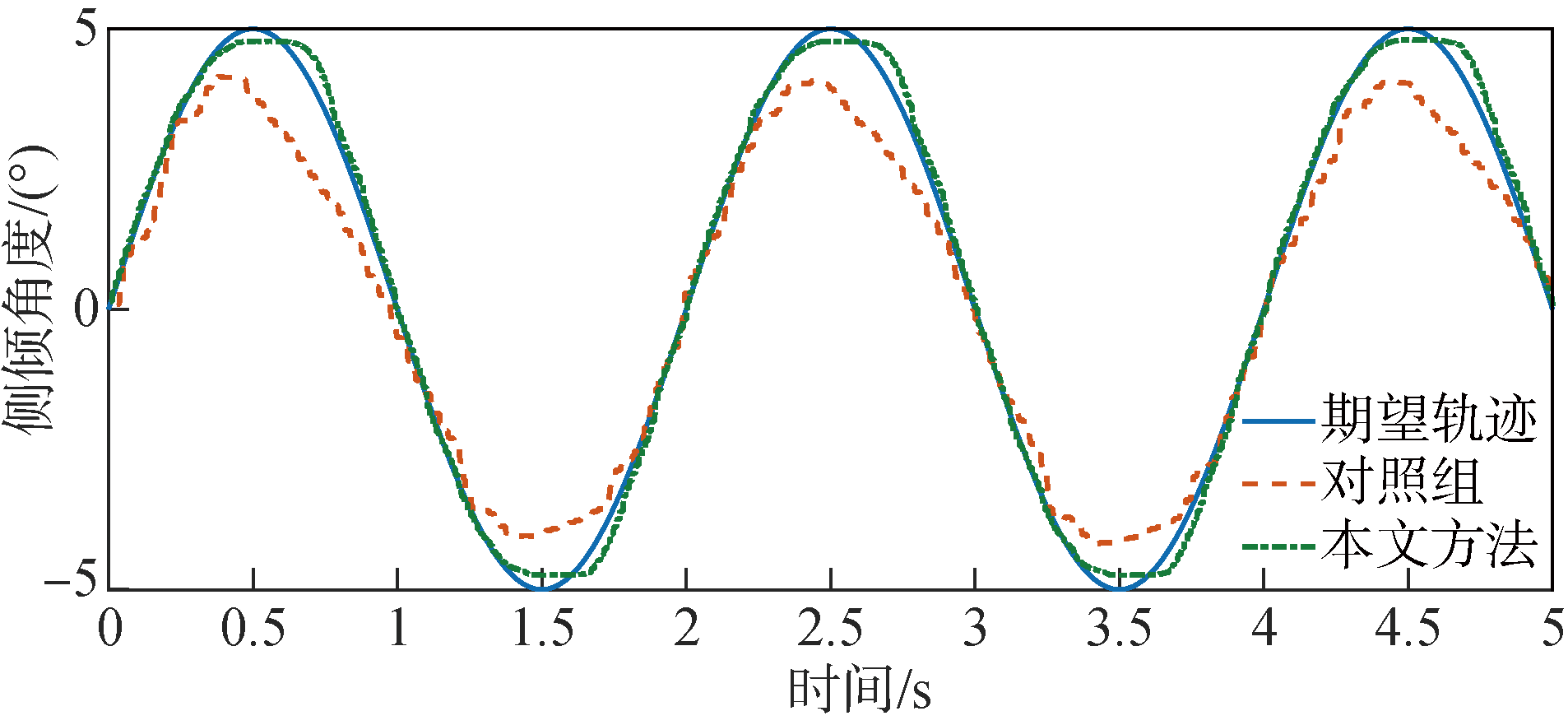
Fig.20 Roll angle in attitude adjustment experiment

Fig.21 The process of passing through the obstacles
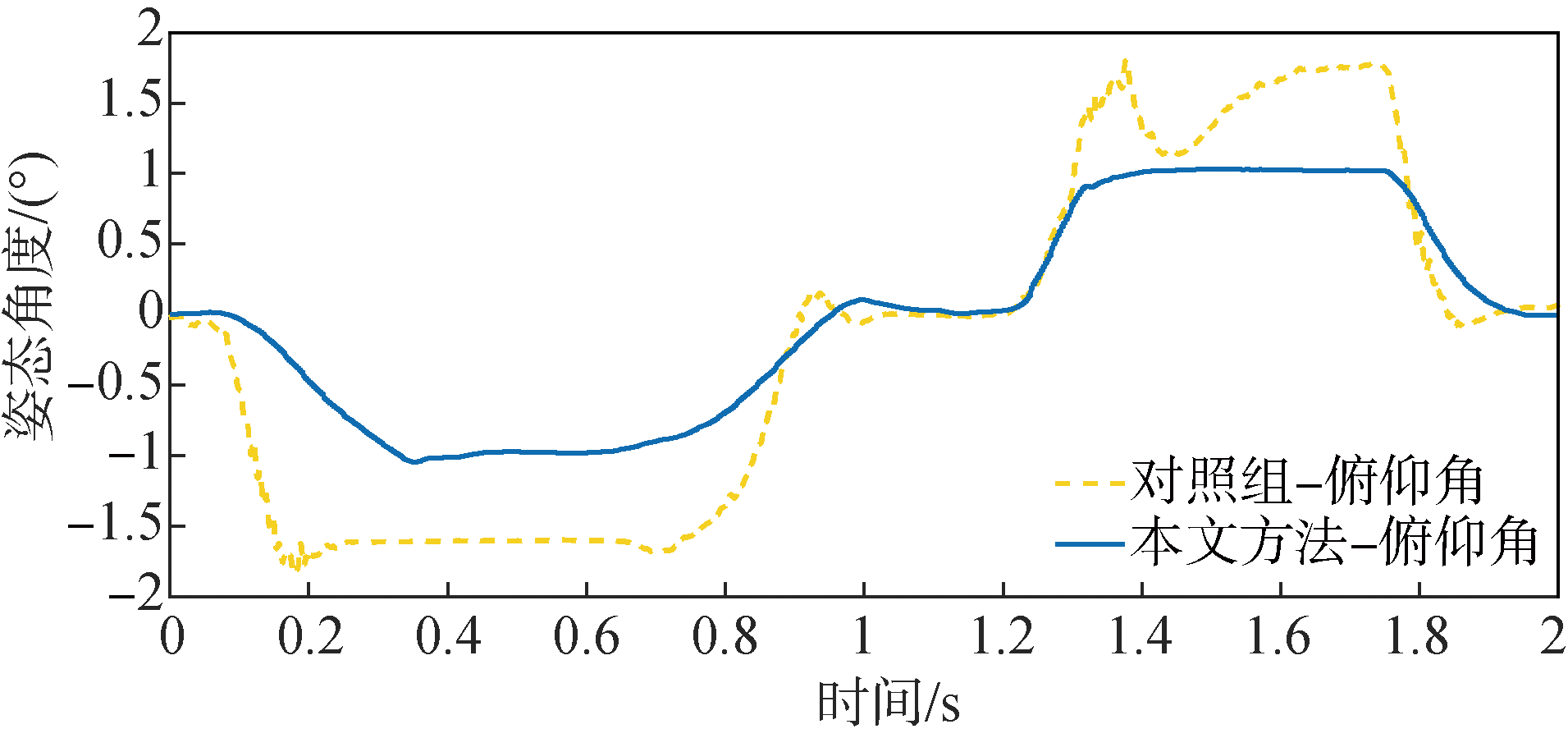
Fig.22 Attitude angles in bilateral handicap experiment

Fig.23 Attitude angles in unilateral obstacle experiment

Fig.24 Experiment for resistance to external vertical disturbance
Fig.25 Attitude angles in vertical disturbance experiment
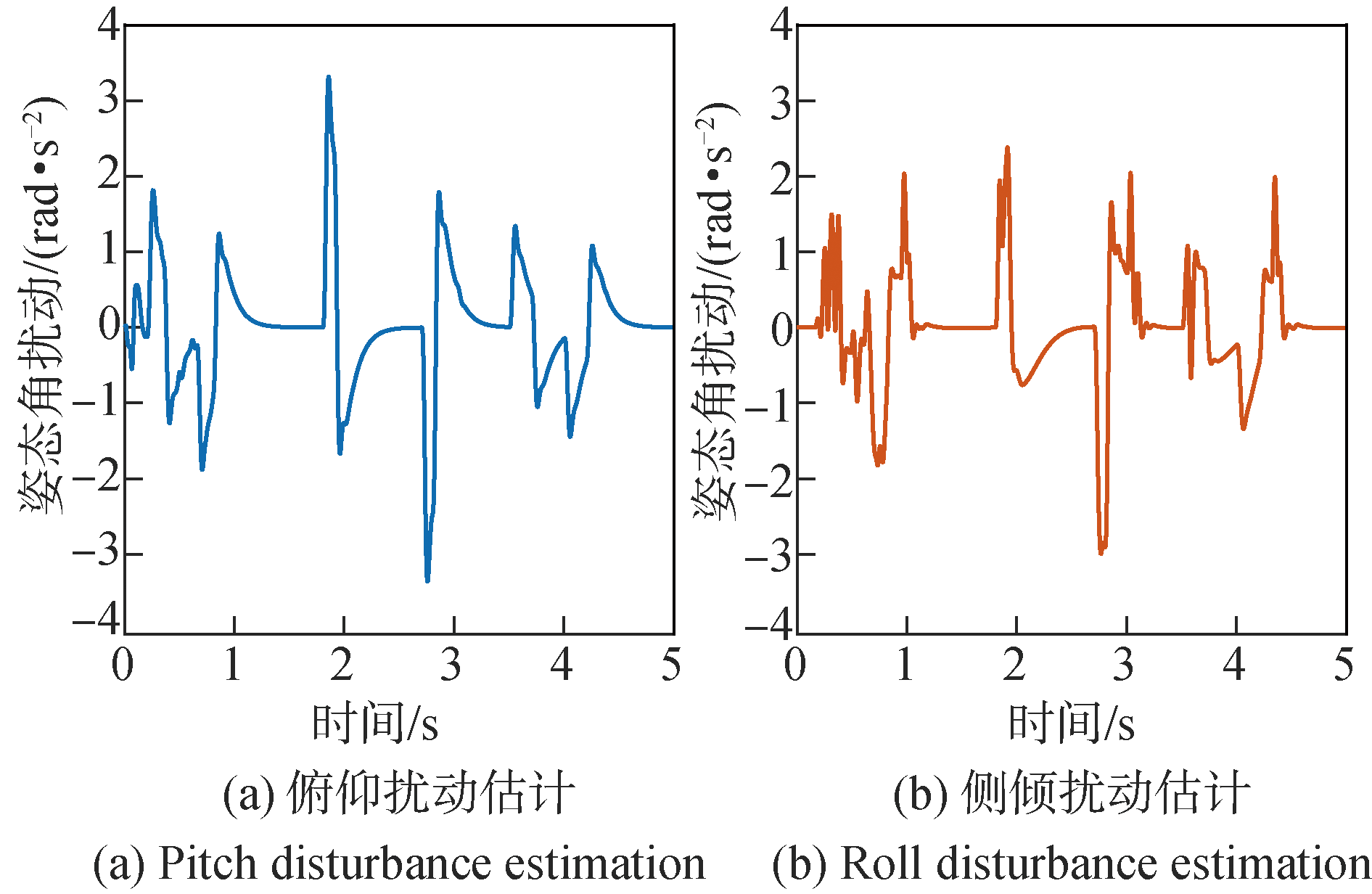
Fig.26 Disturbance estimation in vertical disturbance experiment

Fig.27 Experiment for resistance to external lateral disturbance
