
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (7): 1920-1929.doi: 10.12382/bgxb.2022.0106
Previous Articles Next Articles
WANG Zhilin1,2, WANG Jiang1,2, QI Qi3, FAN Shipeng1,2,*( )
)
Received:2022-02-23
Online:2023-07-30
Contact:
FAN Shipeng
WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO[J]. Acta Armamentarii, 2023, 44(7): 1920-1929.
Add to citation manager EndNote|Ris|BibTeX
| 参数 | 取值 |
|---|---|
| Clr | [0,200] |
| ωRR/(rad·s-1) | 2 |
| Kδ | [1000,3000] |
| ϕ | |
| 传感器阻尼ξg | 0.5 |
| 传感器带宽ωg/(rad·s-1) | 200 |
| δα | [-10°,10°] |
Table 1 Parameter of the roll channel dynamic model
| 参数 | 取值 |
|---|---|
| Clr | [0,200] |
| ωRR/(rad·s-1) | 2 |
| Kδ | [1000,3000] |
| ϕ | |
| 传感器阻尼ξg | 0.5 |
| 传感器带宽ωg/(rad·s-1) | 200 |
| δα | [-10°,10°] |
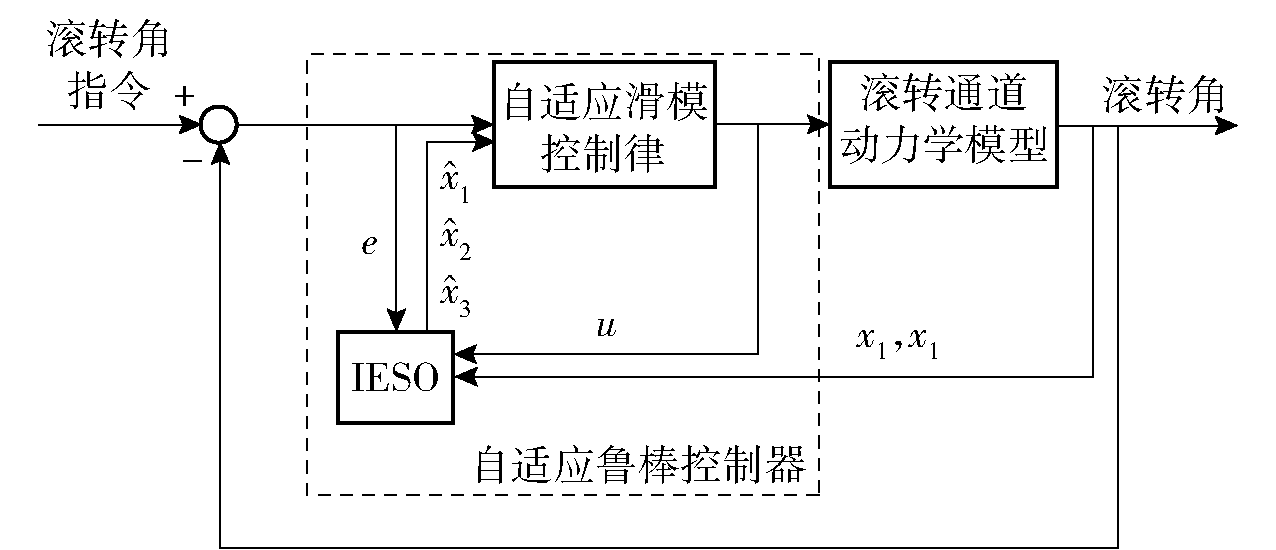
Fig.1 Schematic diagram of the controller
| 参数 | ka | kb | η | μ | Φ | ω0 |
|---|---|---|---|---|---|---|
| 数值 | 8 | 130 | 2 | 0.8 | 0.3 | 15 |
Table 2 Control parameter setting
| 参数 | ka | kb | η | μ | Φ | ω0 |
|---|---|---|---|---|---|---|
| 数值 | 8 | 130 | 2 | 0.8 | 0.3 | 15 |

Fig.2 Parameter changes of the roll channel

