
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3295-3309.doi: 10.12382/bgxb.2023.0810
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LI Jiajian1,2, SHI Yanjun1,2,*( ), YANG Yu1,3, LI Bo3,4, ZHAO Xijun3,4
), YANG Yu1,3, LI Bo3,4, ZHAO Xijun3,4
Received:2023-08-29
Online:2023-11-05
Contact:
SHI Yanjun
CLC Number:
LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks[J]. Acta Armamentarii, 2023, 44(11): 3295-3309.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Urban air-ground collaborative reconnaissance combat mission demand
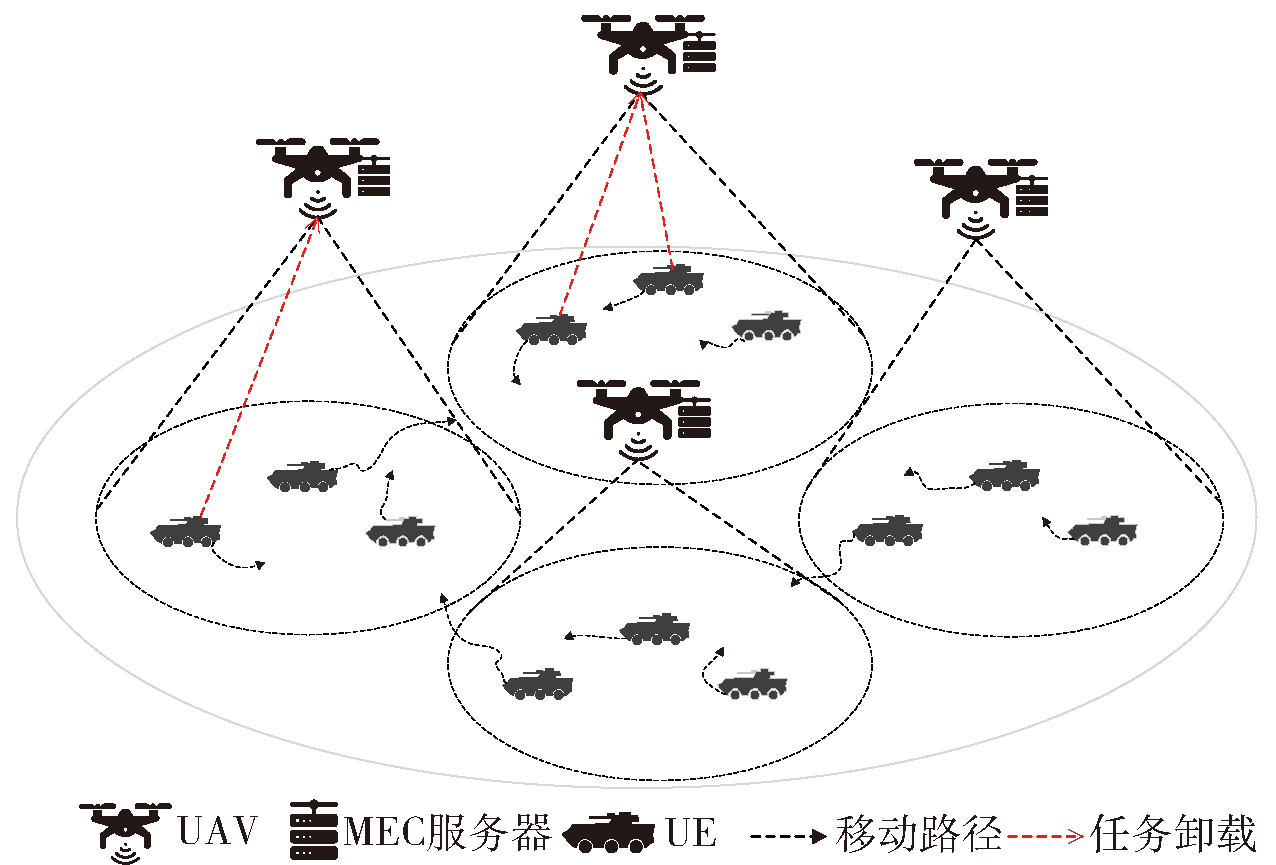
Fig.2 UAV cluster-assisted MEC system for task offloading
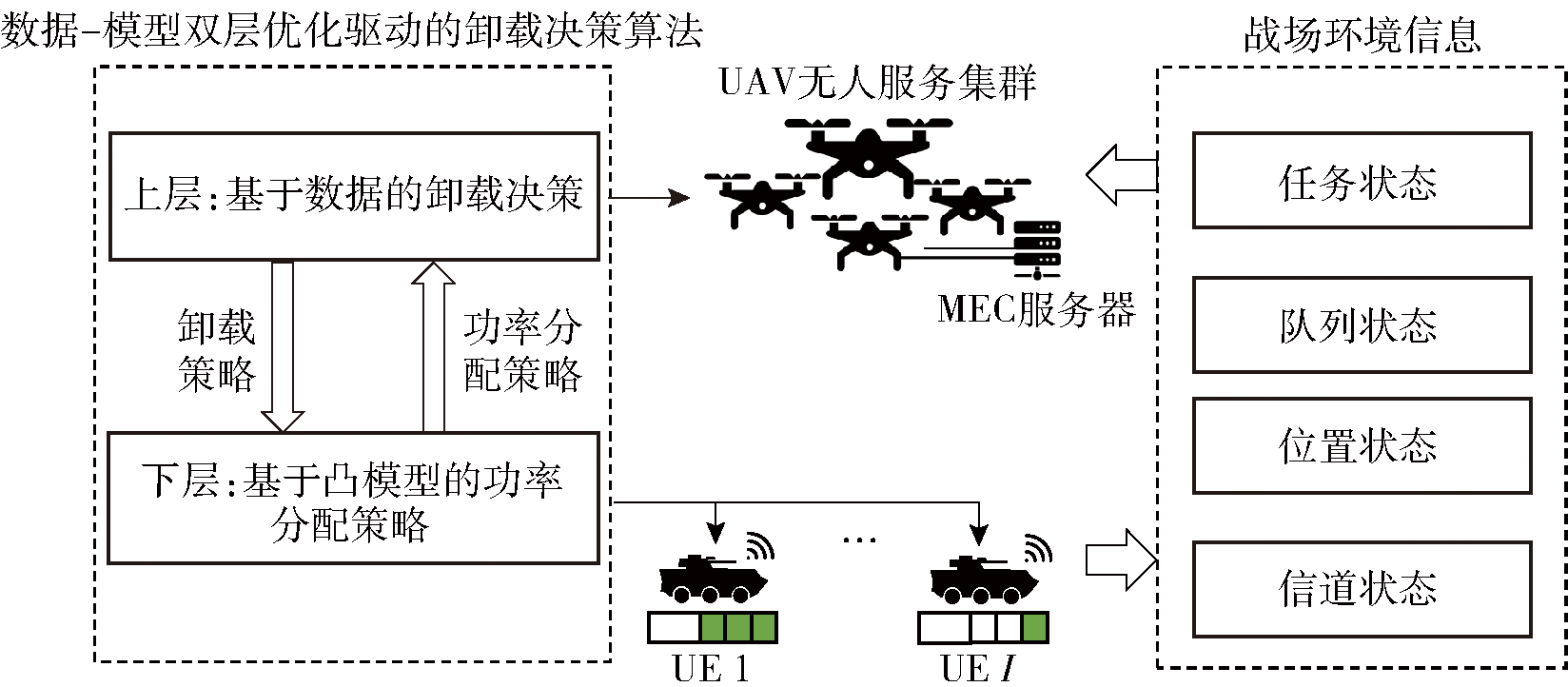
