
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2697-2708.doi: 10.12382/bgxb.2022.1180
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
CAO Yan1, LONG Teng1,2, SUN Jingliang1,2,*( ), ZHOU Yuze1
), ZHOU Yuze1
Received:2022-11-30
Online:2023-02-18
Contact:
SUN Jingliang
CLC Number:
CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation[J]. Acta Armamentarii, 2023, 44(9): 2697-2708.
Add to citation manager EndNote|Ris|BibTeX
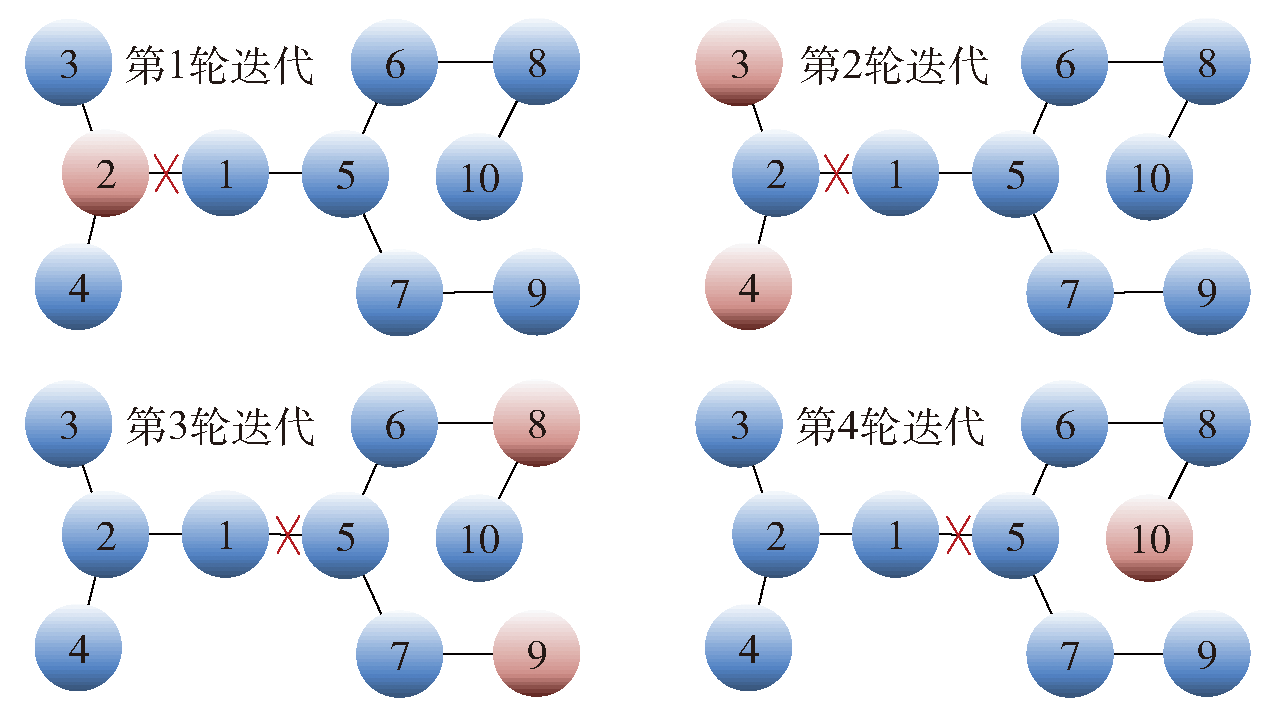
Fig.1 Package loss and corresponding estimated UAV

Fig.2 Pseudocode of LE-DTA algorithm
| 算法 | 信息包内容 | 信息包 包长/bit |
|---|---|---|
| CBBA、PI | 获胜标书列表、获胜无人机列表、时间戳列表 | 2176 |
