
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2802-2813.doi: 10.12382/bgxb.2022.1051
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
YANG Jiaxiu, LI Xinkai*( ), ZHANG Hongli, WANG Hao
), ZHANG Hongli, WANG Hao
Received:2022-11-12
Online:2023-04-17
Contact:
LI Xinkai
CLC Number:
YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning[J]. Acta Armamentarii, 2023, 44(9): 2802-2813.

Fig.1 Quadrotor UAV model

Fig.2 Flowchart of Algorithm 2

Fig.3 Control block diagram of the system based on the actor-critic structure

Fig.4 Algorithm 2 pseudo-code for online implementation based on neural networks
| 参数 | 标称值 | 参数 | 标称值 |
|---|---|---|---|
| bx | 8 | a1x,a2x | 0 |
| by | 4.2 | a4x,a5x | 0 |
| bψ | 3.5 | a1y,a2y | 0 |
| bz | 9.5 | a4y,a5y | 0 |
| a3x | 9.8 | a1ψ,a2ψ | 0 |
| a3y | 9.8 | a1z,a2z | 0 |
Table 1 Nominal parameters of the quadrotor UAV model
| 参数 | 标称值 | 参数 | 标称值 |
|---|---|---|---|
| bx | 8 | a1x,a2x | 0 |
| by | 4.2 | a4x,a5x | 0 |
| bψ | 3.5 | a1y,a2y | 0 |
| bz | 9.5 | a4y,a5y | 0 |
| a3x | 9.8 | a1ψ,a2ψ | 0 |
| a3y | 9.8 | a1z,a2z | 0 |

Fig.5 Convergence of weights of NNs in Case 1

Fig.6 3-D tracking trajectory of the UAV during IRL learning in Case 1

Fig.7 Position tracking during IRL learning Case 1

Fig.8 Attitude response during IRL learning in Case 1

Fig.9 Control inputs for the four subsystems of the UAV during IRL learning in Case 1

Fig.10 Convergence of weights of NNs in Case 2
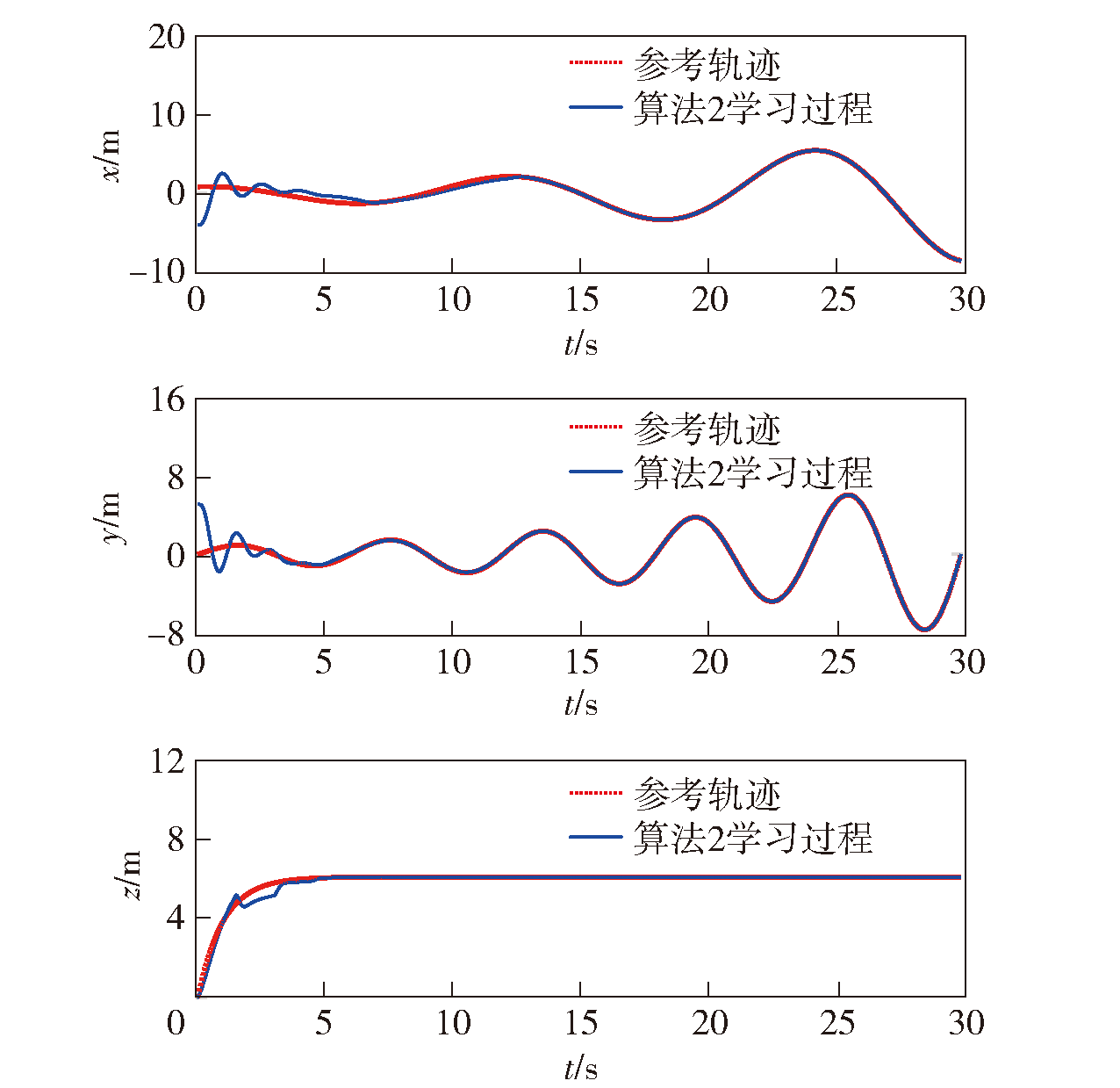
Fig.11 Position tracking during IRL learning Case 2