Fig.3 Framework of offloading decision optimization algorithm based on multi-agent reinforcement learning
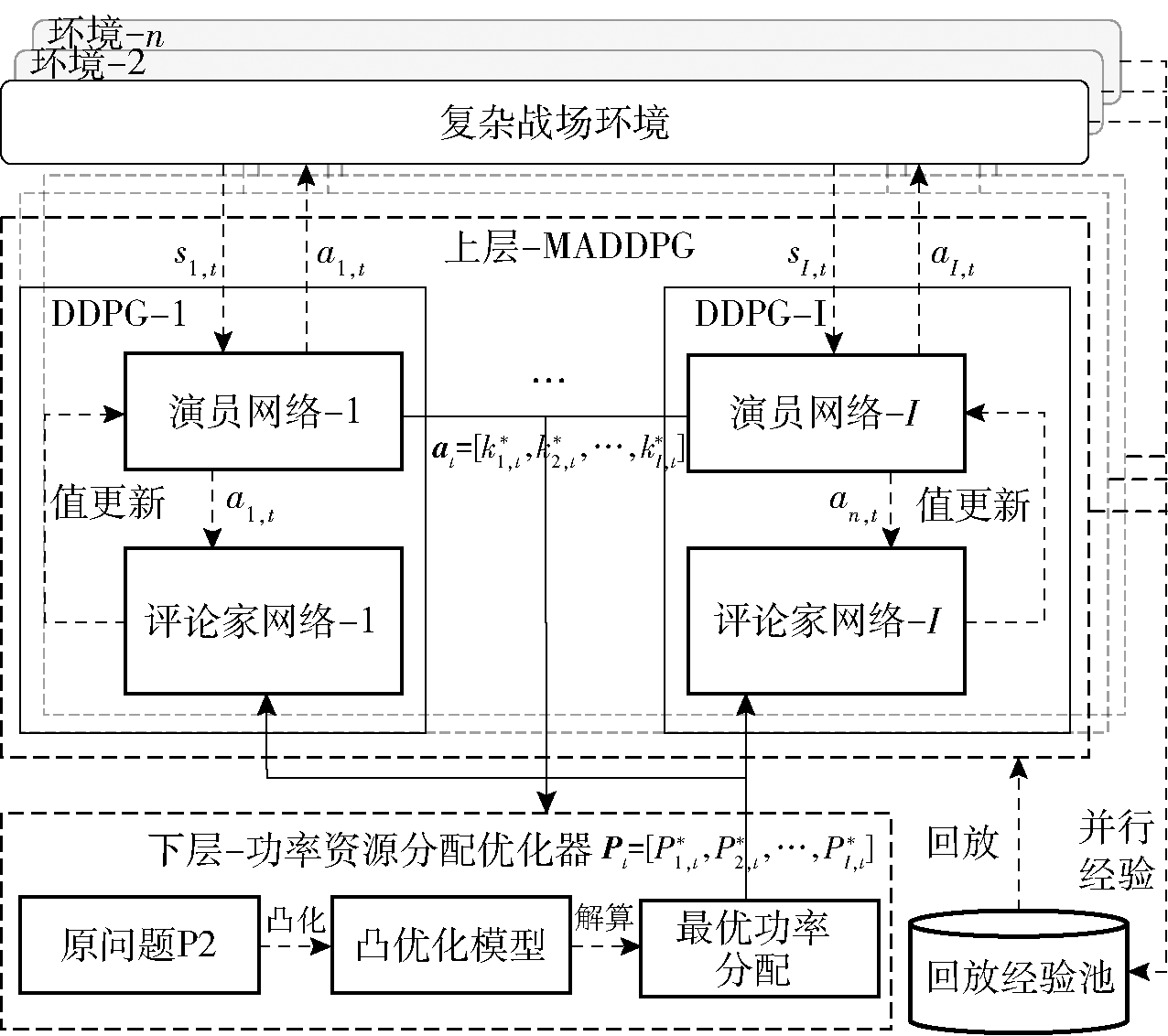
Fig.4 Dataflow of O-MADDPG algorithm driven by two-layer optimization
| 参数 | 默认值 |
|---|---|
| UE数量N/个 | 5 |
| UAV数量K/个 | 4 |
| 无人机通信半径L/m | 250 |
| 无人机悬停高度H/m | 15 |
| 每个UAU信道带宽B/MHz | 1 |
| 白噪声功率σ0/dBm | -113 |
| UE计算频率fl/GHz | 2.4 |
| UAV计算频率fe/GHz | 24 |
| 平均能量Eavg/J | 0.5 |
| UE执行1bit所需的CPU时钟周期Xl/(cycle·bit-1) | 5000 |
| UAV执行1bit所需的CPU时钟周期Xe/(cycle·bit-1) | 5000 |
| 时隙任务所需的计算量Ai,t | [5000, 40000] |
| 时隙任务卸载时所需传输的数据量Li,t | [5000, 10000] |
| 容忍时延 /s | 0.006 |
| 系统周期T/min | 10 |
| 时隙长度τ/s | 0.002 |
| 有效电容常数κ | 10-28 |
| Lyapunov权重V | 0.001 |
