
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (7): 2182-2196.doi: 10.12382/bgxb.2023.0404
Previous Articles Next Articles
ZHAO Xinyun, YU Jianqiao*( )
)
Received:2023-05-09
Online:2023-07-24
Contact:
YU Jianqiao
CLC Number:
ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile[J]. Acta Armamentarii, 2024, 45(7): 2182-2196.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Configuration of traditional agile projectile
Fig.2 Heading reversal maneuver of traditional agile projectile
Fig.3 Configuration of novel agile projectile
Fig.4 Heading reversal maneuver of novel agile projectile
Fig.5 Force analysis diagram of novel agile projectile
Fig.6 Schematic diagram of control system
Fig.7 Projectile flight envelope
| 传统、新型与 效果 | tsim/ s | EuR/ (N·s) | EuT/ (N·s) | Etotal/ (N·s) |
|---|---|---|---|---|
| 传统 | 2.31 | 3732.78 | 40567.50 | 44300.28 |
| 新型 | 2.00 | 13440.31 | 24952.50 | 38392.81 |
| 效果 | -13.27% | 260.06% | -38.49% | -13.34% |
Table 1 Time and energy consumption
| 传统、新型与 效果 | tsim/ s | EuR/ (N·s) | EuT/ (N·s) | Etotal/ (N·s) |
|---|---|---|---|---|
| 传统 | 2.31 | 3732.78 | 40567.50 | 44300.28 |
| 新型 | 2.00 | 13440.31 | 24952.50 | 38392.81 |
| 效果 | -13.27% | 260.06% | -38.49% | -13.34% |
Fig.8 Curves of trajectory
Fig.9 Curves of pitch angle, attack of angle and flight path angle
Fig.10 Curves of pitch angular velocity
Fig.11 Curves of normal acceleration
Fig.12 Curves of flight path angular velocity
