
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (9): 2824-2835.doi: 10.12382/bgxb.2022.0994
Special Issue: 智能系统与装备技术
Previous Articles Next Articles
LIU Xingyu1, GUO Ronghua1, REN Chengcai1,*( ), YAN Chao2, CHANG Yuan3, ZHOU Han2, XIANG Xiaojia2
), YAN Chao2, CHANG Yuan3, ZHOU Han2, XIANG Xiaojia2
Received:2022-10-29
Online:2023-03-06
Contact:
REN Chengcai
CLC Number:
LIU Xingyu, GUO Ronghua, REN Chengcai, YAN Chao, CHANG Yuan, ZHOU Han, XIANG Xiaojia. Distributed Target Assignment Method for UAV Swarms Using Identity Hungarian Algorithm[J]. Acta Armamentarii, 2023, 44(9): 2824-2835.
Add to citation manager EndNote|Ris|BibTeX
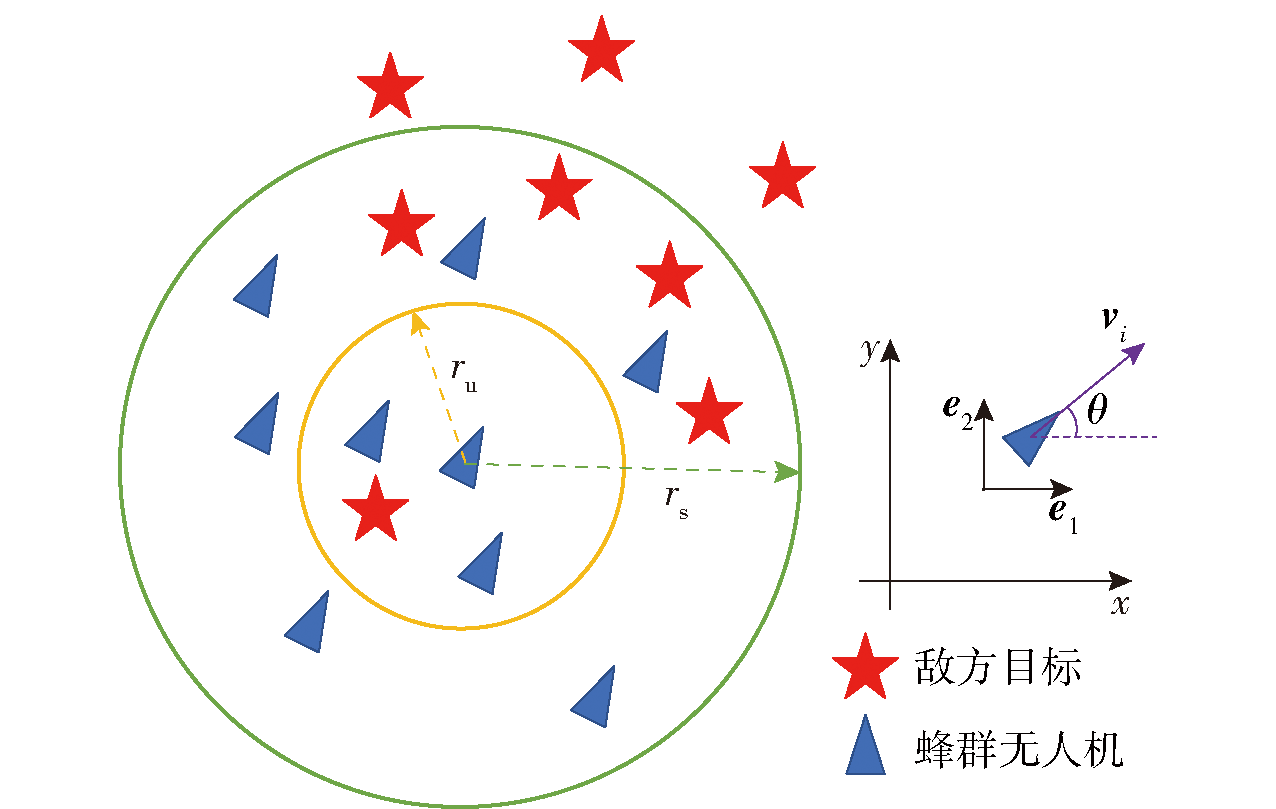
Fig.1 Concept of drone swarm combat
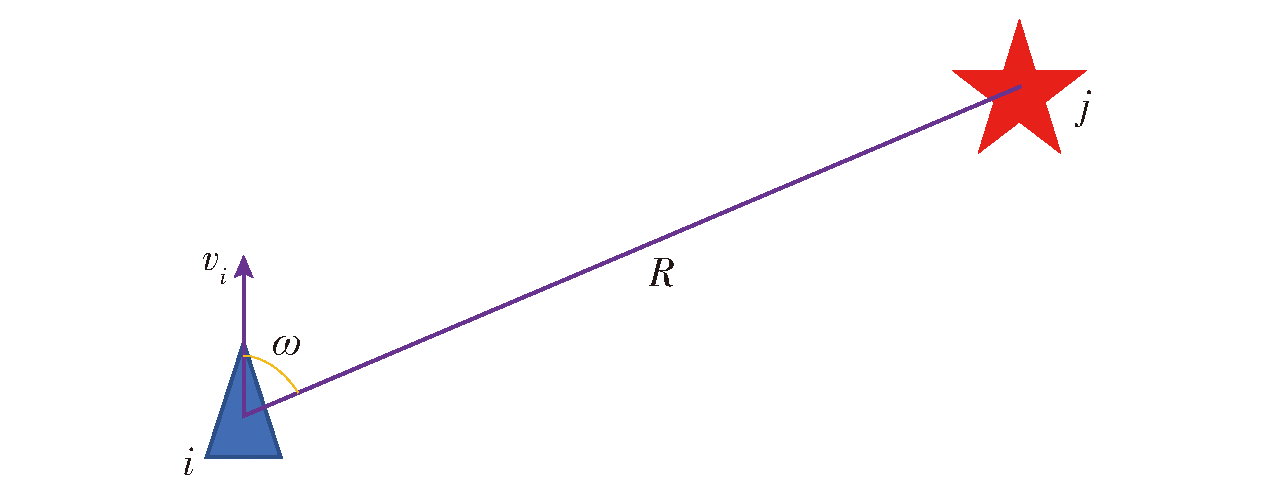