Table 1 Setting of simulation parameters
| 参数 | 默认值 |
|---|---|
| UE数量N/个 | 5 |
| UAV数量K/个 | 4 |
| 无人机通信半径L/m | 250 |
| 无人机悬停高度H/m | 15 |
| 每个UAU信道带宽B/MHz | 1 |
| 白噪声功率σ0/dBm | -113 |
| UE计算频率fl/GHz | 2.4 |
| UAV计算频率fe/GHz | 24 |
| 平均能量Eavg/J | 0.5 |
| UE执行1bit所需的CPU时钟周期Xl/(cycle·bit-1) | 5000 |
| UAV执行1bit所需的CPU时钟周期Xe/(cycle·bit-1) | 5000 |
| 时隙任务所需的计算量Ai,t | [5000, 40000] |
| 时隙任务卸载时所需传输的数据量Li,t | [5000, 10000] |
| 容忍时延 /s | 0.006 |
| 系统周期T/min | 10 |
| 时隙长度τ/s | 0.002 |
| 有效电容常数κ | 10-28 |
| Lyapunov权重V | 0.001 |
| 网络 | 数值 | 超参数 | 数值 |
|---|---|---|---|
| fc(state_dim, 64), relu | 学习率 | 0.005 | |
| fc(64,64), relu | 批大小 | 1024 | |
| 演员 | fc(64,1), tanh | 回放池容量 | 100000 |
| fc(state_dim, 64), relu | 折扣因子 | 0.95 | |