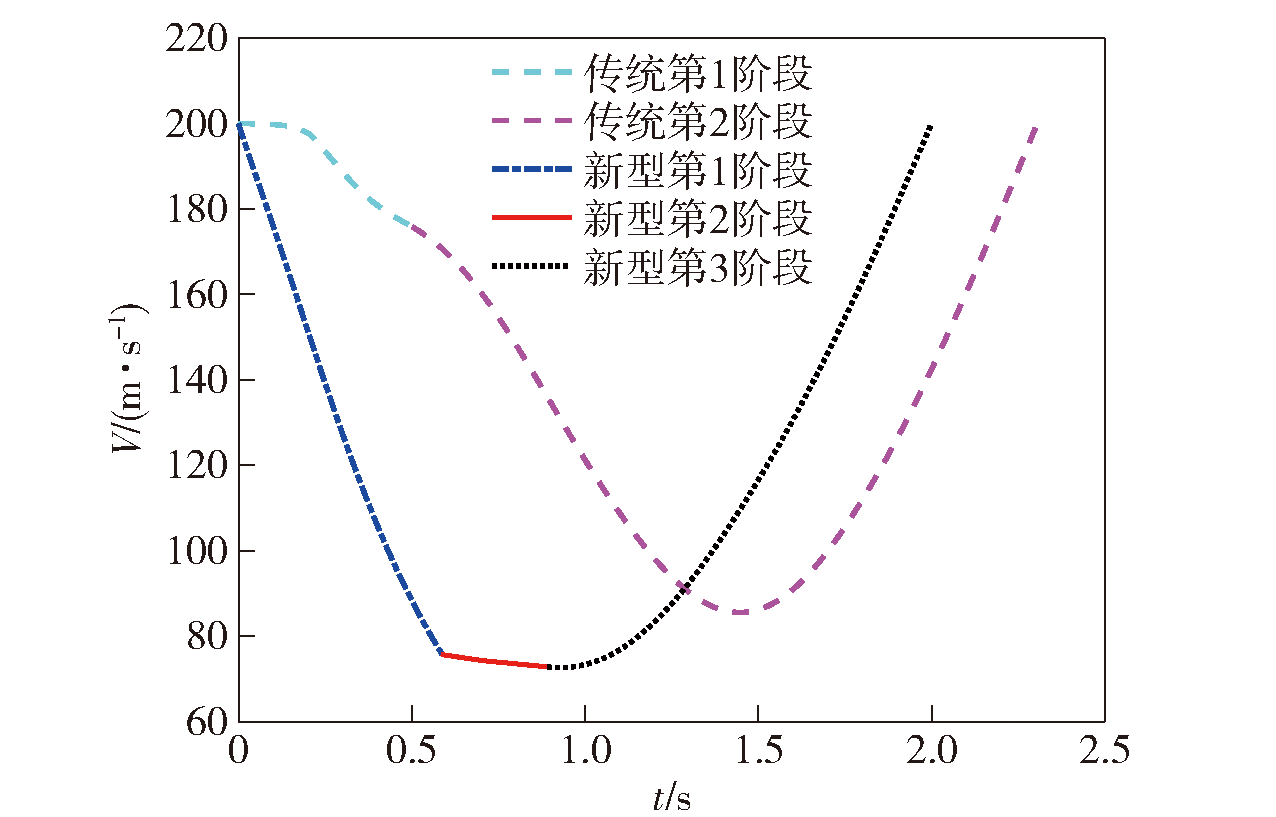
Fig.13 Curves of velocity
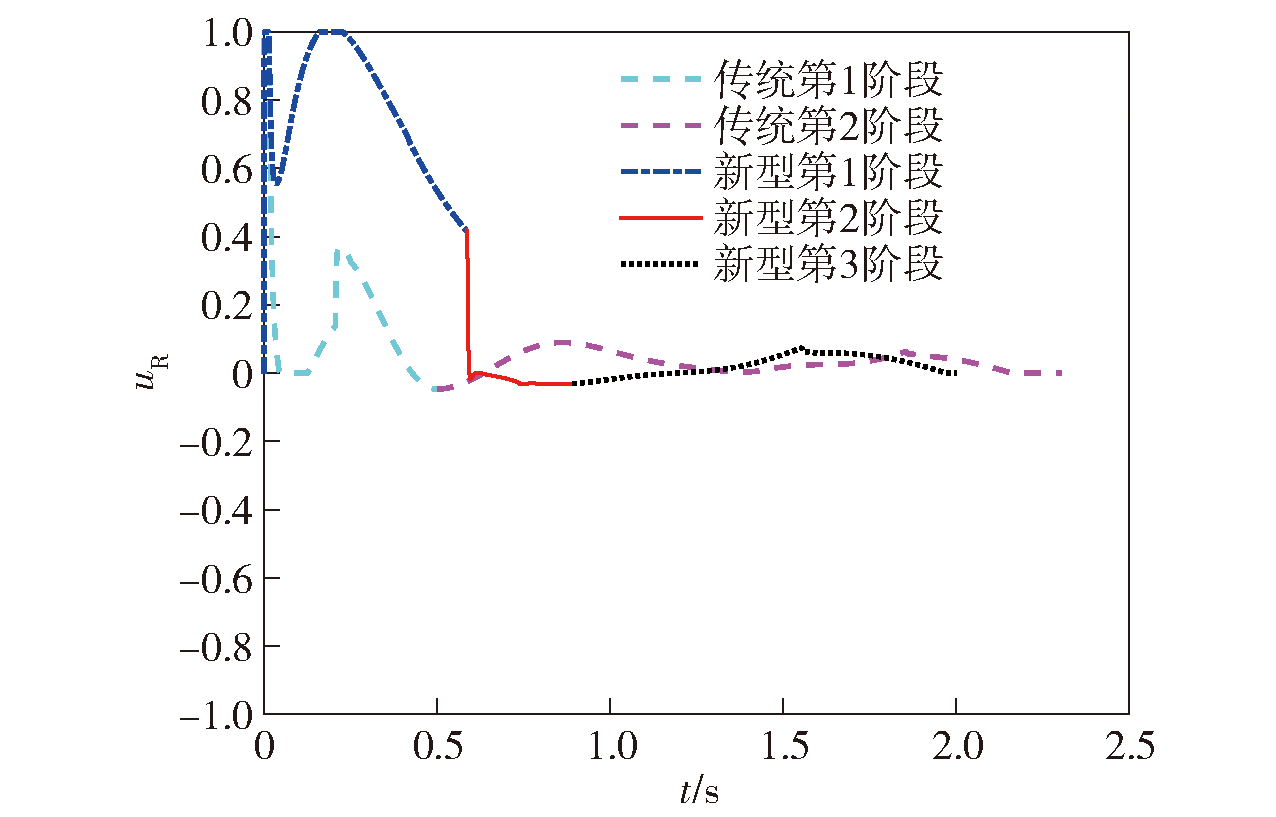
Fig.14 Curves of reaction-jet command
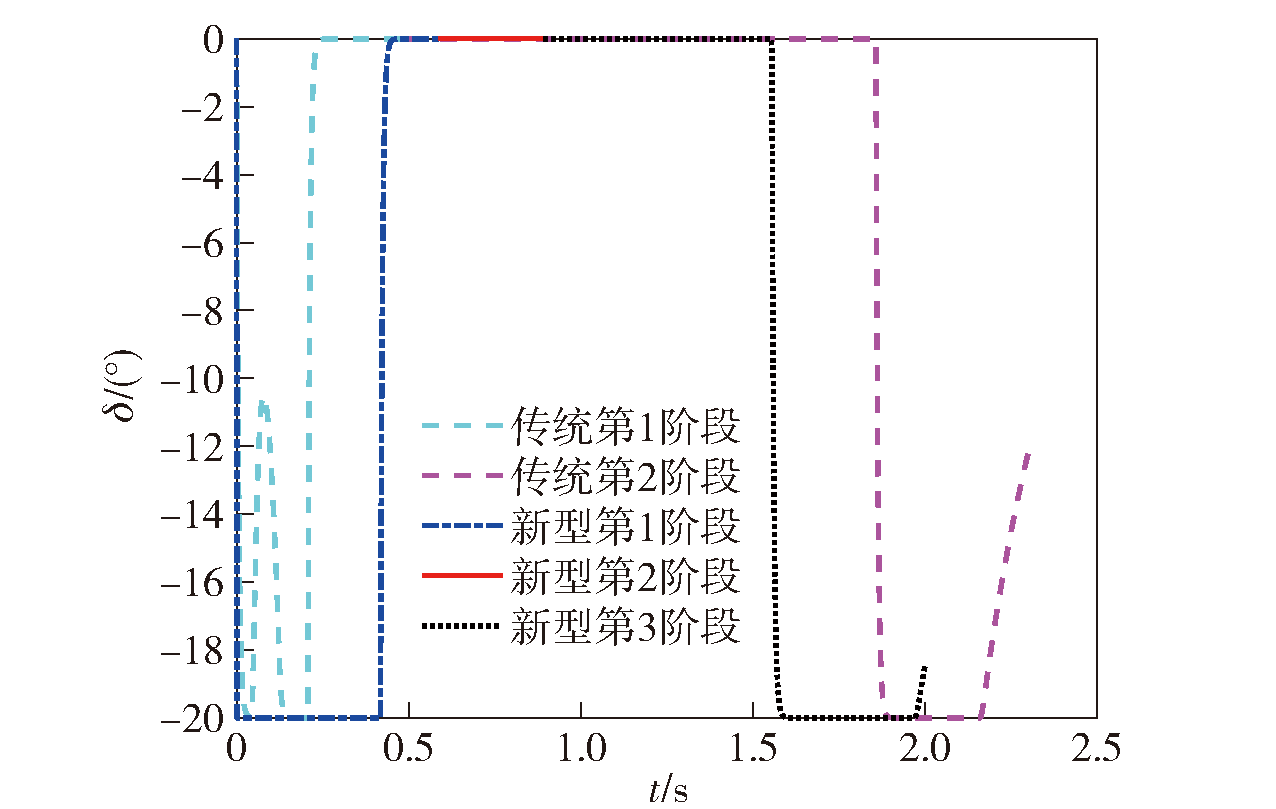
Fig.15 Curves of elevator deflection command
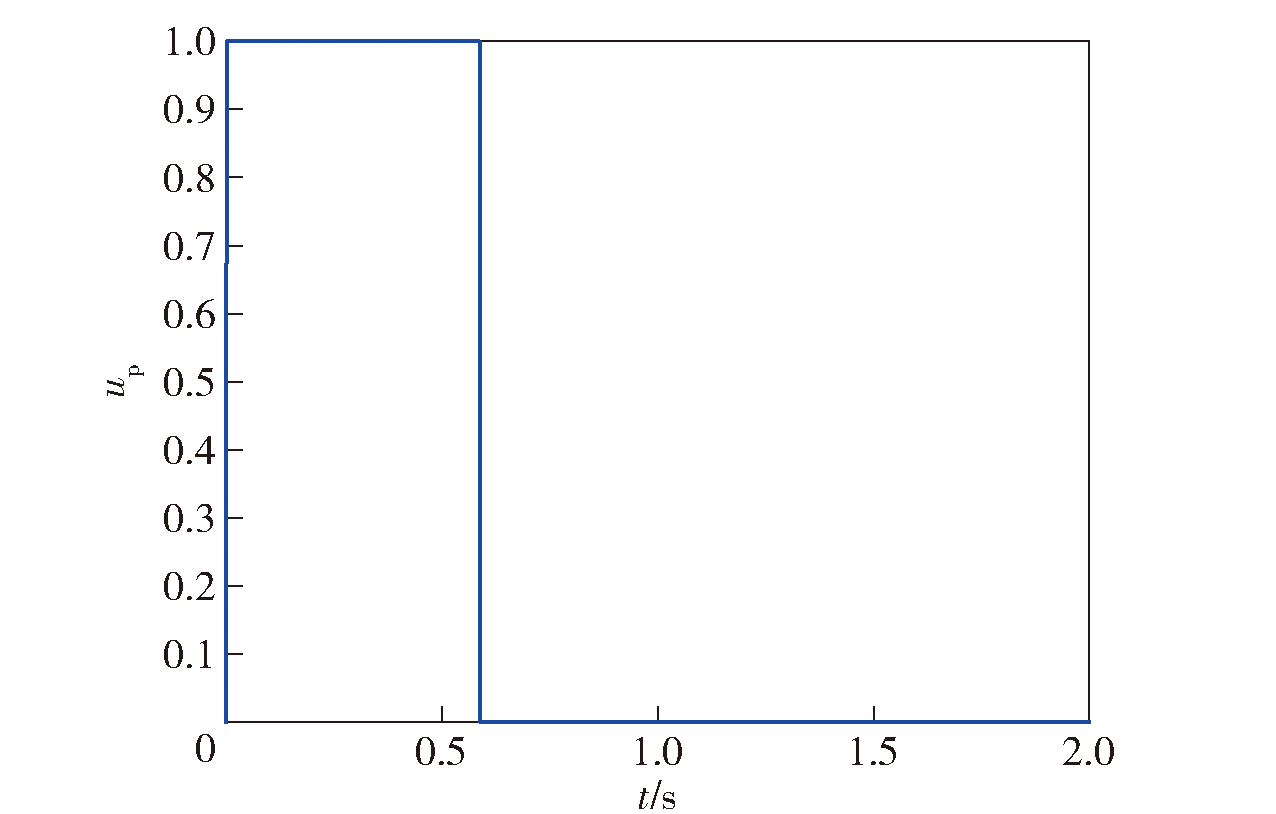
Fig.16 Curve of flexible force command
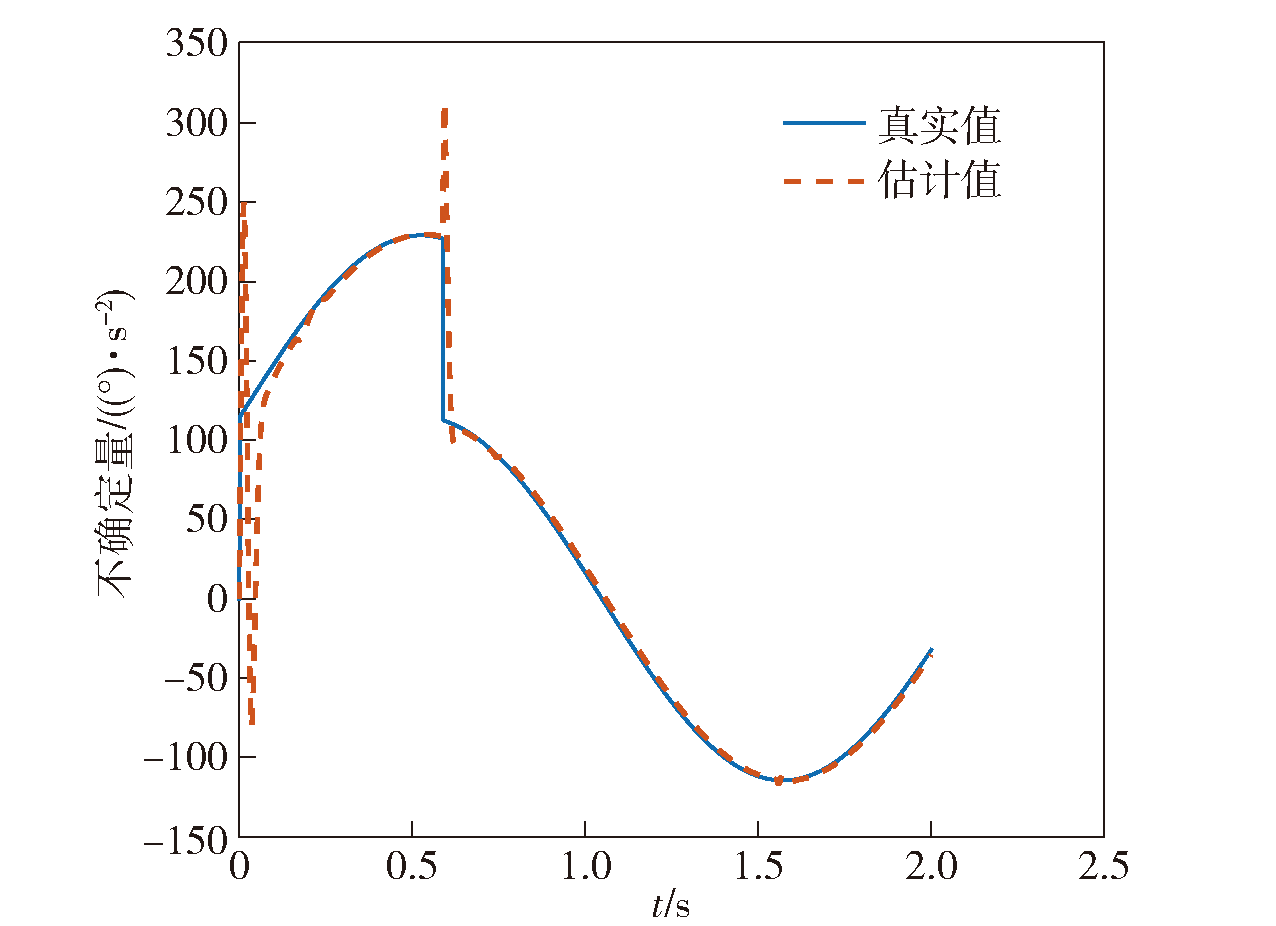
Fig.17 Curves of uncertainty
| 参数 | 数值 |
|---|---|
| 质量/kg | 102.1573 |
| 转动惯量/(kg·m2) | 69.1467 |
| 特征长度/m | 0.1270 |
| 特征面积/m2 | 0.0127 |
Table B1 Structural parameters of projectiles
| 参数 | 数值 |
|---|---|
| 质量/kg | 102.1573 |
| 转动惯量/(kg·m2) | 69.1467 |
| 特征长度/m | 0.1270 |
| 特征面积/m2 | 0.0127 |
| 攻角/(°) | Ma | Cnα | Cnδ | Cmα | Cmδ |
