
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2709-2721.doi: 10.12382/bgxb.2022.1216
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
LI Siqi1, GONG Peng1, SHAN Dan1,2, LI Jianfeng1, LIU Yu1, GAO Xiang1,*( )
)
Received:2022-12-05
Online:2023-01-09
Contact:
GAO Xiang
CLC Number:
LI Siqi, GONG Peng, SHAN Dan, LI Jianfeng, LIU Yu, GAO Xiang. Design and Implementation of Hardware-in-the-loop Test Architecture for UAV Information Attack Based on QualNet[J]. Acta Armamentarii, 2023, 44(9): 2709-2721.
Add to citation manager EndNote|Ris|BibTeX
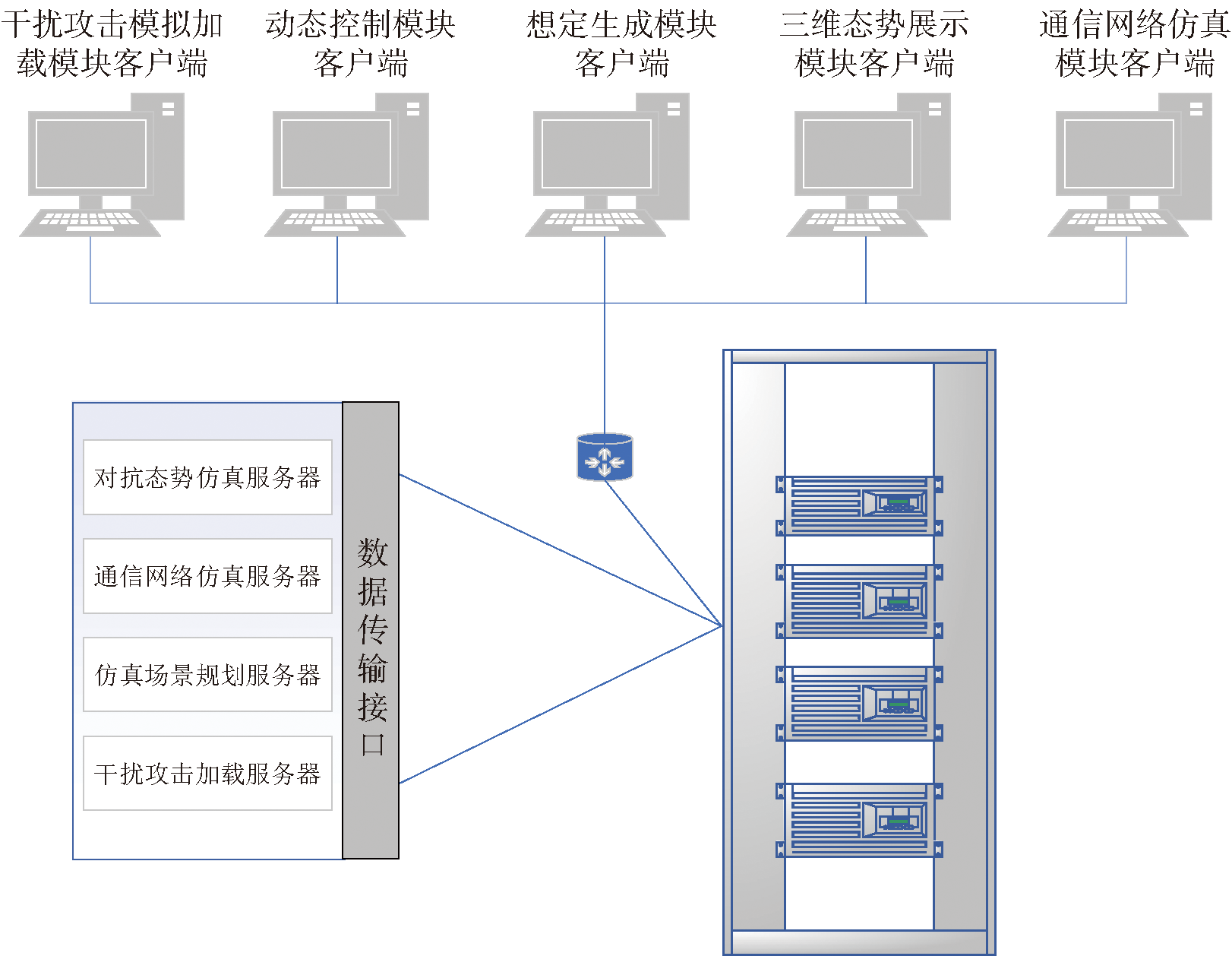
Fig.1 Hardware-in-the-loop test architecture for UAV information attack
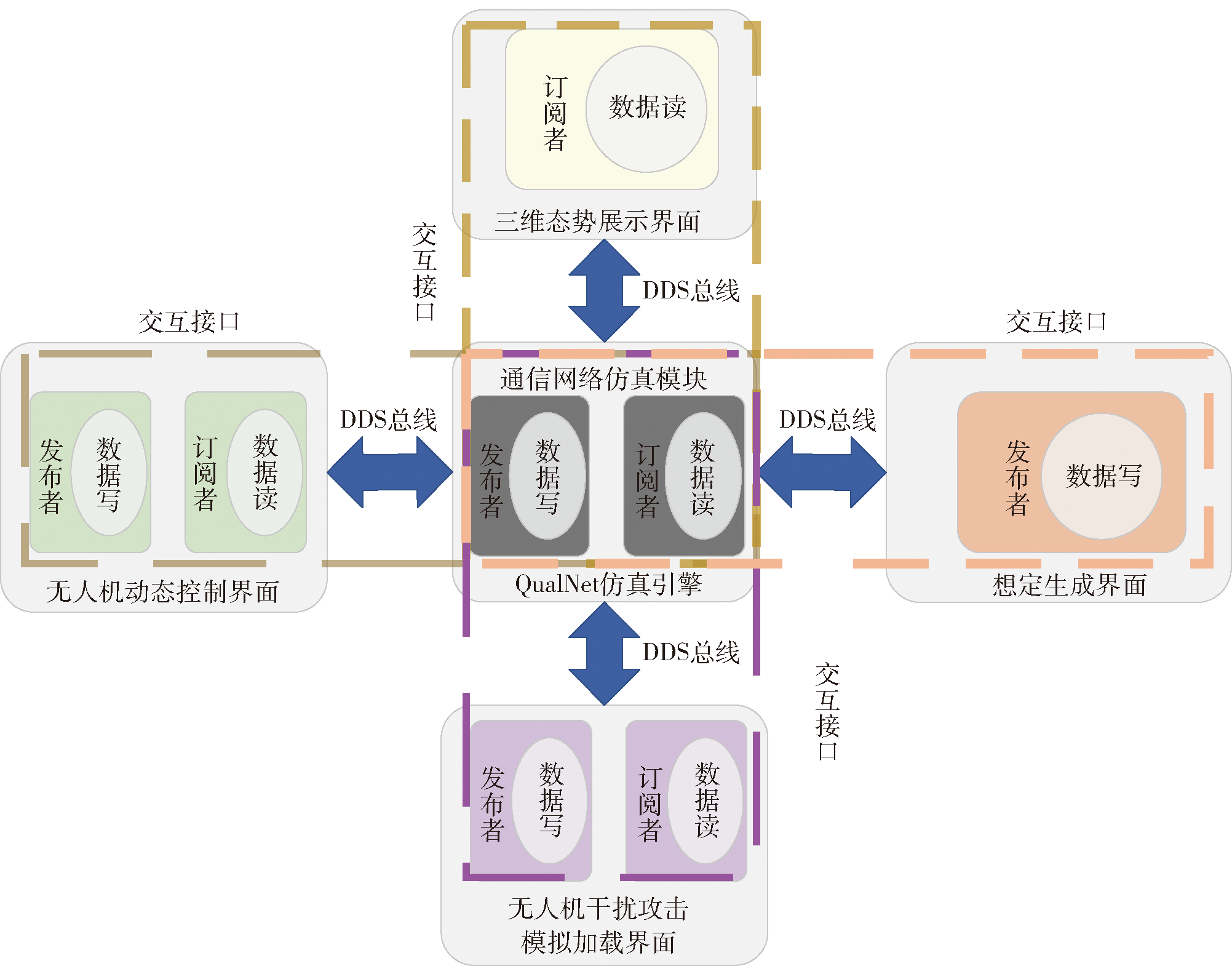
Fig.2 Framework of the UAV data transmission interface
| 功能 | 交互数据 | 发送端 | 接收端 |
|---|---|---|---|
| 遥控参数设置 | 遥控数据 | 动态控制模块发布者 | QualNet网络仿真软件订阅者 |
| 遥测数据获取 | 遥测数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者 |
| 三维态势展示 | 态势数据 | QualNet网络仿真软件发布者 | 三维态势展示模块订阅者 |