| 评论家 | fc(64,64), relu | 软更新温度因子 | 0.01 |
| fc(64,1), tanh | 软更新间隔 | 1024 |
Table 2 Parameter settings of actor-critic networks
| 网络 | 数值 | 超参数 | 数值 |
|---|---|---|---|
| fc(state_dim, 64), relu | 学习率 | 0.005 | |
| fc(64,64), relu | 批大小 | 1024 | |
| 演员 | fc(64,1), tanh | 回放池容量 | 100000 |
| fc(state_dim, 64), relu | 折扣因子 | 0.95 | |
| 评论家 | fc(64,64), relu | 软更新温度因子 | 0.01 |
| fc(64,1), tanh | 软更新间隔 | 1024 |
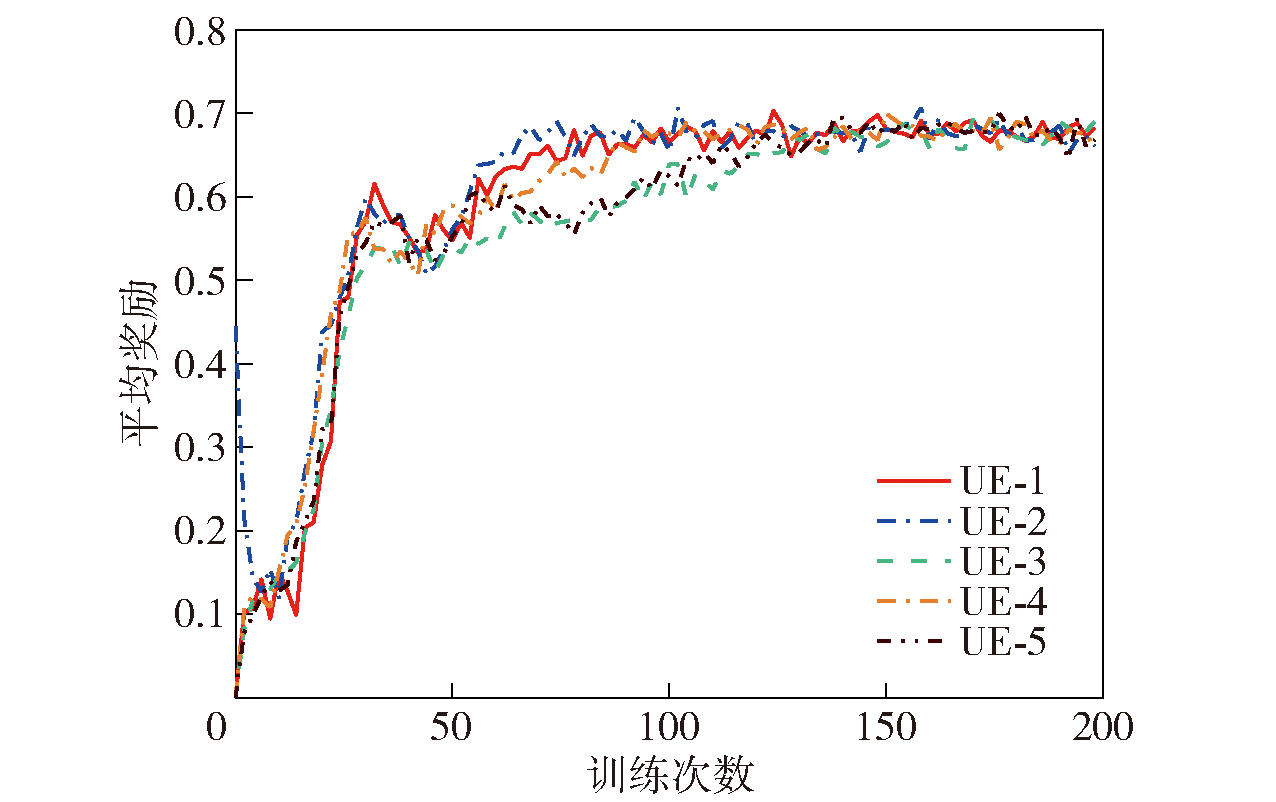
Fig.5 Reward curves for all UEs under O-MADDPG algorithm
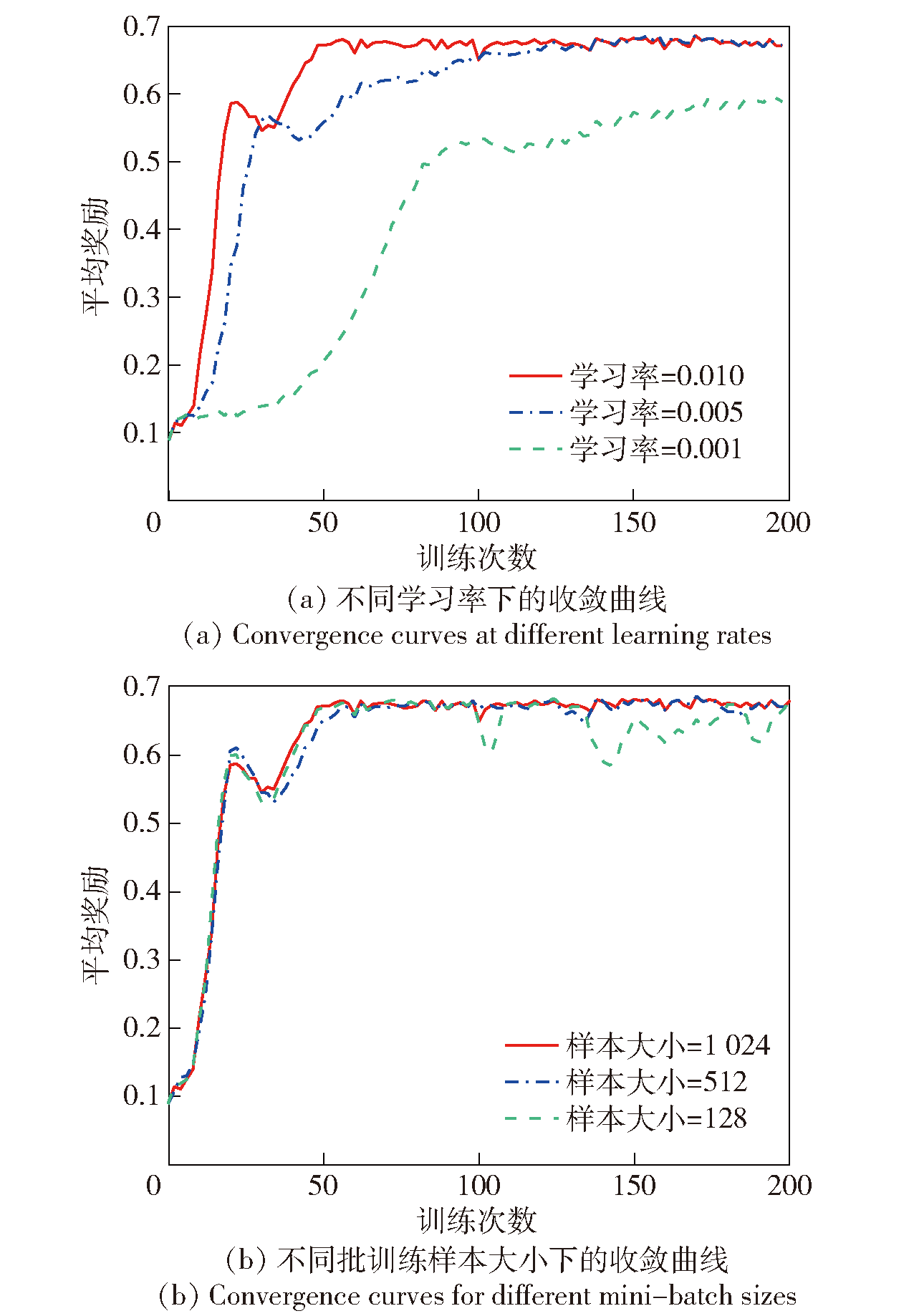
Fig.6 Training efficiency of O-MADDPG under different training parameter settings
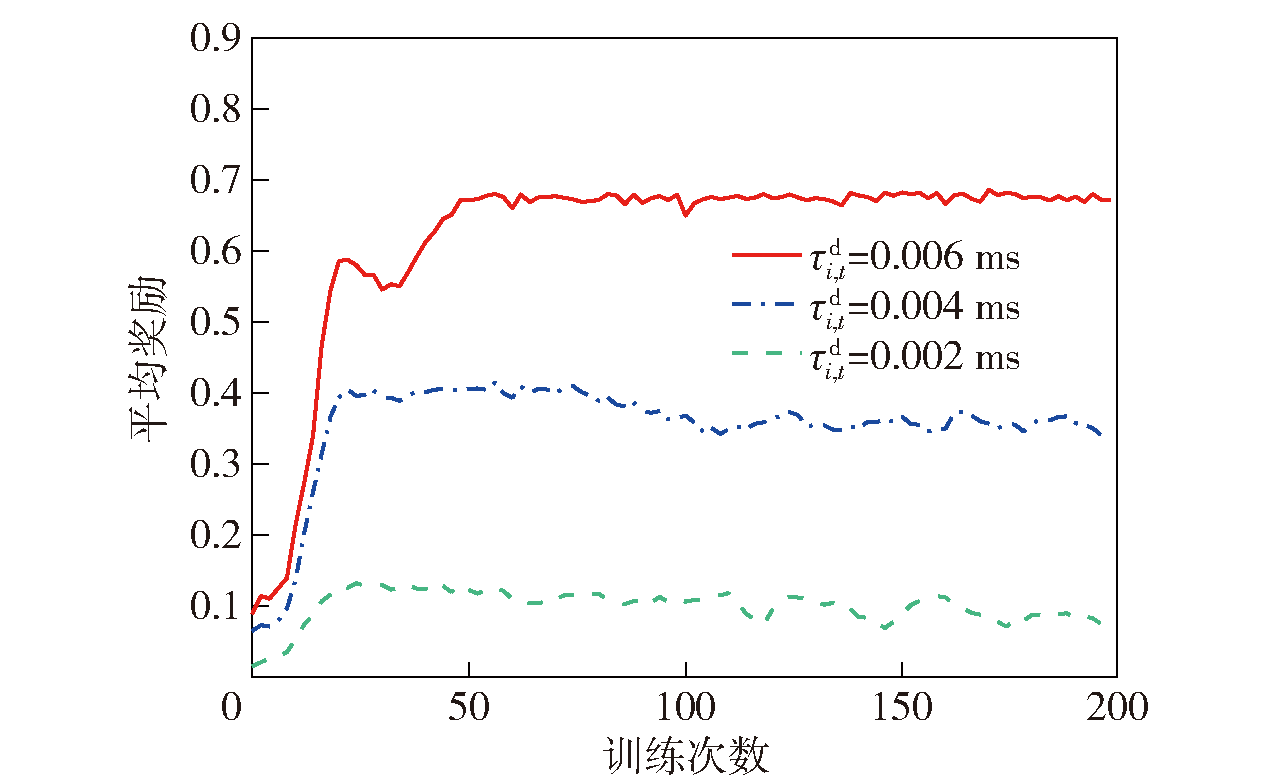
