
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2836-2848.doi: 10.12382/bgxb.2022.0760
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
HUANG Feng, WANG Weixiong, LIN Zhonglin*( ), WU Xianyu, ZHUANG Jiaquan
), WU Xianyu, ZHUANG Jiaquan
Received:2022-08-31
Online:2023-02-12
Contact:
LIN Zhonglin
CLC Number:
HUANG Feng, WANG Weixiong, LIN Zhonglin, WU Xianyu, ZHUANG Jiaquan. Design and Experimental Study of a Novel Semi-physical Simulation Platform for Visual Navigation of Quadrotor UAVs[J]. Acta Armamentarii, 2023, 44(9): 2836-2848.
Add to citation manager EndNote|Ris|BibTeX
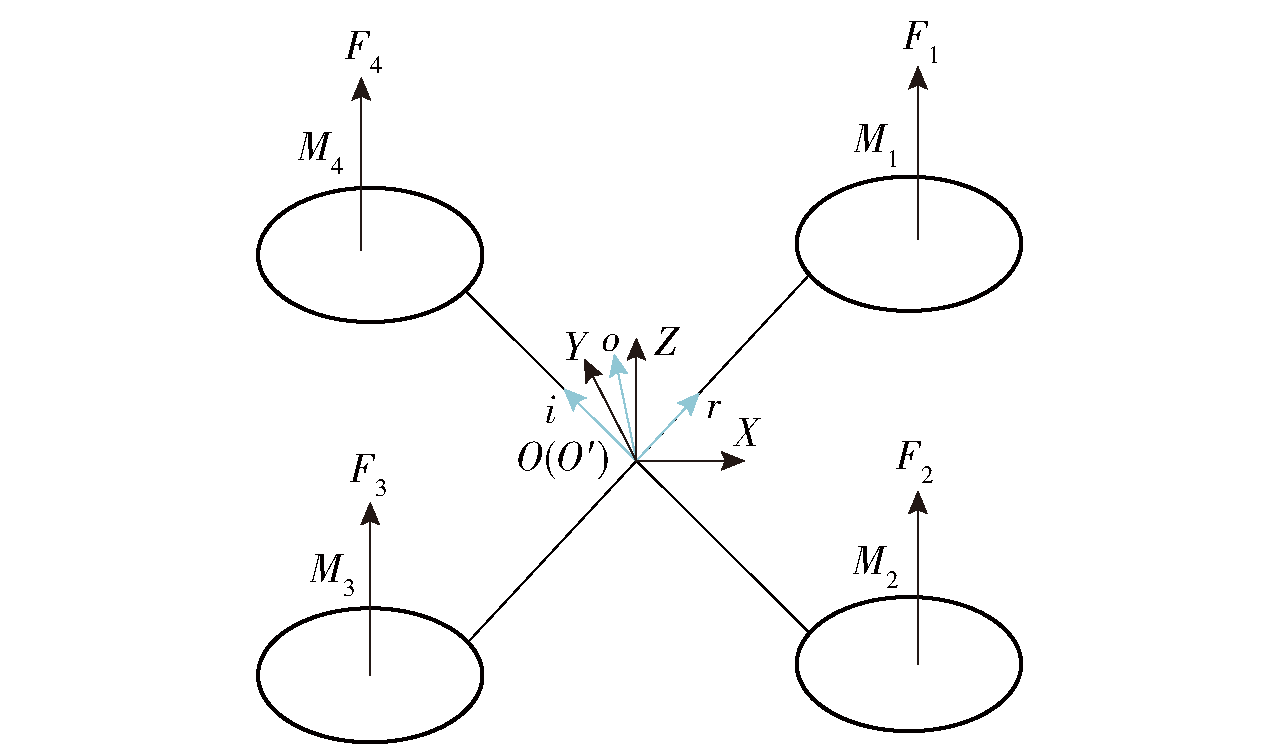