| 通信参数应答 | 通信参数数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者、干扰攻击模拟加载模块订阅者 |
| 干扰参数设置 | 干扰参数数据 | 干扰攻击模拟加载模块发布者 | QualNet网络仿真软件订阅者 |
| 干扰参数应答 | 干扰参数数据 | QualNet网络仿真软件发布者 | 干扰攻击模拟加载模块订阅者 |
| 仿真初始化 | 仿真场景参数数据 | 想定规划模块发布者 | QualNet网络仿真软件订阅者 |
Table 1 UAV data transmission interface data interaction relationship
| 功能 | 交互数据 | 发送端 | 接收端 |
|---|---|---|---|
| 遥控参数设置 | 遥控数据 | 动态控制模块发布者 | QualNet网络仿真软件订阅者 |
| 遥测数据获取 | 遥测数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者 |
| 三维态势展示 | 态势数据 | QualNet网络仿真软件发布者 | 三维态势展示模块订阅者 |
| 通信参数应答 | 通信参数数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者、干扰攻击模拟加载模块订阅者 |
| 干扰参数设置 | 干扰参数数据 | 干扰攻击模拟加载模块发布者 | QualNet网络仿真软件订阅者 |
| 干扰参数应答 | 干扰参数数据 | QualNet网络仿真软件发布者 | 干扰攻击模拟加载模块订阅者 |
| 仿真初始化 | 仿真场景参数数据 | 想定规划模块发布者 | QualNet网络仿真软件订阅者 |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeID | unsignedShort | 发送遥控数据节点号 |
| destnodeID | unsignedShort | 接收遥控数据节点号 |
| HFlyMode | unsignedShort | 水平飞行方式(0、1、2取值分别代表无、左盘旋、右盘旋) |
