
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2661-2671.doi: 10.12382/bgxb.2022.1181
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
GONG Yuanqiang1, ZHANG Yepeng1, MA Wanpeng2, XUE Xiao1,*( )
)
Received:2022-11-30
Online:2023-07-26
Contact:
XUE Xiao
CLC Number:
GONG Yuanqiang, ZHANG Yepeng, MA Wanpeng, XUE Xiao. Mechanisms of Group Intelligence Emergence in UAV Swarms[J]. Acta Armamentarii, 2023, 44(9): 2661-2671.
Add to citation manager EndNote|Ris|BibTeX
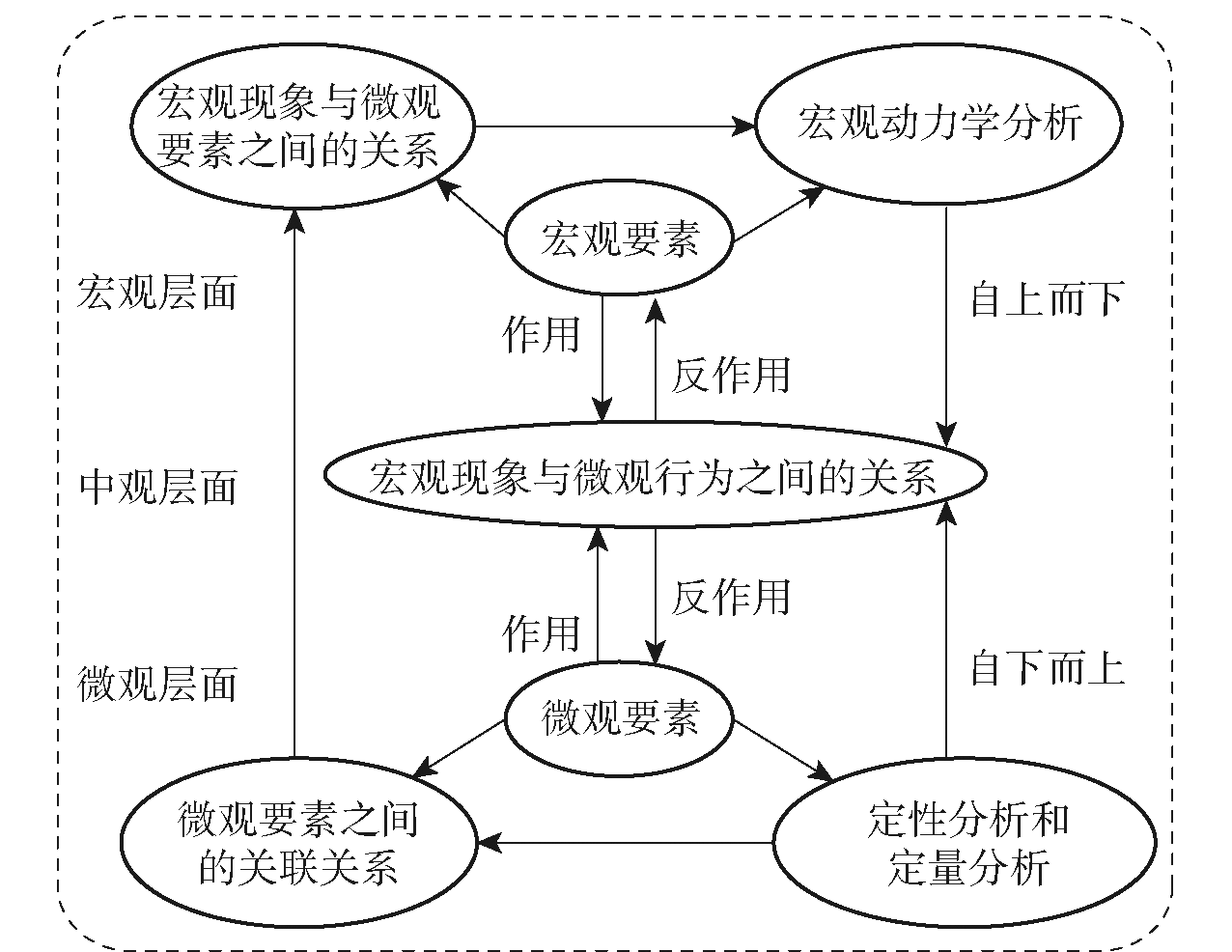