Fig.1 Mechanical analysis of a quadrotor UAV

Fig.2 Mechanical structure

Fig.3 Turntable mechanical structure
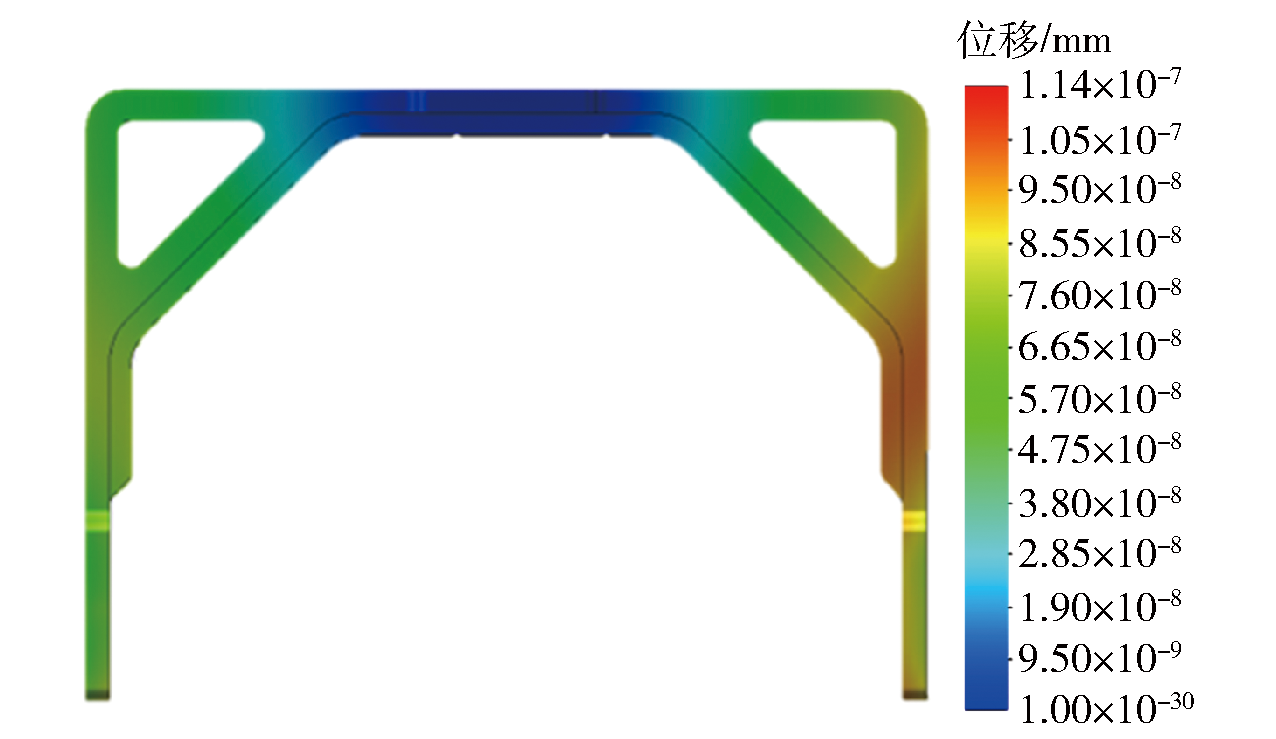
Fig.4 Analysis of mechanical properties of the yaw shaft frame
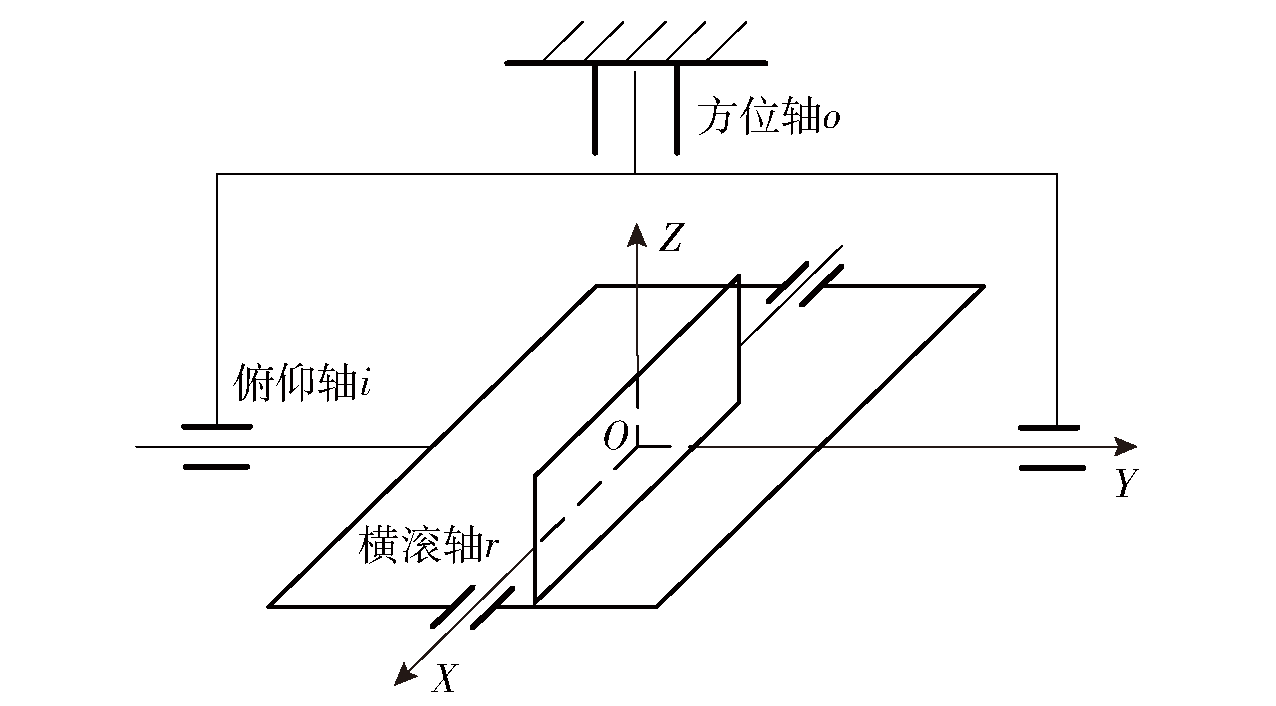
Fig.5 Structure of the three-axis flight turntable
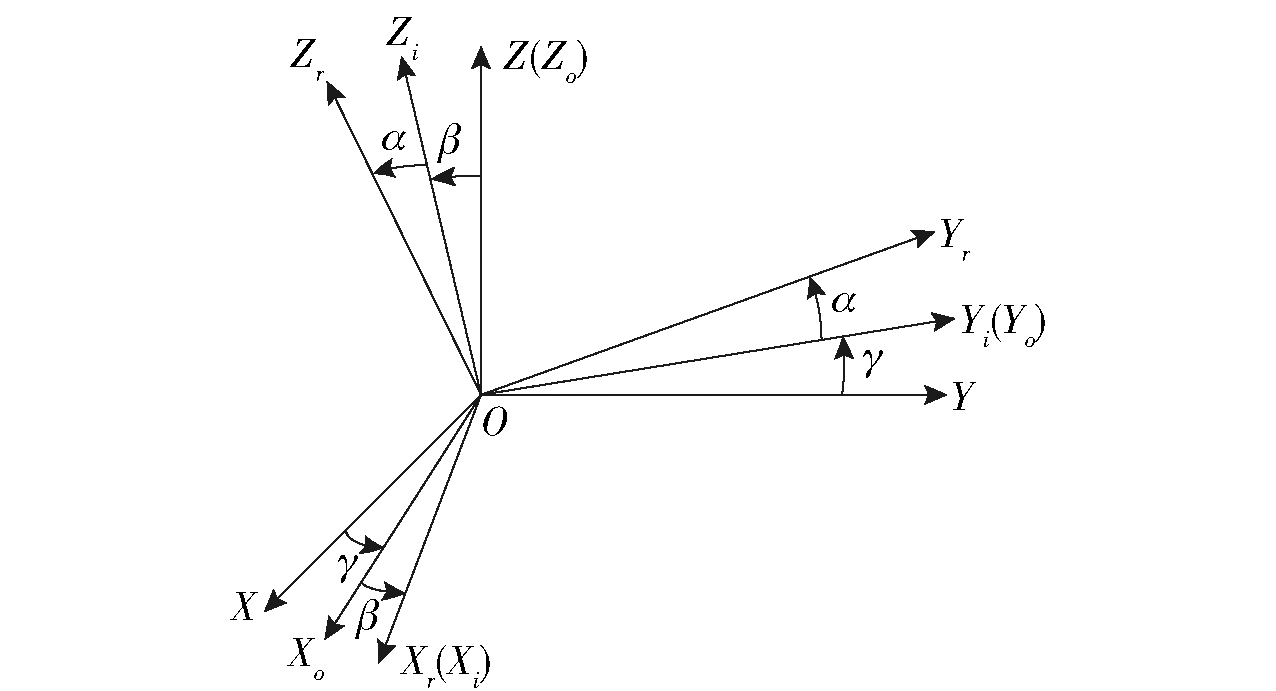
Fig.6 Coordinate transformation of the three-axis rotary table
| 转台坐标轴 | 转动惯量J/(kg·mm2) | ||
|---|---|---|---|
| X轴 | Y轴 | Z轴 | |
| r轴 | 0.6512 | 0.6495 | 0.6295 |
| i轴 | 0.1657 | 0.1635 | 0.3191 |
| o轴 | 0.7198 | ||