| VFlyMode | unsignedShort | 垂直飞行方式(0、1、2、3取值分别代表无、爬升、下降、降落) |
Table 2 Specific description of the KjRemoteControl structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeID | unsignedShort | 发送遥控数据节点号 |
| destnodeID | unsignedShort | 接收遥控数据节点号 |
| HFlyMode | unsignedShort | 水平飞行方式(0、1、2取值分别代表无、左盘旋、右盘旋) |
| VFlyMode | unsignedShort | 垂直飞行方式(0、1、2、3取值分别代表无、爬升、下降、降落) |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| nodeID | unsignedShort | 干扰机节点的节点号 |
| active | unsignedShort | 干扰机工作状态(0、1取值分别代表关机、开机) |
| txPower | float | 干扰功率 |
| gain | float | 天线增益 |
| jammerMode | unsignedShort | 干扰模式 |
| startFrequency | double | 干扰开始频率 |
| endFrequency | double | 干扰结束频率 |
| HStartAngle | double | 干扰波束水平起始角度 |
| HEndAngle | double | 干扰波束水平终止角度 |
| VStartAngle | double | 干扰波束垂直起始角度 |
| VEndAngle | double | 干扰波束垂直终止角度 |
| signalMode | unsignedShort | 接管控制指令(0、1、2、3取值分别代表左盘旋、右盘旋、俯冲、停车) |
Table 3 Specific description of the UavJammerData structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| nodeID | unsignedShort | 干扰机节点的节点号 |