Fig.1 Analysis framework of emergence in complex systems
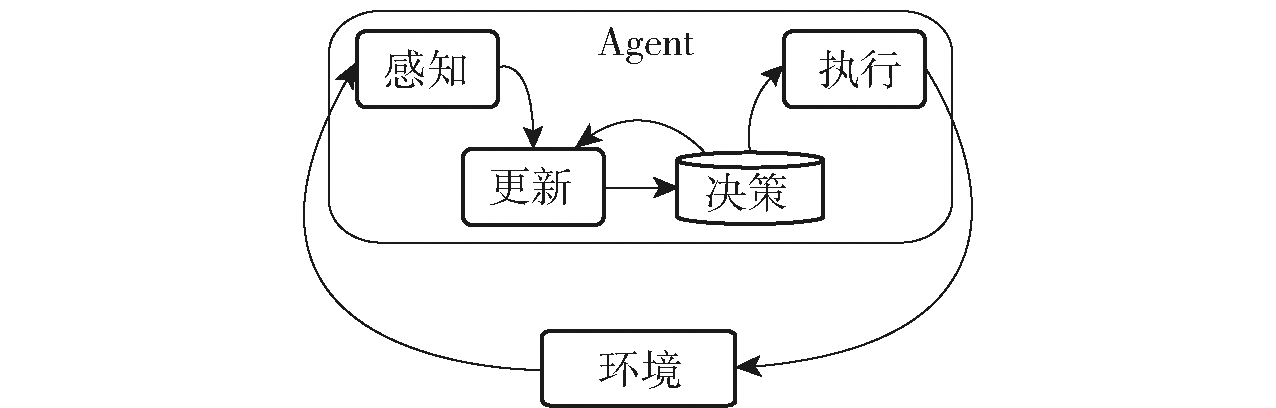
Fig.2 Agent's behavior process at micro level
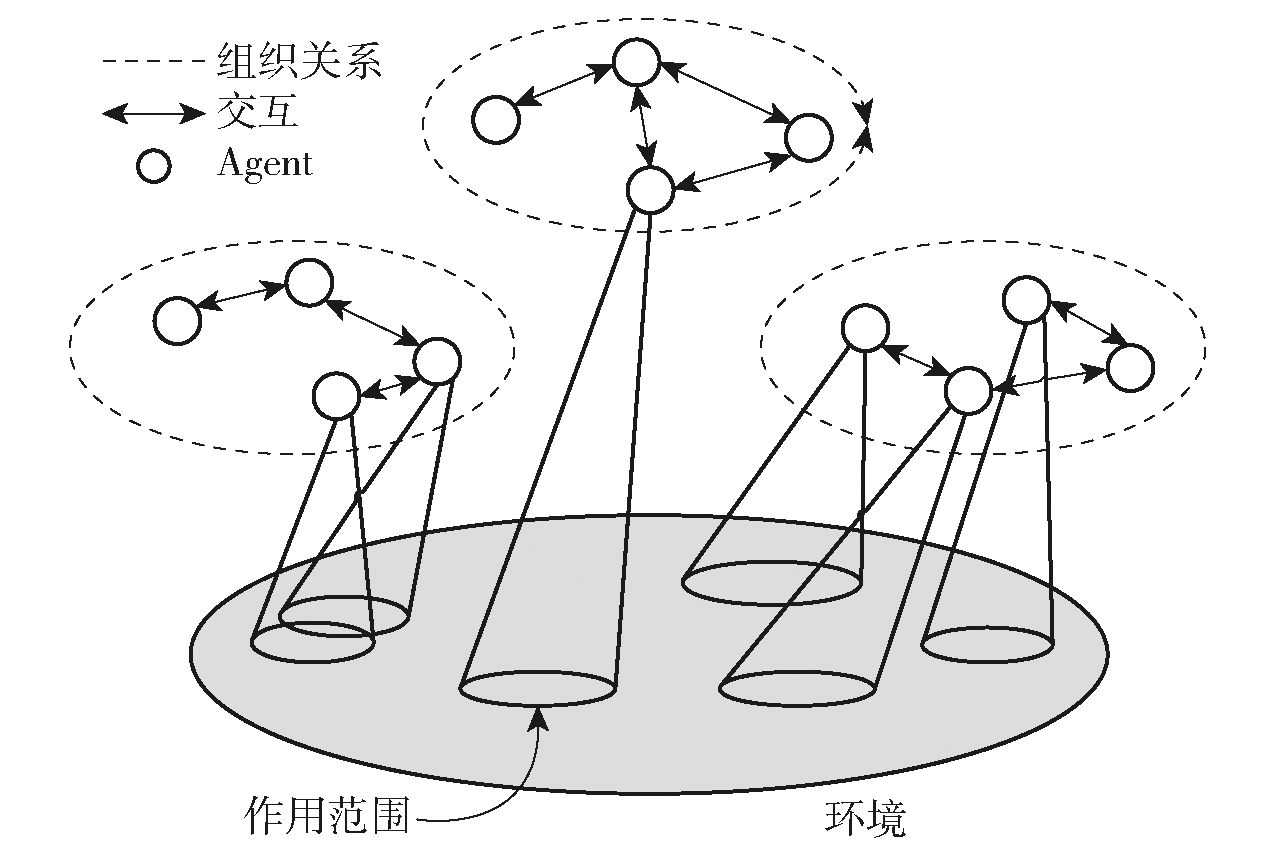
Fig.3 Organizational structure of multi-agent systems
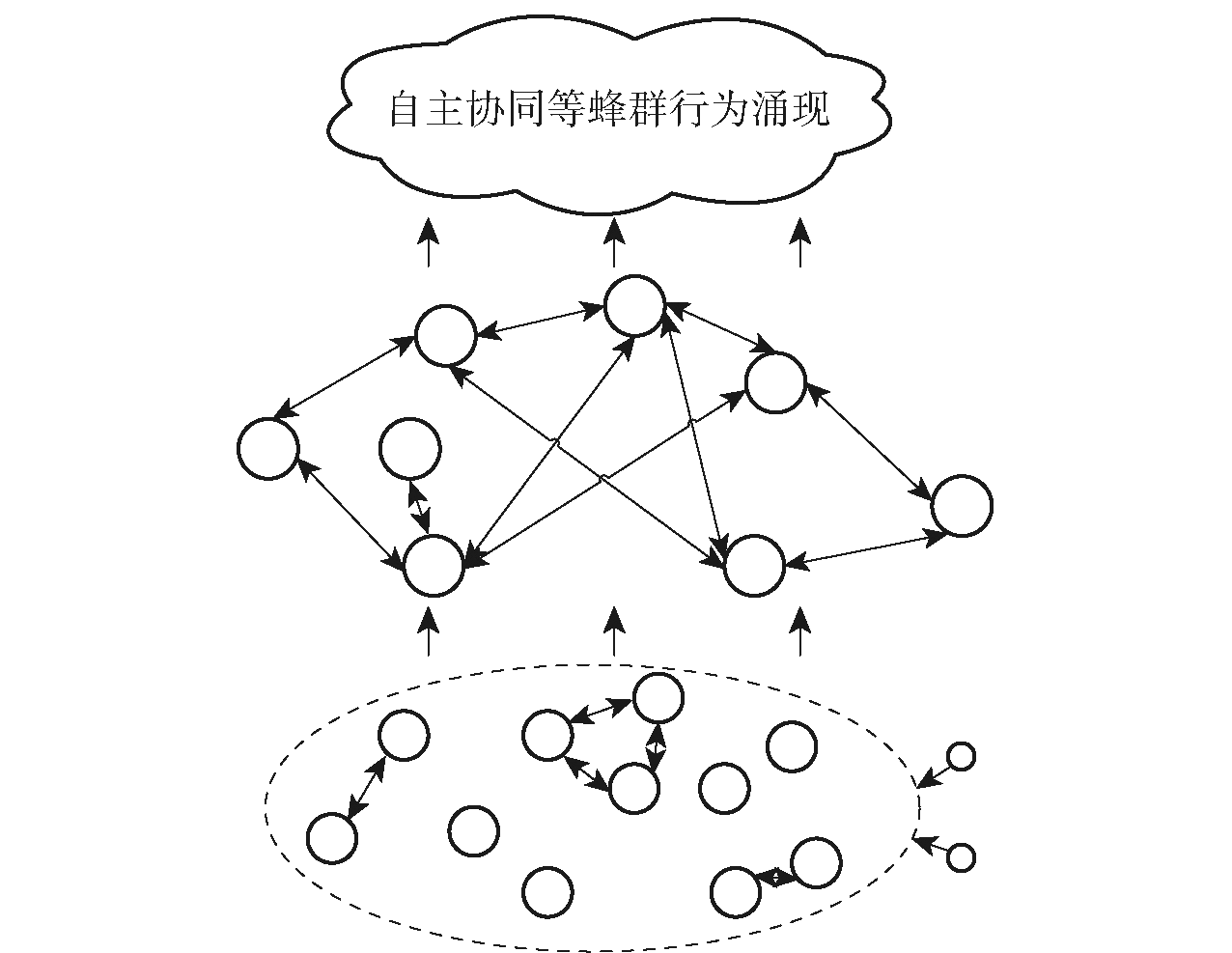
Fig.4 Emergence process of swarm behaviors at macro level
| 公共物品演化博弈 | 无人机蜂群自主协同机制 |
|---|---|
| 空间结构种群 | 无人机蜂群 |
| 公共物品 | 作战资源(弹药、通信等) |
| 个体 | 无人机个体 |
| 合作策略(Collaboration, C) | 无人机选择向蜂群贡献资源 |