Fig.7 Convergence curves of O-MADDPG under different tolerance delay settings
| 组 | 训练 次数 | 任务失败率/% | 任务处理时延/ms | 系统能耗/J | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| O-MADDPG | V-MADDPG | O-DDQN | O-MADDPG | V-MADDPG | O-DDQN | O-MADDPG | V-MADDPG | O-DDQN | ||
| 1 | 1 | 6.418 | 3.893 | 27.264 | 3.817 | 3.611 | 5.204 | 0.8797 | 0.7089 | 1.3690 |
| 2 | 51 | 0.418 | 8.759 | 0.660 | 3.884 | 3.723 | 4.691 | 0.0054 | 0.1727 | 0.0066 |
| 3 | 101 | 0.385 | 11.897 | 0.649 | 3.757 | 3.616 | 4.692 | 0.0052 | 0.2807 | 0.0065 |
| 4 | 150 | 0.386 | 14.437 | 0.648 | 3.757 | 3.591 | 4.688 | 0.0052 | 0.5372 | 0.0065 |
| 5 | 201 | 0.362 | 13.867 | 0.649 | 3.655 | 3.574 | 4.691 | 0.0051 | 0.3072 | 0.0065 |
| 6 | 251 | 0.372 | 13.804 | 0.647 | 3.698 | 3.486 | 4.678 | 0.0051 | 0.3296 | 0.0065 |
| 均值 | 1.390 | 11.109 | 5.086 | 3.761 | 3.600 | 4.774 | 0.151 | 0.3894 | 0.234 | |
Table 3 Analysis of simulated results
| 组 | 训练 次数 | 任务失败率/% | 任务处理时延/ms | 系统能耗/J | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| O-MADDPG | V-MADDPG | O-DDQN | O-MADDPG | V-MADDPG | O-DDQN | O-MADDPG | V-MADDPG | O-DDQN | ||
| 1 | 1 | 6.418 | 3.893 | 27.264 | 3.817 | 3.611 | 5.204 | 0.8797 | 0.7089 | 1.3690 |
| 2 | 51 | 0.418 | 8.759 | 0.660 | 3.884 | 3.723 | 4.691 | 0.0054 | 0.1727 | 0.0066 |
| 3 | 101 | 0.385 | 11.897 | 0.649 | 3.757 | 3.616 | 4.692 | 0.0052 | 0.2807 | 0.0065 |
| 4 | 150 | 0.386 | 14.437 | 0.648 | 3.757 | 3.591 | 4.688 | 0.0052 | 0.5372 | 0.0065 |