| active | unsignedShort | 干扰机工作状态(0、1取值分别代表关机、开机) |
| txPower | float | 干扰功率 |
| gain | float | 天线增益 |
| jammerMode | unsignedShort | 干扰模式 |
| startFrequency | double | 干扰开始频率 |
| endFrequency | double | 干扰结束频率 |
| HStartAngle | double | 干扰波束水平起始角度 |
| HEndAngle | double | 干扰波束水平终止角度 |
| VStartAngle | double | 干扰波束垂直起始角度 |
| VEndAngle | double | 干扰波束垂直终止角度 |
| signalMode | unsignedShort | 接管控制指令(0、1、2、3取值分别代表左盘旋、右盘旋、俯冲、停车) |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeId | unsignedShort | 发送遥测数据节点号 |
| destnodeId | unsignedShort | 接收遥测数据节点号 |
| synCode | unsignedShort | 同步码 |
| flightStatus | unsignedShort | 飞行状态 |
| pitchAngle | float | 俯仰角 |
| tiltAngle | float | 倾斜角 |
| airspeed | float | 空速 |
| longitude | double | 经度 |
| latitude | double | 纬度 |
| altitude | float | 海拔 |
| frequency | double | 频率 |
| bandwidth | long | 带宽 |
| txPower | float | 发送功率 |
| interFrameTime | long | 帧间时长 |
| slotDuration | long | 时隙长度 |