Table 1 Approximate of the oment of inertia of the three axes relative to each axis of rotation
| 转台坐标轴 | 转动惯量J/(kg·mm2) | ||
|---|---|---|---|
| X轴 | Y轴 | Z轴 | |
| r轴 | 0.6512 | 0.6495 | 0.6295 |
| i轴 | 0.1657 | 0.1635 | 0.3191 |
| o轴 | 0.7198 | ||
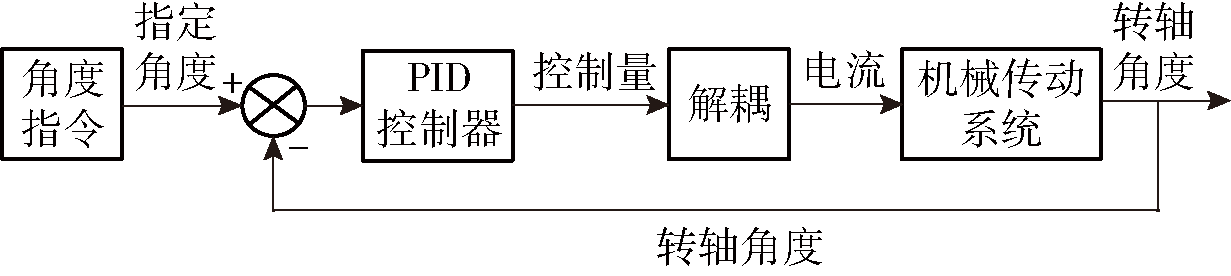
Fig.7 Decoupling control schemes

Fig.8 Overall architecture of the control system
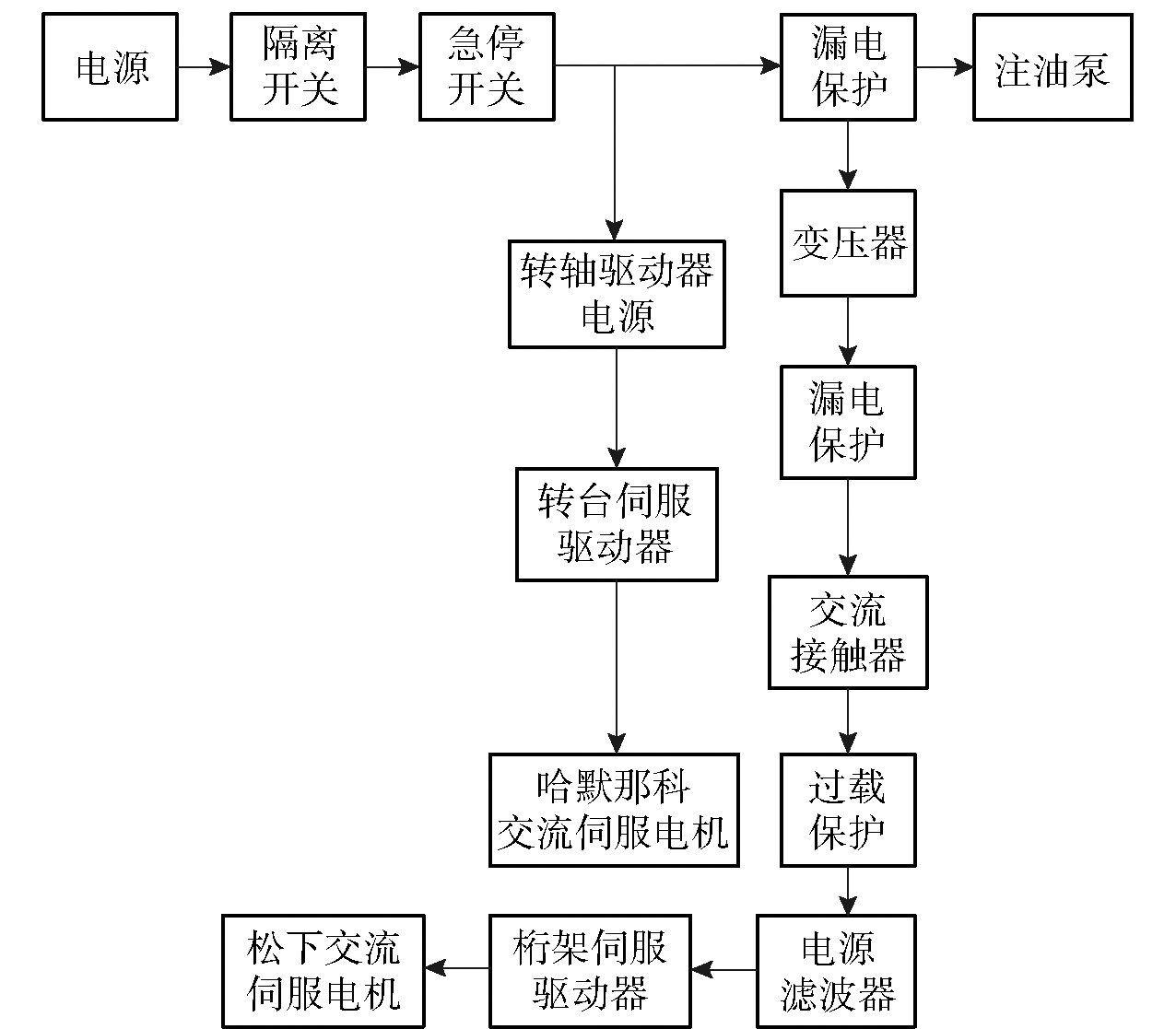
Fig.9 Schematic diagram of electrical connections
| 设计参数 | X轴 | Y轴 | Z轴 |
|---|---|---|---|
| 最大速度/(mm·s-1) | 1000 | 1000 | 1000 |
| 最大加速度/(mm·s-2) | 1000 | 1000 | 1000 |
| 线性负载/N | 1643.5 | 775.1 | 2918.7 |