Fig.3 Simulation of roll channel control system under different flight conditions
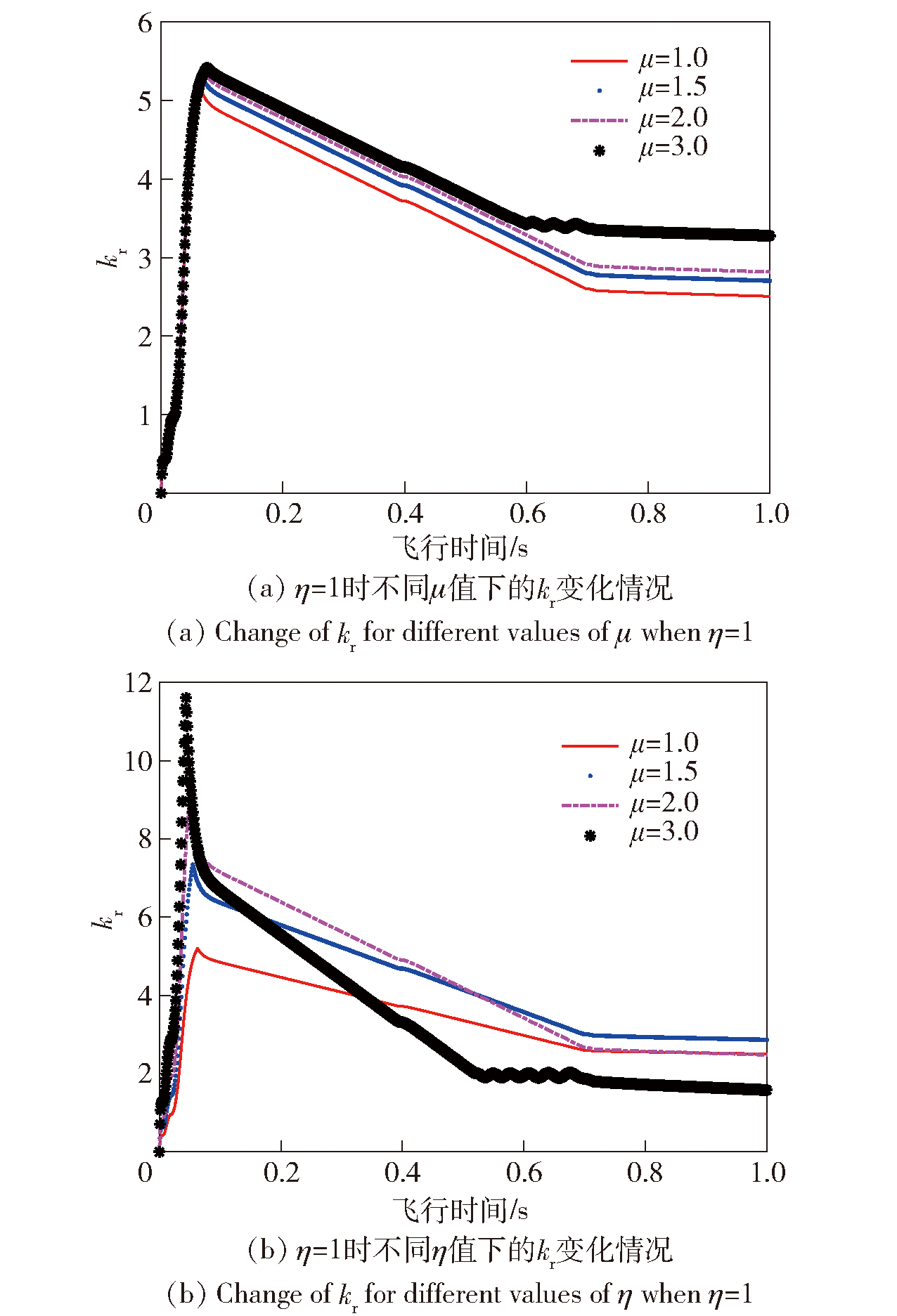
Fig.4 Adaptive parameter variation
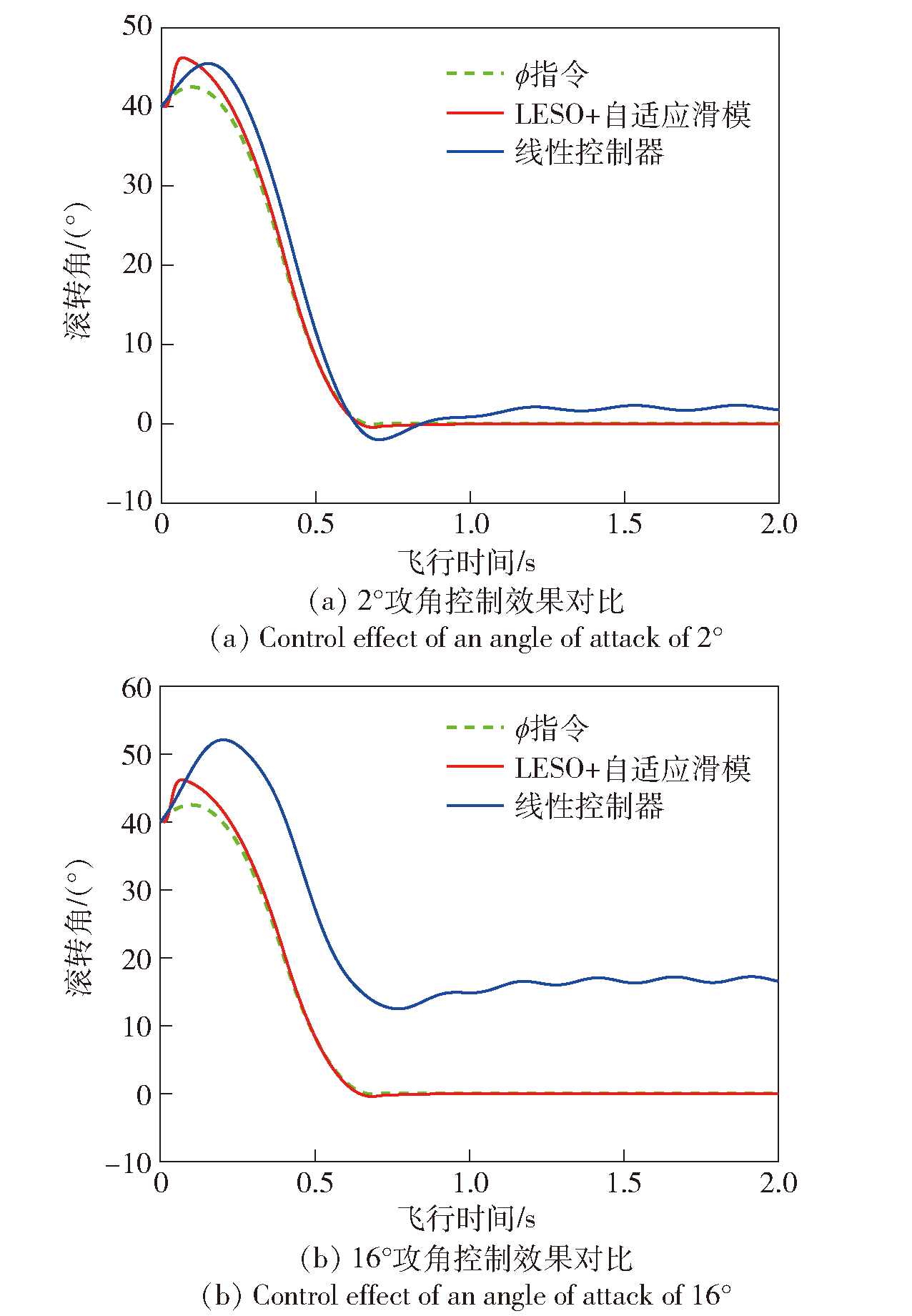
Fig.5 Control effect comparison at f=0.3
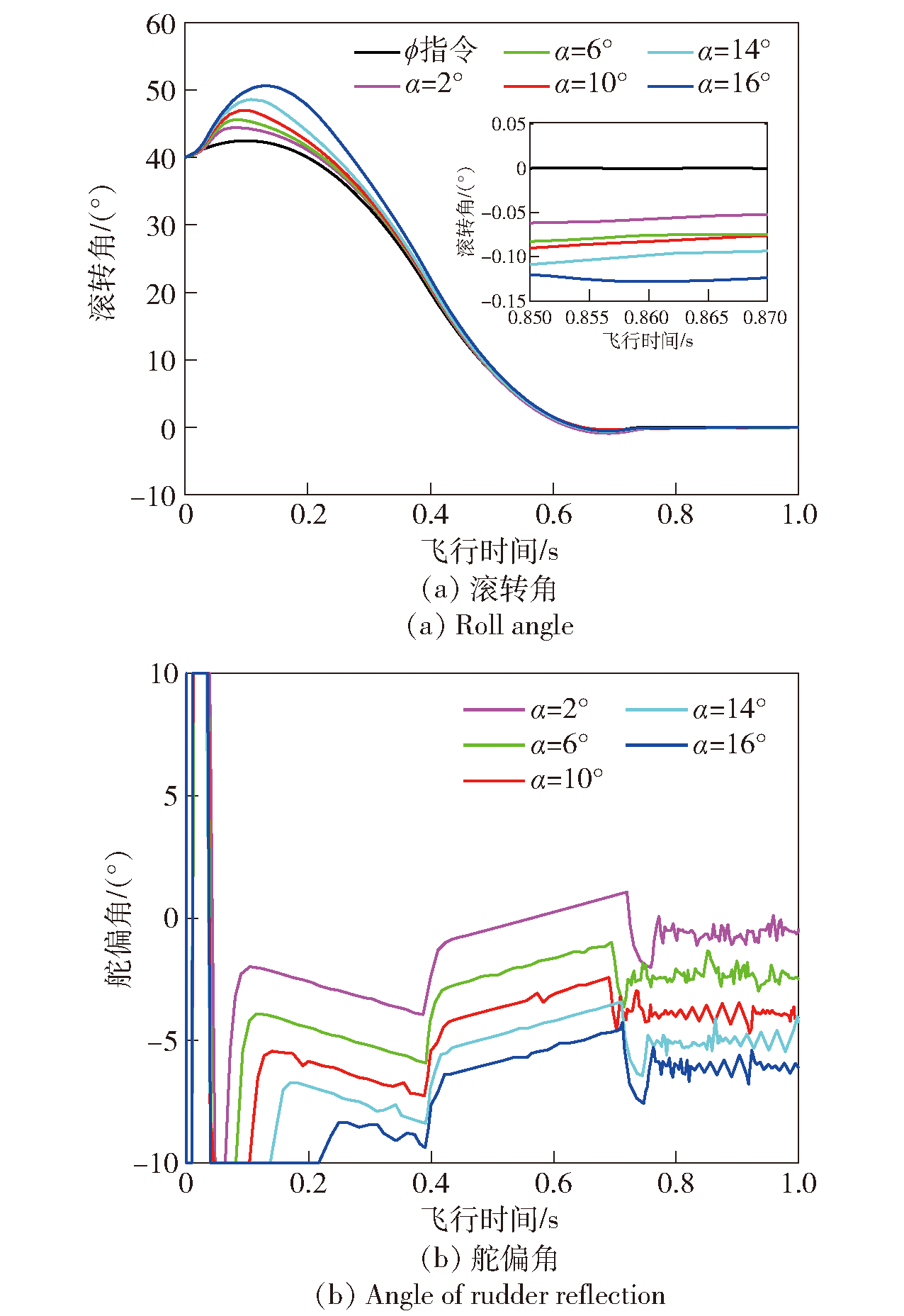
Fig.6 Simulation results at f=0.3
Fig.7 Simulation results at f=0.5

Fig.8 Simulation results at f=0.9
| [1] |
doi: 10.1177/0954410011418751 URL |
| [2] |
doi: 10.1109/TSMC.1979.4310116 URL |
| [3] |
doi: 10.2514/1.47212 URL |
| [4] |
doi: 10.1016/S0967-0661(02)00063-1 URL |
| [5] |
|
| [6] |
BUSEHEKH. Design and flight test of a robust autopilot for the IRIS-T air-to-air missile[J]. Control Engineering Practice, 2003, 11(5):551-558.
doi: 10.1016/S0967-0661(02)00063-1 URL |
| [7] |
doi: 10.2514/3.56084 URL |
| [8] |
|
| [9] |
doi: 10.1109/TIE.41 URL |
| [10] |
doi: 10.1002/rnc.v23.15 URL |
| [11] |
|
| [12] |
doi: 10.1109/TCST.2006.883186 URL |
| [13] |
doi: 10.23919/JSEE.2020.000078 |
| [14] |
|
| [15] |
doi: 10.1109/TAC.2004.834113 URL |
| [16] |
|
| [17] |
聂守成, 钱林方, 陈志群, 等. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制[J]. 兵工学报, 2020, 41(9): 1745-1751.