Fig.2 Schematic diagram of swarm drone strike situation
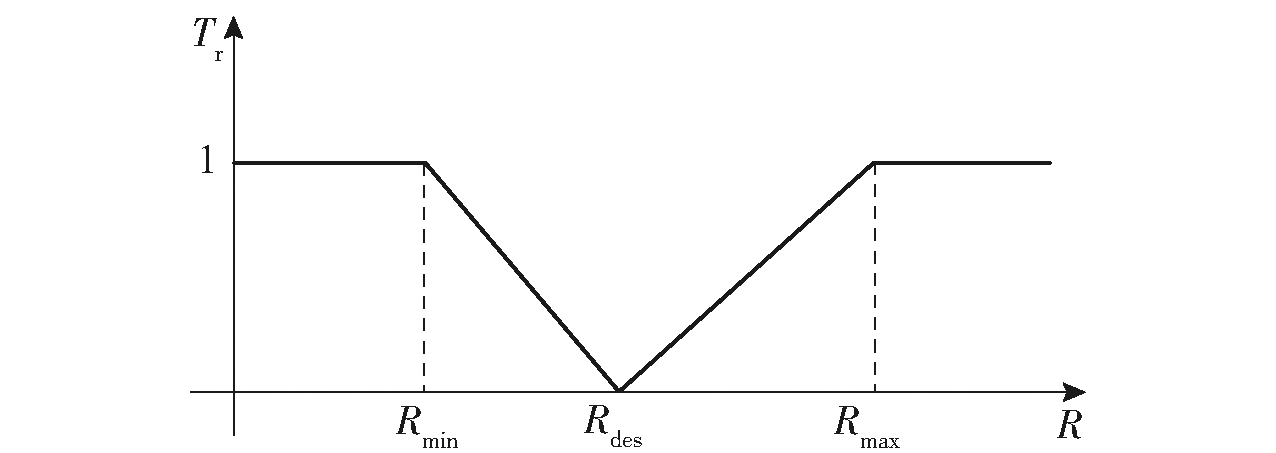
Fig.3 Distance advantage function
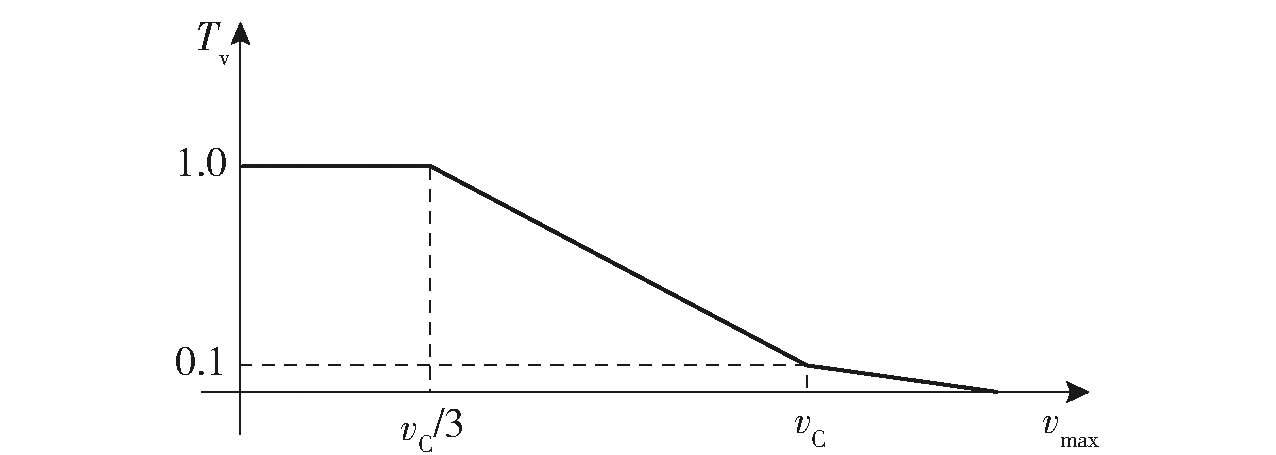
Fig.4 Speed advantage function
| 序号 | 内容 |
|---|---|
| 1 | 使效率矩阵变换,在各行各列中均出现0元素 |
| 2 | 进行试指派,寻求最优解 |
| 3 | 作最少直线覆盖所有0元素,确定效率矩阵中能找到的最多独立元素 |
| 4 | 使效率矩阵变换,增加0元素 |
| 5 | 获得N个独立0元素,即最优解 |
Table 1 Steps of Hungarian algorithm
| 序号 | 内容 |
|---|---|
| 1 | 使效率矩阵变换,在各行各列中均出现0元素 |
| 2 | 进行试指派,寻求最优解 |
| 3 | 作最少直线覆盖所有0元素,确定效率矩阵中能找到的最多独立元素 |
| 4 | 使效率矩阵变换,增加0元素 |
| 5 | 获得N个独立0元素,即最优解 |
Fig.5 Unified efficiency matrix
Fig.6 Unified efficiency matrix based on local information
Fig.7 Unified efficiency matrix in identity Hungarian algorithm
Fig.8 Process flow of multi-target assignment method for UAV swarm using identity-based Hungarian algorithm