|---|---|---|---|---|---|
| 0.3 | 16.094 | 12.307 | -48.106 | -123.266 | |
| 10 | 0.6 | 13.212 | 12.485 | -46.822 | -124.985 |
| 0.8 | 10.875 | 12.124 | -44.777 | -121.278 | |
| 2.0 | 10.015 | 6.520 | -10.279 | -67.076 | |
| 0.3 | 6.578 | 5.690 | -68.927 | -56.992 | |
| 40 | 0.6 | 44.112 | 6.452 | -103.362 | -64.570 |
| 0.8 | 52.443 | 6.976 | -104.679 | -69.683 | |
| 2.0 | 31.581 | 4.864 | -58.786 | -50.008 | |
| 0.3 | 10.796 | 0 | 0 | 0 | |
| 80 | 0.6 | 11.156 | 0 | 0 | 0 |
| 0.8 | 11.529 | 0 | 0 | 0 | |
| 2.0 | 0 | 0 | 0 | 0 |
Table B2 Aerodynamic coefficients of projectiles
| 攻角/(°) | Ma | Cnα | Cnδ | Cmα | Cmδ |
|---|---|---|---|---|---|
| 0.3 | 16.094 | 12.307 | -48.106 | -123.266 | |
| 10 | 0.6 | 13.212 | 12.485 | -46.822 | -124.985 |