| 5 | 201 | 0.362 | 13.867 | 0.649 | 3.655 | 3.574 | 4.691 | 0.0051 | 0.3072 | 0.0065 |
| 6 | 251 | 0.372 | 13.804 | 0.647 | 3.698 | 3.486 | 4.678 | 0.0051 | 0.3296 | 0.0065 |
| 均值 | 1.390 | 11.109 | 5.086 | 3.761 | 3.600 | 4.774 | 0.151 | 0.3894 | 0.234 | |
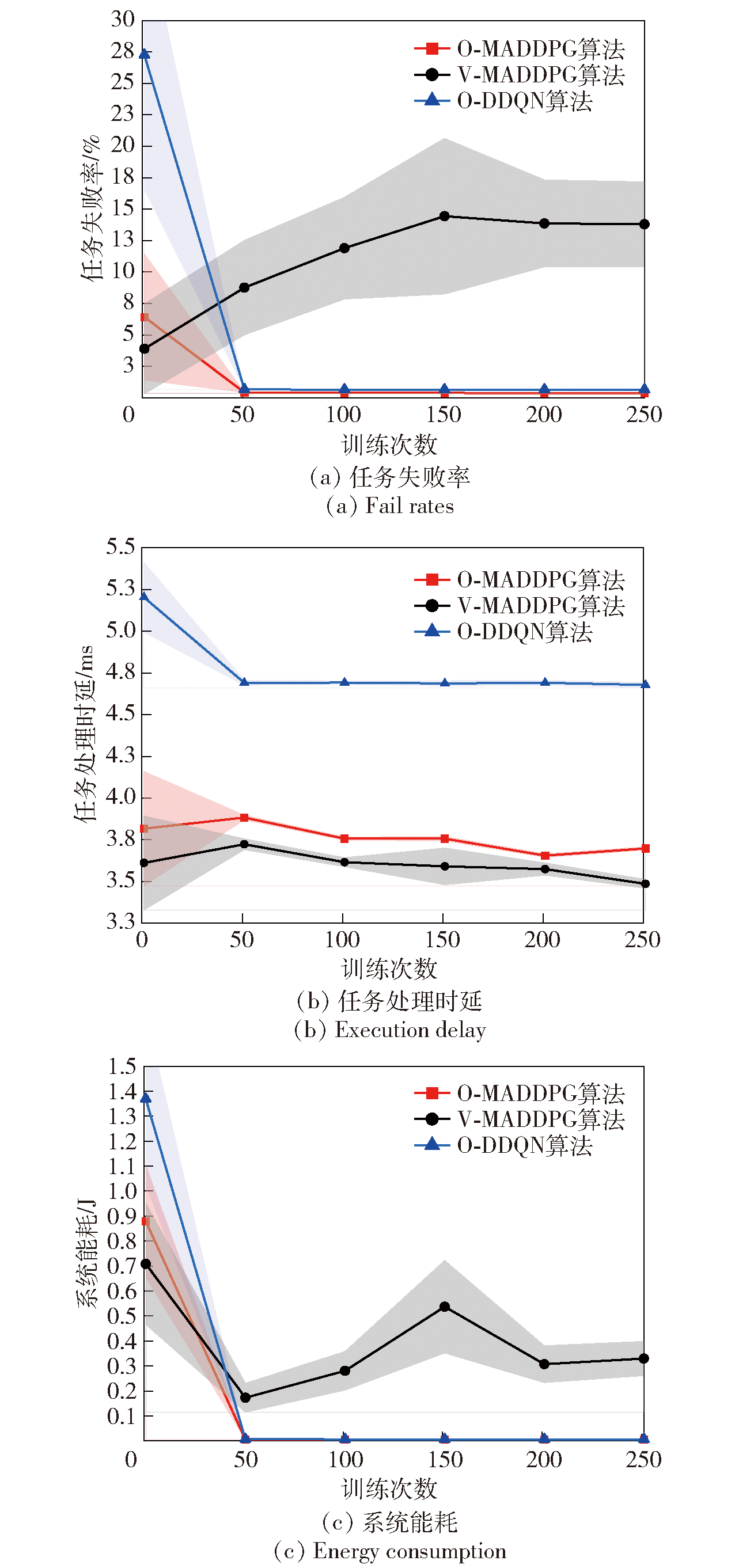
Fig.8 Comparison of MEC performance under different algorithms
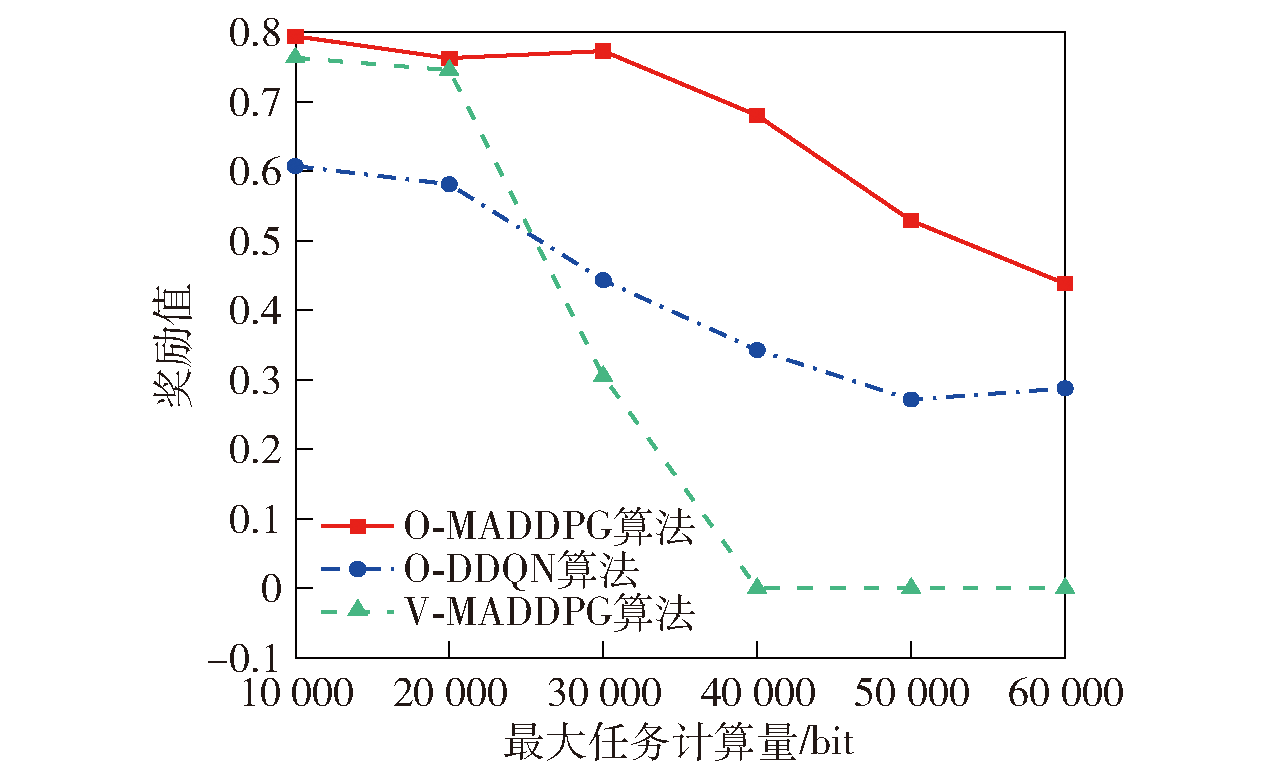
Fig.9 Reward performances of different algorithms with varying task computational load

Fig.10 Comparison of MEC performance between O-MADDPG algorithm and different offloading modes
| [1] |
李超, 王瑞星, 黄建忠, 等. 稀疏奖励下基于强化学习的无人集群自主决策与智能协同[J]. 兵工学报, 2023, 44(6): 1537-1546.