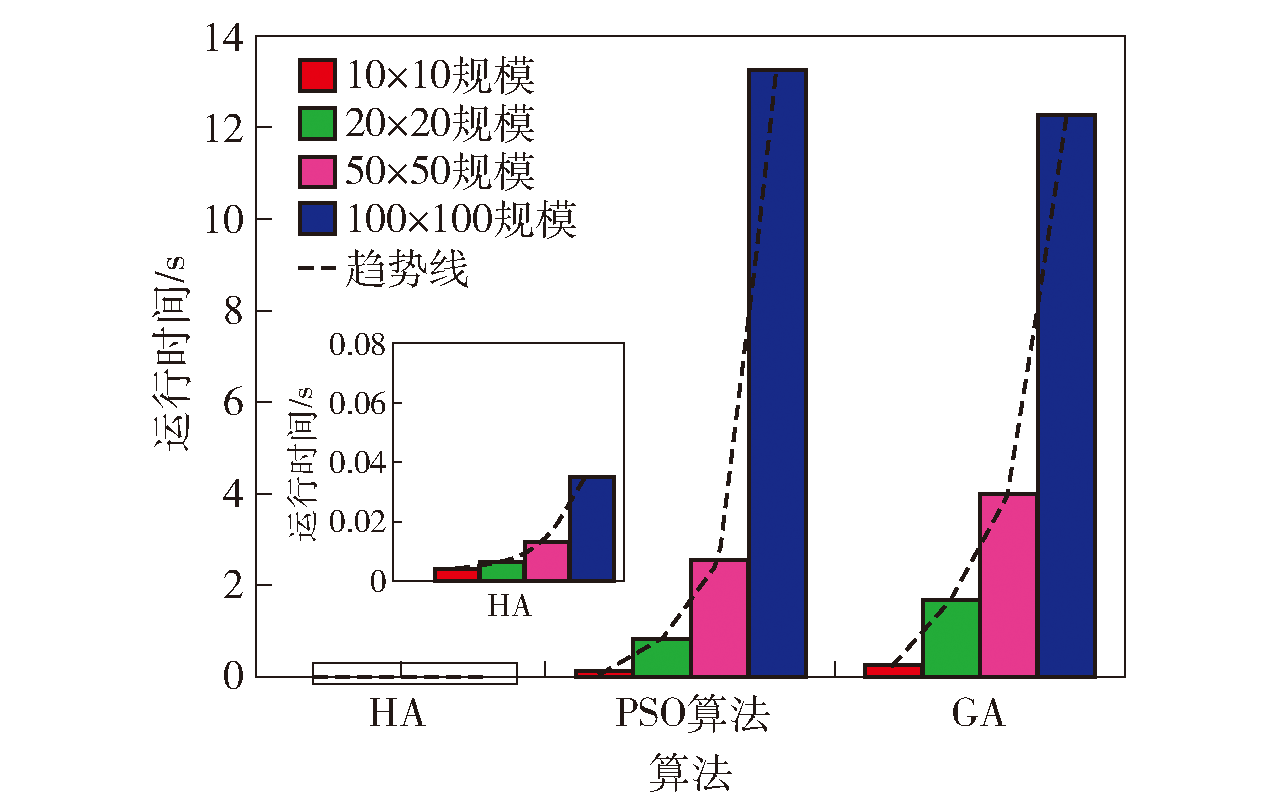
Fig.9 Comparison of runtimes of HA, PSO, and GA[23]
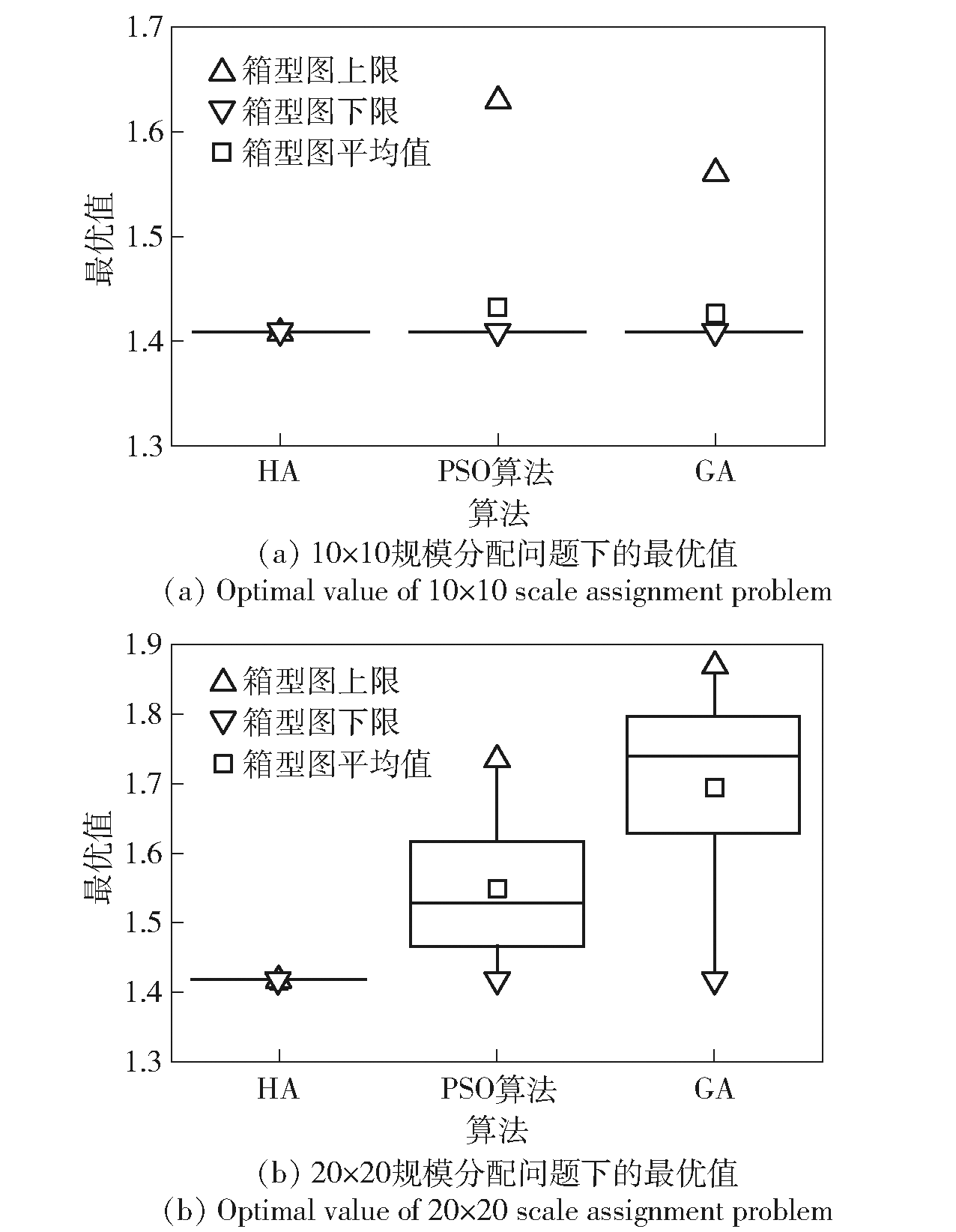
Fig.10 Comparison of optimal values of HA, PSO, and GA[23]
| 参数 | 对象 | |||||
|---|---|---|---|---|---|---|
| Γ1 | Γ2 | Γ3 | T1 | T2 | T3 | |
| 横坐标/km | 0.098 | 1.547 | 0.971 | 6.916 | 7.960 | 4.036 |
| 纵坐标/km | 1.279 | 2.958 | 1.957 | 4.792 | 3.656 | 5.850 |
| 角度/rad | 0.132 | 0.465 | 1.245 | |||
| 速度/(km·h-1) | 46.210 | 49.574 | 42.147 | |||
| 种类 | 1 | 2 | 3 | |||
Table 2 UAV and enemy target information
| 参数 | 对象 | |||||
|---|---|---|---|---|---|---|
| Γ1 | Γ2 | Γ3 | T1 | T2 | T3 | |
| 横坐标/km | 0.098 | 1.547 | 0.971 | 6.916 | 7.960 | 4.036 |
| 纵坐标/km | 1.279 | 2.958 | 1.957 | 4.792 | 3.656 | 5.850 |
| 角度/rad | 0.132 | 0.465 | 1.245 | |||