Table 2 Main parameters of the three-axis truss
| 设计参数 | X轴 | Y轴 | Z轴 |
|---|---|---|---|
| 最大速度/(mm·s-1) | 1000 | 1000 | 1000 |
| 最大加速度/(mm·s-2) | 1000 | 1000 | 1000 |
| 线性负载/N | 1643.5 | 775.1 | 2918.7 |
| 设计参数 | o轴 | r轴 | i轴 |
|---|---|---|---|
| 最大速度/((°)·s-1) | 20 | 20 | 20 |
| 最大加速度/((°)·s-2) | 20 | 20 | 20 |
| 线性负载/(kg·mm2) | 1.04 | 0.66 | 0.81 |
Table 3 Main parameters of the three-axis rotary table
| 设计参数 | o轴 | r轴 | i轴 |
|---|---|---|---|
| 最大速度/((°)·s-1) | 20 | 20 | 20 |
| 最大加速度/((°)·s-2) | 20 | 20 | 20 |
| 线性负载/(kg·mm2) | 1.04 | 0.66 | 0.81 |

Fig.10 Physical diagram of the system
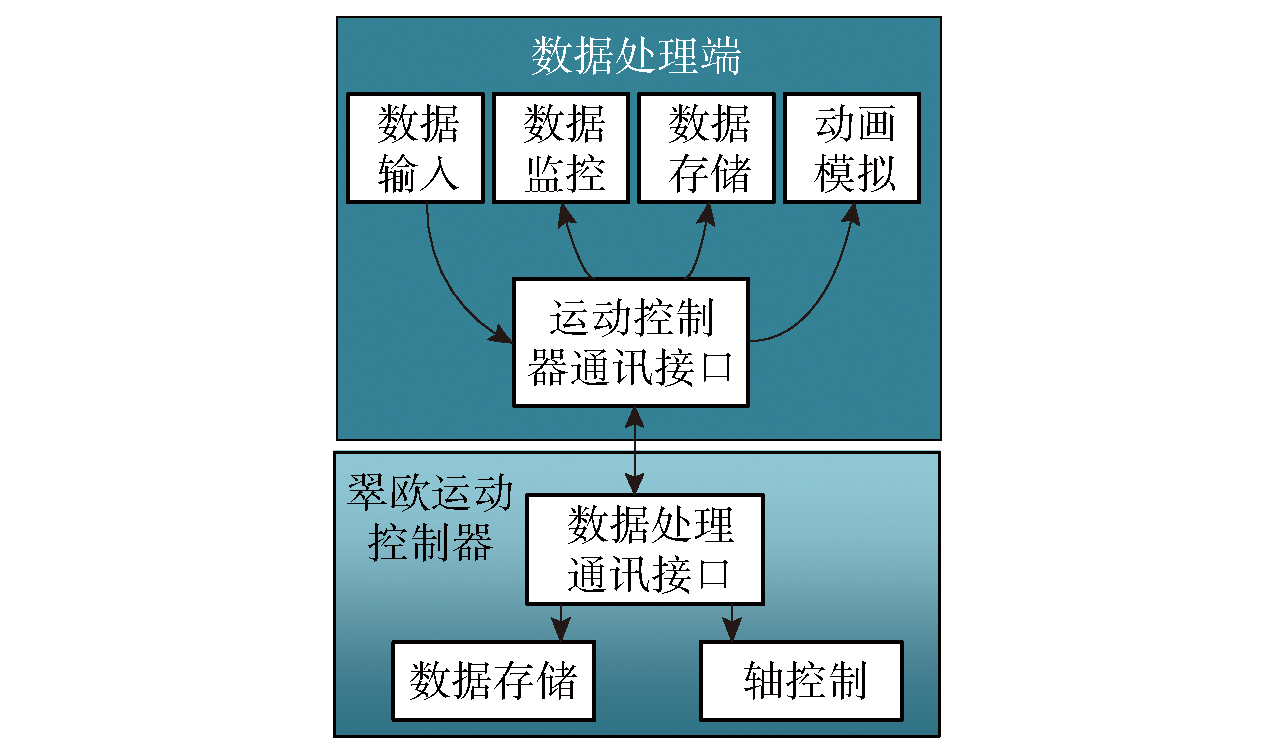