doi: 10.3969/j.issn.1000-1093.2020.09.006 |
|
doi: 10.3969/j.issn.1000-1093.2020.09.006 |
|
| [18] |
doi: 10.1109/TMECH.2004.839034 URL |
| [19] |
doi: 10.1109/TIE.2008.2011621 URL |
| [20] |
doi: 10.1016/j.ast.2021.107062 URL |
| [21] |
doi: 10.1016/j.ast.2021.107096 URL |
| [22] |
doi: 10.2514/1.50555 URL |
| [23] |
doi: 10.1109/TAES.2015.140057 |
| [24] |
韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3):13-18.
|
|
|
|
| [25] |
|
| [1] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [2] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [3] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [4] | GAO Yuxuan, HOU Yuanlong, GAO Qiang, HOU Runmin. Compound Control Method of ADRC and FNTSM for Airborne Object Tracking System [J]. Acta Armamentarii, 2023, 44(4): 1071-1085. |
| [5] | GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load [J]. Acta Armamentarii, 2023, 44(3): 736-747. |
| [6] | DONG Jinlu, MA Yuemeng, ZHOU Di, GONG Xiaogang, ZHANG Xi, SONG Jiahong. A Composite Sliding Mode Control Scheme Based on Reaction Jets and Flaps for Near-Space Hypersonic Vehicles [J]. Acta Armamentarii, 2023, 44(2): 496-506. |
| [7] | YOU Hao, CHANG Xinlong, ZHAO Jiufen, ZHANG Youhong, WANG Shunhong. Three-dimensional Leader-follower Cooperative Guidance Law with Impact Angle Constraints [J]. Acta Armamentarii, 2023, 44(11): 3369-3381. |
| [8] | ZENG Qing-han, MA Xiao-jun, LIAO Zi-li, WEI Shu-guang. Stable Steer Control of Electric Drive Tracked Vehicle Based on Equivalent Sliding Mode Technique with Conditional Integrator [J]. Acta Armamentarii, 2016, 37(8): 1351-1358. |
| [9] | CHEN Chen, MA Guang-fu, SUN Yan-chao, LI Chuan-jiang. Recursive Sliding Mode Control for Hypersonic Vehicle Based on Nonlinear Disturbance Observer [J]. Acta Armamentarii, 2016, 37(5): 840-850. |
| [10] | HUANG Da-shan, ZHANG Jin-qiu, LIU Yi-le, ZHANG Jian. Research on Sliding Mode Control and Energy Management Strategy of Energy-regenerative Suspension System of Vehicle [J]. Acta Armamentarii, 2016, 37(12): 2185-2195. |
| [11] | YANG Jing, SHI Jin-guang, LI Xiao-yuan, WANG Zhong-yuan, CHANG Si-jiang. Integrated Autopilot Guidanceand Control Design Based on 2-order Sliding Mode for Extended Range Guided Projectiles [J]. Acta Armamentarii, 2016, 37(12): 2251-2258. |
| [12] | LI Liang, LI Feng, FENG Yong-bao, YAO Xiao-guang. Research on Control Strategy of Large Hydraulic Erecting System Based on Adaptive Fuzzy Sliding Mode [J]. Acta Armamentarii, 2016, 37(1): 71-76. |
| [13] | YUAN Lei, LIU Wei-ping, LIU Xi-xia. Design of Sliding Mode Controller for All-wheel Steering System of Three-axle Vehicle [J]. Acta Armamentarii, 2015, 36(8): 1391-1397. |
| [14] | XIE Zheng, XIE Jian, DU Wen-zheng, LI Liang, GUO Yang. Sliding Mode Control for Hydraulic Erecting System of Large Launcher [J]. Acta Armamentarii, 2015, 36(4): 674-680. |
| [15] | ZOU Xin-guang, ZHOU Di, DU Run-le, LIU Jia-qi. Active Defense Nonsingular Terminal Sliding Mode Cooperative Guidance Law [J]. Acta Armamentarii, 2015, 36(3): 475-483. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||