| 速度/(km·h-1) | 46.210 | 49.574 | 42.147 | |||
| 种类 | 1 | 2 | 3 | |||
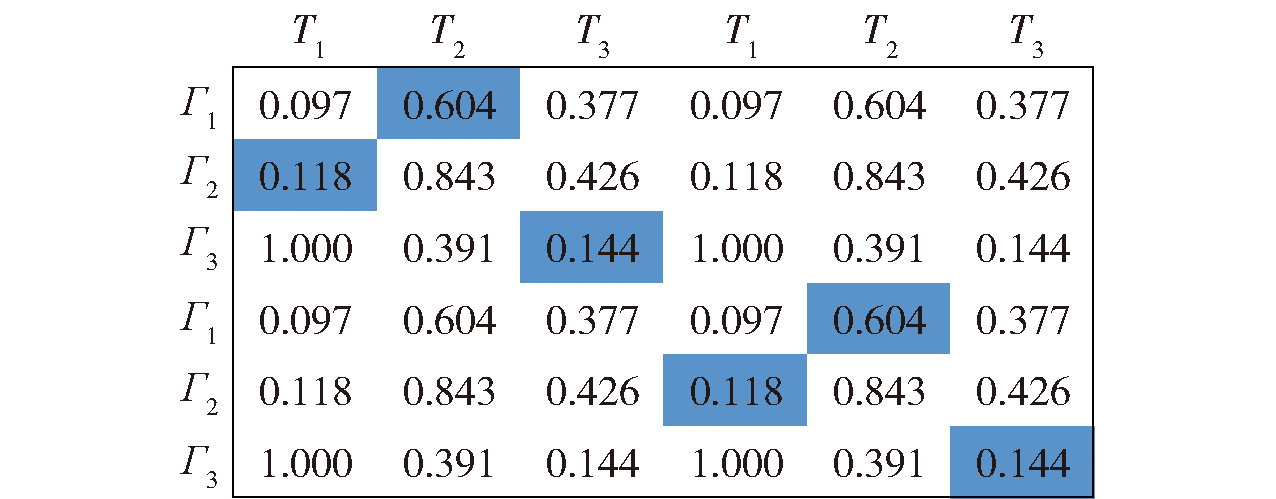
Fig.11 UAV unified efficiency matrix with globally known information
| 参数 | 对象 | |||||
|---|---|---|---|---|---|---|
| Γ1 | Γ2 | Γ3 | T1 | T2 | T3 | |
| 横坐标/km | 0 | 5.606 | 3.117 | -0.722 | -3.907 | 4.134 |
| 纵坐标/km | 4.838 | 4.716 | 9.816 | -3.027 | 2.699 | 6.363 |
| 角度/rad | 2.999 | 0.682 | 0.484 | |||
| 速度/(km·h-1) | 30.019 | 42.497 | 33.860 | |||
| 种类 | 1 | 3 | 2 | |||
Table 3 UAV and enemy target information
| 参数 | 对象 | |||||
|---|---|---|---|---|---|---|
| Γ1 | Γ2 | Γ3 | T1 | T2 | T3 | |
| 横坐标/km | 0 | 5.606 | 3.117 | -0.722 | -3.907 | 4.134 |
| 纵坐标/km | 4.838 | 4.716 | 9.816 | -3.027 | 2.699 | 6.363 |
| 角度/rad | 2.999 | 0.682 | 0.484 | |||