| 非合作策略(Defection, D) | 无人机拒绝向蜂群贡献资源 |
| 收益 | 无人机的作战效益 |
| 演化 | 多轮博弈中,无人机策略动态变化, 蜂群策略分布也在动态变化 |
| 博弈 | 无人机之间进行通信并根据收益 进行策略选择 |
Table 1 Conceptual mapping between UAV swarm collaboration and public goods game
| 公共物品演化博弈 | 无人机蜂群自主协同机制 |
|---|---|
| 空间结构种群 | 无人机蜂群 |
| 公共物品 | 作战资源(弹药、通信等) |
| 个体 | 无人机个体 |
| 合作策略(Collaboration, C) | 无人机选择向蜂群贡献资源 |
| 非合作策略(Defection, D) | 无人机拒绝向蜂群贡献资源 |
| 收益 | 无人机的作战效益 |
| 演化 | 多轮博弈中,无人机策略动态变化, 蜂群策略分布也在动态变化 |
| 博弈 | 无人机之间进行通信并根据收益 进行策略选择 |
| 属性 | 属性描述 | 现实映射 |
|---|---|---|
| T | Agent的类型 | 无人机蜂群由多个子群组成 |
| R | Agent具有的资源 | 无人机携带的作战资源 |
| k | Agent的节点度 | 无人机通过链路进行通信 |
| r | 协作因子 | 无人机合作会产生规模效益 |
| s | Agent的策略 | 无人机可以选择合作/非合作策略 |
| c | 选择合作策略的代价 | 无人机需要贡献自身资源 |
| f | 收益 | 无人机获得任务反馈情况 |
| ω | 选择强度 | 无人机更新策略的活跃度 |
| α | 期望水平 | 无人机对于自身收益的预设期望 |
Table 2 Attributes of a UAV agent
| 属性 | 属性描述 | 现实映射 |
|---|---|---|
| T | Agent的类型 | 无人机蜂群由多个子群组成 |
| R | Agent具有的资源 | 无人机携带的作战资源 |
| k | Agent的节点度 | 无人机通过链路进行通信 |
| r | 协作因子 | 无人机合作会产生规模效益 |
| s | Agent的策略 | 无人机可以选择合作/非合作策略 |