Fig.11 Software architecture

Fig.12 Real-time animation simulation
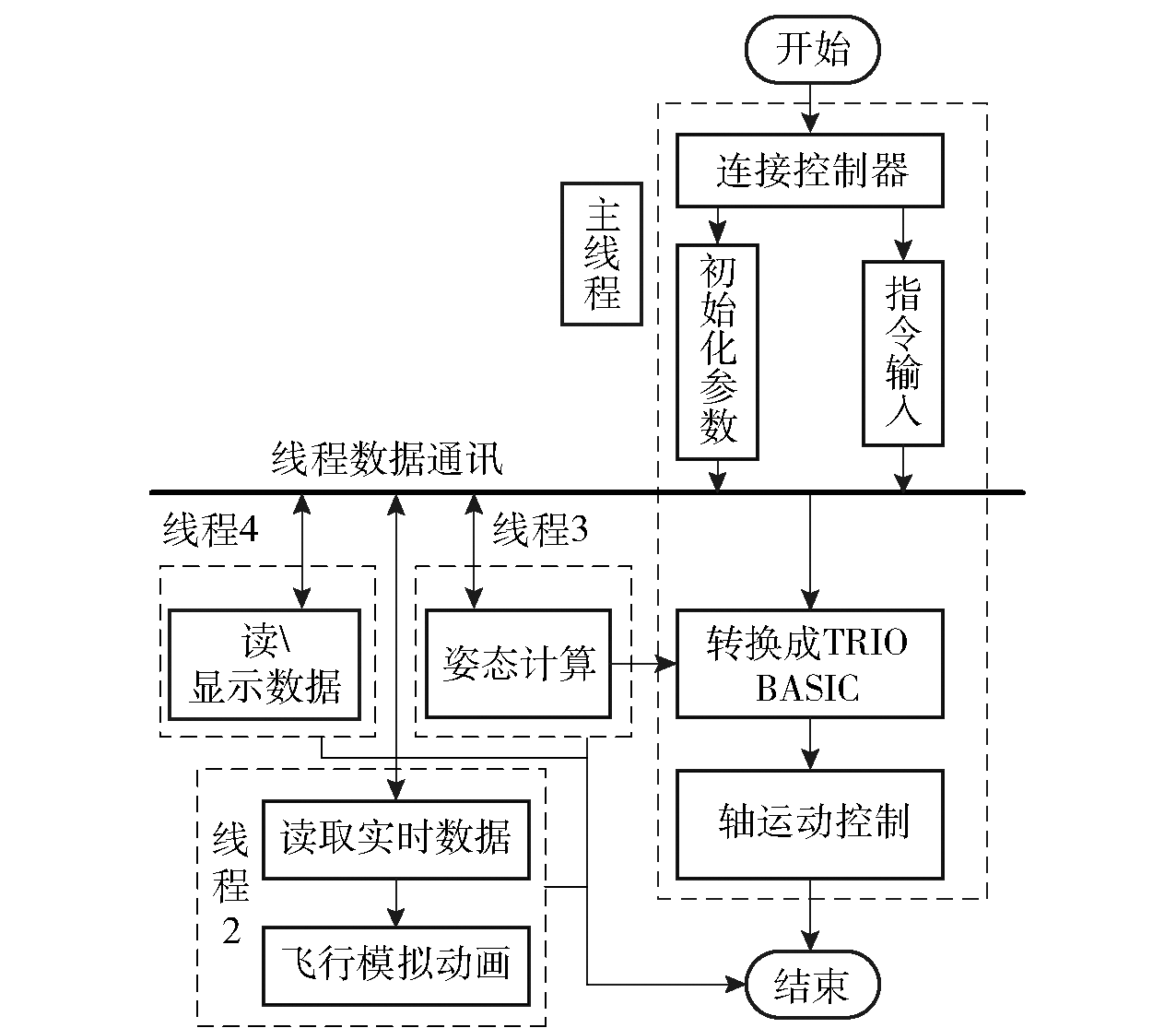
Fig.13 Software flowchart
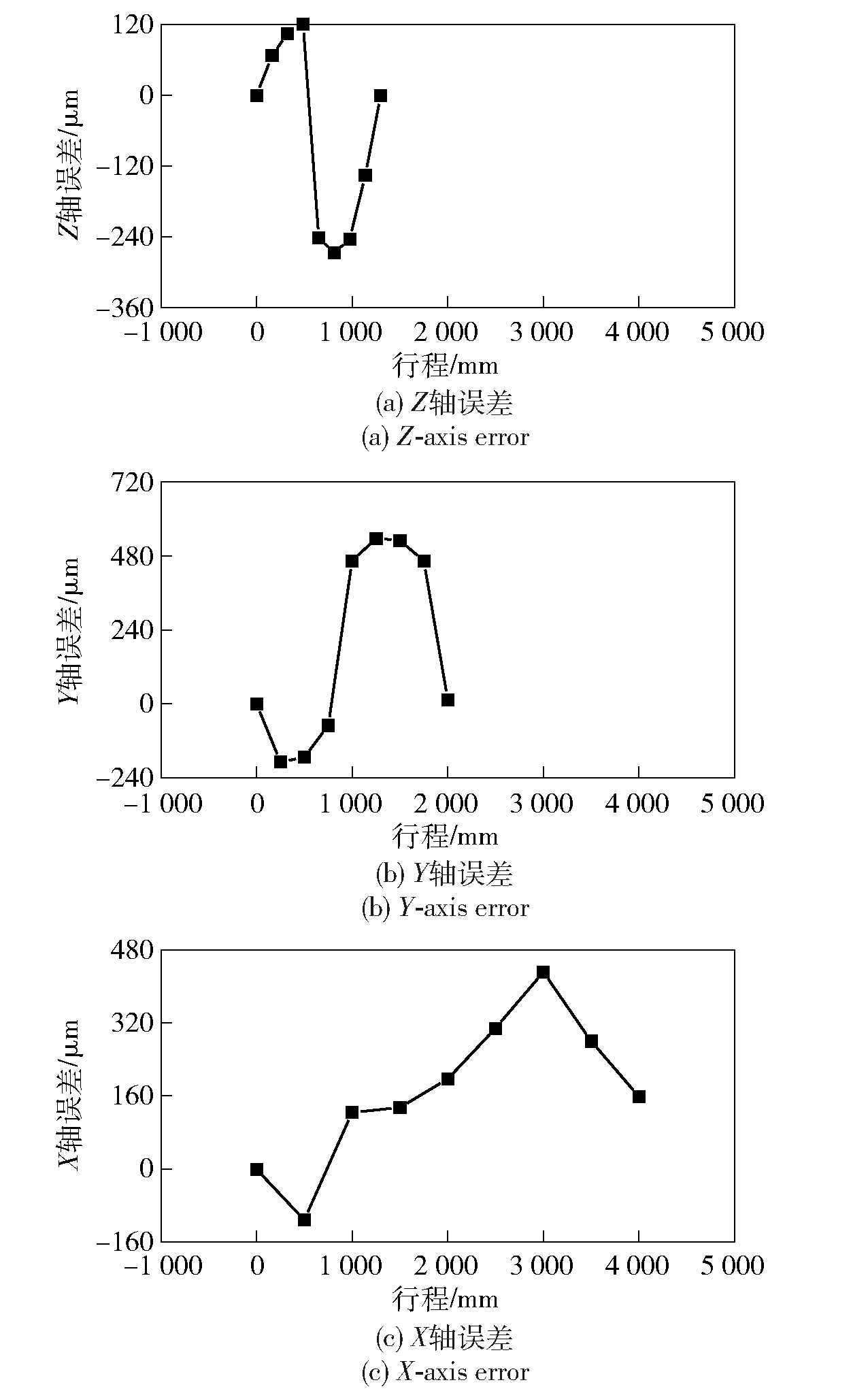
Fig.14 Accuracy of three-axis truss repeat positioning
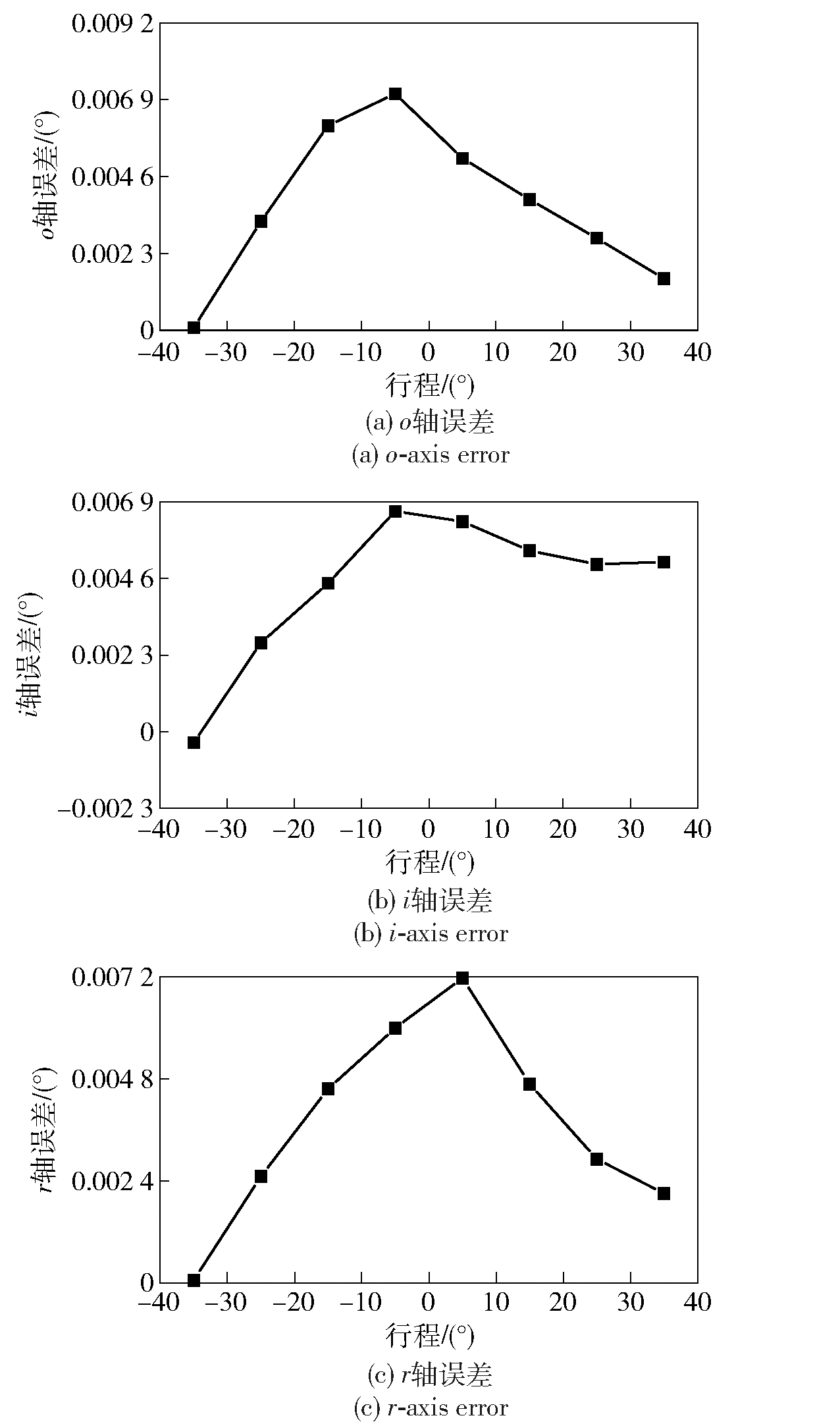
Fig.15 Accuracy of three-axis truss repeat positioning
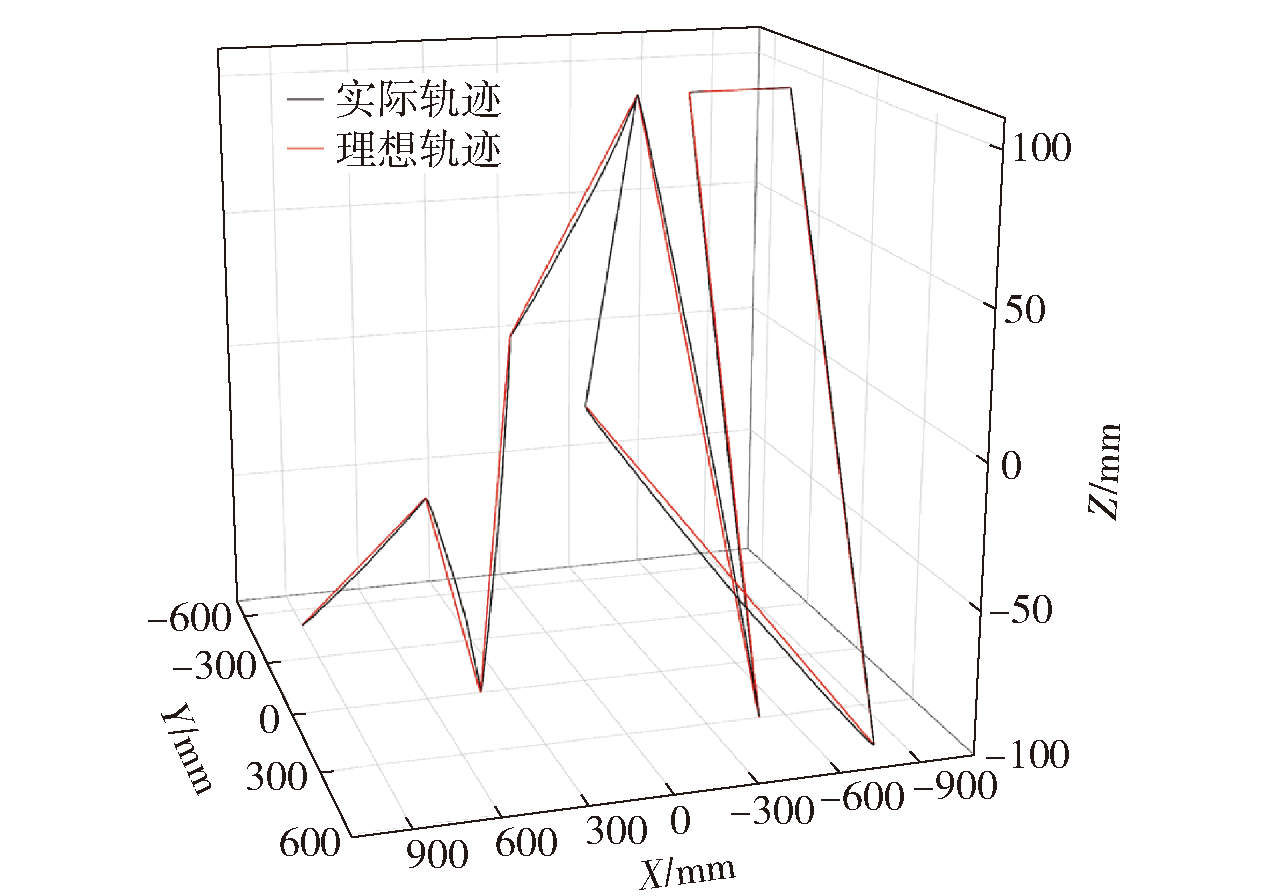
Fig.16 Dynamic trajectory diagram of a three-axis truss
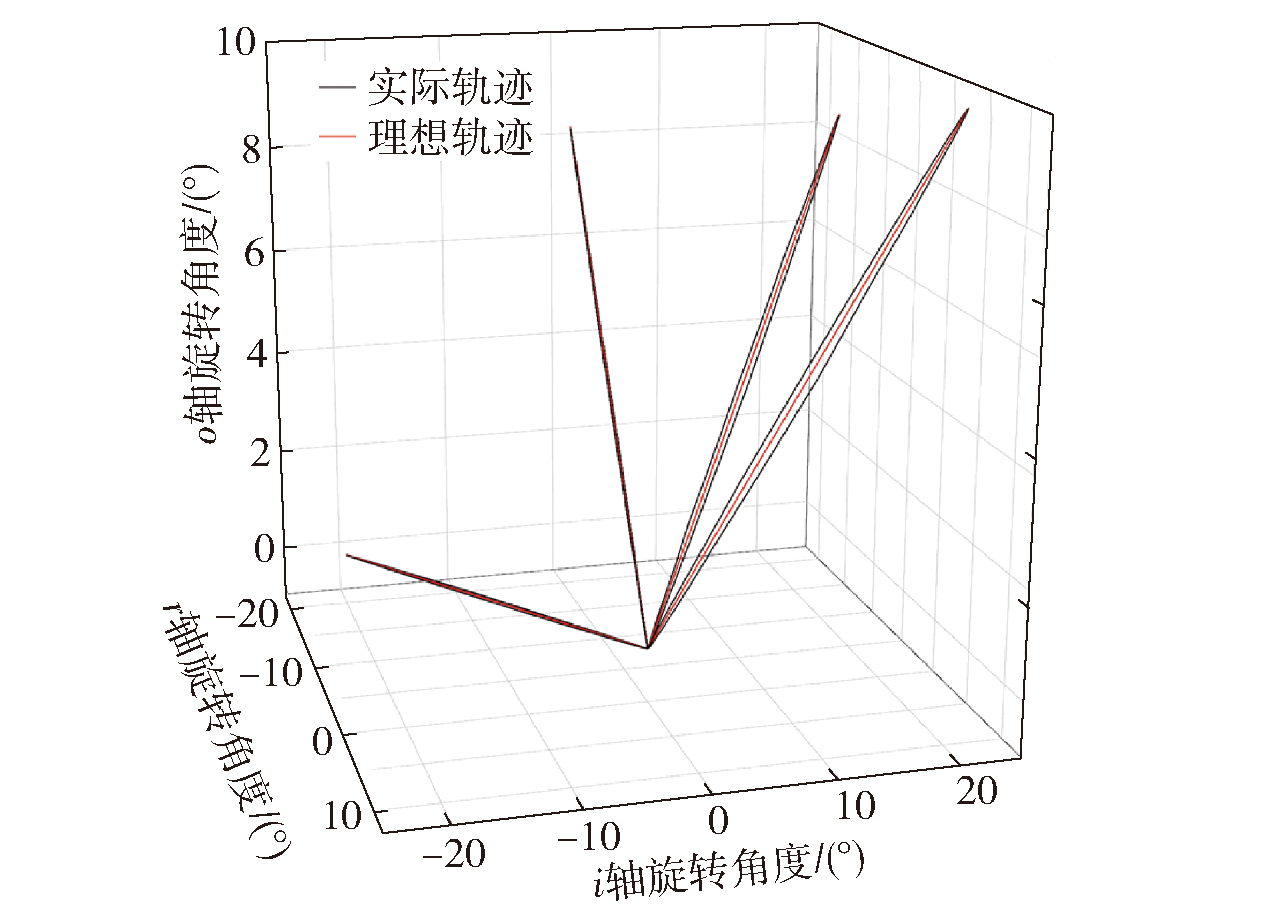
Fig.17 Dynamic angle diagram of the three-axis rotary table
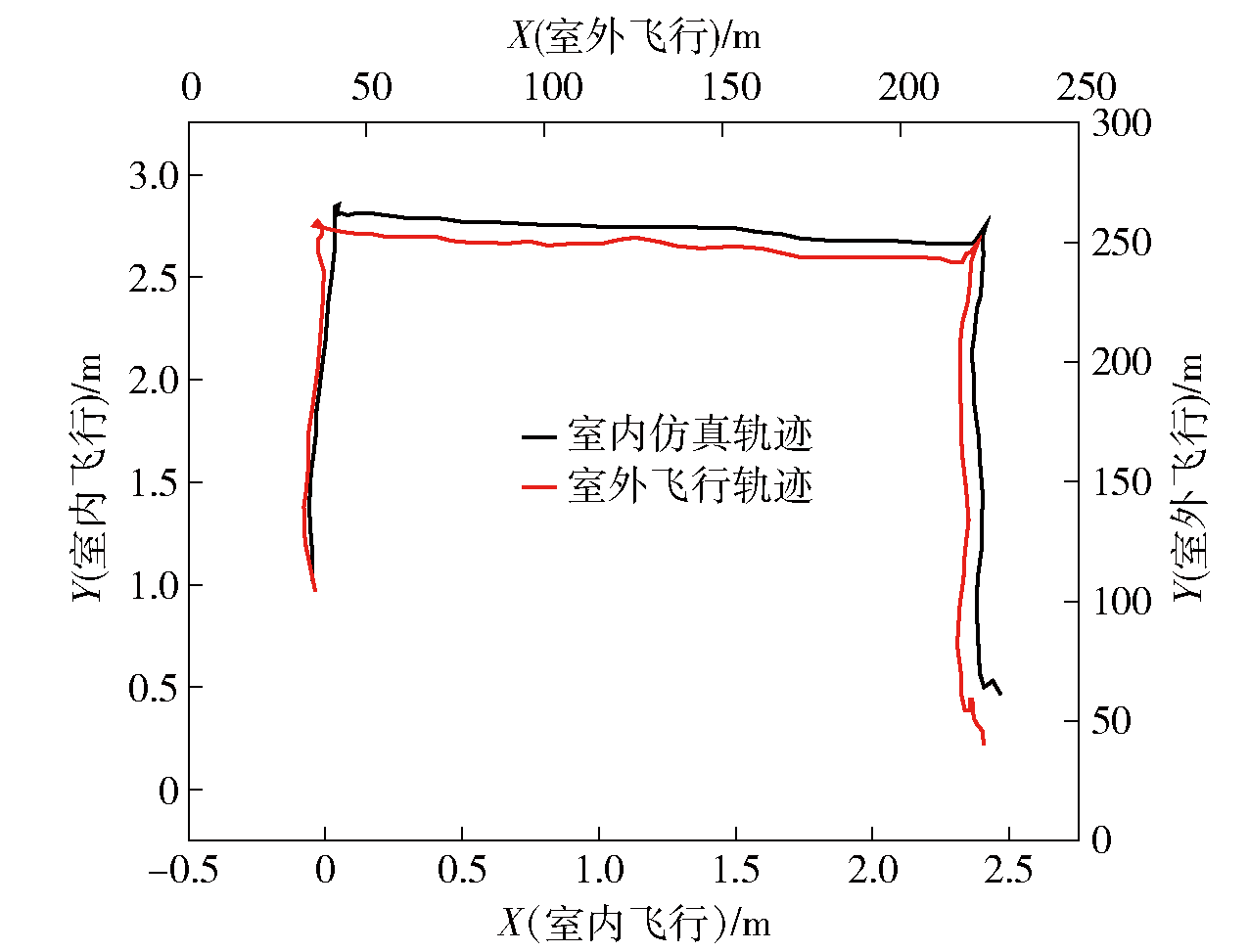
Fig.18 Comparison of simulation effects