| 速度/(km·h-1) | 30.019 | 42.497 | 33.860 | |||
| 种类 | 1 | 3 | 2 | |||
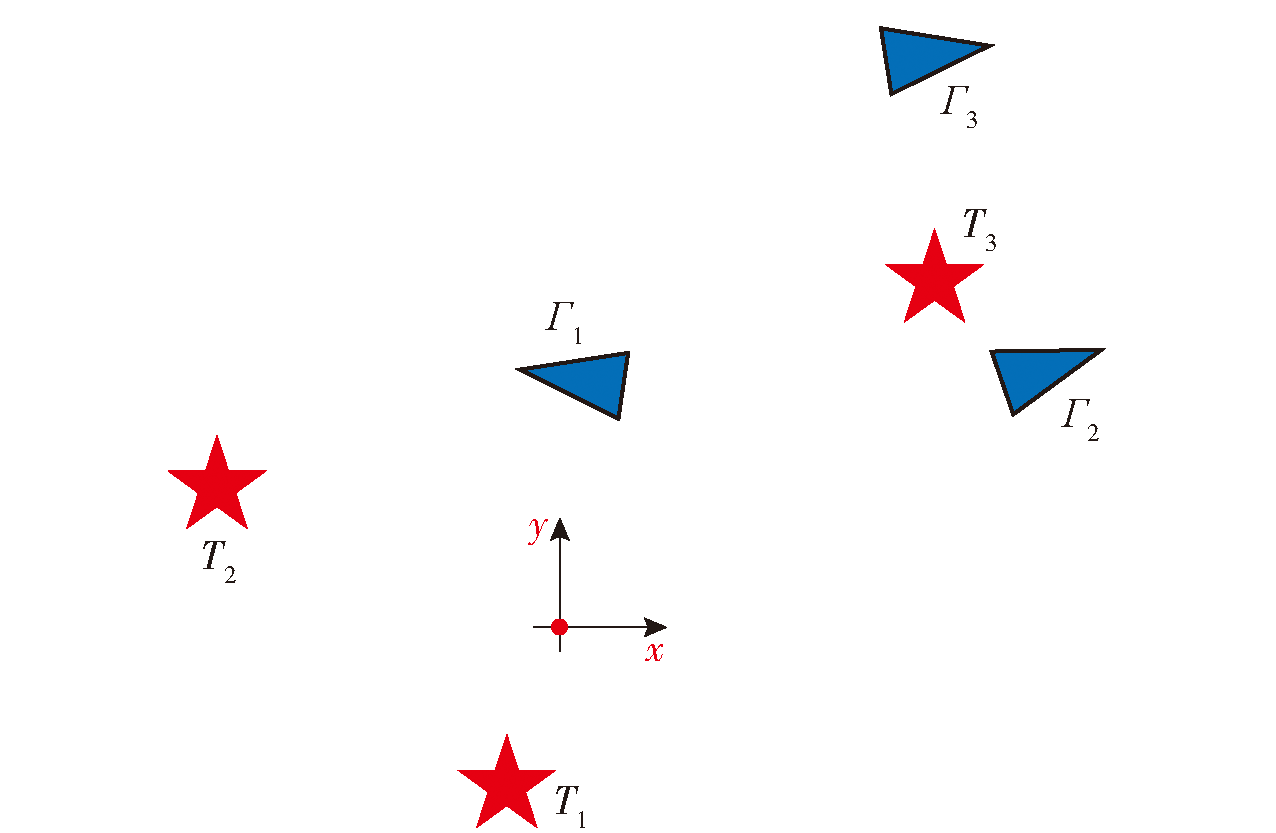
Fig.12 Schematic diagram of UAV and Enemy Target Information
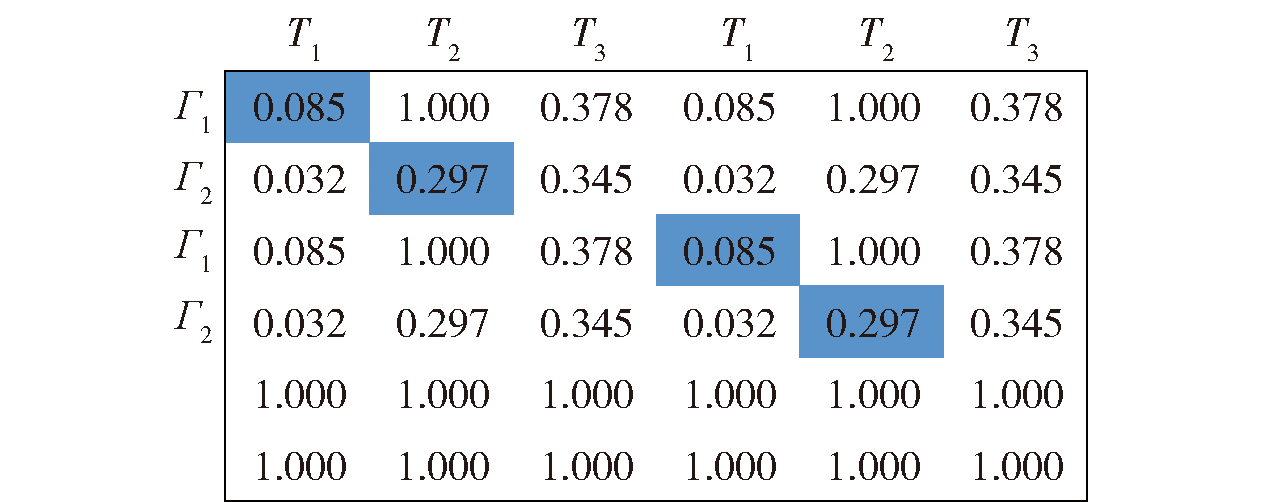
Fig.13 Unified efficiency matrix of UAV 1 by Hungary algorithm
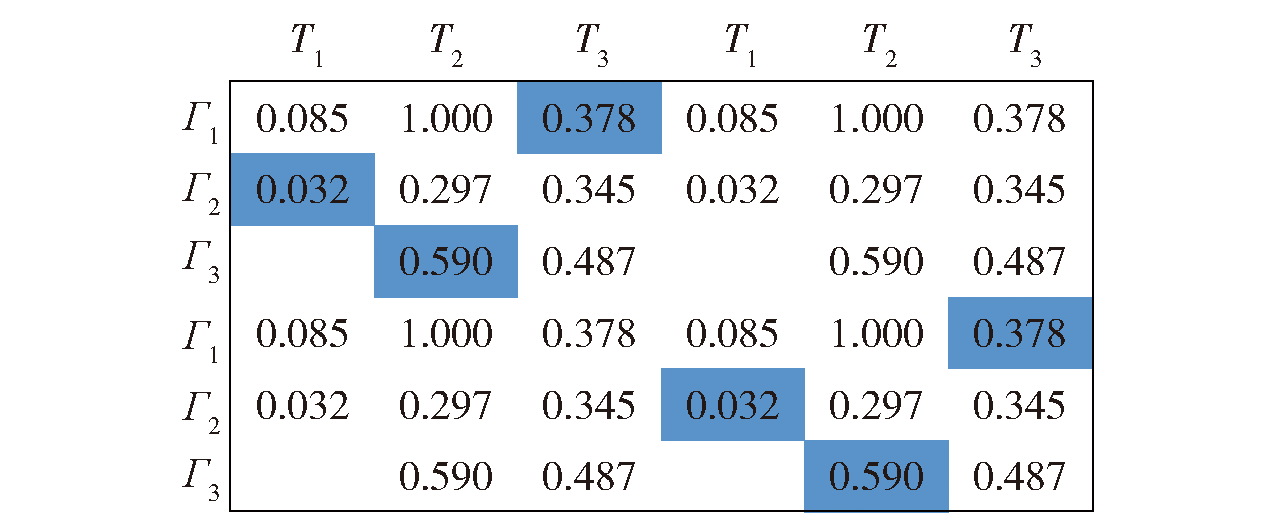
Fig.14 Unified efficiency matrix of UAV 2 by Hungary algorithm
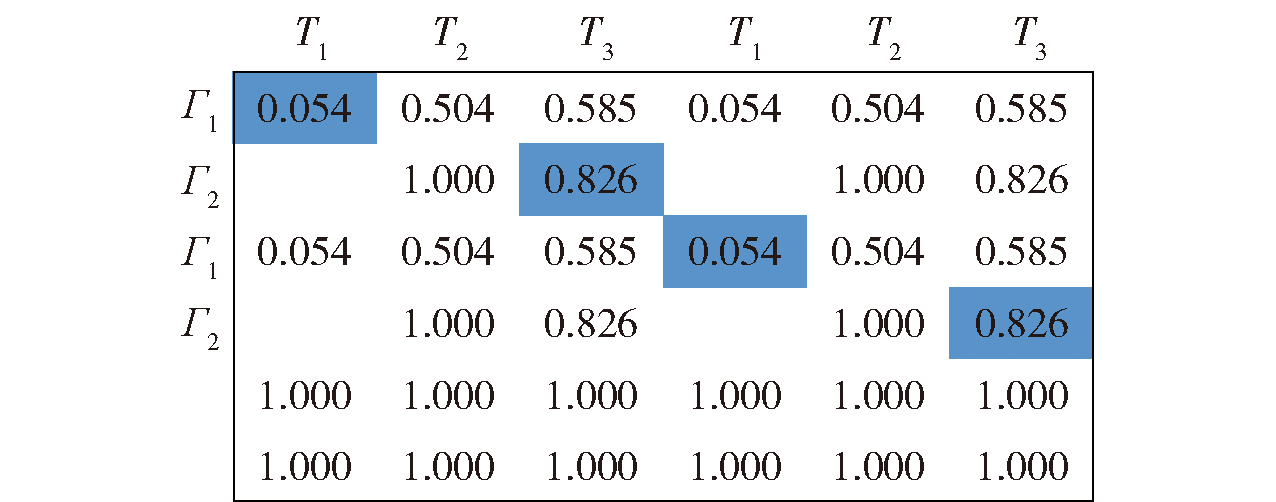
Fig.15 Unified efficiency matrix of UAV 3 by Hungary algorithm
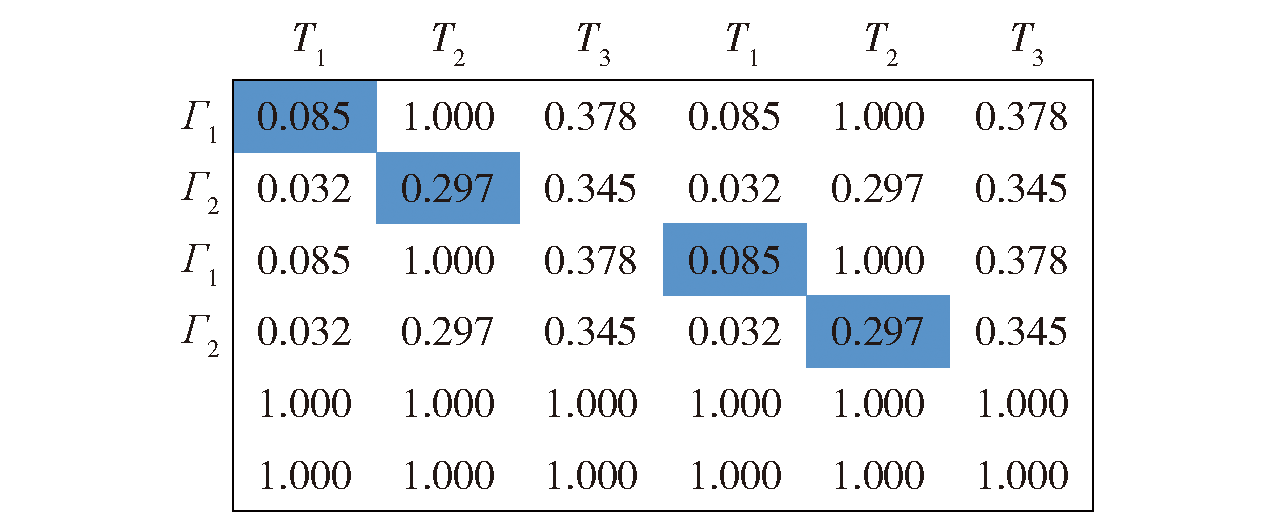
Fig.16 Unified efficiency matrix of UAV 1 by identity-based Hungary algorithm
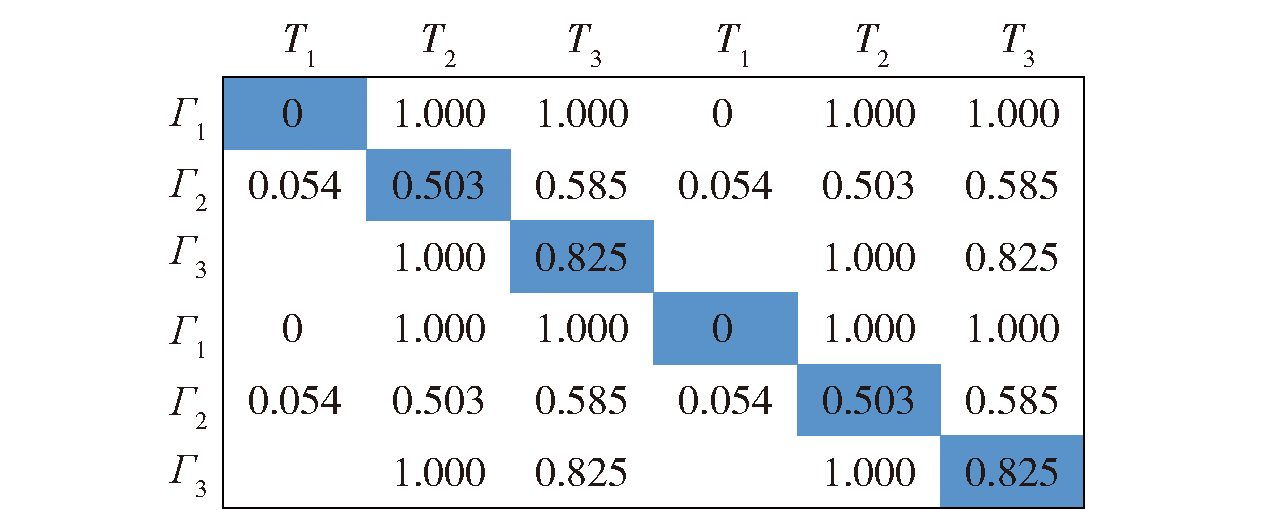
Fig.17 Unified efficiency matrix of UAV 2 by identity-based Hungary algorithm
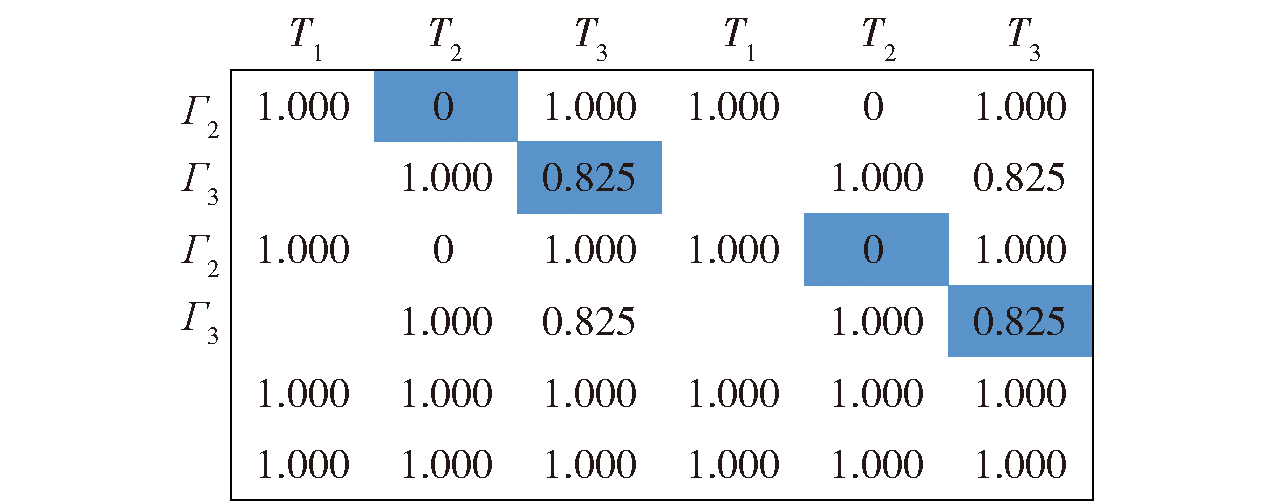