| numSlotsPerFrame | unsignedShort | 每帧时隙数 |
| guardTime | long | 保护间隔 |
| rxSensitivity | double | 接收灵敏度 |
Table 4 Specific description of the KjRemoteMeassure structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeId | unsignedShort | 发送遥测数据节点号 |
| destnodeId | unsignedShort | 接收遥测数据节点号 |
| synCode | unsignedShort | 同步码 |
| flightStatus | unsignedShort | 飞行状态 |
| pitchAngle | float | 俯仰角 |
| tiltAngle | float | 倾斜角 |
| airspeed | float | 空速 |
| longitude | double | 经度 |
| latitude | double | 纬度 |
| altitude | float | 海拔 |
| frequency | double | 频率 |
| bandwidth | long | 带宽 |
| txPower | float | 发送功率 |
| interFrameTime | long | 帧间时长 |
| slotDuration | long | 时隙长度 |
| numSlotsPerFrame | unsignedShort | 每帧时隙数 |
| guardTime | long | 保护间隔 |
| rxSensitivity | double | 接收灵敏度 |
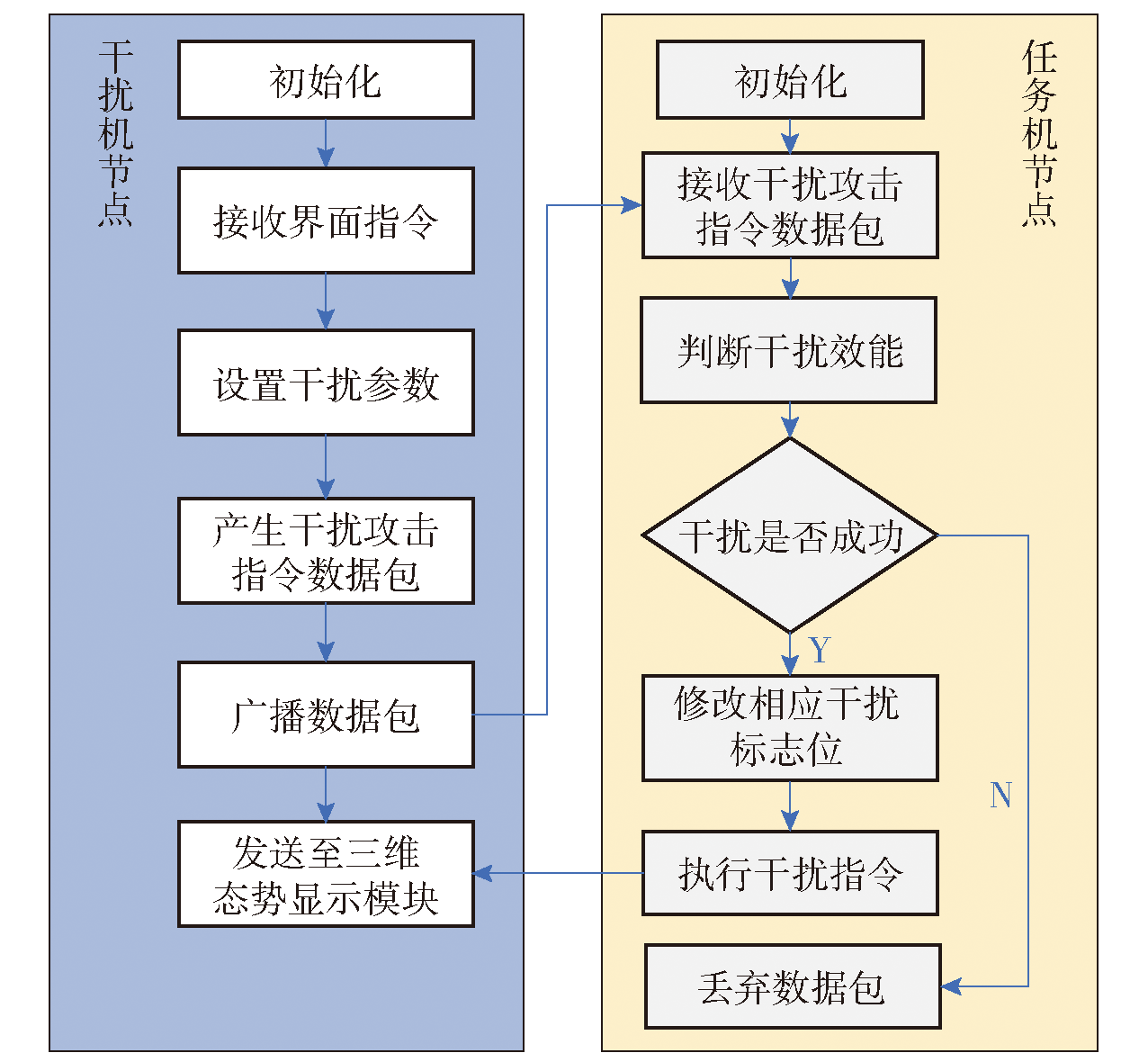
Fig.3 Workflow of interference application model
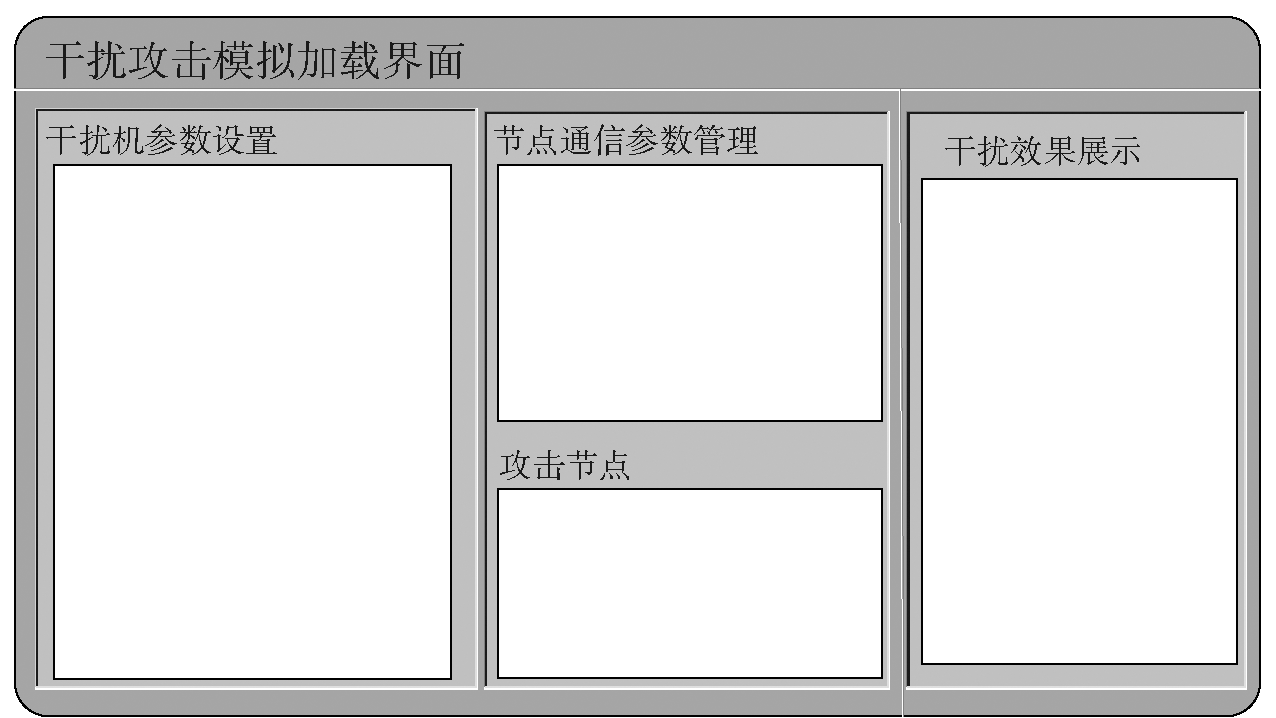
Fig.4 Interface framework of jamming attack simulation loading module