| 0.8 | 10.875 | 12.124 | -44.777 | -121.278 | |
| 2.0 | 10.015 | 6.520 | -10.279 | -67.076 | |
| 0.3 | 6.578 | 5.690 | -68.927 | -56.992 | |
| 40 | 0.6 | 44.112 | 6.452 | -103.362 | -64.570 |
| 0.8 | 52.443 | 6.976 | -104.679 | -69.683 | |
| 2.0 | 31.581 | 4.864 | -58.786 | -50.008 | |
| 0.3 | 10.796 | 0 | 0 | 0 | |
| 80 | 0.6 | 11.156 | 0 | 0 | 0 |
| 0.8 | 11.529 | 0 | 0 | 0 | |
| 2.0 | 0 | 0 | 0 | 0 |
| 伞的攻角/(°) | Ma | CN | CT | Cmp |
|---|---|---|---|---|
| 10 | 0.2 | 0.080 | 0.550 | -0.018 |
| 0.6 | 0.084 | 0.627 | -0.020 | |
| 20 | 0.2 | 0.150 | 0.480 | -0.027 |
| 0.6 | 0.179 | 0.592 | -0.031 | |
| 30 | 0.2 | 0.280 | 0.400 | -0.035 |
| 0.6 | 0.340 | 0.482 | -0.042 | |
| 40 | 0.2 | 0.400 | 0.280 | -0.043 |
| 0.6 | 0.510 | 0.335 | -0.050 |
Table B3 Aerodynamic coefficients of parachute
| 伞的攻角/(°) | Ma | CN | CT | Cmp |
|---|---|---|---|---|
| 10 | 0.2 | 0.080 | 0.550 | -0.018 |
| 0.6 | 0.084 | 0.627 | -0.020 | |
| 20 | 0.2 | 0.150 | 0.480 | -0.027 |
| 0.6 | 0.179 | 0.592 | -0.031 | |
| 30 | 0.2 | 0.280 | 0.400 | -0.035 |
| 0.6 | 0.340 | 0.482 | -0.042 | |
| 40 | 0.2 | 0.400 | 0.280 | -0.043 |
| 0.6 | 0.510 | 0.335 | -0.050 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
刘祥, 李爱军, 郭永, 等. 固定时间收敛的空空导弹直接力/气动力复合控制[J]. 哈尔滨工业大学学报, 2019, 51(9):29-34,42.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
霍鑫, 彭继平, 马克茂, 等. 空空导弹敏捷转弯的分段线性滑模控制设计[J]. 系统工程与电子技术, 2017, 39(10):2278-2284.