| c | 选择合作策略的代价 | 无人机需要贡献自身资源 |
| f | 收益 | 无人机获得任务反馈情况 |
| ω | 选择强度 | 无人机更新策略的活跃度 |
| α | 期望水平 | 无人机对于自身收益的预设期望 |
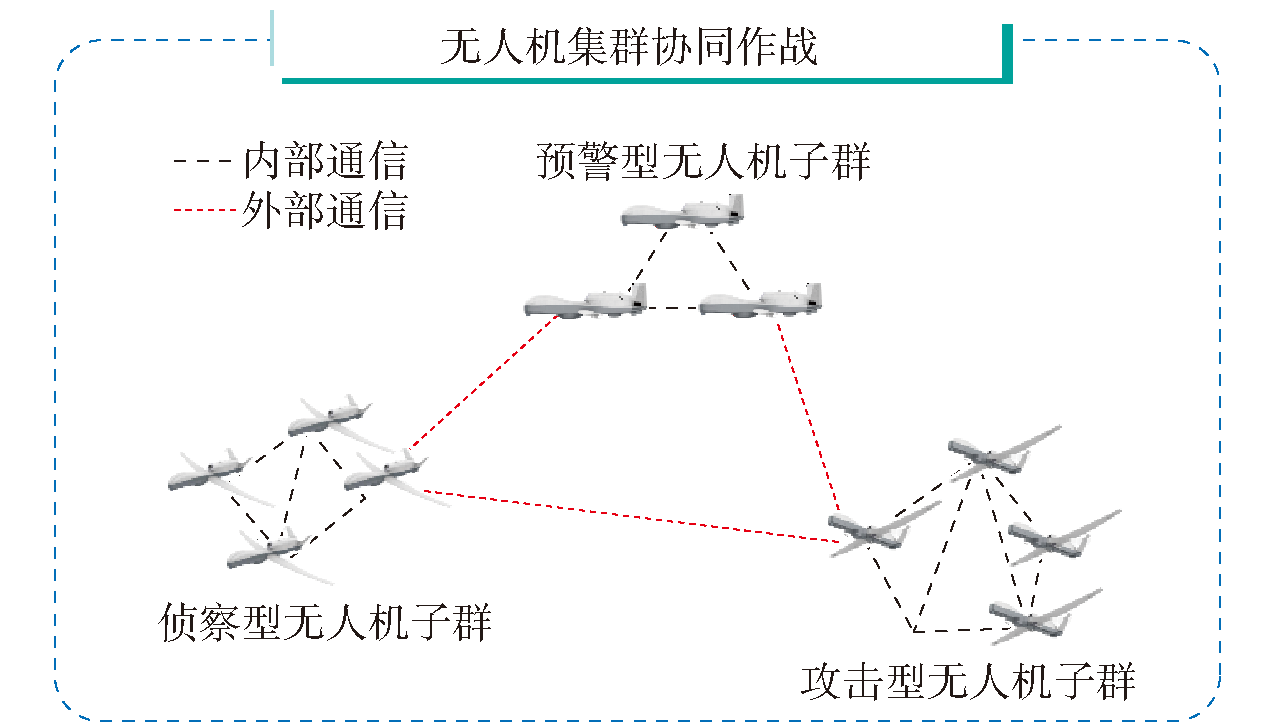
Fig.5 UAV swarm communication network

Fig.6 Communication network topology for cooperative UAV swarm operations
| 无人机属性 | 属性设置 |
|---|---|
| 蜂群规模 | 无人机蜂群的初始数量N=100 |
| 无人机种类 | 不同功能的无人机种群数量M=5,新生成的 无人机随机加入一个无人机子群 |
| 无人机初始策略 | 随机选择合作策略C或非合作策略D |
| 作战成本 | 无人机在每次博弈中选择合作策略的 行为成本c=1 |
| 选择强度 | 为了不失一般性,本文设定选择强度ω=1 |
| 节点平均度 | 节点内连接m=2,外连接n=1,平均度 ≈4 |
| 协作因子 | r=10 |