Fig.28 Attitude angles in lateral disturbance experiment
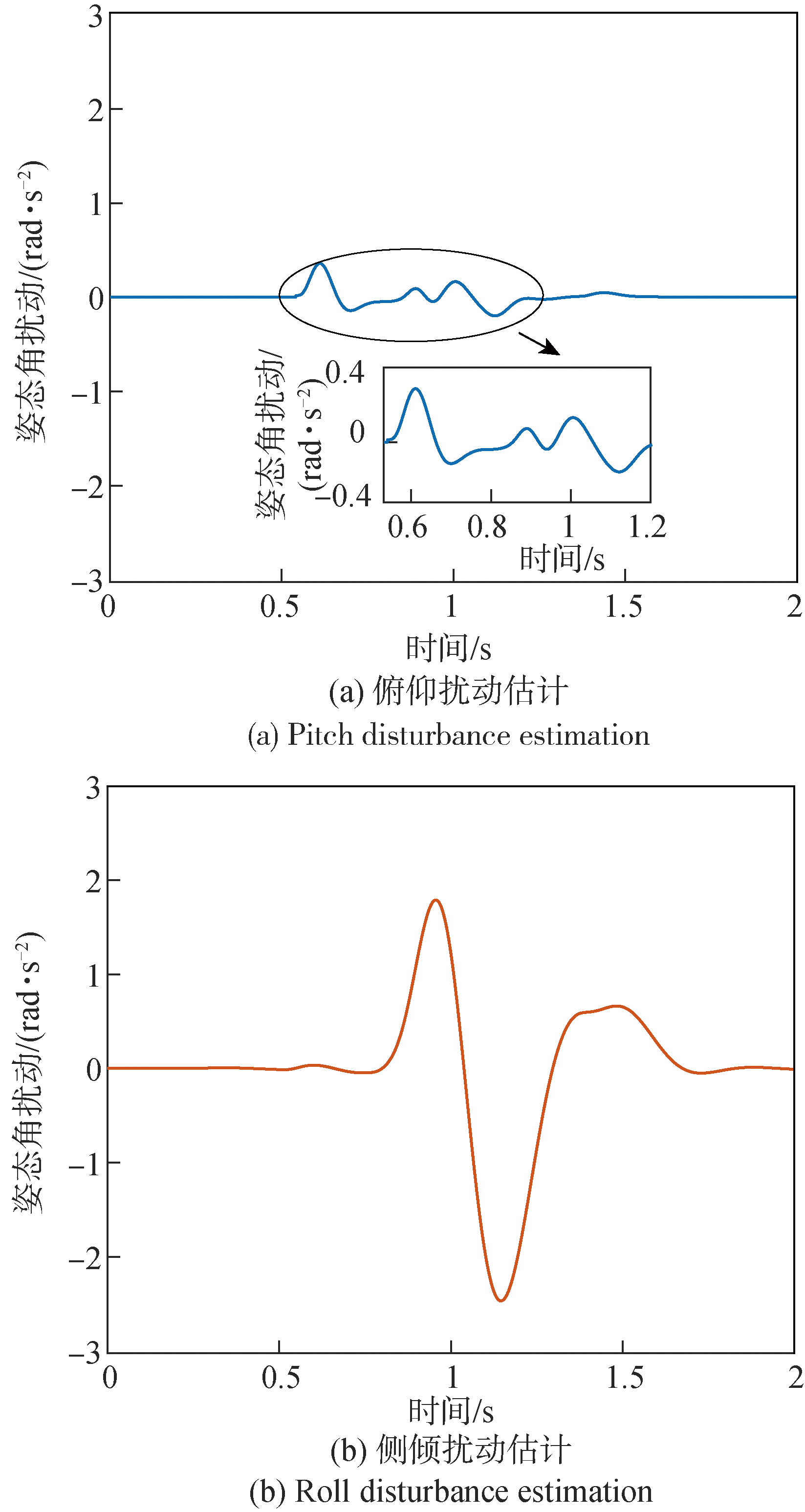
Fig.29 Disturbance estimation in lateral disturbance experiment

Fig.30 Experiment for resistance to external longitudinal disturbance
Fig.31 Attitude angles in longitudinal disturbance experiment
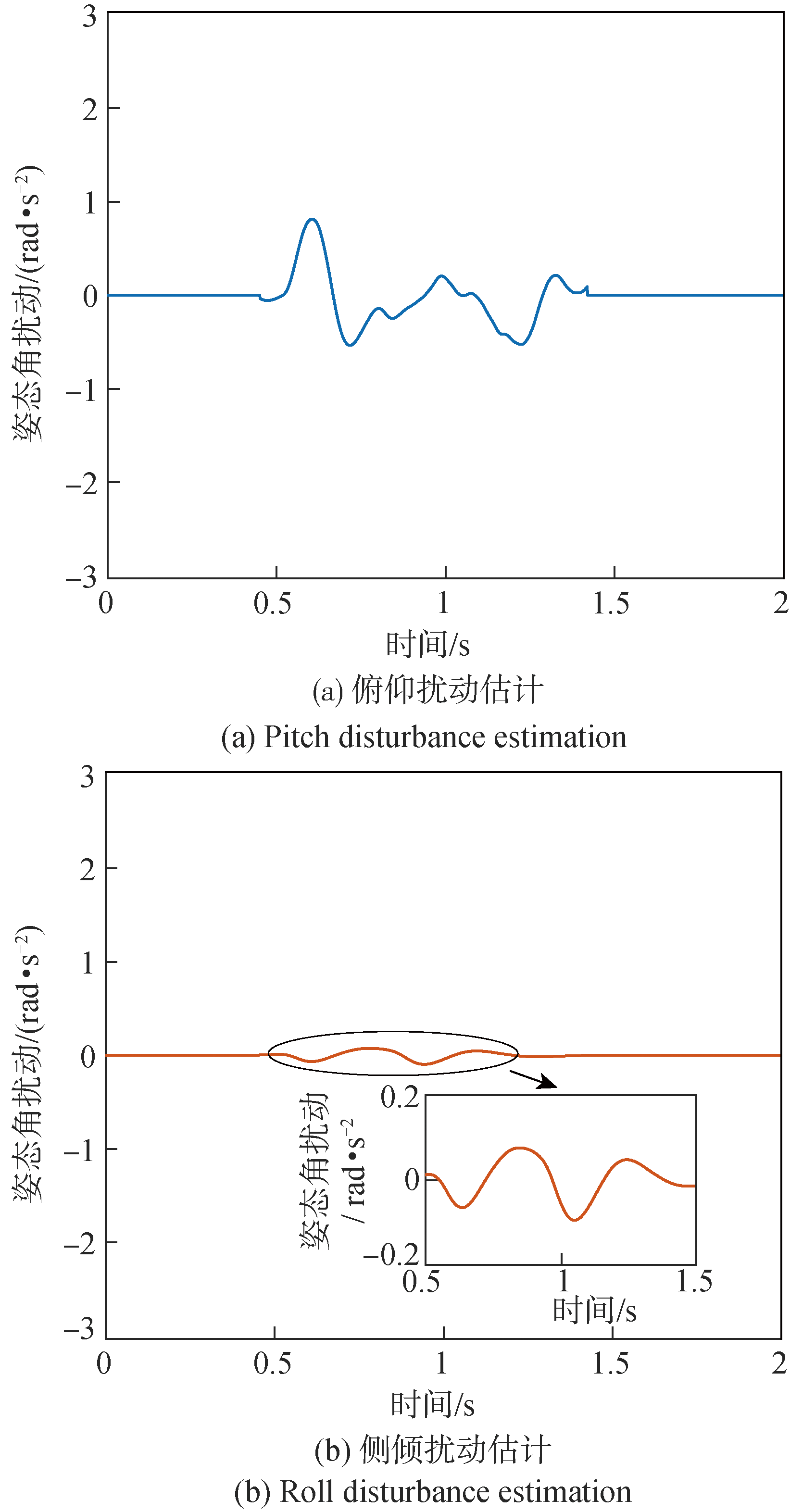
Fig.32 Disturbance estimation in longitudinal disturbance experiment
| [1] |
|
| [2] |
姜祎, 王挺, 邵沛瑶, 等. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1):247-259.
doi: 10.12382/bgxb.2022.0823 |
|
doi: 10.12382/bgxb.2022.0823 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1016/j.isatra.2020.08.033 pmid: 32950232 |