| [1] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12):2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [2] |
刘全攀, 王正杰, 王寰. 基于双目视觉-惯性导航的轻型无人机导航算法[J]. 兵工学报, 2020, 41(增刊2):241-248.
|
|
|
|
| [3] |
doi: 10.1109/Access.6287639 URL |
| [4] |
doi: 10.1109/ACCESS.2021.3123348 URL |
| [5] |
doi: 10.1016/j.matpr.2019.03.157 URL |
| [6] |
林传健, 章卫国, 史静平, 等. 无人机跟踪系统仿真平台的设计与实现[J]. 哈尔滨工业大学学报, 2020, 52(10):119-127.
|
|
|
|
| [7] |
孙旺, 刘西, 南英. 基于MFC的Vega Prime航空飞行器动态视景仿真[J]. 指挥控制与仿真, 2019, 41(5):87-94.
doi: 10.3969/j.issn.1673-3819.2019.05.018 |
|
|
|
| [8] |
|
| [9] |
钟林钢, 降晶晶, 叶超宇. 基于Unity3D的无人机集群仿真平台设计[J]. 计算机科学与应用, 2021, 11(9): 2242-2251.
|
|
doi: 10.12677/CSA.2021.119229 URL |
|
| [10] |
李军伟, 袁冬莉. 基于VxWorks的无人机半物理仿真研究[J]. 测控技术, 2008, 27(9):92-94.
|
|
|
|
| [11] |
doi: 10.1016/j.eng.2019.01.014 URL |
| [12] |
doi: 10.1016/j.sysarc.2016.11.012 URL |
| [13] |
黄瑞松, 李海凤, 刘金华, 等. 飞行器半实物仿真技术现状与发展趋势分析[J]. 系统仿真学报, 2019, 31(9): 1763-1774.
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
| [14] |
|
| [15] |
doi: 10.1016/j.actaastro.2018.03.030 URL |
| [16] |
李鹏, 张杰, 徐宏伟, 等. 低成本无人机载空地导弹姿态测量误差研究[J]. 西北工业大学学报, 2022, 40(2): 377-383.
|
|
doi: 10.1051/jnwpu/20224020377 URL |
|
| [17] |
杨宝庆, 马杰, 姚郁. 飞行器半实物仿真装备研究进展与展望[J]. 宇航学报, 2020, 41(6):657-665.
|
|
|
|
| [18] |
王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6):1283-1289.
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.019 |
|
| [19] |
黄志坚. 电气伺服控制技术及应用[M]. 北京: 中国电力出版社, 2016.
|
|
|
|
| [20] |
曾庆双, 王茂, 刘升才. 三轴转台框架间动力学耦合及解耦研究[J]. 中国惯性技术学报, 1997(3):44-49.
|
|
|
| [1] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [2] | GUAN Zhen-yu,LI Jie, YANG Huan, XU Bei-bei, LIU Chang. Research on Attitude Estimation of Micro UAV Based on Sparse Line Optical Flow Field [J]. Acta Armamentarii, 2014, 35(11): 1851-1859. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||