|
|
doi: 10.3969/j.issn.1001-506X.2017.10.18 |
|
| [10] |
马悦悦, 唐胜景, 郭杰. 基于改进Terminal滑模的导弹大角度机动控制[J]. 北京航空航天大学学报, 2016, 42(3):472-480.
|
|
|
|
| [11] |
李政, 于剑桥, 赵新运. 空空导弹敏捷转弯固定时间收敛滑模控制[J]. 航空学报, 2023, 44(8):208-221.
|
|
|
|
| [12] |
赵新运, 于剑桥. 导弹敏捷转弯段的新型非奇异终端滑模控制[J]. 宇航学报, 2022, 43(4):454-464.
|
|
|
|
| [13] |
李健, 房冠辉, 吕智慧, 等. 天问一号火星探测器伞系减速分系统设计与验证[J]. 中国科学:技术科学, 2022, 52(2):264-277.
|
|
|
|
| [14] |
董捷, 饶炜, 孙泽洲, 等. 火星伞降段多体动力学特性分析与安全设计研究[J]. 中国科学:技术科学, 2022, 52(8):1175-1185.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
韩晋阳, 白春华, 檀盼龙. 伞降战斗部毁伤试验落点预测方法研究[J]. 兵工学报, 2020, 41(6):1077-1084.
doi: 10.3969/j.issn.1000-1093.2020.06.004 |
|
doi: 10.3969/j.issn.1000-1093.2020.06.004 |
|
| [20] |
|
| [21] |
|
| [22] |
王睿, 周洲, 郭荣化, 等. 太阳能无人机伞降着陆多体动力学仿真与试验[J]. 航空学报, 2022, 43(8): 456-468.
|
|
|
|
| [23] |
|
| [24] |
吴翰, 王正平, 周洲, 等. 无人机伞降回收十二自由度模型建立与仿真[J]. 西北工业大学学报, 2020, 38(1): 68-74.
|
|
|
|
| [25] |
|
| [26] |
唐乾刚, 张青斌, 张晓今, 等. 伞-弹系统九自由度动力学模型[J]. 兵工学报, 2007, 28(4):449-452.
|
|
|
|
| [27] |
唐乾刚, 王昱, 张青斌, 等. 伞-弹动力学及运动学在末敏弹目标识别中的应用[J]. 兵工学报, 2007, 28(7): 796-799.
|
|
|
|
| [28] |
|
| [29] |
王立武, 高庆玉, 许望晶, 等. 嫦娥五号返回器降落伞回收动力学建模与分析[J]. 宇航学报, 2021, 42(8):1051-1056.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
周文雅, 马瑞鑫, 胡欣涵, 等. 圆形降落伞下降轨迹控制研究[J]. 兵器装备工程学报, 2021, 42(1):26-30.
|
|
|
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000.
|
|
|
|
| [42] |
张良总, 杨涛, 吴云, 等. 基于图像测量的Stewart平台双阶控制技术[J]. 光电工程, 2022, 49(8):75-84.