| 无人机蜂群规模 | 无人机蜂群的初始数量N=100 |
Table 3 Experimental parameter setting
| 无人机属性 | 属性设置 |
|---|---|
| 蜂群规模 | 无人机蜂群的初始数量N=100 |
| 无人机种类 | 不同功能的无人机种群数量M=5,新生成的 无人机随机加入一个无人机子群 |
| 无人机初始策略 | 随机选择合作策略C或非合作策略D |
| 作战成本 | 无人机在每次博弈中选择合作策略的 行为成本c=1 |
| 选择强度 | 为了不失一般性,本文设定选择强度ω=1 |
| 节点平均度 | 节点内连接m=2,外连接n=1,平均度 ≈4 |
| 协作因子 | r=10 |
| 无人机蜂群规模 | 无人机蜂群的初始数量N=100 |
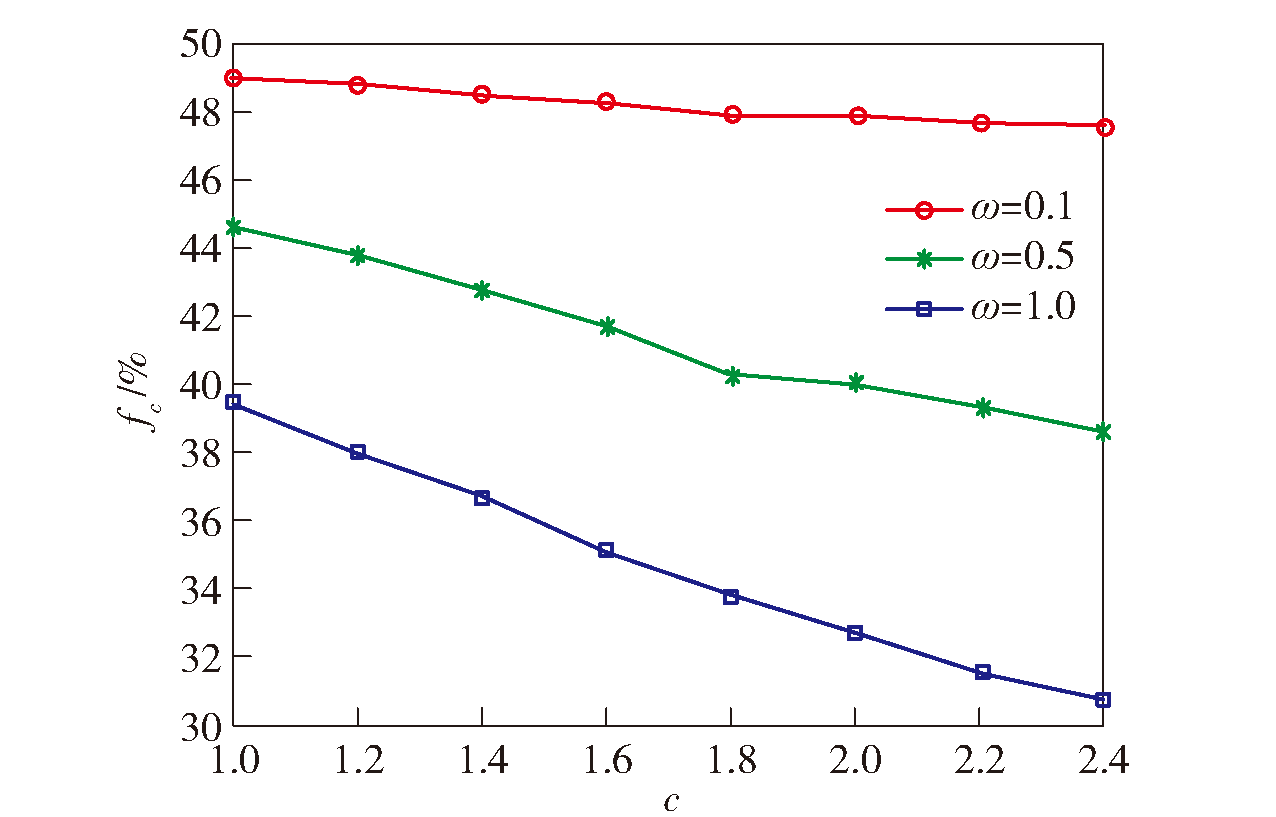
Fig.7 Relationship curve between the level of swarm cooperation and the operational cost