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
雷涛, 徐康, 汪首坤, 等. 并联六轮腿机器人机身平稳性控制方法研究[J]. 机械工程学报, 2021, 57(21):34-44.
doi: 10.3901/JME.2021.21.034 |
|
doi: 10.3901/JME.2021.21.034 |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [1] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [2] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [3] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [4] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [5] | LIU Hui, LIU Baoshuai, LIAO Dengting, HAN Lijin, CUI Shan. Adaptive Attitude Control of Wheel-legged Mobile Platform Based on Feedforward Compensation [J]. Acta Armamentarii, 2023, 44(9): 2756-2767. |
| [6] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [7] | GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load [J]. Acta Armamentarii, 2023, 44(3): 736-747. |
| [8] | GAO Quanxi, KE Wei, QIAO Haiyan. Underwater Vehicle Control Based on Linear Active Disturbance Rejection [J]. Acta Armamentarii, 2023, 44(3): 783-791. |
| [9] | WANG Jian-chen, QI Xiao-hui. Sensor Fault Estimation Method for Flight Control Systems Based on Aerodynamic Parameter Identification [J]. Acta Armamentarii, 2015, 36(1): 103-110. |
| [10] | ZHENG Ying, MA Da-wei, YAO Jian-yong, HU Jian. Active Disturbance Rejection Control for Position Servo System of Rocket Launcher [J]. Acta Armamentarii, 2014, 35(5): 597-603. |
| [11] | QI Xiao-hui, LI Jie, HAN Shuai-tao . Adaptive Active Disturbance Rejection Control and Its Simulation Based on BP Neural Network [J]. Acta Armamentarii, 2013, 34(6): 776-782. |
| [12] | CUI Nai-gang, BAI Yu-liang, CHANG Ya-wu, WANG Xiao-gang, XU Jiang-tao. Underwater Vehicle Control Method Based on Nonlinear Dynamic Inversion [J]. Acta Armamentarii, 2013, 34(4): 443-450. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||