Fig.12 Attitude response during IRL learning in Case 2

Fig.13 Control inputs for the four subsystems of the UAV during IRL learning in Case 2

Fig.14 3-D tracking trajectory of the UAV in Case 2

Fig.15 Tracking errors of the four subsystems of a quadrotor UAV in Case 2
| [1] |
doi: 10.1016/j.trd.2017.02.017 URL |
| [2] |
doi: 10.1016/j.neucom.2014.09.077 URL |
| [3] |
梁文勇, 吴大伟, 谷山强, 等. 输电线路多旋翼无人机精细化自主巡检航迹优化方法[J]. 高电压技术, 2020, 46(9): 3054-3061.
|
|
|
|
| [4] |
王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289.
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
|
|
| [5] |
|
| [6] |
doi: 10.1049/cth2.v13.12 URL |
| [7] |
doi: 10.1016/j.jfranklin.2020.04.056 URL |
| [8] |
赵振华, 肖亮, 姜斌, 等. 基于扩张状态观测器的四旋翼无人机快速非奇异终端滑模轨迹跟踪控制[J]. 控制与决策, 2022, 37(9): 2201-2210.
|
|
|
|
| [9] |
修杨, 邓宏彬, 危怡然, 等. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938.
|
|
doi: 10.12382/bgxb.2021.0444 |
|
| [10] |
李俊芳, 李峰, 吉月辉, 等. 四旋翼无人机轨迹稳定跟踪控制[J]. 控制与决策, 2020, 35(2): 349-356.
|
|
|
|
| [11] |
武晓晶, 韩欣芮, 吴学礼, 等. 动力学参数未知的四旋翼无人机预定性能控制[J/OL]. 北京航空航天大学学报, (2022-04-08) [2022-11-10]. https://doi.org/10.13700/j.bh.10-01-5965.2021.0714.
|
|
|
|
| [12] |
沈智鹏, 曹晓明. 输入受限四旋翼飞行器的模糊自适应动态面轨迹跟踪控制[J]. 控制与决策, 2019, 34(7): 1401-1408.
|
|
|
|
| [13] |
doi: 10.1109/MCI.2009.932261 URL |
| [14] |
doi: 10.1016/j.automatica.2012.06.096 URL |
| [15] |
doi: 10.1109/TAC.9 URL |
| [16] |
doi: 10.1109/TCST.87 URL |
| [17] |
庞文砚, 范家璐, 姜艺, 等. 基于强化学习的部分线性离散时间系统的最优输出调节[J]. 自动化学报, 2022, 48(9): 2242-2253.
|
|
|
|
| [18] |
|
| [19] |
罗傲, 肖文彬, 周琪, 等. 基于强化学习的一类具有输入约束非线性系统最优控制[J]. 控制理论与应用, 2022, 39(1): 154-164.
|
|
|
|
| [20] |
袁兆麟, 何润姿, 姚超, 等. 基于强化学习的浓密机底流浓度在线控制算法[J]. 自动化学报, 2021, 47(7): 1558-1571.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1016/S0167-6911(00)00004-9 URL |
| [23] |
doi: S0019-0578(18)30096-X pmid: 29550063 |
| [24] |
doi: 10.1109/TNNLS.2015.2441749 URL |
| [25] |
doi: 10.1016/j.automatica.2004.11.034 URL |
| [1] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [2] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| [3] | YANG Gui-bing, LIAO Zi-li, MA Xiao-jun, LIU Chun-guang. A Study of Driving Force Optimal Control of Multi-wheel Independent Electric Drive Vehicle [J]. Acta Armamentarii, 2016, 37(1): 23-30. |
| [4] | CHEN Qi, WANG Zhong-yuan, CHANG Si-jiang. Optimal Guidance Law with Impact Angle Constraints Based on Indirect Gauss Pseudospectral Method [J]. Acta Armamentarii, 2015, 36(7): 1203-1212. |
| [5] | ZHANG Meng-ying, TANG Qian-gang, HAN Xiao-jun, ZHANG Qing-bin, GE Jian-quan. Iterative Method to Solving Re-entry Trajectory Optimization with Complex Constraints [J]. Acta Armamentarii, 2015, 36(6): 1015-1023. |
| [6] | WANG Hui, LIN De-fu, QI Zai-kang, ZHANG Di. Analysis and Application Study on the Extended Trajectory Shaping Guidance Law [J]. Acta Armamentarii, 2013, 34(7): 801-809. |
| [7] | LIU Li-dong, ZHANG Yu-wen. Buoyancy Compensation-based Optimal Control of UUV Low-speed State [J]. Acta Armamentarii, 2013, 34(5): 644-648. |
| [8] | LIU Wei-dong, YANG Jian-hua,LI Le , LI Xiang-yu. Design of Network Control System Based on the Control Performance Optimization [J]. Acta Armamentarii, 2013, 34(11): 1484-1488. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 319
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 321
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||