Fig.5 Interface rendering of jamming attack simulation loading module
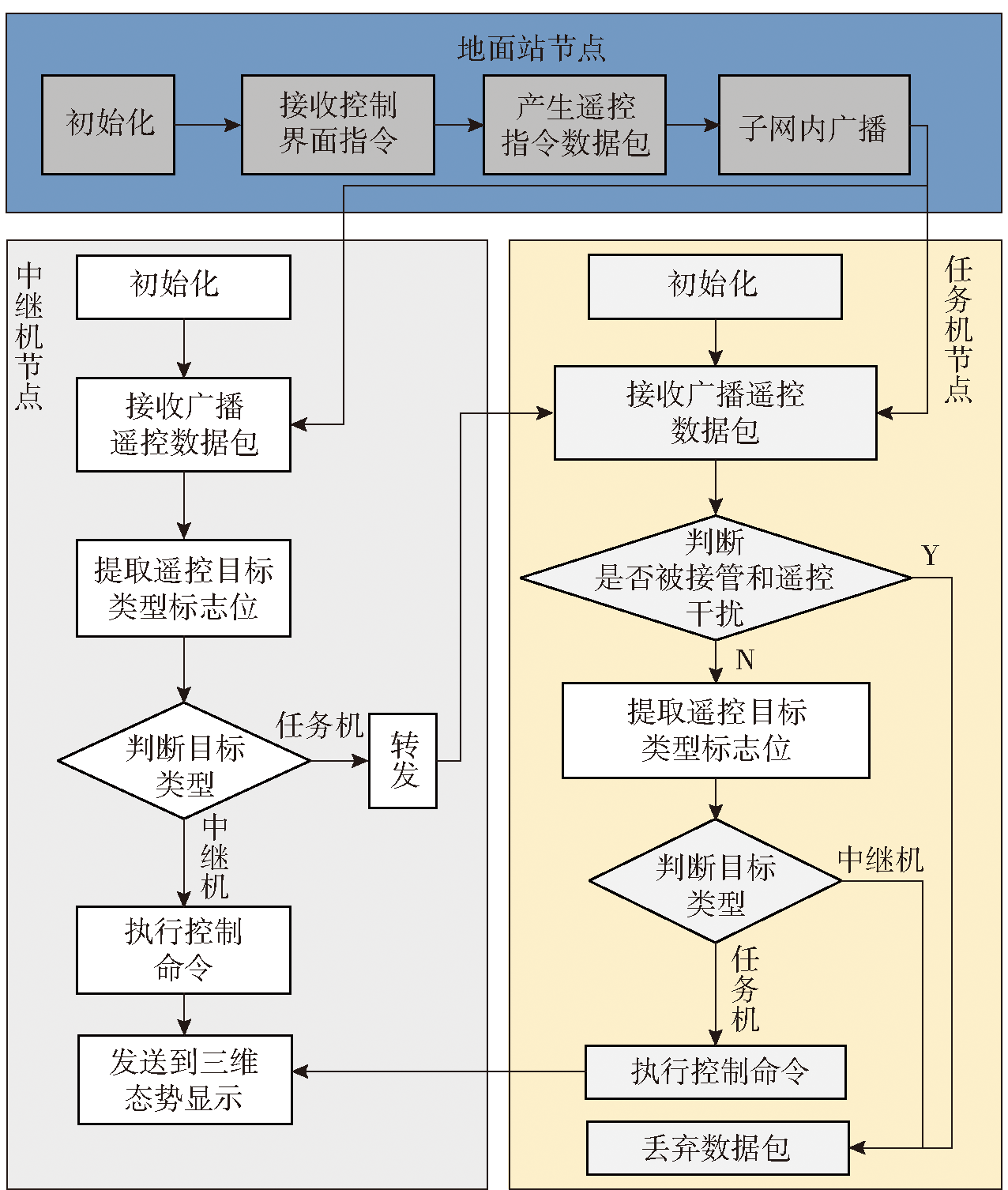
Fig.6 Workflow of remote control application model

Fig.7 Workflow of remote measurement application model

Fig.8 Interface framework of dynamic control module

Fig.9 Interface rendering of UAV dynamic control module

Fig.10 UAV information attack simulation scenario configuration based on QualNet
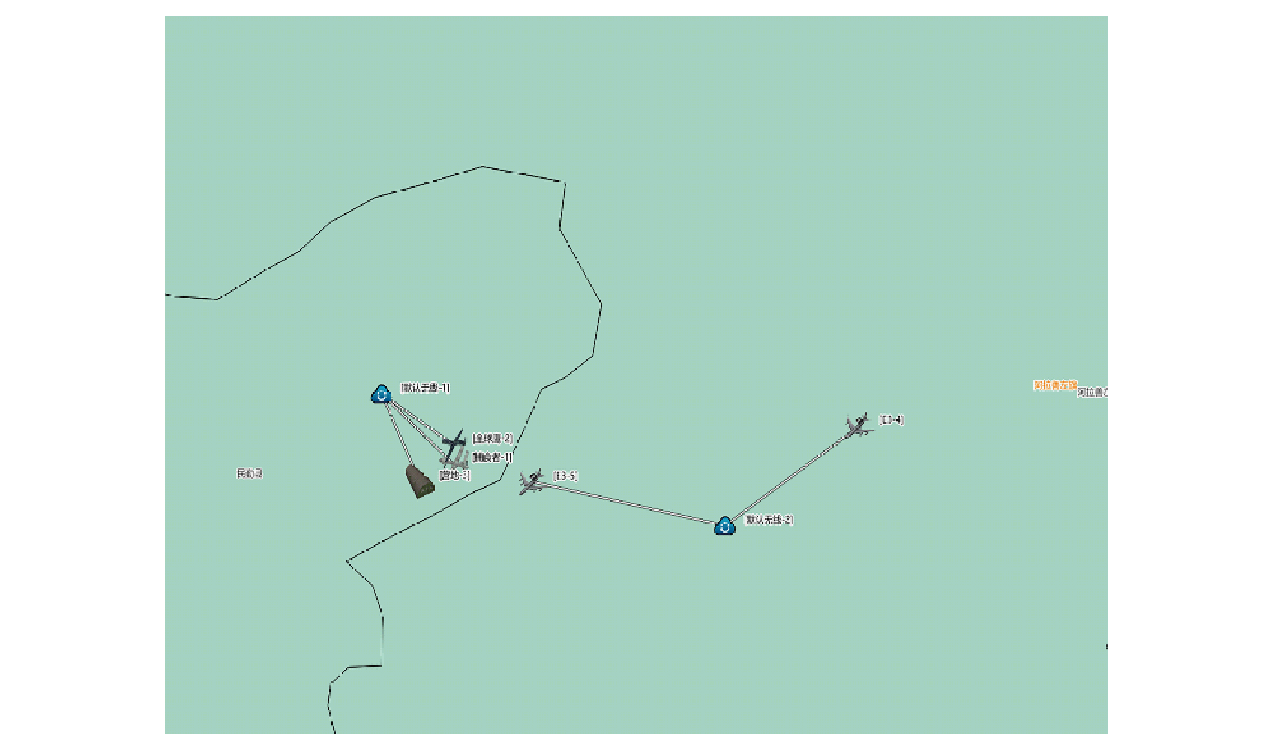
Fig.11 Simulation test scenario

Fig.12 Display of dynamic control interface before remote measurement jamming
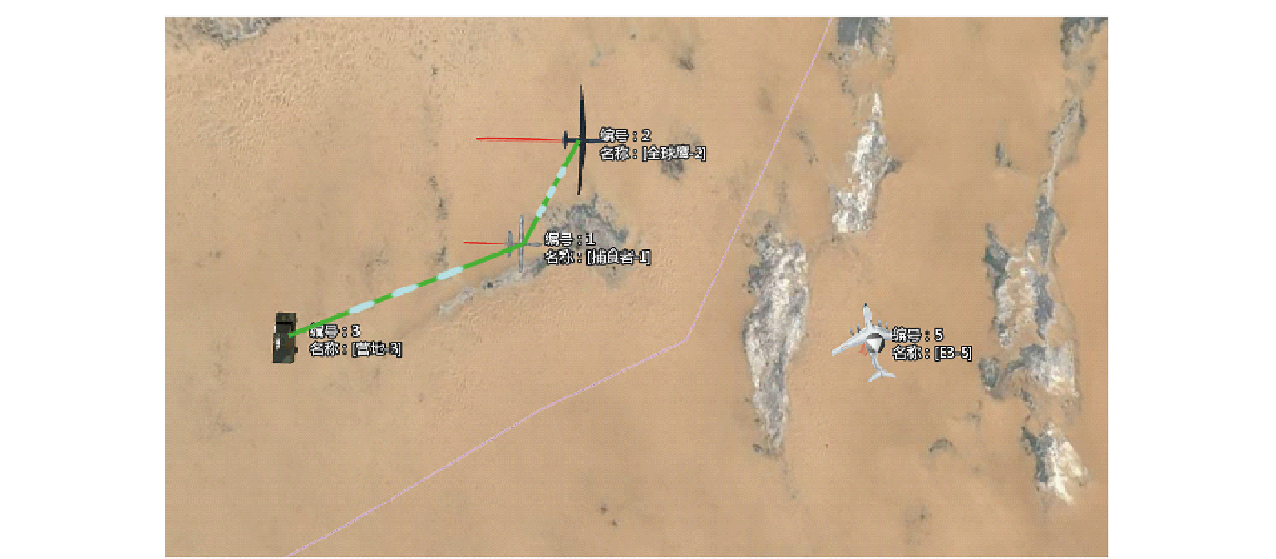
Fig.13 Display of the three dimensional situation interface before remote measurement jamming

Fig.14 Remote measurement jamming On

Fig.15 Display of dynamic control interface after remote measurement jamming is On

Fig.16 Display of three dimensional situation interface after remote measurement jamming is On
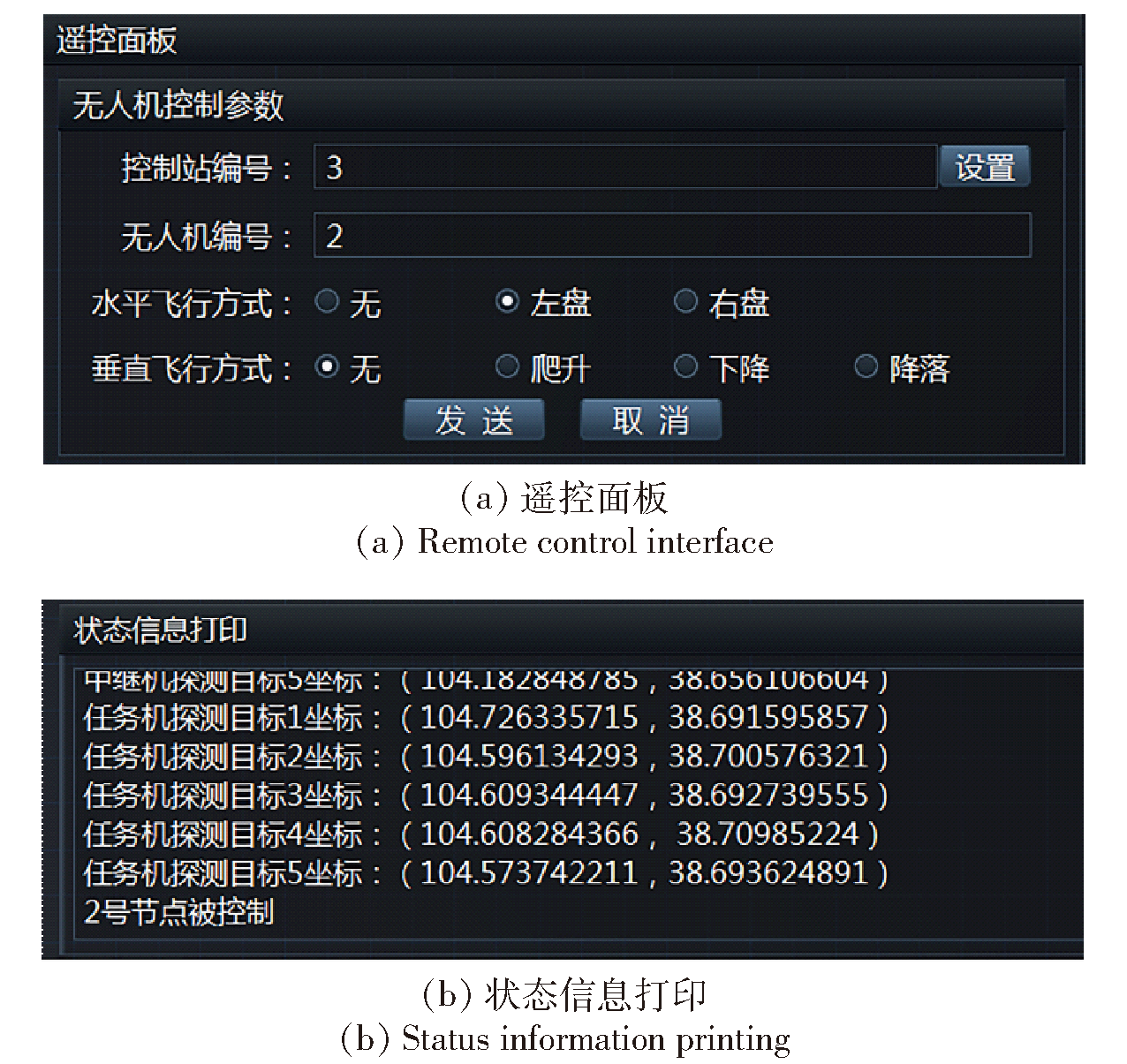