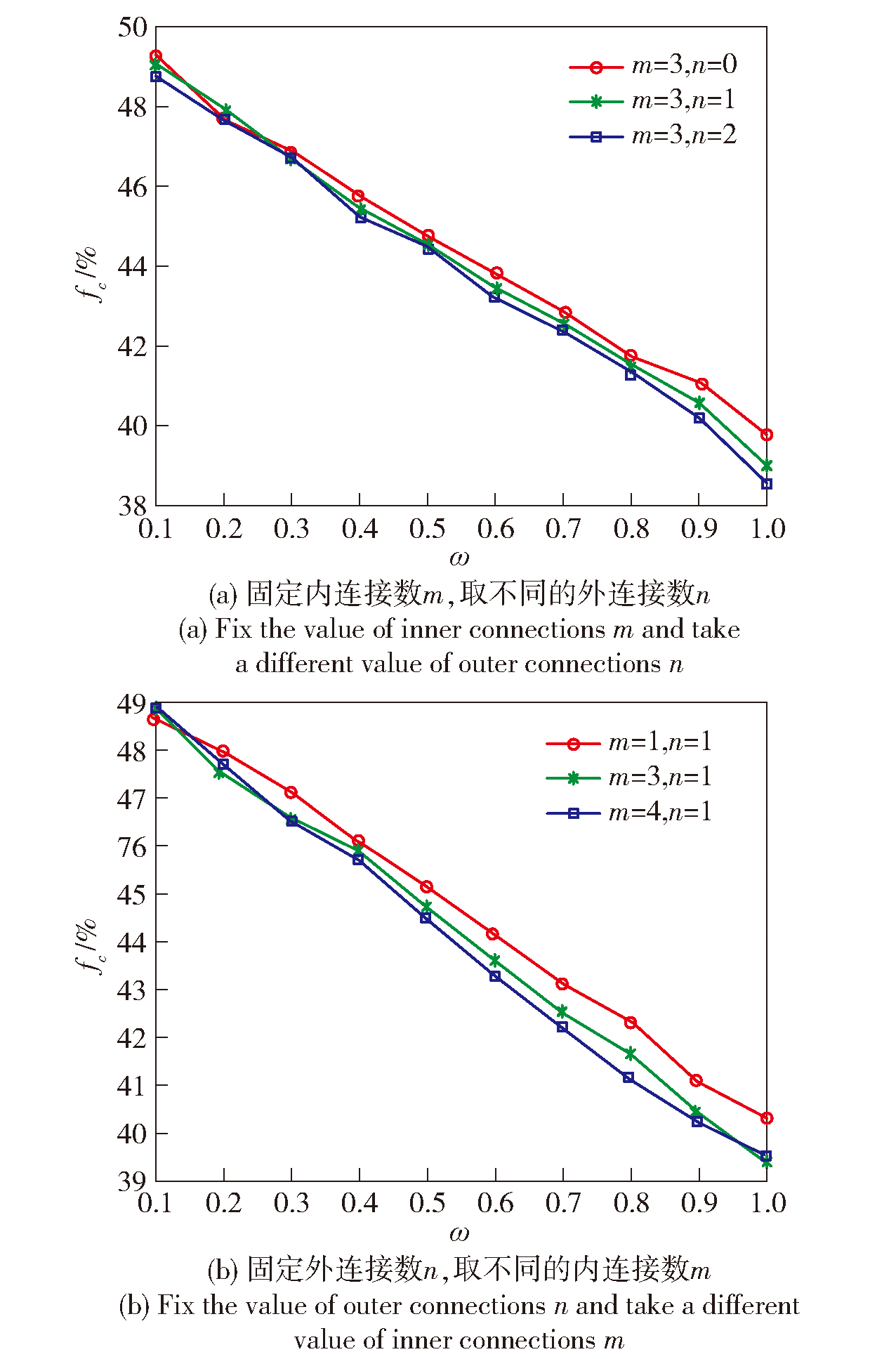
Fig.8 The impact of the relative relationship between the value of internal connections and the value of external connections on the level of cooperation
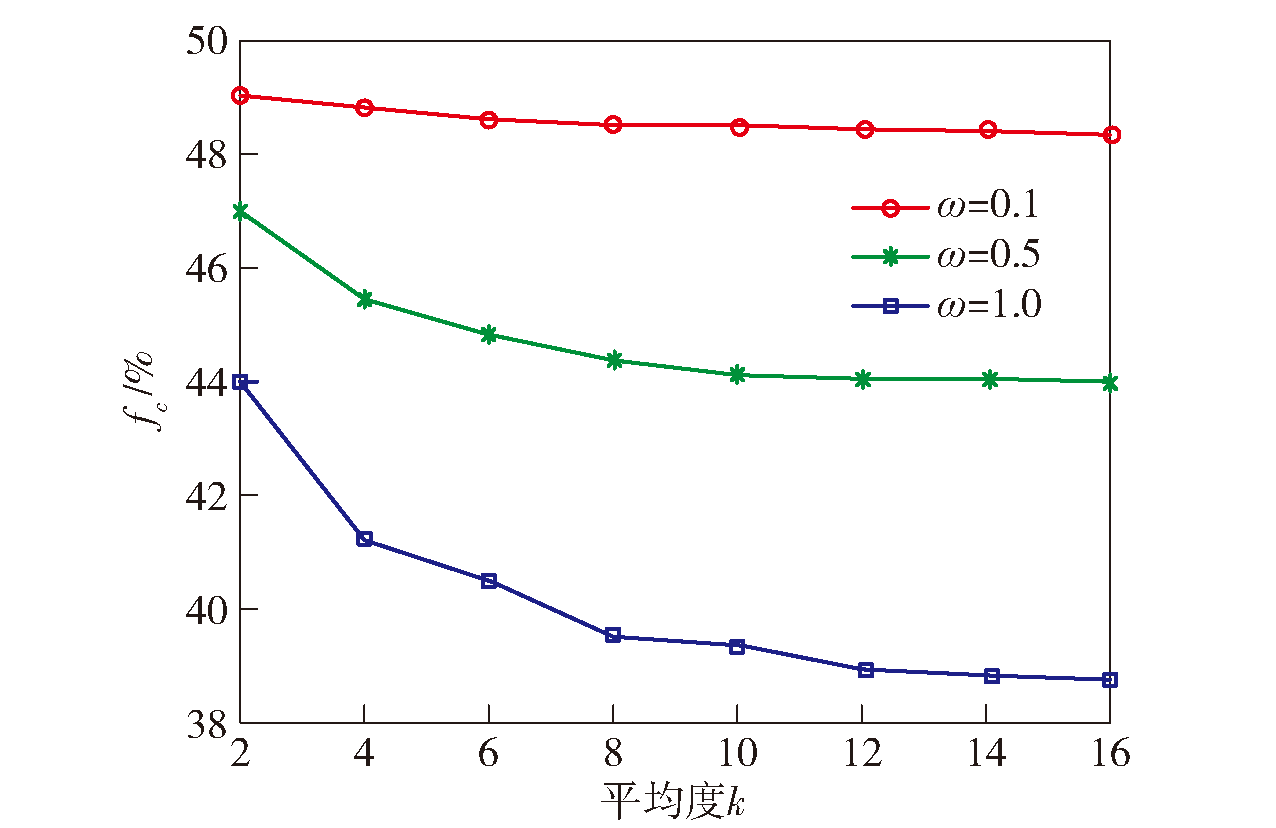
Fig.9 Relationship curve between the level of colony cooperation and the average degree of network
| [1] |
|
| [2] |
|
| [3] |
doi: 10.1016/j.amc.2009.03.090 URL |
| [4] |
doi: 10.1016/j.chemolab.2015.08.020 URL |
| [5] |
|
| [6] |
梁晓龙, 张佳强, 吕娜. 无人机集群[M]. 西安: 西北工业大学出版社, 2018:1-6.