Fig.18 Unified efficiency matrix of UAV 3 by identity-based Hungary algorithm
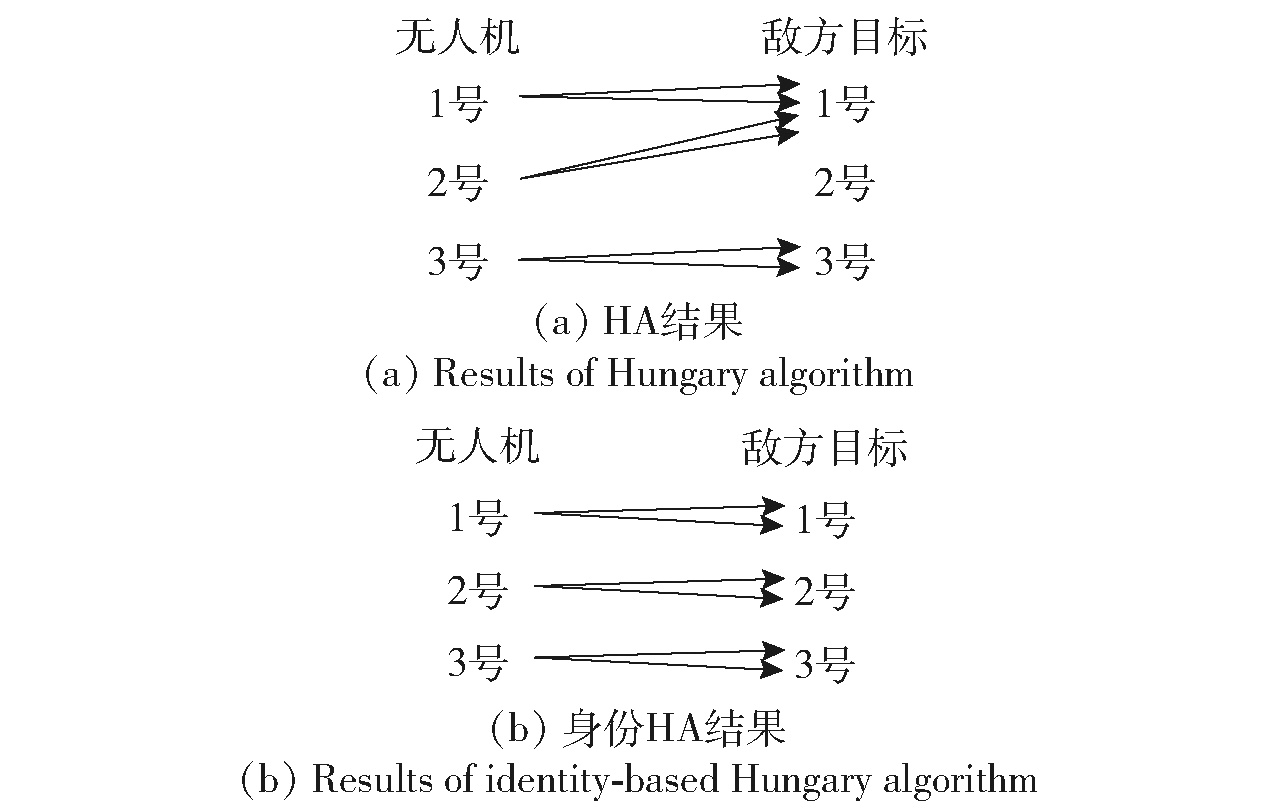
Fig.19 Results of target assignment
| [1] |
王祥科, 刘志宏, 丛一睿. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4):023732.
|
|
|
|
| [2] |
孙永芹, 马响玲, 叶文, 等. 超视距多机协同多目标攻击系统研究[J]. 系统仿真学报, 2008, 20(8):2161-2164.
|
|
|
|
| [3] |
兰俊龙, 赵思宏, 寇英信, 等. 多机协同多目标攻击空战战术决策[J]. 电光与控制, 2010, 17(12) :17-19.
|
|
|
|
| [4] |
肖冰松, 方洋旺, 夏海宝, 等. 多机协同对空目标探测与攻击任务的最优分配[J]. 火力与指挥控制, 2011, 36(6):19-23.
|
|
|
|
| [5] |
胡月, 丁萌, 姜欣言, 等. 一种面向有人/无人直升机协同打击的地面目标任务分配方法[J]. 航空科学技术, 2019, 30(10):64-69.
|
|
|
|
| [6] |
韩统, 崔明朗, 张伟, 等. 多无人机协同空战机动决策[J]. 兵工装备工程学报, 2020, 41(4):117-123.
|
|
|
|
| [7] |
doi: 10.3390/app11199254 URL |
| [8] |
doi: 10.1109/ACCESS.2022.3168718 URL |
| [9] |
李战武, 常一哲, 孙源源, 等. 中远距协同空战多目标攻击决策[J]. 火力与指挥控制, 2016, 41(2):36-40.