Fig.17 Display of dynamic control interface before remote control jamming

Fig.18 Display of three dimensional situation interface before remote control jamming

Fig.19 Remote control jamming On

Fig.20 Display of dynamic control interface after remote control jamming is On

Fig.21 Display of three dimensional situation panel after remote control jamming is On

Fig.22 Takeover control attack On
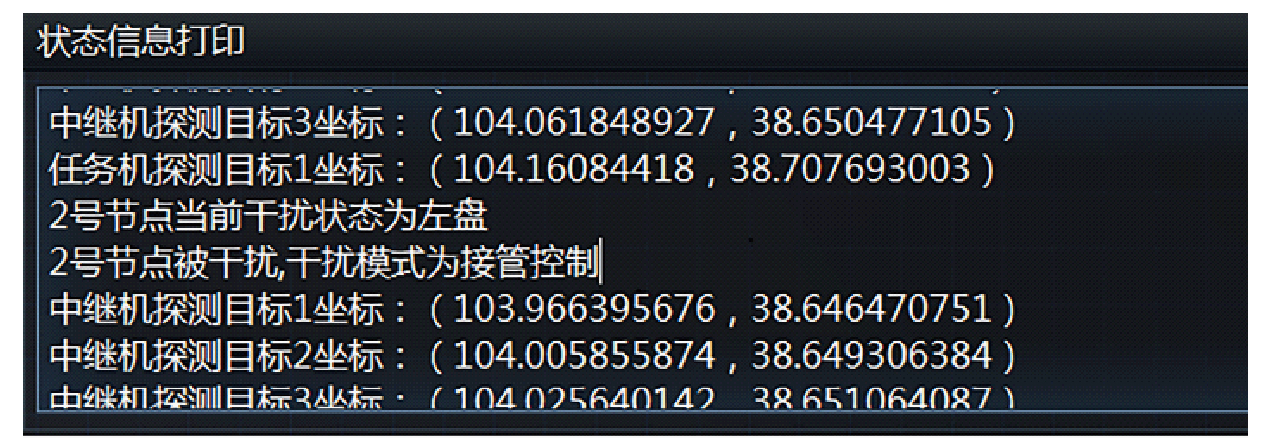
Fig.23 Display of the status information printing window of dynamic control interface
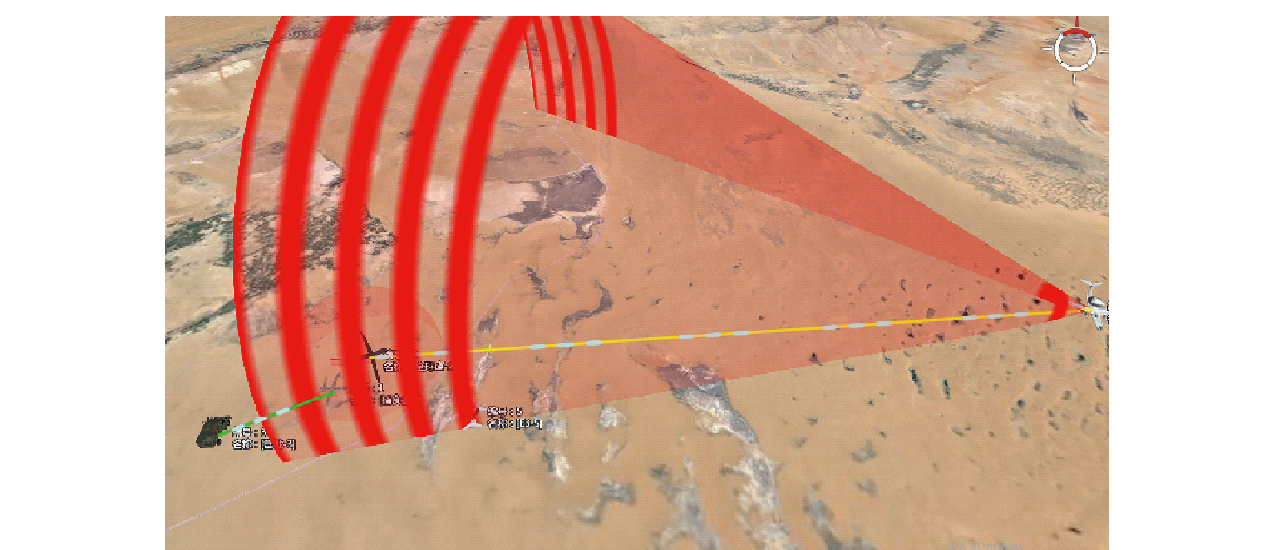
Fig.24 Display of three dimensional situation panel after takeover control attack is On
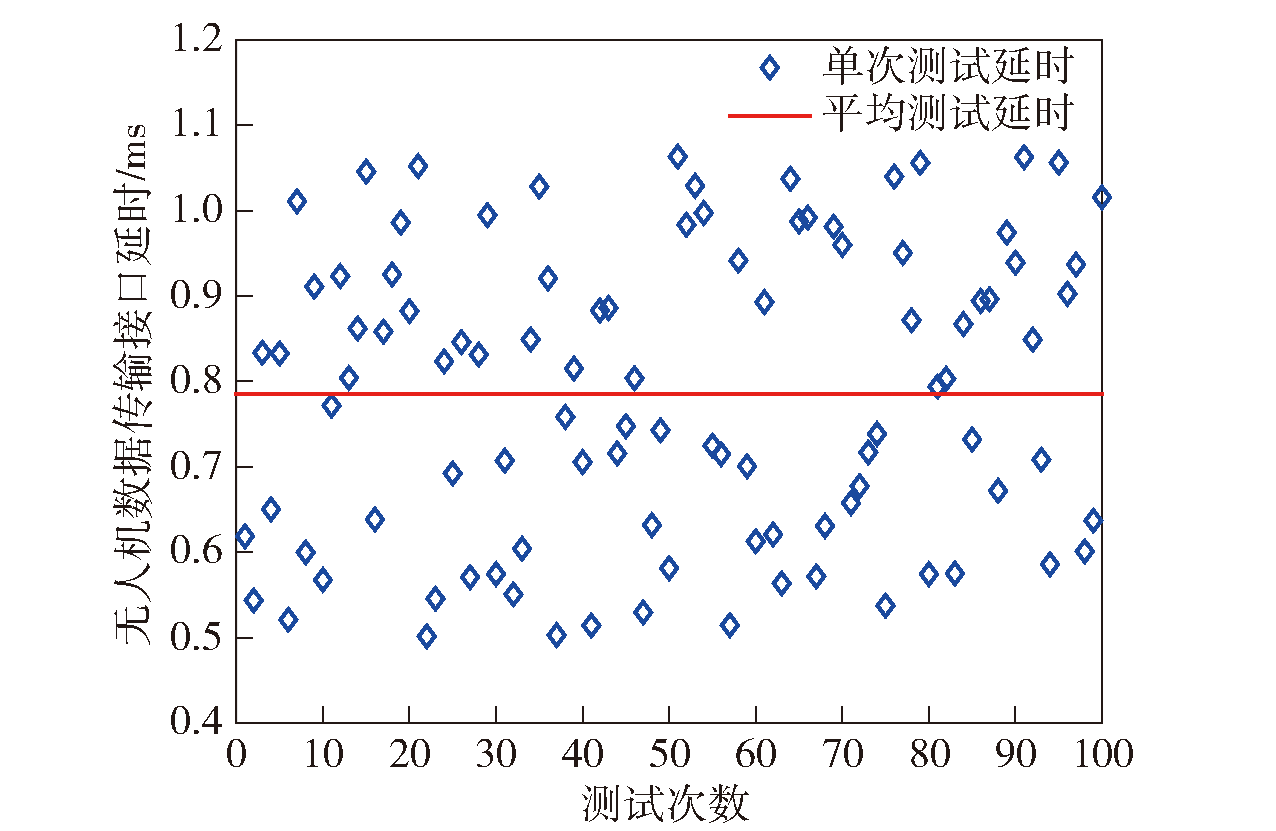
Fig.25 Delay test results of UAV data transmission interface
| [1] |
任媛媛, 高一栋, 焦慕卿. 无人机发展应用及反无手段研究[J]. 火控雷达技术, 2022, 51(1):27-32.
|
|
|
|
| [2] |
张晓杰, 郑纪彬, 苏涛, 等. 无人机集群协同搜索跟踪任务规划方法[J]. 雷达科学与技术, 2022, 20(5):480-491.
|
|
|
|
| [3] |
|
| [4] |
张羿山, 陈傲然, 王泽宇, 等. 基于城市运行的无人机路径规划研究[J]. 信息技术与信息化, 2022(5):182-186.