| RS-CBBA、LE-DTA、HIPC | 获胜标书列表、获胜无人机列表、时间戳列表、各机位置坐标 | 3072 |
| DGA | 当前最优分配方案、各机位置坐标 | 2048 |
Table 1 Message content and package length of each algorithm
| 算法 | 信息包内容 | 信息包 包长/bit |
|---|---|---|
| CBBA、PI | 获胜标书列表、获胜无人机列表、时间戳列表 | 2176 |
| RS-CBBA、LE-DTA、HIPC | 获胜标书列表、获胜无人机列表、时间戳列表、各机位置坐标 | 3072 |
| DGA | 当前最优分配方案、各机位置坐标 | 2048 |
| 拓扑类型 | 无人机坐标 位置/m | 拓扑代数 连通度 | ||
|---|---|---|---|---|
| 一字型 | [300, 1500] [1100, 1500] [1900, 1500] [2700, 1500] | 0.59 | ||
| 中心辐射型 | [808, 1100] [1500, 1500] [2192, 1100] [1500, 2300] | 1 | ||
| 环型 | [1100, 1100] [1900, 1100] [1900, 1900] [1100, 1900] | 2 | ||
| 全连通型 | [1400, 1400] [1600, 1400] [1600, 1600] [1400, 1600] | 4 | ||