|
|
|
|
| [43] |
吴燕生. 中国运载火箭姿态控制技术发展与展望[J]. 宇航学报, 2023, 44(4):509-518.
|
|
|
|
| [44] |
张科, 陈之光, 赵玉印. 国外高速导弹的头罩防护技术[J]. 红外与激光工程, 2013, 42(1):154-158.
|
|
|
|
| [45] |
|
| [46] |
|
| [47] |
梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38(5):552-557.
|
|
|
|
| [48] |
韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1):85-88.
|
|
|
|
| [49] |
|
| [50] |
doi: 10.1016/j.isatra.2015.07.012 pmid: 26275404 |
| [1] | LIN Zhonglin, WANG Haitao, LIU Wenchao, GAN Jinyu, ZHANG Tianhong, HUANG Feng. Aero-engine Compressor Pressure Simulation Method Based on Multi-mode Acceleration and Backstepping Sliding Mode [J]. Acta Armamentarii, 2024, 45(6): 1776-1786. |
| [2] | YIN Qiulin, CHEN Qi, WANG Zhongyuan, WANG Qinghai. Rapid Trajectory Planning for Glide-guided Projectiles in Single-gun Multi-shot Scenarios Considering Time-spatial Coordination [J]. Acta Armamentarii, 2024, 45(3): 798-809. |
| [3] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [4] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [5] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [6] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [7] | GAO Yuxuan, HOU Yuanlong, GAO Qiang, HOU Runmin. Compound Control Method of ADRC and FNTSM for Airborne Object Tracking System [J]. Acta Armamentarii, 2023, 44(4): 1071-1085. |
| [8] | GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load [J]. Acta Armamentarii, 2023, 44(3): 736-747. |
| [9] | DONG Jinlu, MA Yuemeng, ZHOU Di, GONG Xiaogang, ZHANG Xi, SONG Jiahong. A Composite Sliding Mode Control Scheme Based on Reaction Jets and Flaps for Near-Space Hypersonic Vehicles [J]. Acta Armamentarii, 2023, 44(2): 496-506. |
| [10] | YOU Hao, CHANG Xinlong, ZHAO Jiufen, ZHANG Youhong, WANG Shunhong. Three-dimensional Leader-follower Cooperative Guidance Law with Impact Angle Constraints [J]. Acta Armamentarii, 2023, 44(11): 3369-3381. |
| [11] | ZHAO Xinxin, SHI Jinguang, WANG Zhongyuan, ZHANG Ning. Nonlinear Angular Motionand Bifurcation Characteristics of Canard Dual-Spin Projectiles [J]. Acta Armamentarii, 2023, 44(10): 3067-3078. |
| [12] | WANG Shushan, ZHAO Chuan, SUN Yuhui, LIU Dongqi, ZHANG Xuejun, WANG Guangzhi. Principle and Method of Enhancing Grenade Power by Changing the Steel Material [J]. Acta Armamentarii, 2022, 43(9): 2291-2299. |
| [13] | TIAN Ze, WANG Hao, WU Haijun, DENG Ximin, PI Aiguo, LI Jinzhu, HUANG Fenglei. Attitude Deflection Mechanism of Projectiles with Variable Elliptical Cross-sections Obliquely Perforating Thin Targets [J]. Acta Armamentarii, 2022, 43(7): 1537-1552. |
| [14] | ZENG Qing-han, MA Xiao-jun, LIAO Zi-li, WEI Shu-guang. Stable Steer Control of Electric Drive Tracked Vehicle Based on Equivalent Sliding Mode Technique with Conditional Integrator [J]. Acta Armamentarii, 2016, 37(8): 1351-1358. |
| [15] | CHEN Chen, MA Guang-fu, SUN Yan-chao, LI Chuan-jiang. Recursive Sliding Mode Control for Hypersonic Vehicle Based on Nonlinear Disturbance Observer [J]. Acta Armamentarii, 2016, 37(5): 840-850. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||