|
|
|
|
| [10] |
岳源, 屈高敏. 分布式多无人机协同侦察目标分配研究[J]. 兵工装备工程学报, 2018, 39(3):57-61,82.
|
|
|
|
| [11] |
doi: 10.1007/s10732-018-9401-1 |
| [12] |
吴文海, 郭晓峰, 周思羽, 等. 改进差分进化算法求解武器目标分配问题[J]. 系统工程与电子技术, 2021, 43(4):1012-1021.
|
|
|
|
| [13] |
黄刚, 李军华. 基于AC-DSDE进化算法多UAVs协同目标分配[J]. 自动化学报, 2021, 47(1):173-184.
|
|
|
|
| [14] |
朱建文, 赵长见, 李小平, 等. 基于强化学习的集群多目标分配与智能决策方法[J]. 兵工学报, 2021, 42(9):2040-2048.
|
|
doi: 10.3969/j.issn.1000-1093.2021.09.025 |
|
| [15] |
doi: 10.3390/electronics11111796 URL |
| [16] |
|
| [17] |
doi: 10.1002/nav.v2:1/2 URL |
| [18] |
doi: 10.1145/362919.362945 URL |
| [19] |
doi: 10.1016/j.tcs.2016.01.002 URL |
| [20] |
doi: 10.1109/TRO.2017.2693377 URL |
| [21] |
柳毅, 佟明安. HA在多目标分配中的应用[J]. 火力与指挥控制, 2002, 27(4):34-37.
|
|
|
|
| [22] |
|
| [23] |
张进, 郭浩, 陈统. 基于可适应HA的武器-目标分配问题[J]. 兵工学报, 2021, 42(6):1339-1344.
doi: 10.3969/j.issn.1000-1093.2021.06.025 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.025 |
|
| [24] |
doi: 10.1109/ACCESS.2022.3168359 URL |
| [25] |
林晨. 面向无人机集群任务分配的分布式算法研究[D]. 成都: 电子科技大学, 2019.
|
|
|
|
| [26] |
陈洁钰, 姚佩阳, 唐剑, 等. 多无人机分布式协同动态目标分配方法[J]. 空军工程大学学报:自然科学版, 2014, 15(6):11-16.
|
|
|
| [1] | GONG Yuanqiang, ZHANG Yepeng, MA Wanpeng, XUE Xiao. Mechanisms of Group Intelligence Emergence in UAV Swarms [J]. Acta Armamentarii, 2023, 44(9): 2661-2671. |
| [2] | ZHANG Qi, GE Yuxue, LI Pan, KANG Qijun, PEI Yang. Evaluation Method for SoS Contribution Rate of All-optical UAV Swarm Based on ABMS [J]. Acta Armamentarii, 2023, 44(11): 3422-3435. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||