Table 2 UAV positions with different topologies (scenario Ⅰ)
| 拓扑类型 | 无人机坐标 位置/m | 拓扑代数 连通度 | ||
|---|---|---|---|---|
| 一字型 | [300, 1500] [1100, 1500] [1900, 1500] [2700, 1500] | 0.59 | ||
| 中心辐射型 | [808, 1100] [1500, 1500] [2192, 1100] [1500, 2300] | 1 | ||
| 环型 | [1100, 1100] [1900, 1100] [1900, 1900] [1100, 1900] | 2 | ||
| 全连通型 | [1400, 1400] [1600, 1400] [1600, 1600] [1400, 1600] | 4 | ||
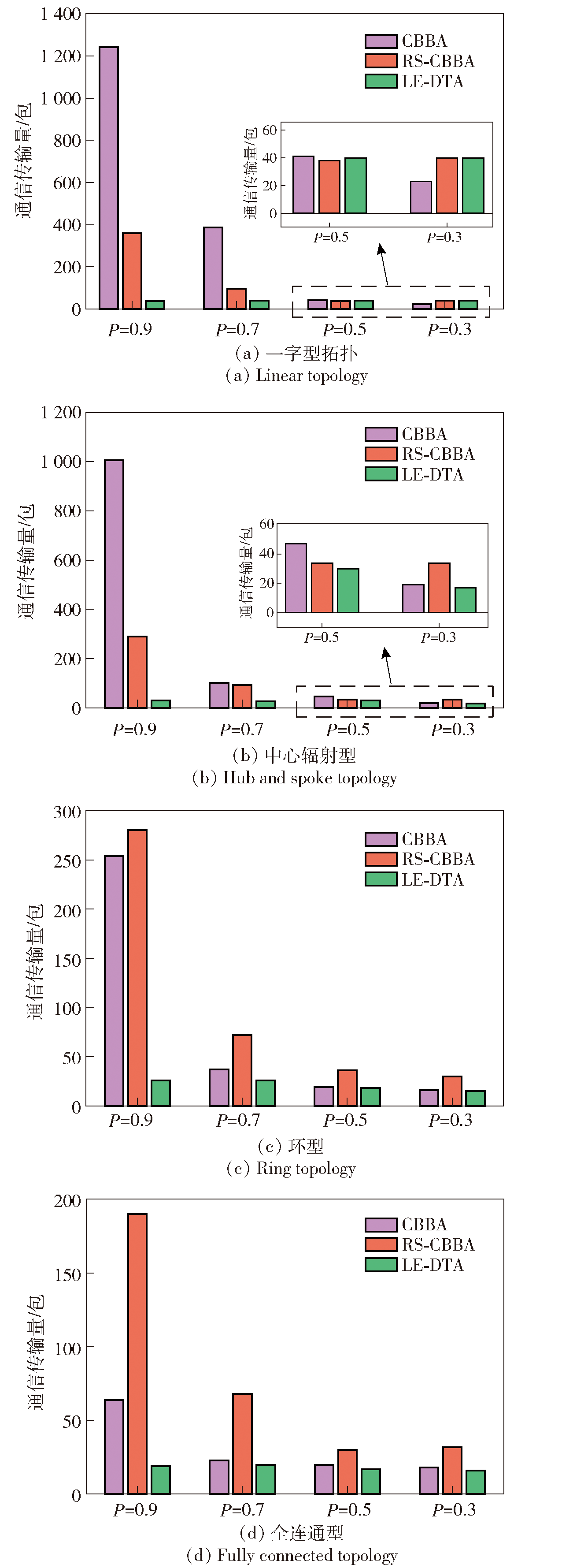
Fig.3 Comparison of communication overload (scenario Ⅰ)

Fig.4 Comparison of convergence time (scenario Ⅰ)
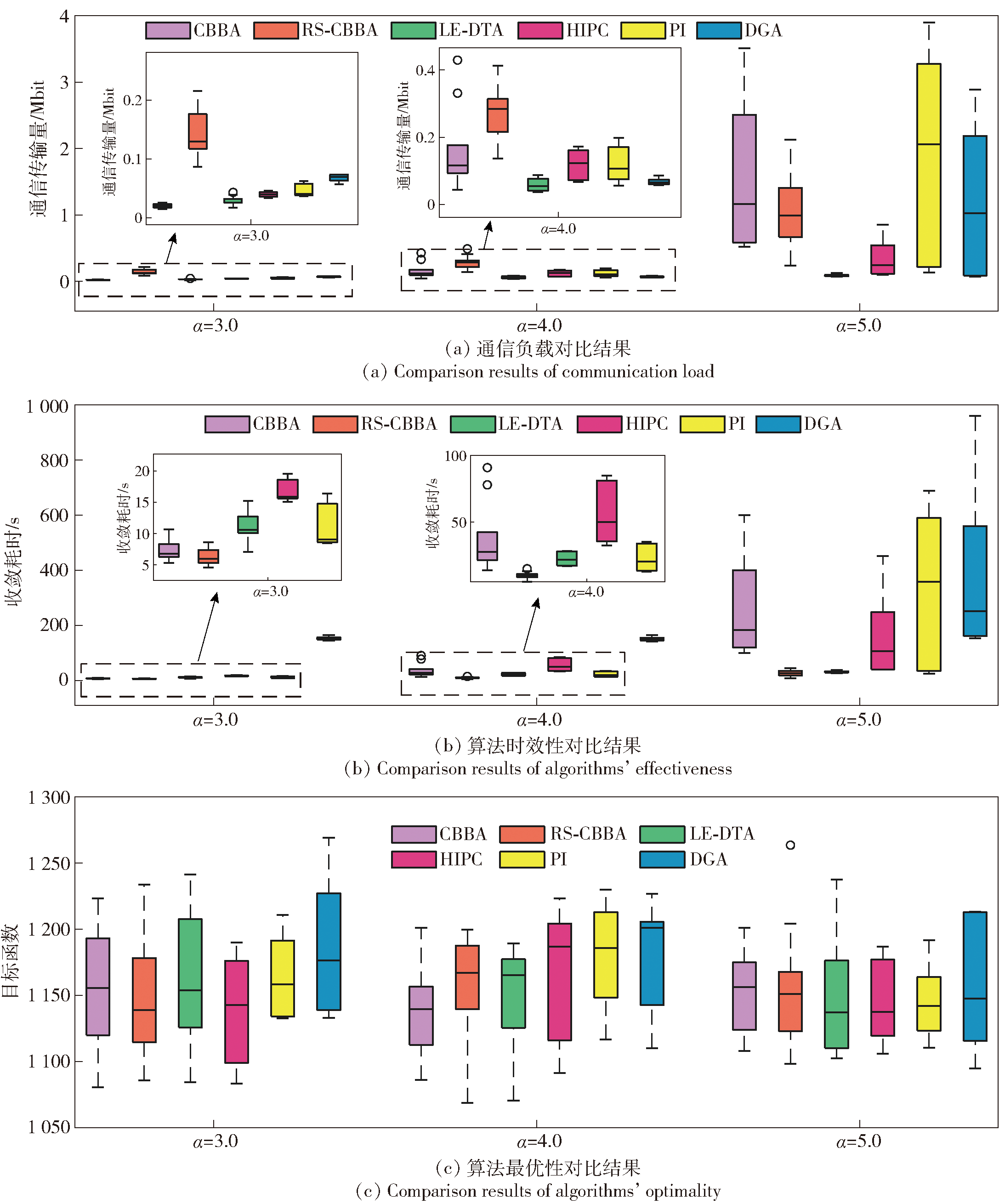
Fig.5 Comparison of algorithm performance (scenario Ⅱ)
| [1] |
甄子洋, 江驹, 孙绍山, 等. 无人机集群作战协同控制与决策[M]. 北京: 国防工业出版社, 2022.