|
|
|
|
| [5] |
吴浩, 徐婧, 李刚. 无人机探测与反制技术发展现状及建议[J]. 飞航导弹, 2020(9):89-95.
|
|
|
|
| [6] |
牛余凯. 基于强化学习的小型无人机防御智能决策技术研究[D]. 北京: 军事科学院, 2021.
|
|
|
|
| [7] |
张哲聪, 唐碧蔚, 杨玉龙, 等. 基于无人机链路控制的抗干扰策略及干扰检测作战技术研究[J]. 电子技术与软件工程, 2020(23):28-30.
|
|
|
|
| [8] |
韩立园, 于林韬, 丛妍, 等. 基于OPNET的网络建模仿真分析[J]. 长春理工大学学报(自然科学版), 2019, 42(1):119-122.
|
|
|
|
| [9] |
蔡虔. 基于NS-2的无线自组织网络仿真实验设计[J]. 科技广场, 2015(5):107-111.
|
|
|
|
| [10] |
刘敏, 乔会东, 郎杰, 等. 基于QualNet的通信网络仿真研究[J]. 电子设计工程, 2014, 22(10):127-130.
|
|
|
|
| [11] |
杨宝庆, 马杰, 姚郁. 飞行器半实物仿真装备研究进展与展望[J]. 宇航学报, 2020, 41(6):657-665.
|
|
|
|
| [12] |
|
| [13] |
王召阳, 常家辉, 白子龙. 美军仿真技术及其应用现状分析[J]. 兵工自动化, 2021, 40(10):66-69.
|
|
|
|
| [14] |
|
| [15] |
doi: 10.1007/s13272-021-00509-7 |
| [16] |
黄瑞松, 李海凤, 刘金, 等. 飞行器半实物仿真技术现状与发展趋势分析[J]. 系统仿真学报, 2019, 31(9): 1763-1774.
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
|
|
| [17] |
王雪松. 飞行器姿态控制半实物仿真系统设计[D]. 哈尔滨: 哈尔滨工程大学, 2017.
|
|
|
|
| [18] |
朱煜良, 赵智全, 姚长虹, 等. 无人机通信干扰电磁环境半实物仿真系统[J]. 电讯技术, 2019, 59(4):476-481.
|
|
|
|
| [19] |
吕永玺, 屈晓波, 史静平. 无人机飞行控制半实物仿真系统设计与实现[J]. 实验技术与管理, 2021, 38(3):153-157.
|
|
|
|
| [20] |
龚鹏, 李思琪, 杨昊伟, 等.无人机信息攻击半实物测试系统及方法:中国. CN202210327523.1[P]. 2022-07-01.
|
|
|
|
| [21] |
李慧博, 吴海乔, 栗苹, 等. 基于VMware的Link11数据链半实物仿真技术[J]. 兵工学报, 2020, 41(增刊2):224-233.
|
|
|
| [1] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [2] | GUO Zhiming, LOU Wenzhong, LI Tao, ZHANG Mengyu, BAI Zilong, QIAO Hu. Collaborative Route Planning of Multiple Unmanned Aerial Vehicles Considering Task Threats Based on Improved Grasshopper Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(S2): 52-60. |
| [3] | HUANG Feng, WANG Weixiong, LIN Zhonglin, WU Xianyu, ZHUANG Jiaquan. Design and Experimental Study of a Novel Semi-physical Simulation Platform for Visual Navigation of Quadrotor UAVs [J]. Acta Armamentarii, 2023, 44(9): 2836-2848. |
| [4] | LIU Xingyu, GUO Ronghua, REN Chengcai, YAN Chao, CHANG Yuan, ZHOU Han, XIANG Xiaojia. Distributed Target Assignment Method for UAV Swarms Using Identity Hungarian Algorithm [J]. Acta Armamentarii, 2023, 44(9): 2824-2835. |
| [5] | YAN Yuwen, BI Wenhao, ZHANG An, ZHANG Baichuan. Task Allocation Method of UAV Clusters Based on Sequence Generative Adversarial Network [J]. Acta Armamentarii, 2023, 44(9): 2672-2684. |
| [6] | GONG Yuanqiang, ZHANG Yepeng, MA Wanpeng, XUE Xiao. Mechanisms of Group Intelligence Emergence in UAV Swarms [J]. Acta Armamentarii, 2023, 44(9): 2661-2671. |
| [7] | WANG Mengyang, ZHANG Dong, TANG Shuo, XU Bin, ZHAO Junmin. UAV Swarm On-line Mission Planning Method Based on Dynamic Allocation Strategy [J]. Acta Armamentarii, 2023, 44(8): 2207-2223. |
| [8] | LI Chao, WANG Ruixing, HUANG Jianzhong, JIANG Feilong, WEI Xuemei, SUN Yanxin. Autonomous Decision-making and Intelligent Collaboration of UAV Swarms Based on Reinforcement Learning with Sparse Rewards [J]. Acta Armamentarii, 2023, 44(6): 1537-1546. |
| [9] | ZHANG Jiandong, WANG Dinghan, YANG Qiming, SHI Guoqing, LU Yi, ZHANG Yaozhong. Multi-Dimensional Decision-Making for UAV Air Combat Based on Hierarchical Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(6): 1547-1563. |
| [10] | ZHAO Fei, LOU Wenzhong, FENG Huanzhen, SU Zilong, WANG Jinkui, XUAN Weikun. Long-Distance Aerial Target Detection Technology of Counter-UAV Image Seeker [J]. Acta Armamentarii, 2023, 44(4): 1023-1033. |
| [11] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [12] | BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game [J]. Acta Armamentarii, 2023, 44(11): 3407-3421. |
| [13] | ZHANG Qi, GE Yuxue, LI Pan, KANG Qijun, PEI Yang. Evaluation Method for SoS Contribution Rate of All-optical UAV Swarm Based on ABMS [J]. Acta Armamentarii, 2023, 44(11): 3422-3435. |
| [14] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [15] | SUN Haiwen, YU Shaozhen, JIANG Yuan, ZHOU Mo, TANG Jiayu, LI Dan. Target Threat Assessment Method for UAV Swarm at Sea [J]. Acta Armamentarii, 2022, 43(S2): 32-39. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||