|
|
|
|
| [7] |
王华, 赵东杰, 杨海涛, 等. 大数据时代下网络群体智能研究方法[J]. 计算机与现代化, 2015(2): 1-6.
|
|
|
|
| [8] |
|
| [9] |
郭斌. 论智能物联与未来制造——拥抱人机物融合群智计算时代[J]. 人民论坛学术前沿, 2020(13): 32-42. DOI: 10. 16619/j. cnki.rmltxsqy. 2020. 13. 004.
|
|
|
|
| [10] |
赵健, 张鑫褆, 李佳明, 等. 群体智能2.0研究综述[J]. 计算机工程, 2019, 45(12): 1-7.
doi: 10.19678/j.issn.1000-3428.0056410 |
|
doi: 10.19678/j.issn.1000-3428.0056410 |
|
| [11] |
|
| [12] |
张婷婷, 宋爱国, 蓝羽石. 集群无人系统自适应结构建模与预测[J]. 中国科学:信息科学, 2020, 50(3):16-19.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
doi: 10.1109/TII.2022.3173053 URL |
| [16] |
doi: 10.1109/TII.9424 URL |
| [17] |
|
| [18] |
doi: 10.1109/TCSS.2021.3125287 URL |
| [19] |
doi: 10.1109/TCSS.2021.3121323 URL |
| [20] |
薛霄, 于湘凝, 周德雨, 等. 计算实验方法的溯源、现状与展望[J]. 自动化学报, 2023, 49(2):246-271.
|
|
|
|
| [21] |
doi: 10.26599/IJCS.2022.9100026 URL |
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
TAN JONATHAN H W,
doi: 10.1016/j.econlet.2006.12.031 URL |
| [26] |
王龙. 多智能体协调控制的演化博弈方法[J]. 系统科学与数学, 2016, 36(3):302-318.
doi: 10.12341/jssms12735 |
|
|
|
| [27] |
doi: 10.1103/PhysRevE.58.69 URL |
| [28] |
doi: 10.1109/TSMC.6221021 URL |
| [29] |
|
| [30] |
纪广, 郝建国, 张振伟. 面向无人机作战的虚拟孪生系统设计方案[J]. 兵工学报, 2022, 43(8): 1902-1912.
|
|
doi: 10.12382/bgxb.2021.0408 |
| [1] | LIU Xingyu, GUO Ronghua, REN Chengcai, YAN Chao, CHANG Yuan, ZHOU Han, XIANG Xiaojia. Distributed Target Assignment Method for UAV Swarms Using Identity Hungarian Algorithm [J]. Acta Armamentarii, 2023, 44(9): 2824-2835. |
| [2] | ZHANG Qi, GE Yuxue, LI Pan, KANG Qijun, PEI Yang. Evaluation Method for SoS Contribution Rate of All-optical UAV Swarm Based on ABMS [J]. Acta Armamentarii, 2023, 44(11): 3422-3435. |
| [3] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [4] | BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game [J]. Acta Armamentarii, 2023, 44(11): 3407-3421. |
| [5] | SHEN Yuting, MENG Xin, GAO Yueqing. Hierarchical Information Dissemination Method for Unmanned Cluster Targets Allocation [J]. Acta Armamentarii, 2023, 44(10): 3006-3025. |
| [6] | XU Yu-guo, QIU Jing, LIU Guan-jun. Optimization Design on Cooperation Effectiveness of Equipment Maintenance Support Network Based on Complex Network [J]. Acta Armamentarii, 2012, 33(2): 244-251. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||