|
|
|
|
| [2] |
范博洋, 赵高鹏, 薄煜明, 等. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44 (6): 1564-1575.
doi: 10.12382/bgxb.2022.0095 |
|
|
|
| [3] |
doi: 10.1177/0278364913496484 URL |
| [4] |
doi: 10.1109/TRO.2009.2022423 URL |
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1109/TRO.2017.2693377 URL |
| [8] |
doi: 10.1109/TCYB.2020.3042511 URL |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
陈璞, 严飞, 刘钊, 等. 通信约束下异构多无人机任务分配方法[J]. 航空学报, 2021, 42(8):306-319.
|
|
|
|
| [13] |
王孟阳, 张栋, 唐硕, 等. 基于动态联盟策略的无人机集群在线任务规划方法[J]. 兵工学报, 2022, 44(8):2207-2223.
|
|
|
|
| [14] |
王琳蒙, 王玉惠, 陈谋, 等. 基于改进麻雀算法的非完备信息博弈策略研究[J]. 吉林大学学报(信息科学版), 2022, 40(4): 589-599.
|
|
|
|
| [15] |
doi: 10.1007/s10514-019-09828-5 |
| [16] |
doi: 10.1109/TVT.2009.2015953 URL |
| [17] |
doi: 10.1109/LSP.2016. URL |
| [18] |
doi: 10.1109/ACCESS.2021.3096229 URL |
| [19] |
doi: 10.1109/Access.6287639 URL |
| [20] |
符小卫, 冯鹏, 高晓光, 等. 通信延迟约束下多无人机任务指派冲突消解[J]. 系统工程与电子技术, 2018, 40(7): 1491-1497.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1109/ACCESS.2021.3138857 URL |
| [23] |
马培蓓, 隋江波, 纪军, 等. 智能无人集群系统协同控制关键问题分析[J]. 战术导弹技术, 2022(4): 124-131.
|
|
|
|
| [24] |
doi: 10.1016/j.automatica.2020.108996 URL |
| [25] |
|
| [1] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [2] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [3] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [4] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [5] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [6] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [7] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [8] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [9] | ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces [J]. Acta Armamentarii, 2023, 44(6): 1837-1845. |
| [10] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [11] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [12] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, MOU Zhi-ying. Coalition Formation of Multiple Heterogeneous Unmanned Aerial Vehicles in Cooperative Search and Attack in UnknownEnvironment [J]. Acta Armamentarii, 2015, 36(12): 2284-2297. |
| [13] | TANG Chuan-lin,HUANG Chang-qiang,DU Hai-wen,HUANG Han-qiao,DING Da-li,LUO Chang. Study of Trajectory Planning for UCAV Formation Cooperative Attack [J]. Acta Armamentarii, 2014, 35(4): 523-530. |
| [14] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, XI Wen-qing. Three-dimensional Path tracking Guidance and Control for Unmanned Aerial Vehicle Based on Back-stepping andNonlinear Dynamic Inversion [J]. Acta Armamentarii, 2014, 35(12): 2030-2040. |
| [15] | HUANG Chang-qiang, TANG Chuan-lin, HUANG Han-qiao, WANG Yong, DU Hai-wen. Mission Decision-Making Method of UAV Considering Target Importance and Historical Mission Trust Value [J]. Acta Armamentarii, 2013, 34(3): 339-345. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||