doi: 10.12382/bgxb.2022.0177 |
|
doi: 10.12382/bgxb.2022.0177 |
|
| [2] |
吕震华, 高亢. 美国无人集群城市作战应用发展综述[J]. 中国电子科学研究院学报, 2020, 15(8):738-745.
|
|
|
|
| [3] |
胡鹏林, 赵春晖, 胡劲文, 等. 拒止环境无人机集群协同感知与自主控制[C]// 第40届中国控制会议论文集(15). 上海: CNKI, 2021: 728-733.
|
|
|
|
| [4] |
孙立健, 周鋆, 朱承, 等. 马赛克战兵力设计下的边缘指挥与控制组织结构[J]. 指挥与控制学报, 2022, 8(2):141-149.
|
|
|
|
| [5] |
doi: 10.1109/MCE.2016.2590118 URL |
| [6] |
陈霄, 王潋, 刘巍, 等. 美军机动边缘信息服务能力现状概述[J]. 电光与控制, 2021, 28(7): 62-67.
|
|
|
|
| [7] |
陈霄, 刘巍, 夏淋淋, 等. 边缘计算军事应用需求及作战运用构想[J]. 火力与指挥控制, 2021, 46(8):1-4.
|
|
|
|
| [8] |
薛建强, 史彦军, 李波. 面向无人集群的边缘计算技术综述[J]. 兵工学报, 2023, 44(9):2546-2555.
doi: 10.12382/bgxb.2022.1209 |
|
|
|
| [9] |
王万斌. 面向战术智能终端任务的移动边缘计算卸载策略研究[D]. 成都: 电子科技大学, 2022.
|
|
|
|
| [10] |
doi: 10.1007/s12083-021-01160-z |
| [11] |
doi: 10.1109/JIOT.2022.3182119 URL |
| [12] |
缪家辉, 郑镐, 谢正昊, 等. 数字孪生辅助UAV网络计算卸载优化[J/OL]. 北京邮电大学学报, 2022, 45(6):133-139. DOI:10.13190/j.jbupt.2022-181.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
赵晓焱, 韩威, 张俊娜, 等. 基于异步深度强化学习的车联网协作卸载策略[J/OL]. 计算机应用. 2023:1-11,DOI:10.11772/j.issn.1001-9081.2023050788.
|
|
|
|
| [16] |
doi: 10.1109/TVT.2022.3197627 URL |
| [17] |
刘晓宇, 许驰, 曾鹏, 等. 面向异构工业任务高并发计算卸载的深度强化学习算法[J]. 计算机学报, 2021, 44(12):2367-2381.
|
|
|
|
| [18] |
doi: 10.1371/journal.pone.0172395 URL |
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
doi: 10.1109/TVT.25 URL |
| [23] |
|
| [24] |
|
| [25] |
doi: 10.1016/j.comcom.2022.06.017 URL |
| [26] |
苏维亚, 徐飞, 王森. 基于改进MADDPG的UAV轨迹和计算卸载联合优化算法[J/OL]. 计算机系统应用, 2023, 32(11). DOI: 10.15888/j.cnki.csa.009277.
|
|
|
|
| [27] |
李慧. 基于强化学习的无人机用户自适应边缘计算卸载策略研究[D]. 深圳: 哈尔滨工业大学(深圳), 2021.
|
|
|
|
| [28] |
doi: 10.1016/j.adhoc.2022.102981 URL |
| [29] |
doi: 10.1109/TSIPN.2022.3150911 URL |
| [30] |
|
| [31] |
栗志. 基于MEC的计算卸载及资源分配算法研究[D]. 南京: 南京邮电大学, 2021.
|
|
|
|
| [32] |
doi: 10.1109/TVT.2021.3102161 URL |
| [33] |
杨力, 马伟东, 郭江宇, 等. 陆战场中的计算卸载和资源分配[J]. 火力与指挥控制, 2023, 48(4):17-23,31.
|
|
|
| [1] | YAN Yuwen, BI Wenhao, ZHANG An, ZHANG Baichuan. Task Allocation Method of UAV Clusters Based on Sequence Generative Adversarial Network [J]. Acta Armamentarii, 2023, 44(9): 2672-2684. |
| [2] | QUAN Shenming, WANG Zhu, CHAO Tao, YANG Ming. Fast Deorbit Guidance Method Based on Virtual Reentry Angle [J]. Acta Armamentarii, 2023, 44(3): 865-875. |
| [3] | BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game [J]. Acta Armamentarii, 2023, 44(11): 3407-3421. |
| [4] | HUANG Zhong-rui, ZHOU Qing-song, ZHANG Jian-yun. Waveform Design of MIMO Radar Based on Transmitting Pattern Synthesis [J]. Acta Armamentarii, 2016, 37(5): 851-858. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||